
Структура плоских механизмов
1. Структура плоских механизмов
Механизм называется плоским, если все его звенья движутся параллельно одной плоскости, и траектории всех его точек – плоские кривые. В противном случае механизм пространственный.
1.1 Классификация плоских кинематических пар
Классификация по числу условий связей
Из курса теоретической механики известно, что свободное твердое тело в про- странстве имеет шесть степеней свободы (рис 1.1).  Это три поступательных движения вдоль трёх осей координат и три вращательных движения вокруг этих осей. Можно также сказать, что на свободное твёрдое тело не наложено ни одной связи. Если обозначить число степеней свободы буквой H, а
Это три поступательных движения вдоль трёх осей координат и три вращательных движения вокруг этих осей. Можно также сказать, что на свободное твёрдое тело не наложено ни одной связи. Если обозначить число степеней свободы буквой H, а
число связей буквой S, то можно записать:
Н = 6, S = 0
При переходе из пространственной системы в плоскую твёрдое тело теряет три степени свободы, что означает, что на него наложено три связи. Так что свободное твёрдое тело в плоскости имеет H = 3 и S = 3. Например, тело, находящееся в координатной плоскости XY, может двигаться поступательно вдоль этих осей и вращаться вокруг оси, перпендикулярной плоскости XY (рис 1.2).
В плоской кинематической паре количество ограничений в движении звена, называемых условиями связей, может быть или два, или одно.
Рекомендуемые материалы
 В первом случае общее количество условий связей вместе с тремя потерянными при переходе из пространства в плоскость составляет S = 5. Такая кинематическая пара в соответствии с числом S является парой 5-го класса, а так как в ней может выполняться только одно движение (H = 1), то эта пара называется также одноподвижной кинематической парой. Кинематические пары 5-го класса могут быть вращательными (рис. 1.3) и поступательными (рис. 1.4) в зависимости от характера относительного движения звеньев, реализуемого в ней. Возможные относительные движения звеньев в этих парах на указанных рисунках отмечены стрелками.
В первом случае общее количество условий связей вместе с тремя потерянными при переходе из пространства в плоскость составляет S = 5. Такая кинематическая пара в соответствии с числом S является парой 5-го класса, а так как в ней может выполняться только одно движение (H = 1), то эта пара называется также одноподвижной кинематической парой. Кинематические пары 5-го класса могут быть вращательными (рис. 1.3) и поступательными (рис. 1.4) в зависимости от характера относительного движения звеньев, реализуемого в ней. Возможные относительные движения звеньев в этих парах на указанных рисунках отмечены стрелками.
Во втором случае общее количество условий связей S = 4, и кинематическая пара является парой 4-го класса, а в соответствии с
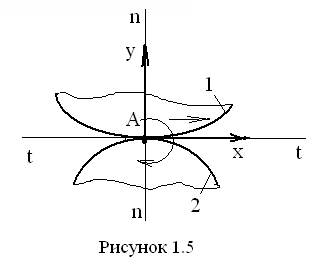

 H = 2 она называется двухподвижной кинематической парой (рис. 1.5). Как видно из этого рисунка, пару 4-го класса в плоскости составляют две кривые 1 и 2, контактирующие друг с другом в точке A. Относительное движение звеньев этой пары возможно в направлении касательной t–t (ось X) и вращение вокруг точки A. Невозможно движение вдоль нормали n–n (ось Y).
H = 2 она называется двухподвижной кинематической парой (рис. 1.5). Как видно из этого рисунка, пару 4-го класса в плоскости составляют две кривые 1 и 2, контактирующие друг с другом в точке A. Относительное движение звеньев этой пары возможно в направлении касательной t–t (ось X) и вращение вокруг точки A. Невозможно движение вдоль нормали n–n (ось Y).
Классификация по характеру касания элементов.
Элемент кинематической пары – это совокупность точек, линий или поверхностей, которыми данное звено входит в касание с другим звеном при образовании кинематической пары. Если касание элементов кинематической пары происходит по линии или в точке, то кинематическая пара высшая (пара 4-го класса), если касание происходит по поверхности, то кинематическая пара низшая (пара 5-го класса).
