
Искусственные механические характеристики асинхронного двигателя
4.5 Искусственные механические характеристики асинхронного двигателя
4.5.1 Влияние активного сопротивления в цепи ротора
Включение симметричных активных сопротивлений в цепь ротора широко используется для ограничения пусковых токов и для изменения вида механической характеристики асинхронного двигателя с фазным ротором. Эти двигатели используются в электроприводах подъёмных, транспортных и металлургических установок, а также в приводах вентиляторов, насосов, компрессоров и т.д.
Добавочное сопротивление  в цепи ротора не изменяет критический момент двигателя
в цепи ротора не изменяет критический момент двигателя  , но вызывает увеличение скольжения:
, но вызывает увеличение скольжения:
 . (4.17)
. (4.17)
 Вследствие этого у двигателей с контактными кольцами при введении сопротивления в цепь ротора максимум кривой момента смещается в сторону больших скольжений и механические характеристики будут располагаться ниже естественной (рис. 4.6). Соответствующим выборам можно настолько увеличить крутизну механической характеристики, чтобы критический момент имел место при пуске двигателя или даже был в области противовключения.
Вследствие этого у двигателей с контактными кольцами при введении сопротивления в цепь ротора максимум кривой момента смещается в сторону больших скольжений и механические характеристики будут располагаться ниже естественной (рис. 4.6). Соответствующим выборам можно настолько увеличить крутизну механической характеристики, чтобы критический момент имел место при пуске двигателя или даже был в области противовключения.
 , т.е.
, т.е. 
Приближенно реостатные характеристики в рабочей их части могут быть приняты линейными. Это дает возможность при расчете сопротивлений, включаемых в ротор асинхронного двигателя, пользоваться методами, аналогичными методам, применяемым для двигателя постоянного тока независимого возбуждения.
Обычно требуется определить сопротивление дополнительного резистора  , при включении которого АД будет иметь заданную искусственную механическую характеристику или она будет проходить через заданную точку с координатами
, при включении которого АД будет иметь заданную искусственную механическую характеристику или она будет проходить через заданную точку с координатами  и
и  . При этом естественная механическая характеристика считается известной. Расчёт сопротивления может быть произведён несколькими способами в зависимости от того, как заданна искусственная характеристика.
. При этом естественная механическая характеристика считается известной. Расчёт сопротивления может быть произведён несколькими способами в зависимости от того, как заданна искусственная характеристика.
Рекомендуемые материалы
Если искусственная характеристика заданна полностью и известны значения  ,
,  и
и  , отношение критических скольжений может быть найдено
, отношение критических скольжений может быть найдено
 .
.
Искомое значение  в этом случае может быть найдено
в этом случае может быть найдено
 или
или  (4.18)
(4.18)
В то же время, считая характеристики в рабочей части линейными, можно записать, что
 .
.
Отсюда
 ,
,
 ;
;  (4.19)
(4.19)
Если искусственная характеристика заданна рабочей частью, то можно использовать метод отрезков, рассмотренный ранее для двигателей постоянного тока. Для этого проводится вертикальная линия при  и отмечаются точки пересечения с характеристиками. Считая, что отрезки пропорциональны сопротивлениям в роторе, т.е.
и отмечаются точки пересечения с характеристиками. Считая, что отрезки пропорциональны сопротивлениям в роторе, т.е.
 ,
,  ,
, ,
,  и
и  .
.
Сопротивление искомых резисторов может быть найдено
 и т.д.
и т.д.
Если отсутствуют каталожные данные сопротивления обмотки ротора, оно может быть рассчитано
 ,
,
либо найдено по методу отрезков

где  - номинальное сопротивление асинхронного двигателя, определяемое по формуле
- номинальное сопротивление асинхронного двигателя, определяемое по формуле
Увеличение активного сопротивления вторичного контура улучшает  . Это способствует увеличению активной составляющей тока ротора и, следовательно, момента двигателя. Но значительное увеличение сопротивления
. Это способствует увеличению активной составляющей тока ротора и, следовательно, момента двигателя. Но значительное увеличение сопротивления  может настолько ограничить ток ротора, что его активная составляющая и пусковой момент двигателя будут малы даже при высоком значении .
может настолько ограничить ток ротора, что его активная составляющая и пусковой момент двигателя будут малы даже при высоком значении .
4.5.2 Влияние индуктивного сопротивления в цепи ротора
 Для обеспечения плавного разгона привода при малом числе ступеней ускорения в цепь ротора асинхронного двигателя включают наряду с активным также и индуктивное сопротивления. Применение индуктивных сопротивлений в цепи ротора (рис. 4.7) позволяет ограничить пусковой ток, а также обеспечить большее значение момента двигателя в процессе пуска. При включении реактора последовательно с активным сопротивлением в первый момент пуска двигателя при частоте тока ротора, равной частоте сети, индуктивное сопротивление реактора велико и оно ограничивает пусковой ток. По мере разгона двигателя ротора
Для обеспечения плавного разгона привода при малом числе ступеней ускорения в цепь ротора асинхронного двигателя включают наряду с активным также и индуктивное сопротивления. Применение индуктивных сопротивлений в цепи ротора (рис. 4.7) позволяет ограничить пусковой ток, а также обеспечить большее значение момента двигателя в процессе пуска. При включении реактора последовательно с активным сопротивлением в первый момент пуска двигателя при частоте тока ротора, равной частоте сети, индуктивное сопротивление реактора велико и оно ограничивает пусковой ток. По мере разгона двигателя ротора  уменьшается, но одновременно с этим уменьшается и частота во вторичной цепи. При этом уменьшается и индуктивное сопротивление ротора, в результате чего ток ротора спадает не столь интенсивно, как при наличии только активного сопротивления.
