
Основы базирования соединения при сборке
13. Основы базирования соединения при сборке
Выше указывалось, что основную массу соединений составляют соединения базирующие: неподвижные в несущих системах и подвижные в базирующих кинематических парах. Рассмотрим методы и принципы базирования деталей, выполняемого при конструировании соединений.
Базированием называют придание материальным телам определенного и строго фиксированного положения в пространстве (ГОСТ 21495-76). Применительно к конструированию соединений деталей под базированием будем понимать придание определенного заданного чертежом положения присоединяемой детали относительно детали базовой.
Модель процесса конструирования базирующих соединений следующая:
формулируется задача, которую нужно решить (например, требуется осуществить вращательное или поступательное движение или разработать неподвижную несущую систему и т.п.);
определяется тип базируемой детали (призма, цилиндр и т.д.);
выявляются виды и число лишних степеней свободы базируемой детали;
устанавливаются ограничения (по исходным данным, условиям компоновки конструкции в целом и т.д.);
выбираются схема базирования и виды контактных пар.
Рекомендуемые материалы
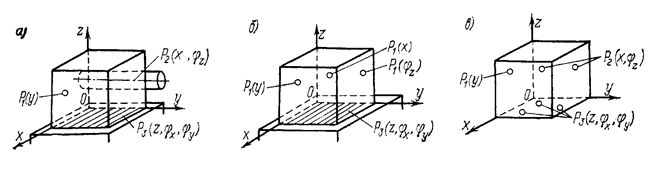
Рис. 2.6. Исходные схемы базирования призматических тел со связями: а – Р3, Р2 и Р1, б – Р3 и Р1, в - Р1.
Схема базирования показывает сочетание контактных пар и их взаимное расположение, необходимые для ограничения лишних степеней свободы у детали данного типа. Составление конкретных схем базирования основано на выборе оптимального сочетания элементарных контактных пар в соответствии с числом ограничиваемых степеней свободы [21]. Условиями оптимизации являются показатели качества, указанные в п. 2.2. Существуют исходные (обобщенные) схемы базирования для типовых форм базируемых тел; рассмотрим эти схемы.
На рис. 2.6 изображены обобщенные схемы базирования призматического тела, составленные с учетом свойства эквивалентности контактных пар [21]. Из рисунка видно, что для призматического тела возможно принудительное ограничение всех шести степеней свободы несколькими способами. Так, нетрудно придать ему поступательное движение, убрав, например, контактную пару, препятствующую смещению по оси Oy, но невозможно осуществить неограниченное вращательное движение. Выбор конкретного варианта схемы зависит от силового и динамического режимов работы соединения; наиболее употребительны схемы на рис. 2.6, а, б, наивысшую геометрическую определенность обеспечивает схема на рис. 2.6, в.
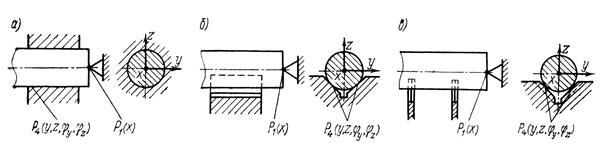
Рис. 2.7. Исходные схемы базирования цилиндрических тел со связями: а – Р4 и Р1; б – Р4 и Р1; в – Р4 и Р1.
На рис. 2.7 приведены три исходные схемы базирования тела цилиндрической формы с тремя видами контакта (по поверхности, линиям и точкам), эквивалентные по числу отнимаемых степеней свободы (из них наиболее употребительны первые две). Из рисунка видно, что у цилиндра можно принудительно ограничить лишь пять степеней свободы. С помощью элементарных контактных пар нельзя устранить поворот цилиндра вокруг его оси. Для этого используют шпонку или силовую связь. Этим объясняется преимущественное применение цилиндрических тел для осуществления вращательного движения.
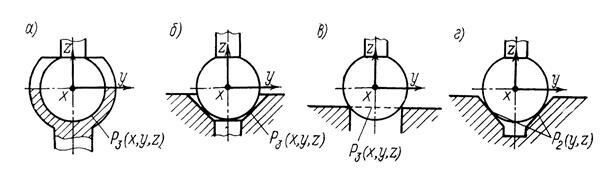
Рис. 2.8. Исходные схемы базирования тел шаровой формы: а – с одной связью Р3; б – по конической поверхности (связь Р3 ); в – по кромке цилиндрического отверстия (связь Р3 ); г – по призматической канавке (связь Р2 ).
На рис. 2.8 приведены схемы базирования тела шаровой формы также с тремя эквивалентными видами контакта: по поверхности, кольцевой линии и трем точкам. У шара можно отнять с помощью элементарных контактных пар только три степени свободы (смещения); для ограничения трех других степеней свободы (поворотов) необходимы дополнительные конструктивные средства. Отмеченное свойство тел шаровой формы обусловило широкое их применение в устройствах юстировки и настройки, когда требуется самоустановка (или регулировка) по трем угловым координатам.
Разработка конкретных схем базирования с учетом заданных форм деталей и чисел отнимаемых степеней свободы производится на основе обобщенных схем. При выборе определенного сочетания конкретных пар всегда широко используется свойство их эквивалентности (п. 2.5).
