
Применение датчиков давления в системах навигации летательных аппаратов
4 Применение датчиков давления в системах навигации ла
4.1 Высота полета и ее измерение
Любой навигационной системе, установленной на ЛА, необходимо определять свое положение относительно поверхности Земли. Применение электронного высотомера на основании датчика давления является эффективным решением данной проблемы в большом диапазоне высот.
4.1.1 Высота полета
Высотой полета принято называть расстояние до ЛА, отсчитанное по вертикали от некоторого уровня, принятого за начало отсчета. В воздухоплавании принята классификация высот полета по уровню начала отсчета (смотри рис. 4.1):
|
|
| Рис. 4.1. Классификация высот полета по уровню начала отсчета |
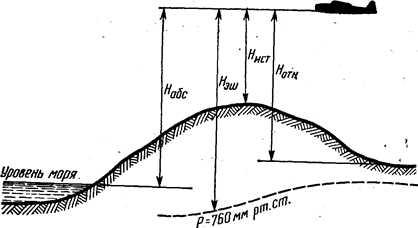
Истинная высота Нист отсчитывается от точки земной поверхности, находящейся под самолетом;
относительная Нотн - от условного уровня (уровня аэродрома, цели и др.);
абсолютная Набс - от уровня моря;
высота эшелона Нэш - от условного уровня, который соответствует стандартному атмосферному давлению 760 мм рт. ст. [9].
4.1.2 Способы измерения
Высота полета измеряется барометрическим, радиотехническим, инерциальным и электростатическим методами. Основными методами являются барометрический и радиотехнический.
Рекомендуемые материалы
С помощью радиовысотомера можно определить истинную высоту полета. Высота находится по времени  прохождения радиоволнами расстояния, равного удвоенной истинной высоте полета, т.е.
прохождения радиоволнами расстояния, равного удвоенной истинной высоте полета, т.е.
|
| (4.1) |
 ,
,где  - скорость распространения радиоволн.
- скорость распространения радиоволн.
Радиовысотомеры обеспечивают высокую точность измерений. Их показания практически не зависят от метеоусловий и скорости полета, однако на практике они используются только как контрольные приборы, например в системе сигнализации опасного сближения с землей, и при посадке в сложных метеорологических условиях. Это объясняется тем, что при выдерживании определенной высоты полета по радиовысотомеру траектория полета летательного аппарата повторяет профиль рельефа местности, что неудобно для экипажа и пассажиров и становится одной из причин болтанки.
Поэтому основным прибором для определения высоты полета является барометрический высотомер [10].
4.1.3 Изменение атмосферного давления с высотой
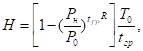
Барометрический метод измерения высоты основан на использовании закономерного изменения атмосферного давления с высотой (смотри рис. 4.2) [11]. Зависимость давления воздуха от высоты до 11000 м выражается формулой:
|
| (4.2) |
Решая это уравнение относительно высоты, получим:
|
| (4.3) |
где
 - газовая постоянная (29.27 м/град).
- газовая постоянная (29.27 м/град).
Из формулы видно, что измеряемая высота является функцией четырех параметров: давления на высоте полета  , давления и температуры на уровне начала отсчета высоты
, давления и температуры на уровне начала отсчета высоты  и
и  и температурного градиента
и температурного градиента  [9].
[9].
Если принять параметры , и постоянными, то высоту можно определить как функцию атмосферного давления и проблема вычисления высоты сводится к проблеме измерения атмосферного давления. Давление на высоте полета можно измерить непосредственно на самолете с помощью барометра (анероида).
|
|
| Рис. 4.2. Изменение атмосферного давления с высотой |
4.2 Чувствительные элементы барометрических высотомеров. Кремниевые датчики давления
Барометрические высотомеры используются в воздухоплавании очень давно. Изначально в качестве чувствительных элементов высотомеров использовались металлические анероидные коробки, что делало приборы тяжелыми и громоздкими. Эти приборы со стрелочным индикатором были тяжелы в настройке, имели небольшую точность и не могли учитывать влияние температуры. С появлением микросистемной техники были созданы кремниевые датчики давления, позволившие решить указанные проблемы, значительно уменьшив массу и габариты высотомеров.
Рассмотрим двухстрелочные высотомеры ВД-10, ВД-17, ВД-20. Все они построены по одинаковой схеме и отличаются друг от друга главным образом диапазоном измерения.