Механизмы с высшей кинематической парой передают меньшие нагрузки, но имеют малые потери на трение и легко проектируются. Элементы этих пар сложны в изготовлении.
Механизмы с низшими кинематическими парами передают большие нагрузки, имеют большие потери на трение, сложнее синтезируются. Имеют простые формы в виде плоскостей, цилиндрических поверхностей, поэтому более технологичны, т. е. просты в изготовлении.
1.2. Расчет подвижности плоского механизма
Подвижностью механизма (или его числом степеней свободы) называется количество обобщённых (независимых) координат, которое должен иметь механизм для того, чтобы все его звенья имели вполне определённые движения.
Представим себе, что нам необходимо спроектировать механизм из k звеньев. Так как каждое звено, будучи свободным в плоскости, обладает тремя степенями свободы, то получим:
3k – общее количество степеней свободы всех k звеньев.
При образовании кинематической цепи звенья теряют свои степени свободы.
Кинематическая цепь – это ряд звеньев, соединенных между собой кинематическими парами. Если в кинематической цепи
p5 – количество кинематических пар 5-го класса, а каждая такая пара накладывает два условия связи на относительное движение звеньев, поэтому
2p5 – общее количество условий связи, наложенных всеми парами 5-го класса.
Пусть также в кинематической цепи
p4 – количество кинематических пар 4-го класса. Так как каждая пара 4-го класса накладывает одно условие связи, то
1p4 – общее количество условий связи, наложенных на относительное движение звеньев всеми парами 4-го класса.
Если обозначить буквой S общее количество условий связей в кинематической цепи, наложенное парами обоих классов, то
S = 2 p5 + p4 .
Количество степеней свободы H кинематической цепи определится разностью между числами 3k и S:
H = 3k – (2 p5 + p4).
 Механизм – это кинематическая цепь с одним неподвижным звеном, допускающая целесообразные однозначно определенные движения. Поэтому при образовании механизма одно из его звеньев должно быть сделано неподвижным (стойкой), тогда число степеней свободы механизма будет: W = H – 3, или
Механизм – это кинематическая цепь с одним неподвижным звеном, допускающая целесообразные однозначно определенные движения. Поэтому при образовании механизма одно из его звеньев должно быть сделано неподвижным (стойкой), тогда число степеней свободы механизма будет: W = H – 3, или
W = 3(k – 1) – (2 p5 + p4).
Обозначив k – 1 = n (n –количество подвижных звеньев механизма), имеем
W = 3n – (2 p5 + p4).
Эта формула была получена в 1869 году академиком Петербургской Академии наук П.Л.Чебышёвым и носит название формулы Чебышёва.
Фактически W означает количество независимых движений, которые должен иметь данный механизм для получения полной определенности в движениях всех его звеньев. По существу W означает чаще всего количество ведущих звеньев механизма.
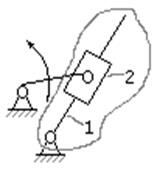
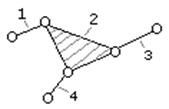
Пример. Механизм поперечно - строгального станка.
Обозначим номера подвижных звеньев данной схемы арабскими цифрами, их количество составит n = 5, римскими цифрами обозначим номера кинематических пар 5-го класса, получив их количество p5 = 7, пары 4-го класса в этом механизме отсутствуют, т. е. p4 = 0. Расчёт по формуле Чебышёва даёт
W = 3·5 – (2·7 + 1∙0) = 1
Следовательно, в этом механизме одна степень свободы, что означает необходимость выбрать одно ведущее звено для его нормального функционирования.
1.3. Структурная классификация механизмов
Принцип структурного образования механизмов по Л.В. Ассуру
Основы теории структуры плоских механизмов были заложены в 1914 г. профессором Л.В. Ассуром. Согласно сформулированному им принципу, любой пло ский механизм (рис. 1.6) может быть образован путем присоединения к исходному механизму, включающему стойку и ведущее звено, кинематических цепей, имеющих нулевую подвижность. Тогда подвижность механизма запишется как сумма
ский механизм (рис. 1.6) может быть образован путем присоединения к исходному механизму, включающему стойку и ведущее звено, кинематических цепей, имеющих нулевую подвижность. Тогда подвижность механизма запишется как сумма
Wмех = Wисх. мех + 0 + 0 + 0 + …
Группы Ассура и их классификация
Кинематическая цепь, которая после присоединения её всеми свободными элементами кинематических пар к стойке получает подвижность, равную нулю, называется группой Асура. Таким образом,
Wгр.Асс. = 0.
