Решенные билеты (1085496), страница 10
Текст из файла (страница 10)
Упорядочим апостериорные вероятности:
![]()
и возьмем процедуру B (Байесовская оптимальная) следующего вида по принятому X вычисляем и упорядочиваем апостериорные вероятности
![]()
и взяли элемент, который стоит в первом ряду этого неравенства.
При заданном X берем элемент ![]() на котором достигается max апостериорных вероятностей.
на котором достигается max апостериорных вероятностей.
![]() - вероятность того, что при заданном X было во второй компоненте значение
- вероятность того, что при заданном X было во второй компоненте значение
Очевидно, что ![]()
![]() и отсюда следует, что
и отсюда следует, что
![]()
![]()
![]()
По X ставим ![]() оценки по max апостериорных вероятностей.
оценки по max апостериорных вероятностей.

I(A) индикаторная функция события A.
![]() процедура
процедура ![]() процедура классификации эквивалентная разбиению
процедура классификации эквивалентная разбиению 

Что представляют собой области ![]() для Байесовской процедуры.
для Байесовской процедуры.

отсюда следует, что
![]()
тогда
![]()
Распределение Пуассона.
![]() -Распределение Пуассона с параметром
-Распределение Пуассона с параметром ![]() .
.
![]() - распределение числа событий на единичном интервале времени.
- распределение числа событий на единичном интервале времени.
![]()
- средняя интенсивность потока на единичном отрезке времени.
Л----------------------------------------------------------------------- )
Лазер испускает отдельные фотоны. Регистрация этих фотонов происходит в соответствии с распределением Пуассона, т.е. поток фотонов это простейший Пуассоновский поток событий.
![]()
Нужно выбрать такие малые интервалы времени, в которых регистрация двух и более фотонов происходила с малой вероятностью.
Это нужно, чтобы подслушиватель в принципе не мог перехватить в интервале t один фотон, и другой без изменений отправить к легитимному участнику квантовой криптографической связи.
Мы хотим передать 103бит ключа и допускаем чтобы противнику было известно не более 10 бит. Это означает, что примерно на 103 интервалов времени где вообще были зарегистрированы фотоны приходится не более 10 интервалов времени, где были 2 и более фотонов.
Будем предполагать, что - известна. оценивается посредством длительного тестирования лазера.
0 1 2 3 … N
|-----|-----|-----|-----|-----|----|-----|-----|-----|----|-----|-----|-----|----|-----|-----|---|-----|-----|
t плохие

- известно.
Выберем такое малое t, чтобы t = 10-2, тогда
![]()
![]()
![]()
Основные понятия марковских процессов
Марковские случайные процессы названы по имени выдающегося русского математика А.А. Маркова (1856-1922), впервые начавшего изучение вероятностной связи случайных величин и создавшего теорию, которую можно назвать “динамикой вероятностей”. В дальнейшем основы этой теории явились исходной базой общей теории случайных процессов, а также таких важных прикладных наук, как теория диффузионных процессов, теория надежности, теория массового обслуживания и т.д. В настоящее время теория марковских процессов и ее приложения широко применяются в самых различных областях таких наук, как механика, физика, химия и др.
Благодаря сравнительной простоте и наглядности математического аппарата, высокой достоверности и точности получаемых решений особое внимание марковские процессы приобрели у специалистов, занимающихся исследованием операций и теорией принятия оптимальных решений.
Практическое применение теории марковских цепей требует знания некоторых терминов и основных положений, на которых следует остановиться перед изложением примеров.
Марковские случайные процессы относятся к частным случаям случайных процессов (СП). В свою очередь, случайные процессы основаны на понятии случайной функции (СФ).
Случайной функцией называется функция, значение которой при любом значении аргумента является случайной величиной (СВ). По- иному, СФ можно назвать функцию, которая при каждом испытании принимает какой-либо заранее неизвестный вид.
Такими примерами СФ являются: колебания напряжения в электрической цепи, скорость движения автомобиля на участке дороги с ограничением скорости, шероховатость поверхности детали на определенном участке и т.д.
Как правило, считают, что если аргументом СФ является время, то такой процесс называют случайным. Существует и другое, более близкое к теории принятия решений, определение СП. При этом под случайным процессом понимают процесс случайного изменения состояний какой-либо физической или технической системы по времени или какому-либо другому аргументу.
Нетрудно заметить, что если обозначить состояние ![]() и изобразить зависимость
и изобразить зависимость ![]() , то такая зависимость и будет случайной функцией.
, то такая зависимость и будет случайной функцией.
СП классифицируются по видам состояний ![]() и аргументу t. При этом СП могут быть с дискретными или непрерывными состояниями или временем. Например, любой выборочный контроль продукции будет относиться к СП с дискретными состояниями (
и аргументу t. При этом СП могут быть с дискретными или непрерывными состояниями или временем. Например, любой выборочный контроль продукции будет относиться к СП с дискретными состояниями (![]() - годная,
- годная, ![]() - негодная продукция) и дискретным временем (
- негодная продукция) и дискретным временем (![]() ,
, ![]() - времена проверки). С другой стороны, случай отказа любой машины можно отнести к СП с дискретными состояниями, но непрерывным временем. Проверки термометра через определенное время будут относиться к СП с непрерывным состоянием и дискретным временем. В свою очередь, например, любая осциллограмма будет записью СП с непрерывными состояниями и временем.
- времена проверки). С другой стороны, случай отказа любой машины можно отнести к СП с дискретными состояниями, но непрерывным временем. Проверки термометра через определенное время будут относиться к СП с непрерывным состоянием и дискретным временем. В свою очередь, например, любая осциллограмма будет записью СП с непрерывными состояниями и временем.
Кроме указанных выше примеров классификации СП существует еще одно важное свойство. Это свойство описывает вероятностную связь между состояниями СП. Так, например, если в СП вероятность перехода системы в каждое последующее состояние зависит только от предыдущего состояния, то такой процесс называется процессом без последействия (рис.1).
Зависимость ![]() называют переходной вероятностью, часто говорят, что именно процесс
называют переходной вероятностью, часто говорят, что именно процесс![]() без последействия обладает марковским свойством, однако, строго говоря, здесь есть одна неточность. Дело в том, что можно представить себе СП, в котором вероятностная связь существует не только с предшествующими, но и более ранними (
без последействия обладает марковским свойством, однако, строго говоря, здесь есть одна неточность. Дело в том, что можно представить себе СП, в котором вероятностная связь существует не только с предшествующими, но и более ранними (![]() ) состояниями, т.е.
) состояниями, т.е.
![]()

