
Хаос в простых моделях динамических систем
ГЛАВА IV. Хаос в простых моделях динамических систем
Основные определения
Одно из фундаментальных понятий, изучаемых в нашем курсе, – это понятие динамической системы. О динамической системе говорят в том случае, если можно указать такой набор величин, называемых динамическими переменными и характеризующих состояние системы, что их значения в любой последующий момент времени получаются из исходного набора по определенному правилу. Это правило задает оператор эволюции системы. Если состояние системы задается набором N величин, то изменение состояния во времени, или динамику системы, можно представить как движение точки по траектории в N-мерном фазовом пространстве, которую называют фазовой траекторией.
Когда-то в понятие динамической системы вкладывали чисто механическое содержание, имея в виду набор тел, связанных силовыми взаимодействиями и подчиняющихся системе дифференциальных уравнений, вытекающих из законов Ньютона. По мере развития науки понятие динамической системы становилось шире, охватывая объекты разной природы. Современное понятие динамической системы это результат длительной эволюции научных представлений и синтеза достижений многих дисциплин. Оно подразумевает возможность задания оператора эволюции любым способом, не обязательно дифференциальным уравнением. В последнее время и в теоретических исследованиях, и в работах прикладного характера рассматривают системы с дискретным временем, называемые каскадами (в отличие от динамических систем с непрерывным временем, называемых потоками), которые описываются рекуррентными отображениями. В этом случае под фазовой траекторией следует понимать некоторую дискретную последовательность точек в фазовом пространстве.
Выделяют два класса динамических систем – консервативные и диссипативные.
В физике свойство консервативности понимается как сохранение энергии. В частности, механические колебательные системы в отсутствие трения относятся к консервативным системам. В присутствии трения механическая энергия не сохраняется, а постепенно рассеивается (диссипирует) и переходит в тепло, т. е., в энергию микроскопического движения молекул, составляющих систему и ее окружение. Строго говоря, в этом случае временная эволюция должна определяться не только состоянием самой системы, но и окружением. Все же и в этой ситуации описание в рамках концепции динамических систем, заданных, например, дифференциальными уравнениями, очень часто оказывается разумным и достаточно точным. Это будет уже диссипативная динамическая система.
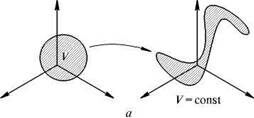
Пусть есть некоторая динамическая система, т.е., задано фазовое пространство и указан оператор эволюции. Вместо одной системы рассмотрим ансамбль, состоящий из большого количества ее идентичных копий, причем все представители ансамбля могут отличаться друг от друга только лишь начальными условиями. В фазовом пространстве ансамбль представляется облаком изображающих точек. С течением времени каждая изображающая точка перемещается в фазовом пространстве, как предписано динамическими уравнениями системы, так что форма облака и его размеры будут меняться.
Может случиться, что объем облака в процессе временной эволюции будет оставаться постоянным. Это характерно для консервативных систем, к которым относятся, в частности, рассматриваемые в классической механике гамильтоновы системы.
Рекомендуемые материалы
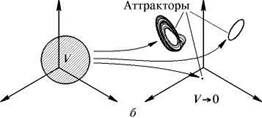
Что касается диссипативных систем, то для них характерно, что с течением времени облако изображающих точек «съеживается» и концентрируется в итоге на одном или нескольких аттракторах – подмножествах фазового пространства, обладающих обычно нулевым фазовым объемом. С точки зрения динамики во времени, это означает, что режим, возникающий в системе, предоставленной самой себе в течение длительного времени, становится не зависящим от начального состояния (по крайней мере, при вариации начальных условий в некоторых конечных пределах).
Простые примеры аттракторов – устойчивое состояние равновесия и устойчивый предельный цикл – замкнутая фазовая траектория, к которой стремятся с течением времени все близкие траектории. Предельный цикл отвечает, как известно, режиму периодических автоколебаний.
При наличии в фазовом пространстве двух или более аттракторов говорят, что имеет место, соответственно, бистабильность или мулътистабиносmъ. Множество точек фазового пространства, из которых траектории приходят в конце концов к какому-то одному аттрактору, называется бассейном этого аттрактора.