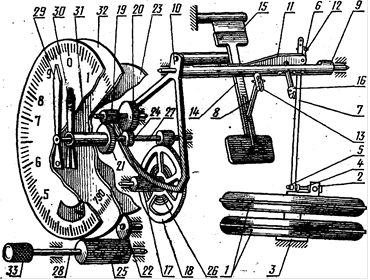
Основными узлами высотомера являются чувствительный элемент, передаточно-множительный механизм, индикаторная часть, механизм установки начального давления, герметический корпус. Внешний вид и кинематические схемы высотомеров ВД-17, ВД-20 показаны на рис. 4.3-4.4. В качестве чувствительного элемента в приборе применен анероидный блок, состоящий из двух коробок 1 [9].
|
|
|
| Рис. 4.3. Внешний вид высотомера ВД-17 | Рис. 4.1 Кинематическая схема высотомера ВД-17 1- анероидные коробки; 2,3- центры; 4 - биметаллический валик 5, 6 – штифты 7, 8- тяги; 9-переходная ось; 10-зубчатый сектор; 11 – биметаллическая пластинка; 12, 13 - стойки; 14 - пружинный противовес; 15 - пружина; 16 – регулировочный винт; 17-25 - шестерни; 26 - волосок; 27, 28 - оси; 29, 30 - стрелки; 31 - коробок; 32 - шкала барометрического давления; 33 - головка кремальеры. |
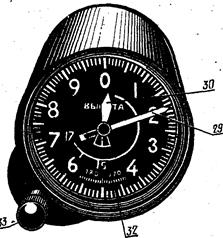
При изменении высоты полета изменяется давление воздуха, окружающего самолет. Изменение давления через штуцер в корпусе передается во внутреннюю полость прибора, в результате чего происходит деформация коробок блока, вызывающая перемещение верхнего центра 2. Это перемещение посредством тяги 7 и шестерен передается на большую стрелку прибора 29 и при помощи шестеренчатого перебора - на малую стрелку 30.
|
|
| Рис. 4.4. Кинематическая схема высотомера ВД-20 |
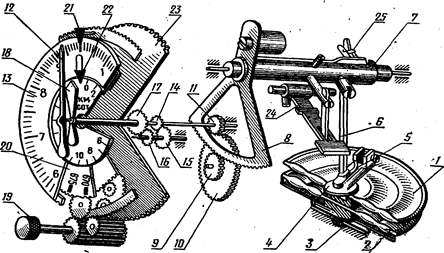
1,2- блок анероидных коробок; 3 - неподвижный центр блока коробок; 4 - подвижный центр блока коробок; 5, 25 - температурные компенсаторы; 6 - тяга; 7 - промежуточный валик; 8 - зубчатый сектор; 9, 11, 14 - трибки; 10, 15, 16, 17-шестерни; 12-большая стрелка; 13 - внешняя шкала; 18 - малая стрелка; 19-кремальера; 20-шкала давлений; 21, 22 - индексы; 23 - подвижное основание; 24 - пружинный балансир оси 9, сектора 10
Большая стрелка прибора показывает по шкале высоту полета самолета в метрах. Эта стрелка делает полный оборот при изменении высоты на 1000 м. Малая стрелка прибора показывает высоту полета в километрах. Она делает один полный оборот при изменении высоты на 10000м. При помощи кремальеры 33 в прибор можно вводить поправки на изменение барометрического давления. Погрешность прибора у земли ±20 м, а на высоте 17000м±300м.
Рассмотрим основные источники погрешностей барометрических высотомеров с металлическими чувствительными элементами, сравнивая их с высотомерами на базе кремниевых кристаллов. Барометрическим высотомерам с металлическими чувствительными элементами присущи инструментальные, аэродинамические и методические ошибки [9].
Инструментальные ошибки возникают вследствие несовершенства изготовления механизма высотомера, износа деталей и изменения упругих свойств чувствительного элемента. Они определяются в лабораторных условиях. По результатам лабораторной проверки составляются таблицы, в которых указываются значения инструментальных поправок для различных высот полета. В тоже время главные преимущества кремниевых датчиков по сравнению с аналогичными приборами на основе металлических мембран - это долговременная стабильность параметров. Однородный кристалл кремния является идеальным материалом для приема усилий благодаря своей сверх эластичности, не меняющейся даже при экстремальных нагрузках. Ему не свойственно по сравнению со стальными диафрагмами изменение формы после снятия усилия. Он либо сохраняет свою точную первоначальную геометрию, не зависимо от величины приложенного усилия, либо разрушается в случае предельно допустимой деформации [12].
Аэродинамические ошибки являются результатом неточного измерения атмосферного давления на высоте полета из-за искажения воздушного потока в месте его приема, особенно при полете на больших скоростях. Эти ошибки зависят от скорости полета, типа приемника воздушного давления и места его расположения. Этот вид ошибок не зависит от типа чувствительных элементов барометрического высотомера и ликвидируется различными конструкторскими решениями.
