86074 (612632), страница 2
Текст из файла (страница 2)
β∩γ = l, а т.к. образ пересечения равен пересечению образов, то g(β)∩g(γ) = g(l) и ![]() (g(β), g(γ)) =
(g(β), g(γ)) =
![]() (β, γ), если g – первого рода и
(β, γ), если g – первого рода и
![]() (g(β), g(γ)) = = -
(g(β), g(γ)) = = -
![]() (β, γ), если g– второго рода, поэтому
(β, γ), если g– второго рода, поэтому
 . (12)
. (12)
3. Трансформация гомотетии движением
Рассмотрим  . Пусть g(О)=А. Тогда по свойству неподвижных точек и двойных прямых, А – неподвижная точка преобразования , также мы имеем пучок неподвижных прямых в т. А, поэтому данное преобразование не может быть поворотной гомотетией или гомотетической симметрией. Следовательно,
. Пусть g(О)=А. Тогда по свойству неподвижных точек и двойных прямых, А – неподвижная точка преобразования , также мы имеем пучок неподвижных прямых в т. А, поэтому данное преобразование не может быть поворотной гомотетией или гомотетической симметрией. Следовательно, ![]() . Найдем коэффициент с, для этого рассмотрим точку М1, пусть |М1,A| = d.
. Найдем коэффициент с, для этого рассмотрим точку М1, пусть |М1,A| = d.
Пусть g(М1) = М, мы знаем, что g(О)=А тогда по свойствам движения |МО| = d.
Пусть  , по определению гомотетии |М2О| = kd.
, по определению гомотетии |М2О| = kd.
Пусть g(М2) = М3, по свойствам движения |М3А| = kd. А т.к. при гомотетии все расстояния изменяются в одно и то же число раз, то с = k. Следовательно,
 . (21)
. (21)
4. Трансформация гомотетии гомотетией
Найдем сначала композицию двух гомотетий  , для этого рассмотрим вектор
, для этого рассмотрим вектор  . По свойству гомотетии,
. По свойству гомотетии,  , а
, а  .
.
Рассмотрим первый случай, когда lk = 1, тогда мы получили преобразование, при котором вектор перешел сам в себя, а это параллельный перенос  . Найдем вектор
. Найдем вектор ![]() , для этого найдем образ точки О при этой композиции.
, для этого найдем образ точки О при этой композиции.
 , а
, а  :
:  . Тогда
. Тогда  . Значит, композиция двух гомотетий
. Значит, композиция двух гомотетий  при lk = 1 есть параллельный перенос на вектор
при lk = 1 есть параллельный перенос на вектор  .
.
 . (22)
. (22)
Рассмотрим второй случай, когда lk ≠ 1. Найдем неподвижные точки этого преобразования. Пусть точка М – неподвижная, тогда если  , а
, а  , то М = D, значит,
, то М = D, значит,  . Но
. Но 
 . Т.к. и
. Т.к. и ![]() , то
, то
 . Тогда
. Тогда  . Т.к. lk ≠ 1, то выразим вектор
. Т.к. lk ≠ 1, то выразим вектор ![]() :
: ![]() . Значит, у данного преобразования только одна неподвижная точка М, причем
. Значит, у данного преобразования только одна неподвижная точка М, причем
 , следовательно, точки O, Q, M лежат на одной прямой.
, следовательно, точки O, Q, M лежат на одной прямой.
Докажем теперь, что данное преобразование будет гомотетией с центром в т. М и коэффициентом lk. Возьмем произвольную точку Е, пусть  , а
, а 
 . Докажем, что
. Докажем, что  (рис. 2). Разложим векторы
(рис. 2). Разложим векторы  и
и  по векторам
по векторам  и
и  . По правилу треугольника,
. По правилу треугольника,  , а
, а  . Ранее мы выразили вектор
. Ранее мы выразили вектор ![]() через вектор
через вектор
 :
: ![]() , тогда вектор
, тогда вектор
выражается через вектор следующим образом:  . Вектор
. Вектор  при гомотетии
при гомотетии  переходит в вектор
переходит в вектор  , тогда
, тогда  . Значит,
. Значит,  . Теперь приведем подобные слагаемые и разложим вектор по векторам
. Теперь приведем подобные слагаемые и разложим вектор по векторам  и , после этого получим
и , после этого получим  . Вектор при гомотетии
. Вектор при гомотетии  переходит в вектор , значит,
переходит в вектор , значит, 
 , а вектор вновь выразим через , тогда
, а вектор вновь выразим через , тогда  . Приведем подобные слагаемые, получим
. Приведем подобные слагаемые, получим
 . По правилу треугольника
. По правилу треугольника
 , следовательно . Таким образом, мы показали, что преобразование произвольную точку E переводит в точку G такую, что , следовательно, это преобразование – гомотетия с центром в точке М и коэффициентом lk.