Одним из важных понятий теории динамических систем является понятие инвариантного множества. Множество точек фазового пространства называют инвариантным в том случае, если фазовая траектория, стартующая из любой его точки, целиком принадлежит этому множеству. Любой аттрактор есть инвариантное множество, но не наоборот. Неустойчивые неподвижные точки, неустойчивые замкнутые орбиты – это тоже инвариантные множества.
Следует осознавать, что понятие динамической системы есть теоретическая абстракция, так же как многие другие привычные и полезные научные абстракции (материальная точка, абсолютно твердое тело, несжимаемая жидкость, идеальный газ). Реальные объекты могут рассматриваться как динамические системы только в определенном приближении, в той мере, в какой при описании динамики можно игнорировать тонкие детали внутренней структуры системы и ее взаимодействие с окружающим миром.
Успехи классической механики в XVII–XIX вв. были столь впечатляющими, что стало казаться возможным представлять себе всю Вселенную как одну гигантскую динамическую систему. Эту позицию четко сформулировал Лаплас: «Состояние системы природы в настоящем есть, очевидно, следствие того, каким оно было в предыдущий момент, и если мы представим себе разум, который в данное мгновение постиг все связи между объектами Вселенной, то он сможет установить соответствующие положения, движения и общие воздействия этих объектов в любое время в прошлом или в будущем» (1776 год). Эта доктрина, получившая название лапласовского детерминизма, выразила в концентрированном виде идеал научного познания, каким он виделся в те времена. Понадобился длительный путь развития науки и научного мировоззрения (теория поля, термодинамика и статистическая физика, квантовая механика), чтобы убедиться в несостоятельности такого представления о мире.
Идеал лапласовского детерминизма принципиально недостижим даже в том случае, если ограничиться рамками абстракции динамических систем. Феномен, ярко демонстрирующий это обстоятельство, был открыт и стал общеизвестным в последние несколько десятилетий – это динамический хаос. Хаотические режимы характеризуются нерегулярным, похожим на случайный процесс, изменением динамических переменных во времени. В диссипативных системах хаос ассоциируется с наличием в фазовом пространстве странных аттракторов – сложно устроенных фрактальных множеств, притягивающих к себе все траектории из некоторой прилегающей области –бассейна аттрактора.
Возможность хаотического поведения кажется на первый взгляд несовместимой с самим определением динамической системы, основанном на утверждении о возможности однозначного предсказания конечного состояния по исходному. Цель настоящего курса – показать, что упомянутое противоречие только кажущееся, и продемонстрировать присутствие хаоса в динамических системах. Для этого обратимся к моделям, представляющим собой искусственно сконструированные «игрушечные» примеры, которые, во-первых, представляют собой динамические системы в смысле общего определения, во-вторых, допускают детальный теоретический анализ и, в-третьих, демонстрируют хаотическое поведение.
Одномерные отображения
Рассмотрим модельные системы, состояние которых характеризуется единственной переменной Х, т. е., фазовое пространство одномерно, а оператор эволюции задается рекуррентным отображением вида  , где n – дискретное время.
, где n – дискретное время.
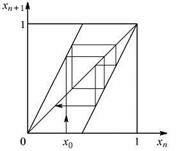
Отображение «зуб пилы». Рассмотрим систему, оператор эволюции которой задан следующим правилом определения нового состояния по предыдущему:

где фигурные скобки обозначают дробную часть числа. В другой общеупотребительной форме это соотношение записывают как

Это динамическая система, заданная одномерным рекуррентным отображением. На рисунке показан график отображения и построена итерационная диаграмма, иллюстрирующая несколько первых шагов динамики, начиная с некоторого начального состояния.
Пусть в качестве начального состояния выбрано некоторое число x0, принадлежащее интервалу от 0 до 1. Запишем это число в двоичной системе счисления:
x0 = 0,01011010001010011001010...
Теперь один шаг эволюции во времени согласно уравнению (2.1) или (2.2) состоит в том, что последовательность нулей и единиц сдвигается влево на одну позицию, и цифра, оказавшаяся по левую сторону от запятой, отбрасывается. Имеем:
x1 = 0,1011010001010011001010...
x2 = 0,011010001010011001010 ...
x3 = 0,11010001010011001010 ...