Методические ошибки обусловлены несовпадением фактического состояния атмосферы с данными, положенными в основу расчета шкалы высотомера: давление воздуха = 760 мм рт ст., температура = 15° С, температурный вертикальный градиент = 6,5° на 1000 м высоты.
Методические ошибки включают три составляющие. Первая – барометрическая ошибка. В полете барометрический высотомер измеряет высоту относительно того, уровня, давление которого установлено на шкале. Он не учитывает изменение давления по маршруту. Обычно атмосферное давление в различных точках земной поверхности в один и тот же момент неодинаковое. Поэтому истинная высота будет изменяться в зависимости от распределения атмосферного давления у Земли. При падении атмосферного давления по маршруту истинная высота будет увеличиваться, при повышении давления - уменьшаться, т. е. возникает барометрическая ошибка, обусловленная непостоянством атмосферного давления у Земли. Ошибка Нбар учитывается следующим образом: перед вылетом - установкой стрелок высотомера на нуль; перед посадкой - установкой на высотомере давления аэродрома посадки; при расчете высот - путем учета поправки на изменение атмосферного давления. В случае кремниевых датчиков давления установка на ноль и корректировка происходит автоматически.
Причиной второй составляющей методической ошибки Нтемп является несоответствие фактического распределения температуры воздуха с высотой стандартным значениям, принятым в расчете механизма высотомера. Температурная ошибка особенно опасна при полетах на малых высотах и в горных районах в холодное время года. В практике считают, что для малых высот каждые 3° отклонения фактической температуры воздуха от стандартной вызывают ошибку, равную 1% измеряемой высоты [9]. Обычно методическая температурная поправка учитывается с помощью навигационной линейки НЛ-10М или навигационного расчетчика НРК-2. Чувствительность, смещение (выходное напряжение при нулевом давлении на диафрагму) и диапазон выходных напряжений микромеханических датчиков давления сильно зависят от температуры, что привело к разработке термокомпенсированных приборов, причем термокомпенсация реализуется как приборно, так и алгоритмически. Так фирма Motorola для температурной компенсации использует напыленные вакуумным способом пленочные резисторы, которые подстраивают лазером для получения необходимых характеристик датчика давления. При этом в температурном диапазоне 0 - 80 °C погрешность измерения давления обеспечивается в пределах ±1% и ±2% в температурном диапазоне -50÷+125° С [12].
Третья составляющая - возникает потому, что высотомер в продолжение всего полета указывает высоту не над пролетаемой местностью, а относительно уровня изобарической поверхности, атмосферное давление которого установлено на приборе. Чем разнообразнее рельеф пролетаемой местности, тем больше будут расходиться показания высотомера с истинной высотой.
Другим преимуществом кремниевых сенсоров является более высокая чувствительность. Это параметр почти в сто раз выше, чем у классических тензопреобразователей с металлической диафрагмой, на которую напылен тензорезистивный слой. Третье преимущество - более высокая точность и линейность характеристики преобразования «давление-напряжение». Сцепление пьезорезисторов измерительного моста с кремниевой диафрагмой на молекулярном уровне позволяет исключить погрешности, связанные с передачей деформации.
Решающим же преимуществами полупроводниковых датчиков является компактность, невысокая стоимость (при серийном производстве), высокая надежность и простота эксплуатации.
Итак, электронный высотомер на основе микромеханических датчиков давления (смотри рис. 4.5) по сравнению с высотомерами на основе металлических чувствительных элементов имеет огромное количество преимуществ, в том числе: устойчивость к вибрации и ударам, возможность автоматической установки на ноль, возможность автоматической корректировки, прямой интерфейс с электронной системой навигации [11].
|
|
| Рис. 4.5. Кремниевый датчик давления компании Intersema |

4.3 Датчики давления компании Motorola
Описанные преимущества подтолкнули множество фирм на производство полупроводниковых датчиков: Motorola, Honeywell, Intersema... Датчики отличаются миниатюрными габаритами и малым весом, что чрезвычайно важно при применении в бортовых системах навигации летательных аппаратов.
4.3.1 Классификация датчиков
4.3.1.1 Классификация датчиков по степени интеграции
Рассмотрим подробнее виды, устройство и принцип функционирования датчиков давления на примере продукции компании Motorola. Датчики давления Motorola классифицируются по нескольким признакам. Первым из них является степень интеграции (сложность, функциональный состав).
Согласно этой классификации приборы подразделяются на три группы: некомпенсированные датчики, термокомпенсированные и калиброванные датчики, интегрированные датчики [12].