уменьшается, но одновременно с этим уменьшается и частота во вторичной цепи. При этом уменьшается и индуктивное сопротивление ротора, в результате чего ток ротора спадает не столь интенсивно, как при наличии только активного сопротивления.
В конце пуска замыкаются контакты K и двигатель выводится на естественную механическую характеристику.
При введении индуктивного сопротивления в цепь статора или ротора уменьшается критическое скольжение и максимальный момент. Механические характеристики асинхронного двигателя при этом будут иметь вид (рис.4.7).
4.5.3 Влияние напряжения питающей сети
Рассмотрим влияние изменения напряжения сети на механические характеристики асинхронного двигателя. Из выражений (4.7) и (4.11) следует, что ток ротора  , а значит и
, а значит и  пропорциональны приложенному напряжению, а момент двигателя его квадрату
пропорциональны приложенному напряжению, а момент двигателя его квадрату
 ,
, 
В то же время критическое скольжение  от напряжения не зависит. Синхронная скорость АД
от напряжения не зависит. Синхронная скорость АД  также остаётся неизменной.
также остаётся неизменной.
 Уменьшение напряжения сети, не изменяя критического скольжения, приводит к значительному снижению максимального момента (рис. 4.8). Крутизна механических характеристик при снижении напряжения возрастает. Устойчивая работа АД при
Уменьшение напряжения сети, не изменяя критического скольжения, приводит к значительному снижению максимального момента (рис. 4.8). Крутизна механических характеристик при снижении напряжения возрастает. Устойчивая работа АД при  возможна только в интервале от
возможна только в интервале от  до
до  .
.
Например, при снижении напряжения на 30% критический момент снизится на 5% по сравнению с номинальным режимом. При пуске снижение напряжения может оказаться ещё большим из-за больших значений пускового тока. Поэтому при длинных линиях питания АД, а также для мощных АД, когда их мощность соизмерима с мощностью трансформаторной подстанции, необходимо выполнить расчёты, подтверждающие возможность нормального пуска при пониженных напряжениях. По этой же причине считается допустимым снижение напряжения после аварийных режимов в пределах  % номинального значения. Особенно опасно снижение напряжения для приводов, которые запускаются под нагрузкой.
% номинального значения. Особенно опасно снижение напряжения для приводов, которые запускаются под нагрузкой.
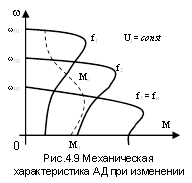
4.5.4 Влияние частоты питающей сети
Изменение частоты питающей сети приводит не только к изменению критического скольжения и максимального момента, но и синхронной скорости
 ,
,  (4.22)
(4.22)
Если питать двигатель от источника пониженной частоты, то для обеспечения нормальных энергетических показателей необходимо соответственно снижать и напряжение.
Вместе с этой лекцией читают "Промысловая подготовка газа".
Действительно, если пренебречь потерей напряжения в статоре, то можно записать следующее приближенное выражение для напряжения на зажимах двигателя:
 . (4.23)
. (4.23)
Из этого выражения следует, что при  с уменьшением частоты
с уменьшением частоты  будет увеличиваться магнитный поток двигателя Ф. А так как двигатели выполняют с насыщенной магнитной системой, то это приведет к значительному увеличению намагничивающего тока. В результате увеличения потери в двигателе и уменьшится
будет увеличиваться магнитный поток двигателя Ф. А так как двигатели выполняют с насыщенной магнитной системой, то это приведет к значительному увеличению намагничивающего тока. В результате увеличения потери в двигателе и уменьшится  .
.
С изменением частоты f1 изменяется  , а поэтому на характеристике может оказывать существенное влияние и сопротивление
, а поэтому на характеристике может оказывать существенное влияние и сопротивление  , роль которого с изменением может меняться. Например при значительном снижении частоты, когда влияние величины из – за уменьшения становится значительным, критический момент заметно уменьшается.
, роль которого с изменением может меняться. Например при значительном снижении частоты, когда влияние величины из – за уменьшения становится значительным, критический момент заметно уменьшается.
Критическое скольжение и синхронная скорость изменяются в одинаковой степени, критическое скольжение уменьшается с ростом частоты, и с уменьшением ее растет.
Характеристики в пределах рабочей части будут, параллельны друг другу с изменением частоты меняется и пусковой момент.




