и т. д. Ясно, что присутствие цифры 0 или 1 на первой позиции после запятой показывает, в какой половине единичного интервала – левой или правой пребывает динамическая переменная xn в данный момент.
Что же следует из такого представления динамики. Предположим сначала, что двоичная дробь периодическая, это будет так, если х0 рациональное число. Ясно, что состояние системы будет периодически повторять исходное через число временных шагов, равное периоду двоичного кода х0. Такой характер движения будет соответствовать любому рациональному числу, а эти числа, как известно, образуют на единичном интервале бесконечное счетное множество. Следовательно, система обладает бесконечным счетным множеством периодических орбит (циклов).
Непериодические двоичные дроби, отвечающие иррациональным числам x0, образуют множество с мощностью континуума. Следовательно система имеет континуум непериодических траекторий.
Возможно задать начальное условие числом, имеющим произвольную последовательность нулей и единиц в своей двоичной записи. Возьмем случайную последовательность, которую можно получить подбрасыванием монеты, записывая результаты испытаний по правилу орел – 0, решка – 1: 010010... Тогда при задании начального состояния х0 = 0,010010... динамическая система в процессе своей эволюции будет посещать левую и правую половину единичного интервала, следуя нашей случайной последовательности. Получим хаос, причем, в системе, описываемой детерминированным уравнением.
Преобразование двоичной последовательности, состоящее в сдвиге всех ее символов на одну позицию, называют сдвигом Бернулли. (По ассоциации с известной в теории вероятности схемой Бернулли, которая заключается в последовательности независимых испытаний, когда каждое испытание имеет два возможных исхода с вероятностями р и 1-р.)
Предположим теперь, что взято очень близкое, но другое начальное значение х0. Очень близкое – это значит, что достаточно большое количество цифр двоичной записи до некоторой позиции, например 25-й, совпадает, а дальнейшие цифры («хвост») какие-то совсем иные. Тогда после 25 временных шагов, т. е., сдвигов Бернулли, начало хвоста как раз придвинется к разделительной запятой. Дальнейшая динамика и последовательность посещений левой и правой половины единичного интервала будет определяться структурой хвоста и, следовательно, будет совершенно другой, нежели это имело место для исходного начального условия. Таким образом, имея возможность контролировать точность задания начального условия до 25-го двоичного знака, мы можем правильно предсказывать попадание xn в левую или правую половину единичного интервала лишь на протяжении первых 25 временных шагов.
Если динамическая система, подобная по своим свойствам рассматриваемой модели, привлекается для описания какой-либо физически реалистичной ситуации, то попытка предсказания состояния на N шагов вперед сталкивается при увеличении N с необходимостью столь точного задания начальных условий, что это становится в конце концов принципиально невозможным.
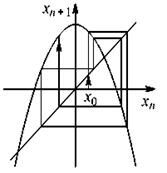
Логистическое отображение. Обратимся к следующему примеру – логистическому отображению
 ,
,
где хn – динамическая переменная, a λ – параметр, от величины которого зависит характер динамики. Это тоже искусственно сконструированная модель динамической системы, но она имеет достаточно реалистичную интерпретацию в биологии для описания динамики численности некоторых
биологических популяций. Логистическое отображение может быть представлено в виде  , обе формы записи эквивалентны и сводятся друг к другу заменой переменной и параметра:
, обе формы записи эквивалентны и сводятся друг к другу заменой переменной и параметра:
 ,
,  .
.
Рассмотрим хаос в логистическом отображении, следуя замечательно простой идее, развитой в конце 40-х годов Уламом и фон Нейманом. Их подход применим при частном значении параметра λ = 2. В отображении, которое принимает вид
 (*)
(*)
выполним замену переменной

После подстановки выражения указанного вида для xn+1 и хn в правую и левую часть уравнения получаем
 .
.