Так датчики давления серии MPX поставляются как в виде базовых элементов без компенсации, базовых элементов с температурной компенсацией и калибровкой, и со схемой полной нормализации (интегрированные) выходного сигнала (семейство MPX5000), размещенной на этом же кристалле. С тем, чтобы облегчить жизнь разработчикам систем, в которых используются датчики давления, фирма Motorola увеличила уровень интеграции датчиков - кроме встроенной температурной компенсации и калибровки, реализованных в датчиках предшествовавшей серии (серии MPX20000), в серии MPX5000 на кристалле датчика реализован усилитель нормализации сигнала, что позволяет реализовать прямой интерфейс датчика с аналого-цифровым преобразователем микропроцессора.
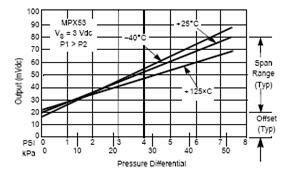
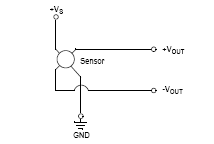
Некомпенсированные - самый простой тип датчиков. Эти базовые приборы представляют собой только корпусированный четырехвыводной чувствительный элемент (смотри рис. 4.6). Чувствительность, смещение (выходное напряжение при нулевом давлении на диафрагму) и диапазон выходных напряжений сильно зависят от температуры. Кроме того, эти параметры имеют технологический разброс от образца к образцу. Простота и низкая стоимость некомпенсированных датчиков приводят к тому, что на плечи разработчиков ложится обеспечение целого ряда функций, обеспечивающих стандартный и стабильный выходной сигнал в широком диапазоне температур, которые уже заложены в более сложных датчиках. От разработчика требуется достаточный опыт как в применении согласующих операционных усилителей, так в разработке программного обеспечения для микроконтроллеров [12].
| ||
| Рис. 4.6. Выходная характеристика и электрическая схема датчика без температурной компенсации |
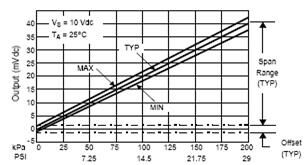
Термокомпенсированные и калиброванные датчики существенно упрощают задачу разработчику (смотри рис. 4.7). Эти приборы включают, кроме чувствительных элементов, встроенные в кристалл тонкопленочные резисторы и термисторы, калиброванные с помощью лазерной подгонки, с тем, чтобы обеспечить относительно стабильный выходной сигнал. Такие параметры, как смещение и диапазон, калибруются при изготовлении.
Опр. Калибровка измерительных приборов заключается в установлении зависимости между показаниями прибора и размером измеряемой (входной) величины. Под калибровкой часто понимают процесс подстройки показаний выходной величины или индикации измерительного инструмента до достижения согласования между эталонной величиной на входе и результатом на выходе (с учётом оговоренной точности). Например, калибровкой медицинского термометра, показывающего в ванне с температурой 36,6С результат на дисплее 36,3С, будет добавление 0,3С. При этом неважно, будет ли эта величина внесена в память прибора или написана на приклеенной к термометру бумаге.
| ||
| Рис. 4.7. Выходная характеристика и электрическая схема термокомпенсированного датчика |
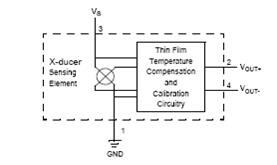
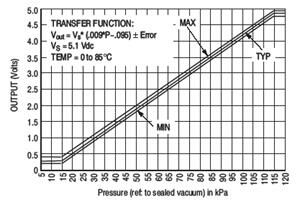
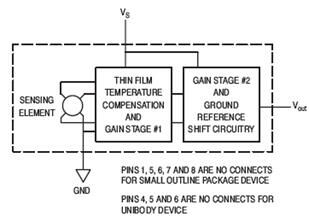
До предела упростить схемотехнику проектируемого прибора позволяют интегрированные датчики (смотри рис. 4.8). Эти датчики дополнительно содержат схему усилителя для увеличения выходного сигнала до стандартной величины в 4.5В. Это позволяет подключить датчик напрямую ко входу АЦП микроконтроллера цифрового высотомера.
