
Локационные информационные системы
ГЛАВА 5. Локационные информационные системы
 Информационные системы локационного типа (ЛИС) относятся к устройствам бесконтактного действия, и реализуют слуховую бионическую функцию. Информативным параметром этих систем является модулированная волна (различной физической природы), характеристики которой определяются интегральными свойствами среды распространения. В робототехнике и мехатронике ЛИС используются для определения координат и скорости объектов в задачах управления и навигации, для обеспечения необходимой траектории движения исполнительного механизма вблизи границы раздела сред, а также в качестве средств безопасности. Отдельной областью применения является определение свойств среды распространения. Во всех случаях преобразователи ЛИС являются датчиками среды. Поскольку и система и объект находятся в некотором физическом поле, результаты измерения существенно зависят от свойств этого поля. В зависимости от пространственно-временных свойств различают поля потенциальные (например, электростатические) и вихревые (электромагнитные и акустические). Как правило, вихревые поля содержат больше параметров, пригодных для измерения и поэтому более информативны. Тем не менее, иногда (например, при работе на малых расстояниях) целесообразно использовать ЛИС, принцип действия которых основан на свойствах потенциальных полей. В любом случае, необходимые данные выделяются из информации об объекте, переносимой этим полем.
Информационные системы локационного типа (ЛИС) относятся к устройствам бесконтактного действия, и реализуют слуховую бионическую функцию. Информативным параметром этих систем является модулированная волна (различной физической природы), характеристики которой определяются интегральными свойствами среды распространения. В робототехнике и мехатронике ЛИС используются для определения координат и скорости объектов в задачах управления и навигации, для обеспечения необходимой траектории движения исполнительного механизма вблизи границы раздела сред, а также в качестве средств безопасности. Отдельной областью применения является определение свойств среды распространения. Во всех случаях преобразователи ЛИС являются датчиками среды. Поскольку и система и объект находятся в некотором физическом поле, результаты измерения существенно зависят от свойств этого поля. В зависимости от пространственно-временных свойств различают поля потенциальные (например, электростатические) и вихревые (электромагнитные и акустические). Как правило, вихревые поля содержат больше параметров, пригодных для измерения и поэтому более информативны. Тем не менее, иногда (например, при работе на малых расстояниях) целесообразно использовать ЛИС, принцип действия которых основан на свойствах потенциальных полей. В любом случае, необходимые данные выделяются из информации об объекте, переносимой этим полем.
При классификации ЛИС выделим три основных признака.
1. По физической природе носителя информации: электромагнитные, акустические, оптические, пневматические, электрические и магнитные.
2. По способу локации: активные и пассивные (рис. 5.1).
3. По типу модулирующей функции: непрерывные и импульсные.
В состав активных ЛИС входят волновой излучатель и приемник отраженного «эхо-сигнала», в то время как пассивные ЛИС регистрируют собственное излучение объекта. Примерами активных ЛИС, использующих импульсную модуляцию, являются акустические дальномеры. Принципы пассивной локации используют вихретоковые системы.
5.1. Теоретические основы локации
Движение волны, представляющее собой процесс распространения возмущения u в некоторой среде, происходит с конечной скоростью c и описывается волновым уравнением вида:
Рекомендуемые материалы


где x, y, z - ортогональные направления в однородной и изотропной среде.
Наиболее известным в волновой теории является частотное уравнение вида:
l = c/f = cT,
здесь l - длина, f - частота, T - период волны.
Механизм распространения волн в среде связан с явлениями отражения, дифракции и рефракции (искривления луча вследствие преломления), поглощения и рассеяния и различен для разных длин волн. Указанные особенности необходимо учитывать при построении ЛИС.
Особенно наглядно действие этих факторов проявляется в области радиочастот, которые широко используются в навигационных системах роботов. Так, радиоволны сверхдлинного диапазона с l более 10 км сравнительно слабо поглощаются земной корой, а на их распространение существенно влияет ионосфера, которая вместе с поверхностью Земли образует сферический волновод (рис.5.2). Длинные волны с l = 1 ...10 км, напротив, сильно поглощаются и хорошо огибают Землю; это происходит вследствие дифракции и волноводного эффекта, присущего данному диапазону волн. Средние волны (l = 100 ... 1000 м) значительно поглощаются ионосферой днем и распространяются только благодаря дифракции (так называемые земные волны). Ночью ионосферные отражения улучшаются, и дальность волн резко возрастает (эти волны получили название пространственных). Что касается коротких волн с l = 10 ... 100 м, то дифракция у них выражена слабо, однако, благодаря ионосферному отражению могут достичь точки антипода. В этом диапазоне сильно проявляются дисперсионные свойства ионосферы, а для наиболее коротких волн она и вовсе прозрачна. Ультракороткие УКВ волны (l = 1 мм … 10 м) распространяются практически прямолинейно, а на дальность влияет затухание в тропосфере и стратосфере Земли. Диапазон УКВ делится на 4 поддиапазона - метровые, сантиметровые, дециметровые и миллиметровые волны. Дальность метровых достигает 2000 км. Сантиметровые волны рассеиваются и поглощаются облаками, туманом и т.д., а миллиметровые, а также субмиллиметровые волны поглощаются газами атмосферы. Поэтому их дальность невелика, и в системах передачи информации этого диапазона применяются волноводы и другие направляющие устройства.
