Курсовая работа: Разработка и исследование оптического датчика перемещений
Описание
Содержание
ВВЕДЕНИЕ..................................................................................................... 31. Техническое задание на разработку устройства........................................ 6
3. Разработка структурной схемы устройства............................................. 10
4. Выбор свето- и фотодиодов и расчёт схемы излучателя и приёмника... 14
5. Расчёт мощности и максимального тока фотодиода................................ 16
6. Разработка и расчёт преобразователя «ток-напряжение»....................... 17
7. Разработка и расчёт компаратора на основе операционного усилителя с положительной обратной связью.................................................................. 18
8. Разработка семисегментного индикатора................................................. 21
9. Моделирование работы устройства.......................................................... 23ЗАКЛЮЧЕНИЕ............................................................................................. 25
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ...................................... 26
ПРИЛОЖЕНИЕ. ПРИНЦИПИАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ СХЕМА УСТРОЙСТВА И ПЕРЕЧЕНЬ ЭЛЕМЕНТОВ............................................. 27
ВВЕДЕНИЕ
Оптические датчики — это устройства, предназначенные для обнаружения света и его преобразования в электрические сигналы. Они способны распознавать характеристики световой волны, такие, как цвет и длину, а также интенсивность света, что позволяет им выполнять такие функции, как определение положения, обнаружение объектов и мониторинг окружающей среды. Распространенные типы оптических датчиков включают фотодиоды, фототранзисторы и датчики CCD (устройства с зарядовой связью), каждый из которых имеет уникальные характеристики, подходящие для конкретных приложений.
Энкодер или датчик угловых перемещений — это устройство, используемое для определения углового положения вращающегося объекта. В данном случае рассматривается абсолютный энкодер, который способен выдавать точные показания положений для каждого угла поворота, что даёт ему существенное преимущество над инкрементным датчиком, который измеряет изменение положения объекта. Абсолютные энкодеры обладают особой популярностью благодаря высокой точности и надежности, что позволяет применять их в различных отраслях жизнедеятельности, таких, как робототехника, промышленность, автоматизация, оптическая связь.
Поверхность диска абсолютного энкодера разделена на определенное количество секторов, каждому из которых присвоены определенные значения, которые можно представить в виде цифрового кода. Данные сектора считываются энкодером при вращении вала, в процессе считывания формируется абсолютный код. Код формируют метки, нанесенные на диск энкодера (Рисунок 1).

Рисунок 1. Циклические кодовые шкалы: а — линейная; б — круговая Данная особенность абсолютного энкодера позволяет определить, на
какой угол относительно нулевого сектора повернут диск энкодера в конкретный момент времени, поскольку при любом повороте диска абсолютный энкодер выдает значения номеров секторов. При достижении максимального значения, энкодер снова переходит в ноль и снова повторяет процесс расчета углового положения объекта.
Если запустить вращение вала энкодера в противоположном направлении, то он будет формировать значения в обратной последовательности, это позволяет определить направление вращения вала энкодера.
Значения считываются с помощью фотоэлемента, которая имеет множество фотодатчиков. Устройство абсолютного энкодера представлено на рисунке 2:
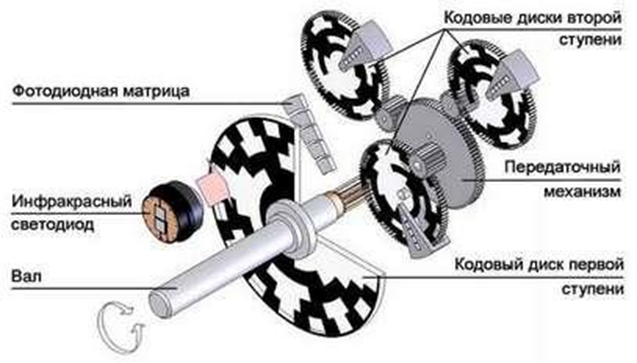
Рисунок 2. Устройство абсолютного энкодера
Кодовый диск первой ступени — это диск с кодовыми метками, который используется для определения положения объекта с высокой точностью. Кодовые метки могут быть выполнены в виде штрих-кодов или других оптических меток.
Кодовый диск второй ступени — аналогичный диск, но с другим набором кодовых меток, который используется для уточнения положения объекта.
Инфракрасный светодиод — это источник инфракрасного света, который освещает кодовые диски. Инфракрасный свет используется для того, чтобы избежать помех от внешнего освещения.
Передаточный механизм — это механизм, который передает движение от объекта к кодовым дискам. Он может включать в себя шестерни, ремни или другие элементы, которые обеспечивают точное и плавное движение.
Фотодиодная матрица — это устройство, которое принимает инфракрасный свет, отраженный от кодовых дисков. Она преобразует световые сигналы в электрические, которые затем обрабатываются для определения положения объекта.
Вал — это устройство, для передачи движения от объекта, положение которого измеряется, к кодовым дискам. Он является ключевым элементом, который обеспечивает механическую связь между объектом и датчиком.
Техническое задание на разработку устройства
Разработать абсолютный датчик угловых перемещений с диапазоном возможных перемещений 0°... +360° и с погрешностью измерения, равной 0,05% на 1 оборот.
 all_at_700
all_at_700