| ||
| Рис. 4.8. Выходная характеристика и электрическая схема интегрированного датчика |
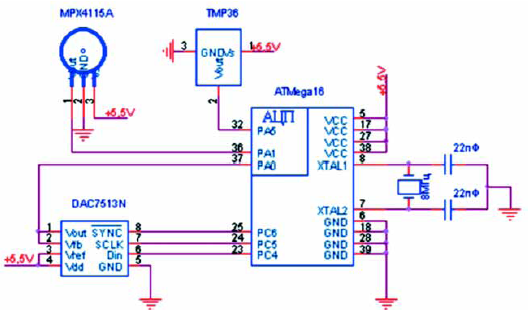
Опишем один из вариантов организации цифрового высотомера. Одна из типовых схем построения цифрового высотомера представлена на рис. 4.9. В основе устройства лежат: датчик МРХ4115А фирмы Motorola, датчик температуры ТМР36 фирмы Analog Devices, 8-бит микроконтроллер АТМеда 16 фирмы Atmel и ЦАП DAC7513N фирмы Texas Instruments. МРХ4115А — это датчик абсолютного давления с диапазоном измерения от 15 до 115 кПа. Датчик имеет внутреннюю схему усиление и выходной сигнал от 0,2 до 4,8 В. Использование датчика со встроенной схемой усиления позволяет избежать проблем с температурной компенсацией, уменьшить габариты устройства и упростить разработку. Для простоты конструкции и уменьшения стоимости изделия оцифровка выходного сигнала датчика осуществляется с помощью встроенного в микроконтроллер 10-разрядного АЦП. Встроенное АЦП является дифференциальным и имеет три уровня программируемого коэффициента усиления. В навигационных системах требование к точности измерения высоты различно, в зависимости от высоты над поверхностью Земли. Так, вблизи поверхности Земли требуется как можно большая точность, а на значительной высоте это требование ослабевает. Наличие у АЦП программируемого коэффициента усиления и дифференциального входа позволяет осуществлять измерение с различной точностью на разных высотах [11].
|
|
| Рис. 4.9. Схема цифрового высотомера |
4.3.1.2 Классификация датчиков по типу измеряемого давления
Вторым классификационным признаком является тип измеряемого давления. Датчик всегда измеряет разницу между двумя давлениями, при этом одно из которых, как правило, является опорным, а другое, измеряемое, подводится при помощи порта. Оно подается обычно с внешней стороны диафрагмы датчика давления со стороны чувствительного элемента (смотри рис. 4.10). В зависимости от давления с обратной (внутренней) стороны диафрагмы датчики подразделяются на дифференциальные, относительные и абсолютные.
Дифференциальные типы датчиков используются, когда необходимо измерить разницу между двумя давлениями. Дифференциальное давление, такое как падение давления в регуляторе тяги или на фильтре в воздушном канале, измеряется подачей давления с противоположных сторон чувствительного элемента датчика. Относительный датчик - это разновидность дифференциального, с той лишь разницей, что его внутренняя сторона диафрагмы открыта в атмосферу, то есть в качестве опорного давления служит атмосферное давление.
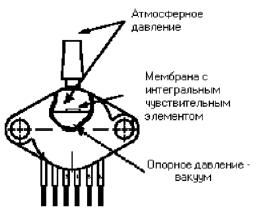
В абсолютном датчике открыта только одна сторона. На обратной стороне, внутри кристалла создается откачанный вакуумный промежуток, давление в котором является опорным.
Первым вопросом при проектировании высотомера становится выбор типа датчика измерения давления. При максимальной высоте, на которой действует формула (11000 м), атмосферное давление составит около 23.5 кПа (176.25 мм рт. ст.), на глубине же в 1000 м оно составит около 112 кПа (840 мм рт. ст.), при атмосферном давлении на нулевом уровне — равном 100 кПа (750 мм рт. ст.).
Разрешающая способность полупроводниковых датчиков давления не отмечена в спецификациях фирм-производителей (Motorola, Honeywell). Считается, что ограничение на разрешающую способность накладывается только электроникой. Рассмотрим возможность применения датчиков дифференциального давления для измерения высоты.
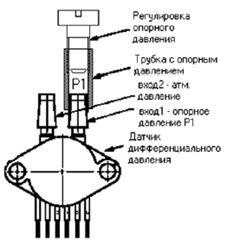
На рис. 3 приведена измерительная схема на основе датчика дифференциального давления. В одном из входов датчика создается опорное давление, относительно которого будут производиться измерения. Такое устройство позволяет производить механическую регулировку нуля и учитывать только необходимый диапазон измерения. Но существует недостаток, из-за которого применение такой схемы в бортовых системах становится невозможным. Опорное давление в замкнутом объеме трубки и входе датчика очень сильно изменяется с температурой. Изменение эти настолько сильные и быстрые, что полезная зависимость изменения давления становится неразличимой. Правильным является использование датчиков абсолютного давления (смотри рис. 4.10). В таких датчиках в качестве опорного давления используется нулевое давление или вакуум, а его свойства не изменяются с температурой.