, следовательно . Таким образом, мы показали, что преобразование произвольную точку E переводит в точку G такую, что , следовательно, это преобразование – гомотетия с центром в точке М и коэффициентом lk.
 . (23)
. (23)
Сейчас найдем преобразование ![]() .
. ![]() , а это по формуле (23) равняется
, а это по формуле (23) равняется  ,
,  . Далее применяя формулу (23), получаем
. Далее применяя формулу (23), получаем
 ,
, ![]() . Выразим вектор
. Выразим вектор
 через вектор
через вектор  . По правилу треугольника,
. По правилу треугольника,  . Мы уже знаем, что
. Мы уже знаем, что ![]() , тогда
, тогда ![]() . Приведем подобные слагаемые, получим
. Приведем подобные слагаемые, получим
 . Так как , то
. Так как , то  . Значит,
. Значит,
 . Таким образом,
. Таким образом,
 . (24)
. (24)
5. Трансформация движения гомотетией
5.1. Трансформация осевой симметрии гомотетией
Рассмотрим  . По теореме о неподвижных точках, прямая
. По теореме о неподвижных точках, прямая  – неподвижная прямая преобразования , значит, это осевая симметрия с осью m.
– неподвижная прямая преобразования , значит, это осевая симметрия с осью m.
![]() . (25)
. (25)
5.2. Трансформация параллельного переноса гомотетией
 , но
, но  ,
,  . [1] Тогда
. [1] Тогда 
 , что по формуле (22) равняется
, что по формуле (22) равняется  . Следовательно,
. Следовательно,
 . (26)
. (26)
5.3. Трансформация произвольного движения гомотетией
Рассмотрим  . По теореме о неподвижных точках, неподвижными точками преобразования являются образы неподвижных точек движения f. Докажем, что это – движение.
. По теореме о неподвижных точках, неподвижными точками преобразования являются образы неподвижных точек движения f. Докажем, что это – движение.  . Рассмотрим точки А и L, |AL| = d. Пусть при гомотетии
. Рассмотрим точки А и L, |AL| = d. Пусть при гомотетии  они переходят соответственно в точки В и М, тогда |BM| = d/k. При движении f точки В и М переходят соответственно в точки С и N, тогда |CN| = d/k, т.к. движение сохраняет расстояния между точками. Пусть при гомотетии точки С и N переходят соответственно в точки D и P, |DP| = kd/k = d. Мы получили, что преобразование сохраняет расстояния между точками, значит, это движение, неподвижными точками которого являются образы неподвижных точек движения f, а т.к. вид движения определяется его неподвижными точками, то - движение того же вида, что и f.
они переходят соответственно в точки В и М, тогда |BM| = d/k. При движении f точки В и М переходят соответственно в точки С и N, тогда |CN| = d/k, т.к. движение сохраняет расстояния между точками. Пусть при гомотетии точки С и N переходят соответственно в точки D и P, |DP| = kd/k = d. Мы получили, что преобразование сохраняет расстояния между точками, значит, это движение, неподвижными точками которого являются образы неподвижных точек движения f, а т.к. вид движения определяется его неподвижными точками, то - движение того же вида, что и f.
6. Трансформация подобия гомотетией
Рассмотрим , где f – подобие. Известно, что подобие – это композиция движения и гомотетии, тогда  , а это, по формулам (2), равняется
, а это, по формулам (2), равняется  . Как было доказано в 5.3,
. Как было доказано в 5.3,  - движение того же вида, что и g, а по формуле (24)
- движение того же вида, что и g, а по формуле (24)  . Следовательно,
. Следовательно,  - подобие того же вида, что и f. Если f
- подобие того же вида, что и f. Если f  , то
, то
 . (27)
. (27)
7. Трансформация движения подобием
Пусть подобие – это композиция движения g и гомотетии , то движение f под подобием – это 
 . В силу ассоциативности композиции преобразований,
. В силу ассоциативности композиции преобразований, 
 . По доказанному в п. 5.3 = f1 - движение того же вида, что и f, а его неподвижные точки – образы неподвижных точек движения f при гомотетии . Тогда
. По доказанному в п. 5.3 = f1 - движение того же вида, что и f, а его неподвижные точки – образы неподвижных точек движения f при гомотетии . Тогда  . Но f1g = f2 – движение того же вида, что и f1, а его неподвижные точки – образы неподвижных точек движения f1 при движении g. Тогда
. Но f1g = f2 – движение того же вида, что и f1, а его неподвижные точки – образы неподвижных точек движения f1 при движении g. Тогда  - движение того же вида, что и f, а его неподвижные точки – образы неподвижных точек движения f при подобии
- движение того же вида, что и f, а его неподвижные точки – образы неподвижных точек движения f при подобии  .