Под затуханием будем понимать некоторую интегральную характеристику, связанную с потерей энергии колебаний в среде, приводящей к ослаблению амплитуды сигнала. Затухание сигнала влияет на дальность его распространения. В линейных системах с одной степенью свободы амплитуда колебаний u убывает по экспоненциальному закону: u = u0 e-cзt , где cз - показатель затухания. Например, для механической системы: cз = b/2m, где b - коэффициент скоростного трения, m - масса колеблющегося тела; для колебательного контура c индуктивностью L и сопротивлением R: cз = R/2L. Теоретически затухание длится бесконечно долго, однако, на практике колебание считается закончившимся, если его амплитуда уменьшилась до 1% начальной величины. Тогда e-cзt = 0,01 или t = 4,6/cз.
Используя представление о показателе затухания можно определить глубину проникновения электромагнитных волн различной частоты f в среду. Так, для морской воды показатель затухания равен:  , где r и m - соответственно удельное сопротивление и магнитная проницаемость воды, m0 - магнитная проницаемость вакуума. Глубина проникновения d, при которой амплитуда сигнала уменьшится в е раз определится выражением: d=1/е. Следовательно, для частоты электромагнитного сигнала f = 103 Гц ( l = 300 м), rмв ~ 0,25 Ом×м и mмв = 1, получим d = 8000 м. Затухание в металлических предметах значительно выше (для стали: rс ~ 7 10-4 Ом×м << rмв и mc = 103 >> mмв) и d не превышает долей миллиметра.
, где r и m - соответственно удельное сопротивление и магнитная проницаемость воды, m0 - магнитная проницаемость вакуума. Глубина проникновения d, при которой амплитуда сигнала уменьшится в е раз определится выражением: d=1/е. Следовательно, для частоты электромагнитного сигнала f = 103 Гц ( l = 300 м), rмв ~ 0,25 Ом×м и mмв = 1, получим d = 8000 м. Затухание в металлических предметах значительно выше (для стали: rс ~ 7 10-4 Ом×м << rмв и mc = 103 >> mмв) и d не превышает долей миллиметра.
В инженерных расчетах, для определения ослабления сигнала также используется интегральный параметр, называемый коэффициентом ослабления Kосл:
Kосл = Wпр/Wизл,
где Wпр и Wизл - плотность энергетических потоков (мощность) принятого и переданного сигналов.
В общем случае, мощность принятого сигнала зависит от дальности до объекта L, свойств среды Kосл и чувствительности приемника Sпр. Для учета последних факторов вводится коэффициент интегральной чувствительности k = f(Kосл, Sпр). Тогда, в пассивной ЛИС, где волна проходит расстояние до объекта один раз, получим Wпр = Kосл Wизл = k Wизл/L2, и, следовательно
L = Ö k Wизл/Wпр
В активных ЛИС (например, в импульсных дальномерах) волна дважды проходит путь до объекта. Поэтому и ослабление сигнала будет в четыре раза больше. Для таких систем дальность определяется по формуле:
L = сDt/2,
здесь Dt - временная задержка принятого сигнала относительно момента излучения.
Эффективность ЛИС в значительной степени определяется надежностью локации (точностью обнаружения, помехоустойчивостью связи и т.д.) и дальностью ее распространения. С этой целью при посылке информационных сигналов используют направленные модулированные излучения.
5.1.1. Направленность излучения
Направленность (Н) излучателей и приемников ЛИС - это свойство, заключающееся в наличии некоторой пространственной избирательности, т.е. способности излучать (принимать) волны в одних направлениях в большей степени, чем в других.
В общем случае различают Н излучателя и Н приемника. В режиме излучения Н определяется интерференцией когерентных колебаний, приходящих в данную точку среды от отдельных (малых по сравнению с длиной волны в среде) участков излучателя или отдельных элементов сложного излучателя, состоящего из многих элементов (в частности, излучающей антенны). Для Н необходимо, чтобы
dхар >> l
где dхар - характерный размер излучателя (например, его диаметр).
В случае приемника Н вызывается интерференцией напряженностей (для звука - давлений) на его поверхности.