| ||
| Рис. 4.10. Варианты корпусов для датчиков дифференциального и абсолютного давлений |
4.3.1.2 Классификация датчиков по конструкции корпуса, тенденции развития датчиков Motorola
Датчики также классифицируются и по конструктивному исполнению. Большинство датчиков изготавливаются в базовом корпусе (рис. 4.12). Этот корпус не имеет крепежных деталей, и, если разработчик хочет закрепить его на плате или шасси, то он должен либо самостоятельно изготовить предохранительный корпус с элементами механического крепления датчика и трубок (портов подвода среды, в которой измеряется давление), либо использовать датчики, упакованные уже в стандартные предохранительные корпуса с одним или двумя портами подвода давления (смотри рис. 4.11).
|
|
| Рис. 4.11. Многообразие корпусов для датчиков давления |
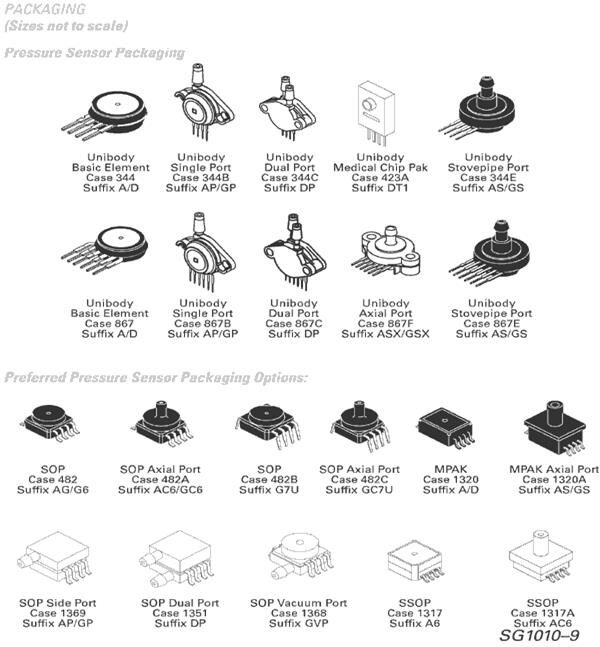
Эти порты предназначены для присоединения трубок с внешним диаметром 1/8 дюйма, наконечники выполнены из высокотемпературного пластика, который выдерживает температуру в пределах -50...+150°С. Датчики давления серии МРХ предназначены для установки на печатную плату (стандартный шаг между выводами 2.54мм) или для присоединения к разъему. Наряду с базовыми типами корпусов Motorola выпускает датчики в миниатюрных корпусах для SMD монтажа (SOP, SSOP, MPAK, MEDICAL CHIP PAK) 2,54 и 1,27мм.
Что касается развития производственной линейки датчиков давления, то у Motorola прослеживается тенденция в дальнейшей миниатюризации. Совсем недавно появилось новое семейство сверх-малопотребляющих миниатюрных датчиков серии MPXY8020, которые имеют цифровой 8-битный выход и объединяют в себе функции измерения давления и температуры. Для распределенных систем сбора данных, автомобильной техники, робототехники, медицины и других областей Motorola анонсировала (в самое ближайшее время будут доступны инженерные образцы) уникальные датчики, с возможностью объединения в сеть по радиоканалу с поддержкой технологии ZigBee. ZigBee это очень гибкая технология беспроводной связи (диапазон рабочих частот 2.4ГГц), базирующаяся на недавно принятом стандарте (протоколе) передачи данных IEEE 802.15.4.
4.3.2 Устройство и принцип работы датчика давления
4.3.2.1 Базовый корпус, кристалл
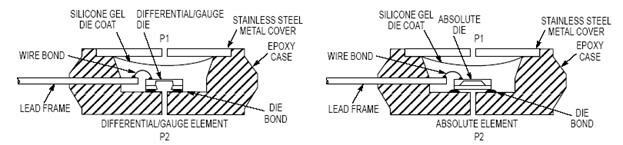
Рассмотрим подробнее устройство и принцип работы датчиков давления. Кремниевые датчики давления фирмы Motorola изготавливают двух видов: дифференциальные и абсолютные. Базовые корпуса датчиков абсолютного и дифференциального давлений идентичны (смотри рис. 4.12).
|
|
| Рис. 4.12. Поперечные сечения базовых корпусов датчика абсолютного давления и дифференциального/относительного давления |
Рассмотрим устройство базового корпуса подробнее (смотри рис. 4.13).
