
Тормозные режимы двигателей последовательного возбуждения
3.6 Тормозные режимы двигателей последовательного возбуждения
Возможности двигателей последовательного возбуждения в тормозных режимах ограничены по сравнению с двигателями независимого возбуждения
Двигатели последовательного возбуждения могут иметь два тормозных режима – режим противовключения и режим динамического торможения.
Рекуперативный режим практически не может быть осуществлен, т.к. при уменьшении нагрузки двигателя, работающего в двигательном режиме, происходит снижение магнитного потока и повышение скорости вращения до 5-6 кратного значения, что является недопустимым для двигателя, т.к. он может уйти «в разнос». Кроме того, ЭДС якоря двигателя в этом режиме не может превысить напряжение сети (Е<Uсети), т.к скорость двигателя не может возрастать до ω=∞.
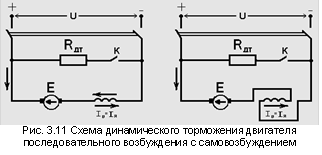
3.6.1 Динамическое торможение двигателя последовательного возбуждения
Динамическое торможение возможно осуществить двумя способами:
- по схеме с независимым возбуждением;
- по схеме с самовозбуждением;
Динамическое торможение с независимым возбуждением
Рекомендуемые материалы
При динамическом торможении двигателя последовательного возбуждения по схеме с независимым возбуждением обмотка возбуждения двигателя подключается к сети (рис. 3.10) через добавочное сопротивление Rвд. Обмотка якоря двигателя замыкается на внешнее сопротивление RDT. Для того, чтобы двигатель получил номинальный поток Фн и достаточный тормозной момент, ток возбуждения должен быть равен номинальному току якоря двигателя. Следовательно, мощность возбуждения практически должна быть равной номинальной мощности двигателя, что экономически невыгодно.
Так как двигатель работает генератором с независимым возбуждением, то его характеристики не отличаются от характеристик двигателя независимого возбуждения при динамическом торможении. Эти характеристики линейны и пересекаются в начале координат. Достоинством такого торможения является возможность плавного торможения.
 Так как двигатель работает генератором с независимым возбуждением, то его характеристики не отличаются от характеристик двигателя независимого возбуждения при динамическом торможении. Эти характеристики линейны и пересекаются в начале координат. Достоинством такого торможения является возможность плавного торможения.
Так как двигатель работает генератором с независимым возбуждением, то его характеристики не отличаются от характеристик двигателя независимого возбуждения при динамическом торможении. Эти характеристики линейны и пересекаются в начале координат. Достоинством такого торможения является возможность плавного торможения.
Недостатком этого вида торможения является также то, что при исчезновении напряжения в сети может исчезнуть магнитный поток и тормозной момент станет равным нулю.
Следовательно, получение требуемых механических характеристик может быть осуществлено при значительно худших энергетических показателях.
При втором способе обмотки якоря и обмотка возбуждения отключаются от сети и замыкаются на тормозное сопротивление  (рис. 3.11, а). Двигатель превращается в генератор с самовозбуждением. Так как в тормозном режиме ток в обмотке якоря изменяет направление по сравнению с двигательным режимом, то во избежание размагничивания полюсов машины направление тока в ОВ следует оставить прежним. Для этого необходимо включить двигатель по схеме рис. 3.11, б.
(рис. 3.11, а). Двигатель превращается в генератор с самовозбуждением. Так как в тормозном режиме ток в обмотке якоря изменяет направление по сравнению с двигательным режимом, то во избежание размагничивания полюсов машины направление тока в ОВ следует оставить прежним. Для этого необходимо включить двигатель по схеме рис. 3.11, б.
Для возникновения и осуществления режима самовозбуждения необходимо выполнение следующих условий:
1) наличие остаточного магнитного потока  ;
;
2) совпадение  с потоком
с потоком  , создаваемым током возбуждения;
, создаваемым током возбуждения;
3) замкнутость цепи якоря;
4) скорость ДПТ должна отличаться от нуля.
5) 
При этих условиях торможение с самовозбуждением будет происходить следующим образом. Из – за наличия при вращении якоря в нем будет наводится ЭДС, под действием которого по якорю и ОВ протекает ток. Этот ток создает основной магнитный поток  , который совпадая по направлению с
, который совпадая по направлению с  приведет к увеличению ЭДС. Это в свою очередь повлечет за собой увеличение тока в двигателе последовательного возбуждения (ДTП), и такой процесс самовозбуждения будет продолжаться до тех пор, пока ЭДС не станет равной суммарному падению напряжения в цепи якоря.
приведет к увеличению ЭДС. Это в свою очередь повлечет за собой увеличение тока в двигателе последовательного возбуждения (ДTП), и такой процесс самовозбуждения будет продолжаться до тех пор, пока ЭДС не станет равной суммарному падению напряжения в цепи якоря.
Из теории машин последовательного возбуждения известно, что работа с самовозбуждением возможна в том случае, если при определенной скорости ω и сопротивлении цепи якоря машин Rя. ЭДС якоря машина Е, определённая величиной магнитного потока Ф и скоростью вращения ω, больше падения напряжения в сопротивлении тормозного контура
E≥Iя(Rя+Rв+Rдт).
Из теории машин известно также, что ЭДС машины зависит от тока возбуждения Iв(ф) по кривой холостого хода Е=f(Iя). В то же время при постоянном сопротивлении в цепи якоря ЭДС Е зависит от тока Iя, поэтому в графическом изображении существованию этого равенства соответствует точка пересечения кривой Е=f(Iя) и линии, характеризующей падение напряжения в цепи якоря
Iя(Rя+Rв+Rдт)=f(Iя)
 На рис. 3.12 представлены зависимости E=f(Iя) при различных значениях ω. Для заданной скорости ω условия возможности работы двигателя будет в том случае, если R=Rя+Rв+Rдт<Rкр (критического сопротивления). Rкр соответствует случаю, когда кривая Iд·R=f(Iя) является касательной к кривой E=f(Iя). Чтобы работа двигателя была возможна при больших сопротивлениях R, необходимо увеличивать скорость ω.