Используя соотношение  ,
,
получим 
Это соотношение справедливо для всех n, если потребовать, чтобы переменная уn удовлетворяла рекуррентному уравнению
 . (**)
. (**)
Последовательность  будет подчиняться исходному уравнению (*). Соотношение (**) по сути – исследованное в предыдущем разделе отображение «зуб пилы», для которого было установлено присутствие хаоса. Следовательно, хаос имеет место и в логистическом отображении. Зададим у0 двоичной дробью в виде случайной последовательности нулей и единиц. Тогда динамика уn будет хаотической; в терминах двоичного кода она представляется сдвигом Бернулли. Соответственно, хаотической будет и динамика хn при старте из начальной точки
будет подчиняться исходному уравнению (*). Соотношение (**) по сути – исследованное в предыдущем разделе отображение «зуб пилы», для которого было установлено присутствие хаоса. Следовательно, хаос имеет место и в логистическом отображении. Зададим у0 двоичной дробью в виде случайной последовательности нулей и единиц. Тогда динамика уn будет хаотической; в терминах двоичного кода она представляется сдвигом Бернулли. Соответственно, хаотической будет и динамика хn при старте из начальной точки  . Интересно, что это хаотическое решение рекуррентного уравнения (*) можно записать в явном виде с помощью формулы
. Интересно, что это хаотическое решение рекуррентного уравнения (*) можно записать в явном виде с помощью формулы

Рассмотрим другой подход к обоснованию хаотической динамики логистического отображения при λ = 2. Зададимся вопросом: можно ли итерировать отображение (*) назад во времени? Выражая с помощью него хn через хn+1, получим
 , (2.7)
, (2.7)
т. е., заданному xn+1 может предшествовать одно из двух значений хn, отвечающих разному выбору знака перед квадратным корнем. Обеспечить однозначность при итерациях в обратном времени можно только указав на каждом шаге, какой знак квадратного корня выбрать. Зададим произвольную бесконечную последовательность из двух символов R и L, например,
RLLRLLLRRLLRLRRLL...
и будем на каждом очередном шаге выбирать знак «+», если очередной символ R, и «-», если очередной символ L. Соответственно этому, получаемое значение хn будет располагаться на правом (Right) или на левом (Left) склоне параболы. Заметим, что какой бы ни была RL-последовательность, начав итерации, мы никогда не встретимся с появлением под корнем отрицательного числа. Действительно, из из последнего соотношения видно, что неравенство  влечет
влечет  . Поэтому ничто не мешает взять в качестве RL-кoдa последовательность, полученную посредством случайных испытаний. Возьмем теперь точку x, в которую мы попали в результате многократных итераций в обратном времени, за начальное условие для уравнения (*). Система будет эволюционировать хаотически, посещая левый и правый склоны параболы в точном соответствии с символами R и L нашей случайной последовательности, читаемой в обратном порядке.
. Поэтому ничто не мешает взять в качестве RL-кoдa последовательность, полученную посредством случайных испытаний. Возьмем теперь точку x, в которую мы попали в результате многократных итераций в обратном времени, за начальное условие для уравнения (*). Система будет эволюционировать хаотически, посещая левый и правый склоны параболы в точном соответствии с символами R и L нашей случайной последовательности, читаемой в обратном порядке.
Подчеркнем, что все сказанное справедливо благодаря специальному выбору значения параметра λ = 2. Если провести аналогичные рассуждения для λ < 2, то окажется, что, стартовав от некоторого определенного x, при итерациях в обратном времени можно использовать не все возможные RL-последовательности, a лишь некоторое их подмножество. Причем это подмножество становится все более и более тощим с уменьшением λ. В заключение отметим, что два рассмотренных подхода – по Уламу - фон Нейману и на основе итераций в обратном времени – отвечают разным правилам кодирования траекторий логистического отображения последовательностями двух символов.
Двумерные отображения, сохраняющие площадь.
Отображение пекаря.
Построим отображение, отправляясь от рассмотрения динамики типа сдвига Бернулли на множестве последовательностей бесконечных в обе стороны. Запишем такую последовательность в виде
 (*)
(*)
где каждое si есть либо 0, либо 1. Обратите внимание на особый разделительный символ – точку с запятой, который встречается в одном-единственном месте; его присутствие позволяет соотносить положение символов с некоторым «началом отсчета».
Введем две динамические переменные – действительные числа х и у, принадлежащие единичному интервалу, определив их через символы si следующим образом:


Пусть трансформация последовательности (*) за один временной шаг состоит в том, что все символы сдвигаются на одну позицию вправо, так что результатом окажется
 .