В состав группы Асура входят только кинематические пары 5 класса, поэтому, согласно формуле Чебышёва:
Wгр.Асс. = 3n – 2 p5 = 0,
откуда получаем 3n = 2p5 , или p5 = 3/2∙n, как условие существования группы Ас-
сура. Составим таблицу из нескольких сочетаний количества звеньев и кинематических пар в группах Ассура согласно приведённому выше соотношению
| n | 2 | 4 | 6… |
| p5 | 3 | 6 | 9… |
Группы Ассура делятся на классы и порядки.
Класс группы определяется классом наиболее сложного замкнутого контура в составе группы:




II класс III класс IV класс V класс и т. д.
Кинематические пары в контуре III класса, могут быть расположены по одной прямой, не образуя никакой контур, однако считается, что и в этом случае имеется контур III класса. Порядок групп Ассура определяется количеством свободных элементов кинематических пар, которыми группы Ассура присоединяются к дру гим звеньям.
гим звеньям.
Рассмотрим несколько примеров групп Ассура и механизмов с этими группами.
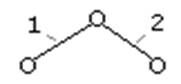


Группа Ассура II класса, 2-го порядка Четырёхшарнирный
1-го вида механизм
Группы II класса делятся также на виды (модификации) в зависимости от количества и расположения в них поступательных и вращательных кинематических
пар. Приведённая выше группа Ассура относится к первому виду. Если в этой группе один из крайних элементов вращательной пары заменить поступательным, то получится группа второго вида. Если заменить среднюю вращательную пару поступательной, то такая группа Ассура получится группой Ассура третьего вида.

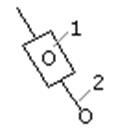
Группа Ассура Кривошипно-ползунный
II класса, 2-го механизм
порядка, 2-го вида
Группа Ассура II класса, Кривошипно-кулисный
2-го порядка, 3-го вида механизм
 n = 4
n = 4
p5 = 6
Группа Ассура III класса, Группа Ассура IV класса
3-го порядка 4-го порядка
Классификация механизмов. Формула строения
В связи с группами Ассура, механизмы также делятся на классы. В составе механизма могут быть несколько групп Ассура разных классов, но механизму присваивается тот класс, который имеет группа Ассура наиболее высокого класса.
Формула строения отражает порядок присоединения групп Ассура друг к другу и к исходному механизму. Приведём здесь для примера вид формулы строения двух механизмов безотносительно к их кинематическим схемам:
При одном ведущем звене При двух ведущих звеньях

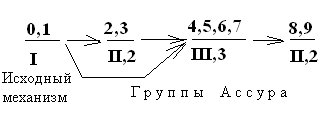
В числителе этих формул проставлены номера звеньев, в знаменателе – класс и порядок групп Ассура. Исходный механизм считается механизмом первого класса. Стрелки указывают направление передачи движения от исходного механизма. Согласно принятой классификации механизмов первая из приведённых формул относится к механизму третьего класса, вторая – к механизму четвёртого класса.
1.4. Замена высших пар в плоских механизмах
При выполнении структурного анализа механизма, если в нём присутствуют высшие пары, требуется их заменить парами низшими. При этом необходимо выполнить следующие условия:
1) Количество связей, наложенных на относительное движение звеньев высшей пары заменяющей кинематической цепью должно остаться неизменным.
2) Мгновенное относительное движение звеньев высшей пары должно сохраниться.