.
8. Трансформация подобия движением
Пусть подобие – это композиция движения f и гомотетии , тогда подобие под движением g  по формулам (2) есть
по формулам (2) есть  . fg = f1 – движение того же вида, что и f, а его неподвижные точки – образы неподвижных точек движения f при движении g, а по формуле (21)
. fg = f1 – движение того же вида, что и f, а его неподвижные точки – образы неподвижных точек движения f при движении g, а по формуле (21)  . Тогда
. Тогда  , а это подобие.
, а это подобие.
 . (28)
. (28)
9. Трансформация гомотетии подобием
Рассмотрим 
 . В силу ассоциативности композиции преобразований,
. В силу ассоциативности композиции преобразований, 
 . По формуле (24),
. По формуле (24), ![]() , . Тогда
, . Тогда 
 (по формуле (21)). Таким образом,
(по формуле (21)). Таким образом,
 . (29)
. (29)
10. Трансформация подобия подобием
Подобие φ под подобием ψ  . По формулам (2),
. По формулам (2),  .
.  - движение того же вида, что и f, а его неподвижные точки – образы неподвижных точек движения f при подобии ψ. По формуле (29),
- движение того же вида, что и f, а его неподвижные точки – образы неподвижных точек движения f при подобии ψ. По формуле (29),  . Тогда
. Тогда
 , (30)
, (30)
где ξ - подобие такое, что  , , а h – движение того же вида, что и f, а его неподвижные точки – образы неподвижных точек движения f при подобии ψ.
, , а h – движение того же вида, что и f, а его неподвижные точки – образы неподвижных точек движения f при подобии ψ.
11. Трансформация движения аффинным преобразованием
11.1. Трансформация параллельного переноса аффинным преобразованием
Р ассмотрим произвольную точку М, найдем ее образ при преобразовании
ассмотрим произвольную точку М, найдем ее образ при преобразовании  . При преобразовании g-1 она переходит в точку М1 (рис. 3), которая при параллельном переносе
. При преобразовании g-1 она переходит в точку М1 (рис. 3), которая при параллельном переносе  прейдет в точку М2,
прейдет в точку М2,  , далее М2 при преобразовании g перейдет в точку М3. Заметим, что вектор
, далее М2 при преобразовании g перейдет в точку М3. Заметим, что вектор  при преобразовании g перейдет в вектор
при преобразовании g перейдет в вектор  , значит, вся трансформация
, значит, вся трансформация  есть параллельный перенос на вектор
есть параллельный перенос на вектор  .
.
 , (31)
, (31)
где .
11.2. Трансформация центральной симметрии аффинным преобразованием
Р
g(O)
 ассмотрим произвольную точку М, найдем ее образ при преобразовании
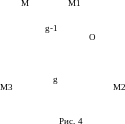
ассмотрим произвольную точку М, найдем ее образ при преобразовании  . При преобразовании g-1 она переходит в точку М1 (рис. 4), которая при центральной симметрии ZO прейдет в точку М2, О – середина М1М2, далее М2 при преобразовании g перейдет в точку М3. Заметим, что точка О при преобразовании g перейдет в середину отрезка ММ3 (т.к. при аффинном преобразовании сохраняется принадлежность точек одной прямой и отношение расстояний между ними), а по теореме о неподвижной точке g(O) будет неподвижной точкой нового преобразования, значит, вся трансформация
. При преобразовании g-1 она переходит в точку М1 (рис. 4), которая при центральной симметрии ZO прейдет в точку М2, О – середина М1М2, далее М2 при преобразовании g перейдет в точку М3. Заметим, что точка О при преобразовании g перейдет в середину отрезка ММ3 (т.к. при аффинном преобразовании сохраняется принадлежность точек одной прямой и отношение расстояний между ними), а по теореме о неподвижной точке g(O) будет неподвижной точкой нового преобразования, значит, вся трансформация  есть центральная симметрия Zg(O).