.
Тогда новые значения x и у будут

Их можно выразить через старые значения x и у следующим образом:

 ,
,
где фигурные скобки обозначают дробную часть числа, а квадратные – целую часть. Другая форма записи тех же соотношений:
 для
для 
 для
для 
По самому своему построению наша система может демонстрировать хаотическую динамику: чтобы получить хаос нужно взять в качестве последовательности (*) случайный набор символов. Система имеет также бесконечное множество периодических орбит (циклов) – им отвечают периодические последовательности.
В отличие от примеров, приведенных в предыдущем разделе, здесь приходим к двумерному отображению, описывающему динамику в терминах переменных х и у. Мгновенное состояние нашей системы определяется заданием этих двух величин, причем обе они необходимы для того, чтобы иметь возможность находить последующие состояния по известному начальному.
Можно ли представить себе действие двумерного отображения в наглядной геометрической форме? Такое представление существует, и именно оно послужило основанием назвать данную модель отображением пекаря. Рассмотрим единичный квадрат на плоскости (x, у). Разрезаем его пополам, как кусок теста, накладываем одну половинку на другую и раскатываем так, чтобы восстановить исходную форму (см. рисунок).
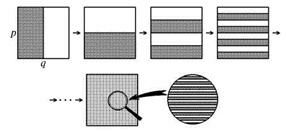
Для наглядности «тесто», оказавшееся слева при первом разрезе, изображено темным, а справа – светлым. На рисунке показано, как выглядит распределение темного и светлого теста на нескольких последовательных шагах. При большом числе итераций это распределение принимает вид набора тонких и длинных чередующихся темных и светлых полосок. При многократном повторении процедуры в конце концов получаем кусок теста, который выглядит однородным. Взяв для пробы небольшой кусочек, мы обнаружим в нем присутствующие в равных долях темную и светлую составляющие. Описанное свойство отображения пекаря называется именно так, как мы его и назвали бы на «бытовом» языке, – перемешивание.
Отображение пекаря является консервативной системой или, используя терминологию, специфическую для двумерных отображений, это отображение, сохраняющее площадь. Если взять некоторую область на плоскости (x, у) и подвергнуть каждую ее точку действию отображения пекаря, то она перейдет в некоторую другую по форме область, но площадь новой области останется той же самой. Формальное правило для проверки этого свойства состоит в том, что должен равняться единице определитель, построенный из производных, – якобиан. Для отображения пекаря имеем:

В более широком контексте вместо «площадь» говорят «мера». В случае двумерного фазового пространства мера – это площадь, в случае одномерного – длина, в случае трехмерного – объем. Мы уже интерпретировали представленную на рисунке динамику как перемешивание слоев двух сортов теста или, если угодно, двух жидкостей – темной и светлой. Сохранение меры отвечает тому, что эти жидкости являются несжимаемыми.
Странные хаотические аттракторы
Рассмотрим примеры, иллюстрирующие принципиальную возможность хаоса как стационарного режима динамики диссипативных систем. (Имеется в виду стационарность в статистическом смысле, когда постоянны лишь усредненные за достаточно большой интервал времени статистические характеристики динамики.) Это двумерные и трехмерные модельные отображения, в фазовом пространстве которых имеется притягивающее множество сложной структуры, называемое странным хаотическим аттрактором.
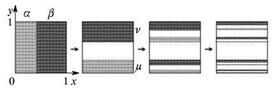
Обобщенное отображение пекаря. Модифицируем рассмотренное выше отображение пекаря. Пусть первоначальный разрез «куска теста» – единичного квадрата производится в отношении  к
к  , при этом
, при этом  . Далее оба куска растягиваются по горизонтали до единичной длины, сжимаются по вертикали, так что их высоты будут соответственно
. Далее оба куска растягиваются по горизонтали до единичной длины, сжимаются по вертикали, так что их высоты будут соответственно  и
и  ,
,  , и располагаются в пределах единичного квадрата у верхнего и нижнего его края.
, и располагаются в пределах единичного квадрата у верхнего и нижнего его края.