Н - важнейшая характеристика локации, обеспечивающая саму возможность связи. В природе она реализуется благодаря фокусировке сигнала, за счет интерференции его составляющих, излучаемых несколькими источниками. (Такими источниками у летучей мыши, например, подковоноса, являются две ноздри, расстояние между которыми приблизительно соответствует 2l излучаемого звука). Ширина диаграммы направленности излучающего аппарата летучих мышей составляет 30 ... 500, а приемного - варьируется в пределах 1 … 500. Указанные обстоятельства обеспечиваю высокую разрешающую способность локационного аппарата летучей мыши, и позволяет ей различать проволоку толщиной 0,2 мм, натянутую на расстоянии всего 5 мм от плоской отражающей поверхности. Высокая разрешающая способность характерна и для навигационной системы дельфина. В частности, афалина обнаруживает шарик диаметром 3 мм на расстоянии 5 м [ ].
Наиболее простая математическая модель, описывающая излучатель, основана на его представлении в виде дискретной или непрерывной совокупности малых по сравнению с длиной волны излучающих элементов, а поле излучателя определяется суммированием сферических волн, создаваемых отдельными элементами. Общие теоретические методы описания Н излучений основываются на использовании функций Грина, позволяющих связать геометрические характеристики излучателя и излучаемого сигнала. Однако точные решения для излучателей произвольной формы в настоящее время отсутствуют. Это обусловлено сложностью формы поля вблизи излучающей поверхности. Полученные решения относятся лишь к преобразователям, имеющим достаточно простые формы излучающих поверхностей (плоские, сферические).
Н излучателей и приемников ЛИС описывается двумя параметрами:
· характеристикой (диаграммой) направленности;
· коэффициентом концентрации.
Характеристикой Н D(r) преобразователя называется зависимость мощности или напряженности E излучаемого поля от направления r: D(r) = E(r)/E(R0). Здесь направление R0 обычно выбирают так, чтобы оно совпадало с направлением максимума излучения или максимума чувствительности (для приемника). В графическом виде характеристика Н представляется пространственной или плоской диаграммой Н (рис. 5.3), отображаемой в полярных (а) или декартовых (б) координатах. На практике обычно рассматривают модуль плоской диаграммы Н, называемый ее амплитудной характеристикой:
 |D(a)| = |E(a)|/|Emax|.
|D(a)| = |E(a)|/|Emax|.
Аргументом характеристики Н, как правило, является угол a, отсчитываемый от направления максимального излучения. Угол диаграммы зависит от частоты излучателя.
Диаграмма Н описывается следующими параметрами:
· главным и добавочным максимумами (лепестками);
· шириной главного максимума Da0, определяемой углом между направлениями нулевого излучения (или по уровню 0,707, т.е. по уровню соответствующему 50 % излучаемой мощности);
· отношением значений уровней добавочных максимумов к главному.
 Лепестковый характер диаграммы Н связан с интерференцией полей, излучаемых отдельными элементами. В главном лепестке направленного преобразователя сосредоточено свыше 90% всей излучаемой мощности. Наименее направленными излучателями являются вибратор Герца (диполь), представляющий собой короткий кусок провода с емкостями на концах и рамка (магнитный диполь) - виток провода, диаметр которого мал по сравнению с l. Их диаграммы Н имеют форму тороида (рис. 5.4). Н реальных излучателей (и приемников) в горизонтальной и вертикальной плоскостях различаются. Так, в радиолокационных системах сантиметрового диапазона диаграмму Н делают узкой в горизонтальной плоскости и широкой (либо состоящей из множества узких лучей) - в вертикальной.
Лепестковый характер диаграммы Н связан с интерференцией полей, излучаемых отдельными элементами. В главном лепестке направленного преобразователя сосредоточено свыше 90% всей излучаемой мощности. Наименее направленными излучателями являются вибратор Герца (диполь), представляющий собой короткий кусок провода с емкостями на концах и рамка (магнитный диполь) - виток провода, диаметр которого мал по сравнению с l. Их диаграммы Н имеют форму тороида (рис. 5.4). Н реальных излучателей (и приемников) в горизонтальной и вертикальной плоскостях различаются. Так, в радиолокационных системах сантиметрового диапазона диаграмму Н делают узкой в горизонтальной плоскости и широкой (либо состоящей из множества узких лучей) - в вертикальной.
