Другое 126: 126В - Проектирование и исследование механизмов упаковочного автомата вариант В
-61%
Описание
Реферат
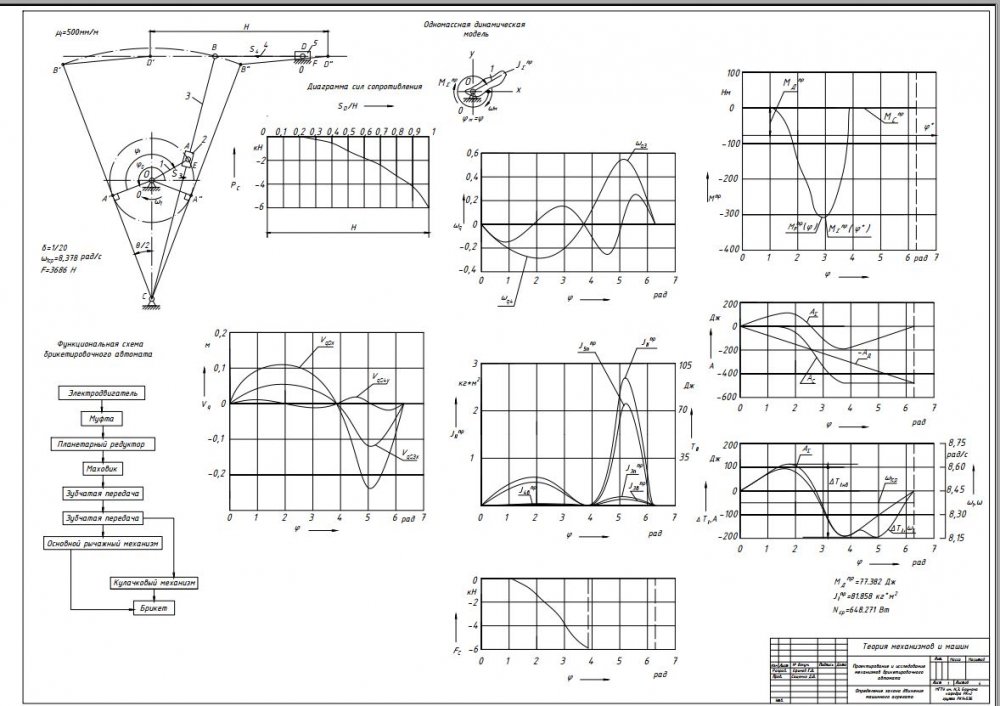
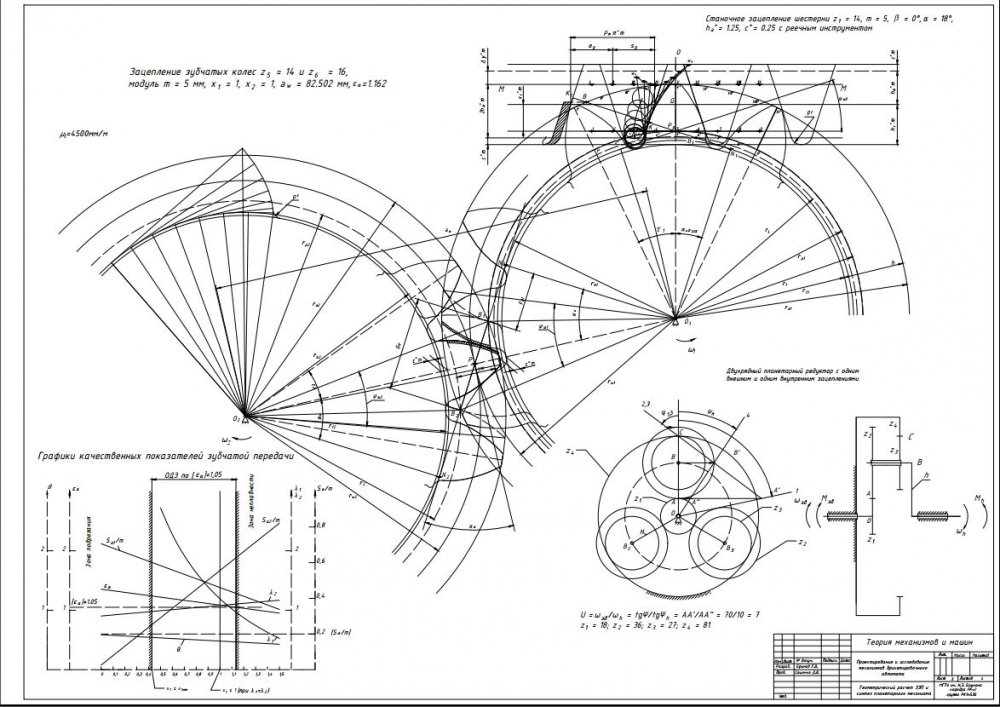
Расчетно-пояснительная записка к курсовому проекту «Проектирование и исследование механизмов упаковочного автомата»содержит 52 страницы машинописного текста, 25 рисунков, 8 таблиц. В расчетно-пояснительной записке приведено проектирование основного механизма упаковочного автомата, определение закона движения звена приведения, расчет дополнительной маховой массыс учетом заданного коэффициента неравномерности вращения кривошипа, кинетостатический силовой расчет основного механизма, проектирование цилиндрической эвольвентной зубчатой передачи, проектирование двухрядного планетарного редуктора, проектирование кулачкового механизма с силовым замыканием высшей пары.