На рис. 3.12 представлены зависимости E=f(Iя) при различных значениях ω. Для заданной скорости ω условия возможности работы двигателя будет в том случае, если R=Rя+Rв+Rдт<Rкр (критического сопротивления). Rкр соответствует случаю, когда кривая Iд·R=f(Iя) является касательной к кривой E=f(Iя). Чтобы работа двигателя была возможна при больших сопротивлениях R, необходимо увеличивать скорость ω.
Наименьшая скорость машины, при которой она ещё может самовозбудиться будет иметь место в том случае, если машина замкнута накоротко
R=Rкр.min=Rя+Rв
Следовательно, машина не будет самовозбуждаться в том случае, если
R>Rкр и ω<ωкр
т.е. при уменьшении скорости (торможением) до ωкр машина самовозбуждаться не будет, не будет и динамического торможения.
Процесс самовозбуждения машин происходит весьма быстро, что приводит к недостаточно плавному торможению и возникновению значительных динамических нагрузок в рабочей машине.
 Так как тормозной момент
Так как тормозной момент  , то со снижением скорости
, то со снижением скорости  снижается быстрее, чем уменьшается скорость, т.е. тормозной эффект с уменьшением скорости резко падает, а при скорости ниже критической происходит исчезновение тормозного эффекта. Как следует из кривых, представленных на рис. 3.12, двигатель самовозбуждается при заданном сопротивлении цепи якоря лишь при определённых значениях скорости. При возбуждении в двигателе создаётся тормозной момент. Механические характеристики двигателя при динамическом торможении с самовозбуждением имеют вид, представленный на рис. 3.13. Практически тормозной момент возникает и при скоростях близких к нулю, вследствие наличия остаточного магнетизма, но при низких скоростях тормозной момент мал по величине.
снижается быстрее, чем уменьшается скорость, т.е. тормозной эффект с уменьшением скорости резко падает, а при скорости ниже критической происходит исчезновение тормозного эффекта. Как следует из кривых, представленных на рис. 3.12, двигатель самовозбуждается при заданном сопротивлении цепи якоря лишь при определённых значениях скорости. При возбуждении в двигателе создаётся тормозной момент. Механические характеристики двигателя при динамическом торможении с самовозбуждением имеют вид, представленный на рис. 3.13. Практически тормозной момент возникает и при скоростях близких к нулю, вследствие наличия остаточного магнетизма, но при низких скоростях тормозной момент мал по величине.
При таком способе торможения в начале может происходить интенсивное самовозбуждение, которое приводит к значительному скачку тормозного момента, который при сравнительно больших маховых массах механизма может вызвать нежелательные удары в механизме.
Кроме того, при возрастании скорости резко увеличивается ЭДС Е, что также приводит к тому что процесс торможения имеет неудовлетворительную плавность. Более эффективным и плавным является динамическое торможение по схеме с независимым возбуждением. Поэтому динамическое торможение по схеме с самовозбуждением применяется преимущественно как аварийное торможение в случае исчезновения напряжения питающей сети.
3.6.2 Торможение противовключением двигателя последовательного возбуждения
Противовключение основной тормозной режим двигателя последовательного возбуждения. Также, как и для двигателя независимого возбуждения этот тормозной режим может быть осуществлен:
а) изменением полярности напряжения на зажимах двигателя при реактивном статическом моменте  ;
;
"6 Закон исключенного третьего" - тут тоже много полезного для Вас.
б) введением добавочного сопротивления  в цепи якоря при активном статическом моменте
в цепи якоря при активном статическом моменте  .
.
Предположим, что в исходном состоянии двигатель работает на естественной характеристике в точке «А». Если изменить полярность напряжения на зажимах двигателя (рис 3.14, а), двигатель перейдёт из точки «А» в точку «В» на искусственной характеристике 3, соответствующей изменению полярности напряжения. При этом ток якоря и момент двигателя изменит своё направление
 (3.19)
(3.19)
Под действием тормозного момента двигатель начнёт тормозиться. Участок характеристики ВС соответствует режиму противовключения. Участок СД соответствует режиму реверса двигателя. В точке «Д» двигатель будет работать в установившемся режиме после окончания реверса.
 При активном статическом моменте режим противовключения может быть получен только введением в цепь якоря добавочного сопротивления Rп (рис. 3.14, в). В этом случае двигатель переходит из точки «А» в точку «В». На участке ВС (рис. 3.14, г) двигатель тормозится и работает в двигательном режиме, на участке СД - в режиме противовключения. В точке «Д» двигатель работает в установившемся режиме со скоростью ω2.
При активном статическом моменте режим противовключения может быть получен только введением в цепь якоря добавочного сопротивления Rп (рис. 3.14, в). В этом случае двигатель переходит из точки «А» в точку «В». На участке ВС (рис. 3.14, г) двигатель тормозится и работает в двигательном режиме, на участке СД - в режиме противовключения. В точке «Д» двигатель работает в установившемся режиме со скоростью ω2.
Также, как и для двигателя независимого возбуждения этот способ характеризуется большими потерями в процессе торможения. В режиме противовключения при активном статическом моменте потребляется из сети электрическая мощность – мощность поступающая с вала и преобразуется в электрическую и теряется в сопротивлениях якоря двигателя. Однако, этот метод обладает наиболее эффективным торможением, поэтому для данного двигателя этот метод торможения является основным.



