 Коэффициент концентрации (называемый также коэффициентом направленного действия - КНД), характеризует меру концентрации излучаемой энергии вдоль некоторого направления (обычно направления главного максимума диаграммы Н). КНД Kнд определяется как отношение мощности излучения, в направлении главного максимума W^, к мощности гипотетического «ненаправленного» излучателя с такой же излучаемой мощностью W на том же расстоянии l:
Коэффициент концентрации (называемый также коэффициентом направленного действия - КНД), характеризует меру концентрации излучаемой энергии вдоль некоторого направления (обычно направления главного максимума диаграммы Н). КНД Kнд определяется как отношение мощности излучения, в направлении главного максимума W^, к мощности гипотетического «ненаправленного» излучателя с такой же излучаемой мощностью W на том же расстоянии l:
Kнд = W^/W
«Ненаправленным» считается излучатель с диаграммой Н типа шара. Его мощность W1 в единице телесного угла равна W/4p. Тогда Kнд = 4p W^/W. Для простейших преобразователей ЛИС (диполей) Kнд = 1,5.
Н зависит от волнового размера излучателя dхар/l (отношения его характерных размеров, обычно длины или диаметра к длине волны). С увеличением dхар/l уменьшается ширина диаграммы Н и возрастает коэффициент концентрации (рис. 5.5б). В современных ЛИС, преобразователи которых состоят из большого числа элементарных диполей (так называемые антенные решетки), существует возможность управления диаграммой Н. Это делается путем соответствующего амплитудно-фазового распределения излучения по поверхности преобразователя (рис. 5.5а). Так, например, амплитудные распределения, характеризуемые спадом амплитуды излучения к краям излучающей поверхности, расширяют основной максимум диаграммы Н и уменьшают добавочные, а распределения с возрастанием амплитуды к краям, наоборот, уменьшают ширину главного максимума и увеличивают уровень добавочных (рис. 5.5а). Использование принципов управления фазой излучения позволяет поворачивать главный максимум диаграммы Н. В частности, при линейной зависимости фазы от координаты излучателя осуществляется сканирование среды излучения.
В ЛИС довольно часто применяются обратимые преобразователи. Их характеристики Н в режимах приема и излучения будут одинаковы, если обеспечивается постоянство амплитудного распределения и внутреннего механического сопротивления преобразователя.
5.1.2. Модуляция и детектирование сигналов
Важнейшим принципом передачи информации в ЛИС является модуляция, под которой понимается изменение по заданному закону во времени некоторых параметров, характеризующих излучение. Обычно такими параметрами являются характеристики сигнала - его амплитуда, частота, фаза и т.д. Поскольку в ЛИС информация переносится волновыми процессами, то говорят о модуляции колебаний (МК). МК называется вариация каких-либо параметров периодических колебаний, медленная по сравнению с самими колебаниями. Колебание более высокой частоты, параметры которого изменяются сигналом, называется несущим. Разделяют непрерывную и импульсную модуляцию. В первом случае, модулирующий сигнал изменяет амплитуду, частоту или фазу несущего колебания, во втором - к указанным добавляются вариации ширины импульсов, а также импульсно-кодовая модуляция. Использование МК позволяет не только увеличить дальность и точность локации, но и помехозащищенность канала связи.
В живой природе при локации используется как непрерывная, так и импульсная МК. Первый тип характерен для летучих мышей, второй - для наземных млекопитающих. Для обоих случаев характерна частотная модуляция, причем закон изменения частоты довольно сложен и определяется конкретной задачей. Так, гладконосая летучая мышь в обычных условиях излучает ультразвуковые сигналы частотой ~ 75 кГц, которая в конце посылки за 2 ... 5 мс линейно убывает до 45 кГц. У большого подковоноса тон постоянной частоты 80 ... 82 кГц длится в течение 40 ... 100 мс, но в конце сигнала его частота за 1 ... 3 мс падает до ~ 60 кГц (рис. 5.6а). Локационные сигналы дельфинов имеют очень малую длительность ~ 0,04 ... 0,1 мс и широкий спектр 30 ... 150 кГц Наземные млекопитающие (например, землеройки) излучают сигналы импульсного типа длительностью 0,1 ... 3,5 мс с наивысшей частотой 20 кГц. Слуховая (приемная) система животных, использующих локацию, обладает выраженными резонансными свойствами (рис.5.6б).
 При любом способе непрерывной МК скорость изменения амплитуды, частоты или фазы должна быть достаточно мала, чтобы за один период несущего сигнала Tн, модулирующий сигнал почти не изменился (рис. 5.7). Обычно принимают Tм > 5Tн. Частота несущего сигнала при импульсной модуляции должна быть, в соответствии с теоремой Шеннона, по крайней мере, вдвое выше наибольшей частоты модулирующего сигнала.
При любом способе непрерывной МК скорость изменения амплитуды, частоты или фазы должна быть достаточно мала, чтобы за один период несущего сигнала Tн, модулирующий сигнал почти не изменился (рис. 5.7). Обычно принимают Tм > 5Tн. Частота несущего сигнала при импульсной модуляции должна быть, в соответствии с теоремой Шеннона, по крайней мере, вдвое выше наибольшей частоты модулирующего сигнала.