14. Геометрическая неопределенность контактных пар
При конструктивной реализации конкретных схем базирования встречаются ограничения, которые принуждают учитывать отклонения от исходных схем базирования и допускать ряд условностей в определении классов конкретных пар. Рассмотрим ограничения, связанные с геометрической неопределенностью типовых контактных пар.
Реальные контуры и размеры площадок контакта в сопряжениях контактных пар отличаются от номинальных контуров и размеров вследствие погрешностей формы сопрягаемых поверхностей деталей. Контакт по точке в действительности из-за погрешностей микроформы (шероховатости) сопрягаемых поверхностей представляют собой малого размера ln пятно неопределенной конфигурации, а контакт по линии имеет некоторую ширину и, вследствие погрешностей макроформы и волнистости, имеет разрывы по длине и обращается в ряд вытянутых пятен неопределенной длины; контакт поверхностей распадается на пятна, форма, размеры и положение которых неопределенны (рис. 2.9). Представление о контакте в реальных сопряжениях можно получить при контроле качества контакта с помощью красящих паст.
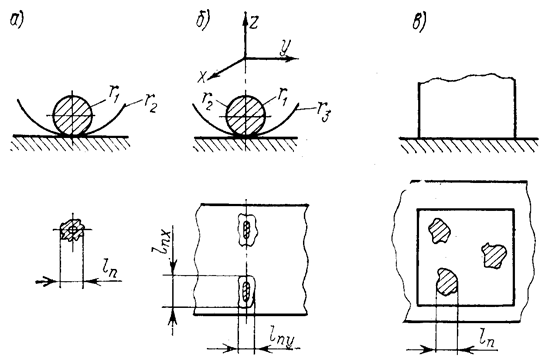
Рис. 2.9. Геометрическая неопределенность контакта реальных поверхностей при контакте; а – по точке; б – по линии; в – по плоскости.
Таким образом, все виды контакта имеют геометрическую неопределенность в сопряжении контактной пары, наибольшую для контакта поверхностей и наименьшую для контакта по точкам. Эта неопределенность снижает несущую способность сопряжения, а также точность соединения. Если, например, длина ползуна в направляющих (рис. 2.10) определена из условия ограничения поворотов его при движении вокруг оси Oy по формуле  , где
, где  - погрешность, вызывающая поворот ползуна;
- погрешность, вызывающая поворот ползуна;  - его длина, то вследствие неопределенности положения пятен контакта действительная ошибка положения ползуна
- его длина, то вследствие неопределенности положения пятен контакта действительная ошибка положения ползуна  будет в
будет в  раз превышать расчетную.
раз превышать расчетную.
Очевидно, для несущей способности всегда будет более опасной неопределенность размеров пятен, а для точности – неопределенность их положения. Таким образом, наиболее благоприятным для точности соединений является контакт по точкам и наименее благоприятным – контакт по поверхностям. С этим связано представление о методах конструирования: кинематическом – с контактом по точкам, полукинематическом – с контактом по линиям, машиностроительном – с контактом по поверхностям [14, 28]. Предпочтительны для точного приборостроения первых два метода, однако использование их на практике ограничивается лишь малонагруженными соединениями лабораторных приборов при отсутствии динамического режима; более широко в точном приборостроении применяются контактные пары с контактом по поверхностям.
Рекомендуем посмотреть лекцию "Другие аспекты гонки вооружений".
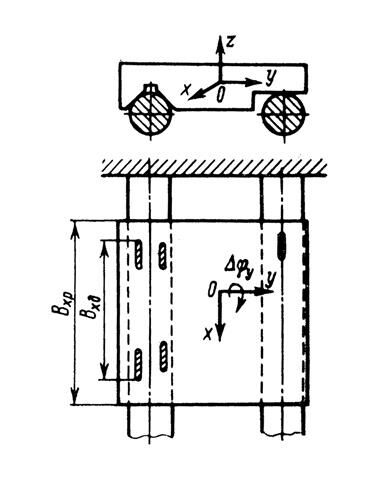
Рис. 2.10. Геометрическая неопределенность контакта в цилиндрических направляющих.
Размеры естественно образуемых пятен зависят от качества сопрягаемых поверхностей. Таким образом, ослабление вредного влияния геометрической неопределенности контактных пар связано с ужесточением требований (и с повышением стоимости соответственно) к качеству поверхностей по всем показателям.
Для повышения геометрической неопределенности положения пятен контакта применяется “управление” их положением с помощью системы выборок (рис. 2.11) на сопрягаемых поверхностях деталей. Размеры выступов ln делают равными размерам пятен контакта, чтобы в пределах выступа не было разрыва контактирующих поверхностей; эти размеры в то же время должны соответствовать силовому режиму прибора и обеспечивать требуемую несущую способность сопряжения [6, 30]. Вопрос о том, где именно следует делать выборки – на базовой или базируемой детали, - решается на основе общих соображений технологичности изготовления деталей.
Рис. 2.11. Повышение геометрической определенности контакта с помощью конструктивных выборок: а – во вращательной цилиндрической паре; б – в цилиндрических направляющих.


