|
|
| Рис. 4.13. Поперечные сечения базового корпуса датчика дифференциального давления |
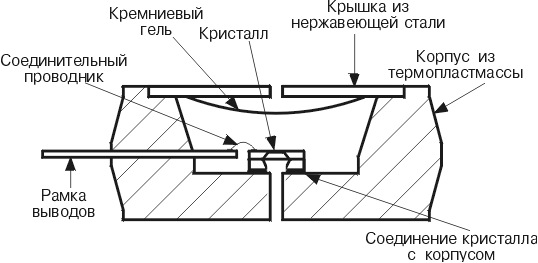
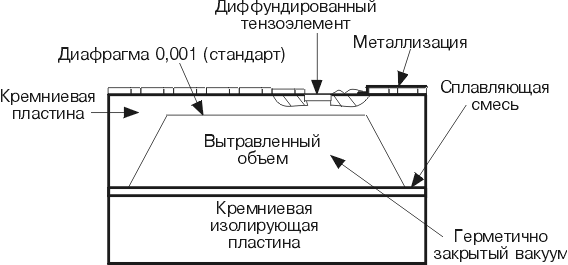
Основным элементом датчика давления является кристалл, на котором расположена кремниевая диафрагма с чувствительным элементом - имплантированной тензорезистивной цепочкой - X-ducer. Разница между кристаллами датчиков дифференциального и абсолютного давления заключается в том, что у последнего нет отверстия в нижней - герметизирующей кремниевой пластине и полость, сформированная углублением, вытравленным в верхней пластине, и нижней пластиной содержит вакуум – опорное давление (смотри рис. 4.14). Кремниевый гель изолирует поверхность кристалла и соединительные проводники от повреждения твердыми частицами, которые могут оказаться в среде, передающей давление на диафрагму,
|
|
| Рис. 4.14. Кристалл датчика абсолютного давления |
Кристалл датчика давления серии МРХ расположен на кремниевом кристаллодержателе, который приклеен к корпусу датчика. Внутренняя полость заполнена кремнийорганической жидкостью - компаундом. Пластмассовый корпус закрыт крышкой из нержавеющей стали. В корпус впресованы внешние выводы, которые с помощью золотых проволочек соединяются с рамкой выводов 1-4 кристалла датчика давления.
4.3.2.2 Чувствительный элемент датчика X-ducer
4.3.2.2.1 Конструкция и физическая основа функционирования
Функционирование чувствительного элемента микромеханического датчика давления основывается на тензорезистивном эффекте.
Определение: Тензорезистивный эффект - изменение удельного электросопротивления твёрдого проводника (металла, полупроводника) в результате его деформации. Величина относительного изменения компонент тензора электросопротивления  связана с тензором деформации
связана с тензором деформации  через тензор четвёртого ранга
через тензор четвёртого ранга  :
:  .
.
Определение: На практике пользуются понятием тензочувствительности  , где
, где  — относительное изменение длины
— относительное изменение длины  образца под действием приложенной нагрузки в определённом направлении,
образца под действием приложенной нагрузки в определённом направлении,  — относительное изменение удельного электросопротивления вдоль этого направления. В металлах
— относительное изменение удельного электросопротивления вдоль этого направления. В металлах  порядка единицы, в полупроводниках (например, в Ge и Si) в десятки и сотни раз больше.
порядка единицы, в полупроводниках (например, в Ge и Si) в десятки и сотни раз больше.
Тензорезистивный эффект связан с изменением межатомных расстояний при деформации, что влечёт за собой изменение структуры энергетических зон кристалла. Последнее обусловливает изменение концентрации носителей тока (электронов проводимости, дырок), их эффективной массы, перераспределение их между энергетическими максимумами в зоне проводимости и минимумами в валентной зоне. Кроме того, деформация влияет на процессы рассеяния носителей (появление новых дефектов, изменение фононного спектра). Тензорезистивный эффект применяется в тензодатчиках сопротивлений, служащих для измерения деформаций.
Почти все фирмы, производящие датчики давления строят первичный преобразователь «давление-напряжение» по традиционной схеме моста Уинстона, имеющей несколько недостатков:
- схема имеет 4 подбираемых резистора;
- необходима их подстройка ucer;
- необходимы сложные схемы температурной компенсации.