есть центральная симметрия Zg(O).  . (32)
. (32)
11.2. Трансформация осевой симметрии аффинным преобразованием
Р
 ассмотрим произвольную точку М, найдем ее образ при преобразовании
ассмотрим произвольную точку М, найдем ее образ при преобразовании 
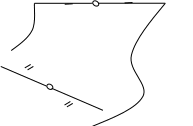
 . При преобразовании g-1 она переходит в точку М1 (рис. 5), которая при осевой симметрии Sl прейдет в точку М2,
. При преобразовании g-1 она переходит в точку М1 (рис. 5), которая при осевой симметрии Sl прейдет в точку М2, 
 , О – середина М1М2, далее М2 при преобразовании g перейдет в точку М3. Заметим, что точка О при преобразовании g перейдет в середину отрезка ММ3 (т.к. при аффинном преобразовании сохраняется принадлежность точек одной прямой и отношение расстояний между ними), и ее образ – О1 – будет лежать на образе прямой l при преобразовании g - g(l). По теореме о неподвижных прямых, прямая g(l) будет неподвижной прямой нового преобразования. Заметим также, что если при осевой симметрии прямые, соединяющие точки с их образами, были параллельны, то и после трансформации они будут параллельны и наклонены под одним и тем же углом к прямой g(l), значит, вся трансформация
, О – середина М1М2, далее М2 при преобразовании g перейдет в точку М3. Заметим, что точка О при преобразовании g перейдет в середину отрезка ММ3 (т.к. при аффинном преобразовании сохраняется принадлежность точек одной прямой и отношение расстояний между ними), и ее образ – О1 – будет лежать на образе прямой l при преобразовании g - g(l). По теореме о неподвижных прямых, прямая g(l) будет неподвижной прямой нового преобразования. Заметим также, что если при осевой симметрии прямые, соединяющие точки с их образами, были параллельны, то и после трансформации они будут параллельны и наклонены под одним и тем же углом к прямой g(l), значит, вся трансформация  есть косая симметрия Sg(l).
есть косая симметрия Sg(l).
 . (33)
. (33)
12. Трансформация гомотетии аффинным преобразованием
Р
 ассмотрим произвольную точку М, найдем ее образ при преобразовании
ассмотрим произвольную точку М, найдем ее образ при преобразовании  . При преобразовании g-1 она переходит в точку М1 (рис. 6), которая при гомотетии прейдет в точку М2,
. При преобразовании g-1 она переходит в точку М1 (рис. 6), которая при гомотетии прейдет в точку М2,  , далее М2 при преобразовании g перейдет в точку М3. Заметим, что точка О при преобразовании g перейдет в точку О1 на прямой ММ3, причем
, далее М2 при преобразовании g перейдет в точку М3. Заметим, что точка О при преобразовании g перейдет в точку О1 на прямой ММ3, причем  (т.к. при аффинном преобразовании сохраняется принадлежность точек одной прямой и отношение расстояний между ними), а по теореме о неподвижной точке точка О1 будет неподвижной при новом преобразовании, значит, вся трансформация есть гомотетия
(т.к. при аффинном преобразовании сохраняется принадлежность точек одной прямой и отношение расстояний между ними), а по теореме о неподвижной точке точка О1 будет неподвижной при новом преобразовании, значит, вся трансформация есть гомотетия  .
.
. (35)
13. Трансформация аффинного преобразования гомотетией
Далее будем предполагать, что аффинные преобразования g и g-1 заданы аналитически.
g:  g-1:
g-1:  где образы начала координат и базисных векторов при преобразовании g имеют координаты: O’(d1, d2, d3),
где образы начала координат и базисных векторов при преобразовании g имеют координаты: O’(d1, d2, d3),  (a1, a2, a3),
(a1, a2, a3),  (b1, b2, b3),
(b1, b2, b3),  (c1, c2, c3), а при преобразовании g-1 O’’(n1, n2, n3),
(c1, c2, c3), а при преобразовании g-1 O’’(n1, n2, n3),  (k1, k2, k3),
(k1, k2, k3),  (l1, l2, l3),
(l1, l2, l3),  (m1, m2, m3).
(m1, m2, m3).
