Сложение сигналов с близкими частотами вызывает биения, которые также могут рассматриваться как МК.
Наиболее распространенным способом непрерывной МК является модуляция амплитуды колебаний высокой частоты. В общем случае, амплитудно-модулированное (АМ) колебание имеет вид:
u (t) = U(t) cos wt
где w = 1/Tн = 2pf - круговая частота несущего (высокочастотного) колебания, U(t) - медленно изменяющаяся амплитуда модулирующего колебания, для которой справедливо неравенство:  . АМ является линейной, если изменение амплитуды несущего колебания u(t) пропорционально модулирующему сигналу, т.е. когда u(t) = u0 [1+ m U(t)/Umax(t)]. Здесь U(t) и Umax(t) - модулирующее колебание и его максимальное значение соответственно, u0 - амплитуда несущего колебания, m - глубина модуляции, характеризующая степень изменения амплитуды:
. АМ является линейной, если изменение амплитуды несущего колебания u(t) пропорционально модулирующему сигналу, т.е. когда u(t) = u0 [1+ m U(t)/Umax(t)]. Здесь U(t) и Umax(t) - модулирующее колебание и его максимальное значение соответственно, u0 - амплитуда несущего колебания, m - глубина модуляции, характеризующая степень изменения амплитуды:

В простейшем случае, когда модулирующее колебание является гармоническим U(t)/Umax(t) = cos Wt получим (рис. 5.8а):
u(t) = u0 (1 + m cos Wt) cos (wt + j),
где j - начальная фаза исходного колебания, W - частота модуляции. Частота модуляции характеризует скорость изменения амплитуды: W = 1/Tм << w = 1/Tн.

Для определения спектра сигнала можно пренебречь величиной j. Тогда исходное выражение АМ сигнала приводится к следующему виду:

Как следует из этой зависимости, АМ сигнал состоит из трех гармонических колебаний с частотами: несущей - w и двумя боковыми (или спутниками) w-W и w+W (рис. б). Амплитуда несущего колебания u0 не изменяется, в то время как амплитуда каждого из спутников равна m u0/2. Поскольку амплитуды спектральных линий относятся как 1:m/2:m/2, то, соотношение мощностей, переносимых боковыми частотами имеет вид 1:(m/2)2:(m/2)2. Следовательно, при m = 1, мощность каждой из боковых частот составит лишь 25% мощности несущей. Чем больше глубина модуляции, тем больше мощность переносимая боковыми частотами, т.е. лучше отношение сигнал/шум. Однако практически m не бывает более 0,6 …0,8, поскольку в этом случае резко возрастают искажения при детектировании АМ сигнала. Ширина спектра B при АМ составляет 2W, что соответствует десяткам килогерц (при передаче звука) и десяткам мегагерц (при передаче телевизионного сигнала).
В общем случае, модулирующее колебание U(t) имеет сложный спектр. Тогда, по обе стороны от несущей частоты образуются две полосы боковых частот. Если АМ линейная, то левая полоса боковых частот в точности повторяет форму модулирующего сигнала, а правая является ее зеркальным отражением (рис.5.8б - пунктир). Анализ спектра сигнала свидетельствует, что полезную информацию можно восстановить по любой боковой полосе. Для этого в схемах детектирования используется подавление несущей частоты и одного из спутников.
Достоинством АМ является простота решений и малая ширина спектра передаваемого сигнала. В то же время, передача АМ сигналов не экономична, а мощность передаваемого сигнала зависит от m. Так, при мощности несущего колебания 500 Вт, мощность собственно сигнала даже при m = 1 составит 125 Вт. Однако, как уже отмечалось, для уменьшения искажений значение m не превышает 0,8, и, следовательно, реальная полезная мощность еще ниже.
При частотной МК (ЧМ или FM в зарубежной литературе) модулирующий сигнал U(t) вызывает изменение мгновенных значений частоты w, не влияя на амплитуду колебаний (рис. 5.9). Характерным примером является известный скрипичный прием «вибрато» - качание пальца на струне изменяет ее длину и, тем самым, высоту звука. В большинстве случаев используется линейная ЧМ, при которой изменения частоты пропорциональны амплитуде модулирующего сигнала.
 В простейшем случае модуляции синусоидальным сигналом, т.е. когда модулирующий сигнал U(t) гармонический - U(t) = Umax(t) cos Wt несущая частота w будет меняться по закону:
В простейшем случае модуляции синусоидальным сигналом, т.е. когда модулирующий сигнал U(t) гармонический - U(t) = Umax(t) cos Wt несущая частота w будет меняться по закону:
w(t) = w0+Dw cos Wt,
где cos Wt определяет форму модулирующего сигнала, а Dw представляет собой амплитуду отклонения частоты от несущей. Параметр Dw, называемый девиацией частоты, не зависит от частоты сигнала и соответствует глубине модуляции при АМ.