(1)
Рис. 1. Схема процесса без последействия
Такие процессы также рассматривались А.А. Марковым, который предложил называть их в отличие от первого случая (простой цепи) - сложной цепью. В настоящее время теория таких цепей разработана слабо и обычно применяют так называемый процесс укрупнения состояний путем математических преобразований, объединяя предшествующие состояния в одно.
Это обстоятельство должно обязательно учитываться при составлении математических моделей принятия решений.
Выше мы совершили незаметный терминологический переход от понятия СП к “марковской цепи”. Теперь эту неясность следует устранить. Отметим, во-первых, что случайный процесс с дискретными состояниями и временем называется случайной последовательностью.
Если случайная последовательность обладает марковским свойством, то она называется цепью Маркова.
С другой стороны, если в случайном процессе состояния дискретны, время непрерывно и свойство последействия сохраняется, то такой случайный процесс называется марковским процессом с непрерывным временем.
Марковский СП называется однородным, если переходные вероятности ![]() остаются постоянными в ходе процесса.
остаются постоянными в ходе процесса.
Цепь Маркова считается заданной, если заданы два условия.
1. Имеется совокупность переходных вероятностей в виде матрицы:
 . (2)
. (2)
2. Имеется вектор начальных вероятностей
![]() , ….. (3)
, ….. (3)
описывающий начальное состояние системы.
Матрица (2) называется переходной матрицей (матрицей перехода). Элементами матрицы являются вероятности перехода из i-го в j-е состояние за один шаг процесса. Переходная матрица (2) обладает следующими свойствами:
a) ![]() , (3a)
, (3a)
б) ![]() .
.
Матрица, обладающая свойством (3a), называется стохастической. Кроме матричной формы модель марковской цепи может быть представлена в виде ориентированного взвешенного графа (рис. 2).
![]()
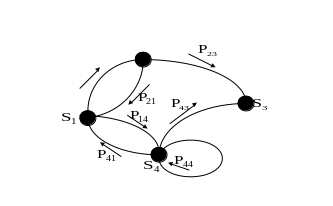
Рис. 2. Ориентированный взвешенный граф
Вершины графа обозначают состояние ![]() , а дуги- переходные вероятности.
, а дуги- переходные вероятности.
Множество состояний системы марковской цепи, определенным образом классифицируется с учетом дальнейшего поведения системы.
1. Невозвратное множество (рис. 3).
Рис. 3. Невозвратное множество 
В случае невозвратного множества возможны любые переходы внутри этого множества. Система может покинуть это множество, но не может вернуться в него.
2. Возвратное множество (рис. 4).
Р![]()
ис. 4. Возвратное множество

В этом случае также возможны любые переходы внутри множества. Система может войти в это множество, но не может покинуть его.
3. Эргодическое множество (рис. 5).

Рис. 5. Эргодическое множество
В случае эргодического множества возможны любые переходы внутри множества, но исключены переходы из множества и в него.
4. Поглощающее множество (рис. 6)

Рис. 6. Поглощающее множество
При попадании системы в это множество процесс заканчивается.