Для выполнения первого условия следует иметь в виду, что одна высшая пара накладывает одно условие связи, поэтому заменяющая кинематическая цепь должна также наложить одно условие связи. Отсюда вытекает равенство:
1 = 2 p5 – 3n,
из которого следует
p5 = (3n + 1)/2,
что позволяет составить следующую табличку возможных сочетаний количества звеньев и пар заменяющей кинематической цепи
| n | 1 | 3 | … |
| p5 | 2 | 5 | … |
Таким образом, в простейшем случае для замены высшей пары требуется одно дополнительное звено и две пары 5-го класса.
Для выполнения второго условия необходимо использовать следующую методику:
 1) В точке контакта элементов высшей пары провести нормаль N–N (Рис. 1.7).
1) В точке контакта элементов высшей пары провести нормаль N–N (Рис. 1.7).
2) На нормали N–N определить положения центров кривизны C1 элемента 1 и C2 элемента 2.
3) В этих центрах поместить низшие пары (5-го класса), а между ними условное заменяющее звено.
Замечания. Если один из элементов высшей пары заканчивается острием, то в этом острие (в точке) располагается одна из заменяющих низших пар.
Рисунок 1.7 Если одно из звеньев высшей пары в зоне контак- та имеет форму прямой линии, то в этом месте пара 5-го класса должна быть поступательной.
1.5. Избыточные (повторяющиеся) связи и местные подвижности в механизмах
Наряду с движениями и условиями связей, которые в механизме влияют на закон преобразования движения, могут существовать такие связи и движения,
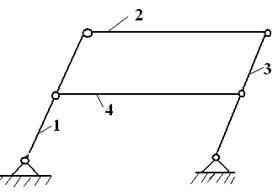
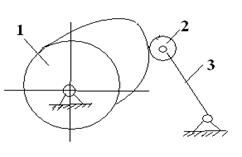
Рисунок 1.8 Рисунок 1.9
которые не влияют на этот закон. Такие связи называются избыточными, а движения – местными подвижностями, или лишними степенями свободы. Одна избыточная связь уменьшает расчётную подвижность на единицу, а одна местная подвижность увеличивает её на единицу. На рис. 1.8 показан механизм шарнирного параллелограмма, у которого противоположные стороны попарно равны (отсюда его название). Расчёт подвижности этого механизма даёт
Wрасч. = 3∙n – 2∙p5 = 3∙4 – 2∙6 = 0,
что означает полное отсутствие движения звеньев, т. е. это не механизм, а ферма.
Фактически же очевидно, что движение звеньев здесь возможно при ведущем, например звене 1, т. е. фактическая подвижность
Wфакт.= 1.
Звенья 2 и 4 выполняют одну и ту же функцию, передавая движение на звено 3, разделяя надвое общий силовой поток, снижая нагрузку, приходящуюся на каждое из них. С точки зрения структуры одно из этих звеньев (например, звено 4) можно считать избыточной связью.
Если подсчитать подвижность кулачкового механизма (рис. 1.9), то окажется, что его Wрасч. = 2, т.е. в этом механизме должно быть два ведущих звена, что невозможно, так как W факт= 1. Местной подвижностью здесь является вращение ролика 2 относительно толкателя 3. Так как это движение не участвует в преобразовании движения в механизме, то оно является лишней степенью свободы. В данном случае это движение необходимо для замены трения скольжения трением качения, что является более выгодным с точки зрения потерь на трение (повышение КПД).
При выполнении структурного анализа механизмов избыточные связи и местные подвижности должны быть исключены.
Вопросы для самопроверки
1. Что такое машина, механизм, в чём их различие?
2. Что называют звеном механизма?
3. Что называют кинематической парой?
4. Как классифицируются плоские кинематические пары?
5. Что называется кинематической цепью?
6. Как рассчитать подвижность плоского механизма?
7. Какой физический смысл имеет подвижность механизма?
8. Что собой представляет избыточная связь?
9. Что такое местная подвижность (лишняя степень свободы)?
Рекомендация для Вас - Божественность духа святого.
10. В чём состоит принцип структурного образования механизмов по Л.В. Ассуру?
11. Что такое исходный механизм?
12. Что такое группа Ассура, как классифицируются группы Ассура?
13. Что называют формулой строения механизма?
14. По каким признакам классифицируют механизмы?
15. Как осуществляется замена высших пар низшими?



