Полоса частот ЧМ сигнала определяется значением индекса ЧМ, равного b = Dw/W. При малых b (т.е. когда b << 1) ширина спектра практически не зависит от b и равна 2W (рис. 5.10а). В этом случае, ЧМ, так же как и АМ колебание, состоит из сигнала несущей частоты w0 и двух спутников с частотами w0 ± W. ЧМ сигнал описывается приближенным соотношением:
u (t) » u0 (cos wt + b cos Wt sin wt)
Следовательно, при малых b полосы частот, занимаемые АМ и ЧМ сигналами, одинаковы. Однако, как правило, в ЧМ b >> 1 и, следовательно, спектр сигнала значительно расширяется. Кроме колебаний с частотами w0 ± W, появляются колебания, частоты которых равны w0 ± 2W ... w0 ± nW (рис. 5.10б). Ширину спектра B в этом случае определяют из приблизительного выражения B » 2W(1+b).
 В большинстве случаев, и сам модулирующий сигнал не является гармоническим, а представляет собой спектр частот. Для примера рассмотрим передачу ЧМ сигналов звукового диапазона (W = 20 Гц … 20 кГц) на несущей частоте w = 50 МГц. Пусть при изменении амплитуды модулирующего сигнала от нуля до максимума (например, в пределах ± 1В), w будет меняется в диапазоне 49,9 … 50,1 МГц. Тогда Dw составит 0,2 МГц или 200 кГц. Индекс ЧМ b (для верхней частоты передаваемого сигнала Wmax = 20 кГц) равен 10, и, следовательно, B = 440 кГц. Ясно, что индекс ЧМ имеет разные значения, зависящие от частоты модулирующего сигнала W. (В области нижних звуковых частот для Wmin = 20 Гц при тех же условиях b = 104). На практике в каналах ЧМ связи значения b стандартизируют: bmax = Dwmax/Wmax. Так, при передаче звука в телевизионном стандарте максимальная девиация несущей частоты звукового сопровождения Dwmax = 50 кГц, а максимальная модулирующая частота Wmax = 15 кГц. Поэтому, bmax = 3,33.
В большинстве случаев, и сам модулирующий сигнал не является гармоническим, а представляет собой спектр частот. Для примера рассмотрим передачу ЧМ сигналов звукового диапазона (W = 20 Гц … 20 кГц) на несущей частоте w = 50 МГц. Пусть при изменении амплитуды модулирующего сигнала от нуля до максимума (например, в пределах ± 1В), w будет меняется в диапазоне 49,9 … 50,1 МГц. Тогда Dw составит 0,2 МГц или 200 кГц. Индекс ЧМ b (для верхней частоты передаваемого сигнала Wmax = 20 кГц) равен 10, и, следовательно, B = 440 кГц. Ясно, что индекс ЧМ имеет разные значения, зависящие от частоты модулирующего сигнала W. (В области нижних звуковых частот для Wmin = 20 Гц при тех же условиях b = 104). На практике в каналах ЧМ связи значения b стандартизируют: bmax = Dwmax/Wmax. Так, при передаче звука в телевизионном стандарте максимальная девиация несущей частоты звукового сопровождения Dwmax = 50 кГц, а максимальная модулирующая частота Wmax = 15 кГц. Поэтому, bmax = 3,33.
Амплитуда спектральной линии несущей частоты w0 в ЧМ (в отличие от АМ) зависит от амплитуды модулирующего сигнала U и при b = 2,4; 5,5; 8,7; 11,8, 14,9 ... обращается в нуль. Поскольку ширина спектра при ЧМ намного больше, чем при АМ, ее используют в диапазоне метровых волн, соответствующем частотам от 50 МГц.
Главным достоинством ЧМ является высокая помехоустойчивость. Она обусловлена, главным образом тем, что большинство помех имеют амплитудный характер, и, следовательно, добавляется к сигналу. Кроме того, наличие дополнительных линий в спектре сигнала, также повышает надежность связи. Другим достоинством является постоянство амплитуды сигнала, и, как следствие, выходной мощности передатчика.