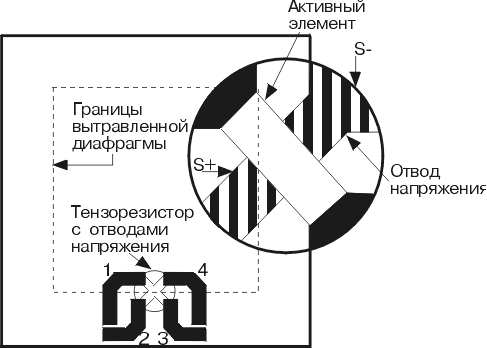
Эти недостатки сподвигнули фирму Motorola вести активный поиск альтернативного решения, который и увенчался разработкой принципиально нового решения, которое впоследствии было запатентовано, и носит торговую марку X-ducer. Элемент X-ducer (смотри рис. 4.15), названный так из-за х-образной формы преобразователя, представляет собой кремниевую диафрагму, на которую методом ионной имплантации внедрена х-образная тензорезистивная структура. Элемент развивает на выходе напряжение, прямо пропорциональное приложенному давлению и имеет очень высокие показатели линейности, повторяемости, воспроизводимости, чувствительности и отношения сигнал/шум. Одна пара выводов служит для подачи напряжения питания, а со второй снимается разность потенциалов, линейно за висящая от напряжения питания (пропорциональный выход) и приложенного давления (усилия).
Датчик реализован с использованием технологии MEMS, что позволило получить точный, качественный аналоговый выходной сигнал пропорциональный прилагаемому давлению.
4.3.2.2.2 Принцип работы
Датчик работает таким образом: ток возбуждения протекает по резистору (отводы 1 и 3), а подаваемое к диафрагме давление, воздействуя на диафрагму, изгибает резистор. Изгиб приводит к возникновению в резисторе поперечного электрического поля, которое проявляется как напряжение на отводах 2 и 4, соединенных со средней точкой резистора (смотри рис. 4.15). Выходной сигнал изменяется пропорционально прилагаемому давлению.
|
| Выводы: 2. +Vout 3.Vs |
| Рис. 4.15. Чувствительный элемент X-duсer |
Тензодатчик является интегральной частью диафрагмы и, следовательно, его температурный коэффициент не отличается от температурного коэффициента диафрагмы. Выходные параметры самого тензодатчика все же зависят от температуры и для обеспечения расширенного диапазона температур необходима температурная компенсация. Для диапазона температур от 0 до 85°C достаточно простой резистивной цепочки, реализованной на том же кристалле, но для более широкого диапазона температур, например от -40 до 125°C, потребуется и более сложная схема компенсации. Такая дополнительная компенсация реализуется внешними схемами.
Использование одного чувствительного элемента исключает необходимость точного согласования четырех, чувствительных и к давлению и к температуре, резисторов, составляющих мост Уинстона. Кроме того, существенно упрощаются дополнительные схемы, необходимые для калибровки и температурной компенсации. Начальное смещение зависит, в основном, от степени выравнивания отводящих проводников, снимающих напряжение. Это выравнивание выполняется в одном литографическом процессе, обеспечивающем простое их согласование, а использование только положительного напряжения, упрощают схему сведения смещения к нулю.
4.3.3 Основные характеристики кремниевых датчиков
Основные характеристики датчиков давления:
- Размах выходного напряжения (Full Scale Span - Vfss) определяется как алгебраическая разница между выходным напряжением при максимальном сертифицированном рабочем давлении и напряжением при минимальном сертифицированном рабочем давлении.
- Начальное смещение (Voff) определено как выходное напряжение при действии на датчик минимального сертифицированного давления.
- Точность (суммарная ошибка) складывается из:
| Нелинейности | Отклонение выходного напряжения от линейной зависимости P/ Vout |
| Гистерезиса температуры | Разница выходных напряжений при изменении температуры от минимума к максимуму, или наоборот, при приложенном нулевом дифференциальном давлении |
| Гистерезиса давления | Разница выходных напряжений при изменении сертифицированного давления от минимума к максимуму, или наоборот, при 25°C |
| Стабильности смещения | Разница выходных напряжений после 1000 циклов изменения температуры от -40 до 125°C и приложения 1.5 миллиона минимальных сертифицированных циклов давления |
| Температурной ошибки | Лекция "Взаимоотношения РФ и субъектов РФ: разграничение предметов ведения и полномочий" также может быть Вам полезна. Разница выходных напряжений в диапазоне температур от 0 до 85°C относительно температуры 25°C |
| Ошибки смещения | Разница выходных напряжений, при приложении минимального сертифицированного давления в диапазоне температур от 0 до 85°C относительно температуры 25°C |
| Отклонения от номинала | Отклонения от номинальных значений смещения или размаха выходного напряжения в процентах от Vfss при 25°С |
- Время отклика определяется как время нарастания выходного напряжения от 10% до 90% его конечного значения, определяемого изменением давления.
Отметим, что внешнее давление, превышающее указанное в инструкции, может привести к утечкам тока с выводов на корпус.


















