
Регулируемый привод станков с чпу
Регулируемый привод станков с чпу.
Регулируемый привод применяют в механизмах главного движения станков с ЧПУ, а кроме того он является главным структурным компонентом следящего привода подачи станков с ЧПУ. Регулируемый привод для станков с ЧПУ выполняют по схеме "теристорный преобразователь - двигатель" (ТП - Д) и регулируют напряжением в цепи якоря при неизменном возбуждении, что обеспечивает постоянный максимально - допустимый момент на всем диапазоне регулирования.
 |
Особенностью этих приводов является широкий диапазон регулирования частоты вращения от Д = 1:1000 до Д = 1:50000,что позволяет полностью обеспечить не только рабочие движения, связанные с технологическим процессом обработки, но также и быстрые установочные перемещения без применения промежуточных механических передач. Минимальная частота вращения привода должна составлять 1 об/ мин, а в некоторых случаях 0,1 об/мин.
При малых скоростях привод должен обеспечить равномерное перемещение. Современный регулируемый привод должен обладать высоким быстродействием при переходе с одной установочной частоты на другую.
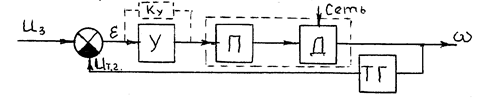
Силовая часть регулируемого привода должна состоять из двигателя Д и силового преобразователя П ,который преобразует переменное напряжение на якоре двигателя.
Для увеличения диапазона регулирования привод охватывается жесткой обратной связью по частоте вращения. Для этого на валу двигателя Д устанавливается тахогенератор ТГ, напряжение которого пропорционально угловой скорости .Это напряжение сравнивается с задающем. Разность напряжений задающего и тахогенератора усиливается усилителем У и подается на силовой преобразователь П. Точность работы привода и диапазон регулирования увеличиваются по мере возрастания общего коэффициента передачи К. Однако чрезмерное увеличение К может привести к потери устойчивости системы. Во избежание этого и для обеспечения требуемого быстродействия в приводе применяются специальные корректирующие устройства.
Точность работы привода в большей степени зависит от точности и стабильности характеристик цепи обратной связи по частоте вращения и в первую очередь от стабильности коэффициента передачи тахогенератора. К остальным элементам привода, охваченным обратной связью, таких жестких требований по стабильности характеристик не предъявляется.



