Фазовой модуляцией (ФМ) называется способ МК, при котором фаза колебаний высокой частоты изменяется в соответствии с величиной низкочастотного модулирующего сигнала. При ФМ несущей частоты гармоническим колебанием sin Wt модулированное колебание может быть записано в виде:
u (t) = u0 cos (w0t + Dj sin Wt),
где Dj - максимальное отклонение фазы (индекс модуляции). Частота колебаний w не постоянна, она определяется производной аргумента косинуса:
w (t) = w0 + Dj W cos Wt
ФМ тесно связана с ЧМ. При переменной скорости изменения фазы Dj переменной оказывается и частота колебаний Dw = Dj W. Если модулирующий сигнал синусоидальный, то форма модулированных колебаний и их спектральный состав для ЧМ и ФМ одинаковы. При негармоническом модулирующем сигнале законы изменения фазы и частоты колебаний оказываются несколько различными. Другим отличием ФМ от ЧМ является зависимость девиации частоты Dw от частоты модулирующего колебания Dw = Dj W. Для ФМ с небольшим Dj спектр боковых частот оказывается практически таким же, как и при АМ.
Проведенный обзор способов непрерывной МК позволяет сделать вывод о том, что качественное различие существует лишь между АМ с одной стороны и ЧМ и ФМ с другой. Для всякого закона изменения частоты всегда может быть указан эквивалентный закон изменения фазы. В отличие от АМ глубина частотной и фазовой МК не изменяет средней мощности модулированного колебания, в то время как полоса боковых частот увеличивается с возрастанием глубины МК.
 В качестве переносчика информации может использоваться не только гармоническое колебание, но и последовательность импульсов, каждый из которых представляет собой цуг колебаний несущей высокой частоты (рис.5.11б). Первым процессом в системах с импульсной модуляцией (ИМ) является генерация несущего колебания в виде последовательности периодически повторяющихся импульсов. Частота повторения импульсов, называемая частотой дискретизации fд = 1/Tд должна зависеть от частотного спектра передаваемого сигнала и быть, по крайней мере, вдвое выше наибольшей частотной составляющей информации fс max (fд ³2 fс max). Полученная импульсная последовательность используется для создания импульсов, которые модулируются передаваемым сигналом. В ИМ наряду с fд и Tд различают длительность импульсов t, а также их скважность q = Tд/t. В ЛИС применяется ИМ с импульсами прямоугольной или колоколообразной формы с t = 10-5 … 10-9 с и q = 1 … 103.
В качестве переносчика информации может использоваться не только гармоническое колебание, но и последовательность импульсов, каждый из которых представляет собой цуг колебаний несущей высокой частоты (рис.5.11б). Первым процессом в системах с импульсной модуляцией (ИМ) является генерация несущего колебания в виде последовательности периодически повторяющихся импульсов. Частота повторения импульсов, называемая частотой дискретизации fд = 1/Tд должна зависеть от частотного спектра передаваемого сигнала и быть, по крайней мере, вдвое выше наибольшей частотной составляющей информации fс max (fд ³2 fс max). Полученная импульсная последовательность используется для создания импульсов, которые модулируются передаваемым сигналом. В ИМ наряду с fд и Tд различают длительность импульсов t, а также их скважность q = Tд/t. В ЛИС применяется ИМ с импульсами прямоугольной или колоколообразной формы с t = 10-5 … 10-9 с и q = 1 … 103.
Импульсы имеют гораздо больше варьируемых параметров, по сравнению с гармоническим колебанием, поэтому и видов импульсной модуляции (ИМ) в принципе может быть гораздо больше. Периодическая последовательность импульсов определяется четырьмя основными параметрами: амплитудой, частотой следования, длительностью (шириной) и фазой.
В соответствии с этим возможны следующие типы ИМ: амплитудно-, частотно-, широтно- ( рис 5.11а) и фазоимпульсная МК. Наиболее просто передача и прием осуществляется при амплитудно-импульсной МК. Опыт показывает, что детектирование получается удовлетворительным, если на один период передаваемого сигнала приходится не менее 2 - 3 импульсов. Так, для разборчивого воспроизведения речи достаточно передавать спектр частот 100 … 3000 Гц, что требует обеспечения частоты посылок (частоты дискретизации fд) в пределах 8 … 10 кГц. Если длительность импульса t ограничить величиной 1 мкс, т.е. получить скважность q ~ 100, то можно организовать несколько информационных каналов в рамках одного частотного. Этот подход, получивший название временной селекции применяется в многоканальных системах связи.
 К недостаткам ИМ по сравнению с непрерывной МК относятся худшее качество восстановления информации (при детектировании), широкая полоса частот, требующая работы в диапазоне СВЧ, сложность технической реализации. Лучшими показателями помехоустойчивости обладают системы фазоимпульсной МК, а также кодоимпульсная МК, основанная на одновременном использовании принципов дискретизации, временного квантования и кодирования. Эти типы ИМ широко распространены в системах связи. На рис. 5.12 представлены примеры формирования АИМ (графики а - в) и ФИМ (графики г - ж) сигналов. В первом случае показаны сигналы на выходе излучателя (рис. 5.12в), во втором - сигналы на входе приемника (рис. 5.12е) и на выходе детектора (рис. 5.12ж).
