


Принцип определения смещения в соединении
18. Принцип определения смещения в соединении
Согласно этому принципу поверхности, ограничивающие смещение присоединяемой детали относительно базовой, следует располагать перпендикулярно к направлению ограничиваемого смещения. В этом случае более точно обеспечивается расположение рабочих элементов соединения относительно базовых, более благоприятным будет силовой режим в соединении (связанный с деформациями деталей, их износом), технологичней будут детали.
На рис. 2.24 а, б изображены два варианта ограничения смещения
штока 1 вдоль оси Y деталью 2. В первом варианте поверхность детали 2, ограничивающая смещение штока, расположена перпендикулярно к оси Y, а во втором – под углом -α к оси Y.
В результате для первого варианта погрешность расположения штока вдоль оси Y из-за погрешности  (например, шероховатости) детали 2 будет равна самой погрешности:
(например, шероховатости) детали 2 будет равна самой погрешности:  ; а во втором варианте она будет больше:
; а во втором варианте она будет больше:  . Реакция R со стороны детали 2 на замыкающую силу Θ в первом варианте равна (без учета сил трения) самой силе:
. Реакция R со стороны детали 2 на замыкающую силу Θ в первом варианте равна (без учета сил трения) самой силе:  ; а во втором варианте она больше и равна
; а во втором варианте она больше и равна  (т.е. больше будет износ деталей). Кроме этого, появляется составляющая сила
(т.е. больше будет износ деталей). Кроме этого, появляется составляющая сила  , которая может привести к изгибу и повороту (относительно оси Х) штока в зазоре направляющих.
, которая может привести к изгибу и повороту (относительно оси Х) штока в зазоре направляющих.
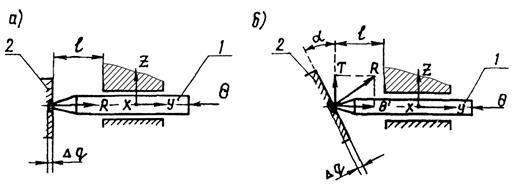
Рис. 2.24. Схемы к расчету влияния расположения базирующей поверхности
При изготовлении, в первом варианте, необходимо обеспечить
параметр l, в то время как во втором случае обеспечиваются параметры  и
и  .
.
Таким образом, на этом элементарном примере можно убедиться в том, что выполнение принципа ограничения смещения деталей в соединениях позволяет повысить точность, надежность и технологичность конструкции.
Рекомендуемые материалы
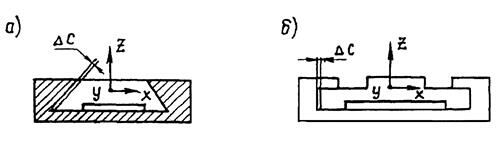
Рис. 2.25. Погрешность при разных типах направляющих
Следовательно, цилиндрические направляющие вращательного движения предпочтительней конических (см. рис. 2.21); направляющие поступательного движения Т-образного типа лучше направляющих типа “ласточкин хвост”
(рис. 2.25, а, б). Точность кулачкового механизма 1 с меньшим углом
давления ( ) будет выше, чем у механизма 2 с большим углом давления (
) будет выше, чем у механизма 2 с большим углом давления ( ) (рис.2.26); погрешность передачи движения винтовым механизмом с остроугольной резьбой больше, чем при трапециевидной резьбе и ленточной (рис. 2.27, а, б, в), либо, когда винт выполнен с трапециевидной резьбой, а гайка с прямоугольной (ленточной) (рис. 2.27, г).
) (рис.2.26); погрешность передачи движения винтовым механизмом с остроугольной резьбой больше, чем при трапециевидной резьбе и ленточной (рис. 2.27, а, б, в), либо, когда винт выполнен с трапециевидной резьбой, а гайка с прямоугольной (ленточной) (рис. 2.27, г).
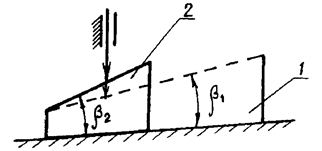
Рис. 2.26. Влияние угла кулачкового механизма на точность
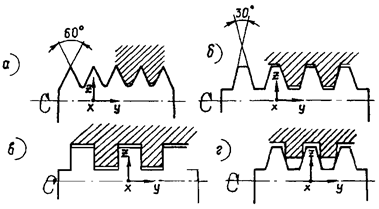
Рис. 2.27. Влияние типа резьбы на точность соединения
На рис. 2.29, а изображена часть конструкции объектива, воздушный промежуток d между линзами которого выдерживается с помощью промежуточного кольца размером l. Из-за нарушения принципа ограничения смещений на погрешность воздушного промежутка ( ) будет влиять не только погрешность размера l кольца (
) будет влиять не только погрешность размера l кольца ( ), но и погрешность диаметров кольца ØD1 и ØD2.
), но и погрешность диаметров кольца ØD1 и ØD2.
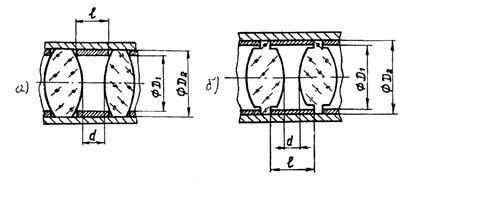
Рис. 2.28. Нарушение принципа ограничения смещения
Лекция "11 Логические функции и микросхемы" также может быть Вам полезна.
Например,  ,
,
где  - радиусы сферических поверхностей линз.
- радиусы сферических поверхностей линз.
Кроме этого, данное соединение может быть критично к изменениям температуры при различных коэффициентах линейного расширения материалов линз и кольца, приводящих к разности изменений соответствующих диаметров кольца и линз, обуславливающих появление деформаций и децентрировок оптических компонентов.
Устранение указанных недостатков достигается в некоторых конструкциях путем выполнения линз с так называемым П-образным буртиком (рис. 2.28, б), что позволяет выполнить принцип ограничения смещений.
 Нарушение рассматриваемого принципа приводит, например, к тому, что при фиксации положения подвижной каретки 1, несущей проекционную систему универсального измерительного микроскопа УИМ-23, винтом 2 происходит значительное ее смещение вдоль оси Х (рис. 2.29). Более правильно для направляющих типа “ласточкин хвост” осуществлять фиксацию в направлении оси Y, для которого принцип ограничения смещений выполняется.
Нарушение рассматриваемого принципа приводит, например, к тому, что при фиксации положения подвижной каретки 1, несущей проекционную систему универсального измерительного микроскопа УИМ-23, винтом 2 происходит значительное ее смещение вдоль оси Х (рис. 2.29). Более правильно для направляющих типа “ласточкин хвост” осуществлять фиксацию в направлении оси Y, для которого принцип ограничения смещений выполняется.
Рис. 2.29. Неверная фиксация направляющих типа «ласточкин хвост»
