В аналитической форме предлагаемое отображение записывается следующим образом:
 для
для 
 для
для 
Заметим, что суммарная площадь прямоугольников, образовавшихся после применения преобразования, уменьшилась на фактор , т. е., оно уже не относится к классу сохраняющих площадь. Это диссипативная система с двумерным фазовым пространством. На рисунке показано, что происходит при нескольких последовательных итерациях обобщенного отображения пекаря. Образуется характерная система горизонтальных полос, суммарная ширина которых убывает с ростом числа итераций как  . Объект, возникающий в пределе бесконечно большого числа итераций, в сечении представляет собой так называемое двухмасштабное канторово множество. Процедура его построения состоит в том, что берется единичный отрезок, делится в отношении
. Объект, возникающий в пределе бесконечно большого числа итераций, в сечении представляет собой так называемое двухмасштабное канторово множество. Процедура его построения состоит в том, что берется единичный отрезок, делится в отношении  , и средняя часть исключается. То же самое проделывается с двумя оставшимися отрезками, затем с каждым из отрезков, возникших на предыдущем шаге, и т. д. Заметим, что классическое множество Кантора отвечает частному случаю данного построения, а именно, выбору
, и средняя часть исключается. То же самое проделывается с двумя оставшимися отрезками, затем с каждым из отрезков, возникших на предыдущем шаге, и т. д. Заметим, что классическое множество Кантора отвечает частному случаю данного построения, а именно, выбору  .
.
Аттрактор имеет нулевую меру, поскольку суммарная площадь полос на n-м шаге дается выражением  и стремится к нулю при
и стремится к нулю при  , так как
, так как  . Все точки исходного единичного квадрата приближаются к аттрактору. В то же время аттрактор обладает тем свойством, что соседние по горизонтали точки удаляются друг от друга при последовательных итерациях, т. е., имеет место неустойчивость. Отметьте сочетание устойчивости в смысле наличия притяжения к аттрактору и неустойчивости в смысле разбегания точек на аттракторе. Поперечная структура в виде канторова или кантороподобного множества очень характерна для странных аттракторов.
. Все точки исходного единичного квадрата приближаются к аттрактору. В то же время аттрактор обладает тем свойством, что соседние по горизонтали точки удаляются друг от друга при последовательных итерациях, т. е., имеет место неустойчивость. Отметьте сочетание устойчивости в смысле наличия притяжения к аттрактору и неустойчивости в смысле разбегания точек на аттракторе. Поперечная структура в виде канторова или кантороподобного множества очень характерна для странных аттракторов.
Аттрактор Плыкина. Рассмотрим пример двумерного отображения, обладающего свойством непрерывности и имеющего хаотический аттрактор. Этот пример позволяет уяснить важную концепцию гиперболичности – свойства, наличие которого позволяет строго математически обосновать присутствие хаоса.
Рассмотрим область R на плоскости (x, у), показанную на рисунке. Она состоит из квадрата и трех полудисков с полукруглыми вырезами. Область покрыта штриховкой, показывающей заданное на ней поле направлений. Определим двумерное отображение так, чтобы результатом его действия на точки области R была фигура, показанная на рисунке справа. Заметьте, что поле направлений, возникающее после применения отображения, совпадает с исходным.
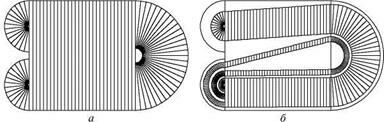 |
На следующем рисунке показано, что получается при многократном действии описанного отображения. Точки, заполнявшие в начальный момент область R, сконцентрировались на аттракторе, который представляет собой некоторое сложно и тонко устроенное множество.
 |
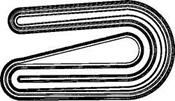
Динамика отображения Плыкина проясняется в свете следующего наблюдения. Рассмотрим точки какого-либо одного отрезка из числа образующих штриховку на предыдущем рисунке. Нетрудно видеть, что все эти точки будут демонстрировать одну и ту же динамику в том смысле, что будут одновременно посещать каждую из подобластей (квадрат и три полудиска), из которых построена область R. Если отождествить точки, принадлежащие каждому определенному отрезку, то вместо динамики в двумерном фазовом пространстве можно рассматривать одномерную динамику. Фазовым пространством для этой одномерной динамики служит «резиновая нить», имеющая две петли на одном конце и одну петлю на другом (см. рисунок).