1 ТЕХНИЧЕСКОЕ ЗАДАНИЕ
1.1 Описание работы механизма
Автомат, кинематическая схема которого представлена на рис.1.1, предназначен для горизонтального и вертикального перемещений упакованных изделий в автоматизированном технологическом комплексе. Коленчатый вал 1 приводится в движение от электродвигателя 13 через муфту 14, планетарный редуктор 15, прямозубую зубчатую передачу (число зубьев колес Z16,Z17) и цепную передачу 7, передаточное число которой равно единице. На коленчатом валу 1 установлен маховик 18. Рычажный механизм шестизвенный кулисный механизм, предназначенный для горизонтального перемещения изделия И, состоит из кривошипа (коленчатого вала) 1, шатуна (кулисного камня) 2, кулисы 3, шатуна 4 и ползуна 5. При рабочем ходе механизма преодолевается сила трения F5Т между ползуном 5, перемещающим изделие И, и направляющими стойки 6. Во время вспомогательного хода (в. x.) ползуна 5 происходит вертикальное перемещение изделия И при помощи ползуна 12 на величину HL . Ползун 12 через шатун 11 связан с толкателем 10 кулачкового механизма, состоящего из кулачка 8 и роликового толкателя 10. Допускаемый угол давления в кулачковом механизме =30O . Закон изменения ускорения толкателя в зависимости от угла поворота кулачка показан на рис.1.2.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Расчетно-пояснительная записка к курсовому проекту «Проектирование и исследование механизмов упаковочного автомата»содержит 52 страницы машинописного текста, 25 рисунков, 8 таблиц. В расчетно-пояснительной записке приведено проектирование основного механизма упаковочного автомата, определение закона движения звена приведения, расчет дополнительной маховой массыс учетом заданного коэффициента неравномерности вращения кривошипа, кинетостатический силовой расчет основного механизма, проектирование цилиндрической эвольвентной зубчатой передачи, проектирование двухрядного планетарного редуктора, проектирование кулачкового механизма с силовым замыканием высшей пары.
1 ТЕХНИЧЕСКОЕ ЗАДАНИЕ
1.1 Описание работы механизма
Автомат, кинематическая схема которого представлена на рис.1.1, предназначен для горизонтального и вертикального перемещений упакованных изделий в автоматизированном технологическом комплексе. Коленчатый вал 1 приводится в движение от электродвигателя 13 через муфту 14, планетарный редуктор 15, прямозубую зубчатую передачу (число зубьев колес Z16,Z17) и цепную передачу 7, передаточное число которой равно единице. На коленчатом валу 1 установлен маховик 18. Рычажный механизм шестизвенный кулисный механизм, предназначенный для горизонтального перемещения изделия И, состоит из кривошипа (коленчатого вала) 1, шатуна (кулисного камня) 2, кулисы 3, шатуна 4 и ползуна 5. При рабочем ходе механизма преодолевается сила трения F5Т между ползуном 5, перемещающим изделие И, и направляющими стойки 6. Во время вспомогательного хода (в. x.) ползуна 5 происходит вертикальное перемещение изделия И при помощи ползуна 12 на величину HL . Ползун 12 через шатун 11 связан с толкателем 10 кулачкового механизма, состоящего из кулачка 8 и роликового толкателя 10. Допускаемый угол давления в кулачковом механизме =30O . Закон изменения ускорения толкателя в зависимости от угла поворота кулачка показан на рис.1.2.





Файлы условия, демо
Характеристики учебной работы
Тип
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Номер задания
Вариант
Просмотров
257
Размер
1,74 Mb
Список файлов
Проект №126В (Проектирование и исследование механизмов упаковочного автомата)
Capture.JPG
Лист 1.pdf
Лист 2.pdf
Лист 3.pdf
Лист 4.pdf
РПЗ.pdf

Друзья, спасибо за доверие! Если вам понравилась работа – поставьте 5⭐ и напишите отзыв. Это поможет другим студентам, а мне даст силы делать ещё больше качественных материалов для вас 🔥
 anhyeuem
anhyeuem
03 сентября 2021 в 14:19
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!