Представим себе, что эта нить натянута на три гвоздика. Один шаг итераций будет состоять в том, что мы определенным образом растягиваем нить и вновь натягиваем ее на те же гвоздики.
Аттрактор Смейла-Вильямса. Пример хаотического аттрактора, получивший наименование соленоид Смейлa-Вилъямсa, реализуется в трехмерном отображении, которое строится следующим образом. Рассмотрим трехмерную область в форме тора. Представляя его для наглядности как резиновый бублик, растянем его в длину, сложим вдвое и вложим в исходный тор. Чтобы он там поместился, приходится предположить, что в ходе процедуры общий объем «бублика» уменьшается – площадь поперечного сечения должна уменьшиться более чем в два раза.
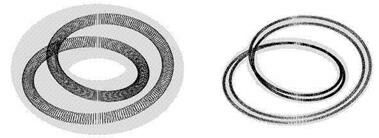
На следующем рисунке показано, как выглядит поперечное сечение исходного тора после однократного и двукратного применения отображения. Это похоже на процедуру построения множества Кантора: на каждом шаге в сечении имеется некоторое число дисков.
Очередной шаг построения состоит в том, что внутри каждого диска выделяются две меньшие области в форме дисков, которые оставляются для следующего шага, а все остальное множество исключается. То, что останется в итоге, и есть сечение аттрактора Смейла-Вильямса.
Имея в виду описанную геометрическую конструкцию, можно предложить аналитическую форму отображения. Ее удобно представить в цилиндрических координатах  , которые связаны с обычными декартовыми координатами (x, у, z) как
, которые связаны с обычными декартовыми координатами (x, у, z) как
 . (2.22)
. (2.22)
Тогда подходящей формой отображения будет


 (2.23)
(2.23)
где = 0,2,  = 0,3. Поверхность исходного тора в параметрической форме задается уравнениями
= 0,3. Поверхность исходного тора в параметрической форме задается уравнениями
Люди также интересуются этой лекцией: Эстезиология.
 ,
,  ,
, 
 ,
,  (2.24)
(2.24)
Приведенные примеры аттракторов Плыкина и Смейла-Вильямса сконструированы так, чтобы они обладали свойством, называемым гиперболичностью.
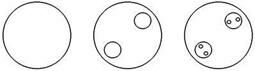
Когда говорят, что аттрактор какой-либо динамической системы гиперболический, то имеют в виду, что все принадлежащие ему траектории гиперболические (седловые), т.е., их окрестность устроена так, как показано на рисунке.
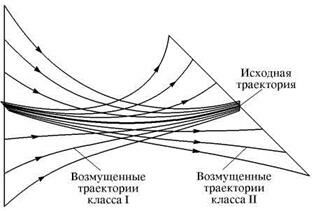
Возьмем любую траекторию на аттракторе и рассмотрим всевозможные близкие к ней возмущенные траектории. В линейном приближении среди них выделяется класс траекторий (I), которые приближаются к исходной, причем в среднем по экспоненте, и класс траекторий (II), приближающихся к исходной в обратном времени, тоже в среднем по экспоненте. Поскольку речь идет о рассмотрении динамики около исходной траектории в линейном приближении, то любой из множества инфинитезимально возмущенных траекторий сопоставляется элемент линейного векторного пространства (математики называют его касательным пространством), причем все множество исчерпывается всевозможными суперпозициями векторов, ассоциирующихся с упомянутыми выше возмущениями класса I и П. Подчеркнем еще раз, что так должна быть устроена окрестность у всех принадлежащих аттрактору траекторий.
Доказано, что системы, обладающие свойством гиперболичности, структурно устойчивы, иными словами, это свойство грубое. Если некоторая система имеет гиперболический аттрактор, то это будет справедливо и для систем, полученных произвольным достаточно малым непрерывным возмущением исходной системы. Исходя из предположения о гиперболичности аттрактора, можно строго доказать присутствие всех других свойств, являющихся существенными атрибутами хаоса.



