К недостаткам ИМ по сравнению с непрерывной МК относятся худшее качество восстановления информации (при детектировании), широкая полоса частот, требующая работы в диапазоне СВЧ, сложность технической реализации. Лучшими показателями помехоустойчивости обладают системы фазоимпульсной МК, а также кодоимпульсная МК, основанная на одновременном использовании принципов дискретизации, временного квантования и кодирования. Эти типы ИМ широко распространены в системах связи. На рис. 5.12 представлены примеры формирования АИМ (графики а - в) и ФИМ (графики г - ж) сигналов. В первом случае показаны сигналы на выходе излучателя (рис. 5.12в), во втором - сигналы на входе приемника (рис. 5.12е) и на выходе детектора (рис. 5.12ж).
Для повышения надежности связи широко применяются принципы кодовой модуляции. В частности, еще в первых модемах использовался метод FSK (Frequency Shift Keing) - вариант частотно-кодовой модуляции. В соответствии с ним в режиме передачи частота 1070 Гц соответствовала логическому «0», 1270 Гц - логической «1». При приеме «0» соответствовал сигналу с частотой 2025 Гц, а «1» - 2225.
Для более скоростных систем позднее был разработан метод PSK (Phase Shift Keing), являвшийся вариантом фазо-кодовой модуляции. В нем используются только две частоты: для передачи данных -2400 Гц, для приема - 1200 Гц. Сами данные передаются парами бит, при этом кодировка осуществляется путем сдвига фазы сигнала. Используются следующие сдвиги фазы для кодировки: 0о - 00, 90о - 01, 180о - 10, 270о - 11.
Также разработаны системы, применяющие амплитудно-импульсную модуляцию. Во всех случаях ИМ необходимо применять специальные меры для обеспечения надежности передачи информации. С этой целью, а также для увеличения скорости связи в модемах реализован способ коррекции, получивший название MNP (Microcom Networking Protocol), включающий процедуру сжатия данных. Принцип работы MNP-модема заключается в использовании при передаче блоков переменной длины.
Подведем некоторые итоги. Эффективность ЛИС, а именно, дальность, точность, помехозащищенность передачи зависит от направленности излучателя и приемника, несущей частоты сигнала, а также используемого способа МК. В большинстве случаев увеличение несущей частоты позволяет повысить разрешающую способность ЛИС при обнаружении объектов и определении их скоростей, уменьшая при этом дальность локации за счет затухания волн. Для увеличения надежности локационного канала связи целесообразно использовать фазоимпульсную МК, а для уменьшения искажений сигнала - ЧМ.
В заключении рассмотрим некоторые основные принципы демодуляции сигналов.
К настоящему времени разработано большое количество схем, позволяющих выделять полезную информацию из модулированного сигнала. Наиболее распространенные схемы основаны на использовании методов амплитудного детектирования и частотной демодуляции. Схемы первого типа выделяют низкочастотную составляющую из АМ, второго - из ЧМ сигналов.
Основными элементами амплитудного детектора (рис. 5.13а) являются диод и RC-контур (фильтр низкой частоты). На его вход подается АМ сигнал вида:
uвх = u0 (1 + m cos Wt) cos (wt + j),
Упростим это выражение
uвх = u0 (1+ Dm) cos wt
 Здесь Dm = m cos Wt, j = 0. Соотношение элементов RC-контура должно удовлетворять зависимости:
Здесь Dm = m cos Wt, j = 0. Соотношение элементов RC-контура должно удовлетворять зависимости: 
Тогда, на выходе схемы сигнал uвых определяется выражением: uвых = h u0 (1 + Dm), где h - чувствительность в динамическом режиме (эффективность детектирования) 0 < h < 1. Постоянная составляющая детектируемого напряжения h u0 устраняется с помощью фильтра верхних частот Сп (рис. 5.13б).
Одной из схем частотной демодуляции является частотный дискриминатор («детектор наклона»), принцип работы которого основан на пропорциональном изменении амплитуды напряжения на колебательном контуре при вариациях мгновенных значений частоты модулированных колебаний w(t).
 При отклонениях несущей частоты w0 модулированных колебаний от резонансной частоты контура wк изменяется амплитуда выходного сигнала uвых, причем влияние модулированных колебаний тем слабее, чем острее резонансная кривая (рис. 5.14). Резонансные свойства контура зависят от его добротности Q, определяемой выражением:
При отклонениях несущей частоты w0 модулированных колебаний от резонансной частоты контура wк изменяется амплитуда выходного сигнала uвых, причем влияние модулированных колебаний тем слабее, чем острее резонансная кривая (рис. 5.14). Резонансные свойства контура зависят от его добротности Q, определяемой выражением:

Недостатком схемы является ее существенная нелинейность. Для улучшения линейности характеристики используются двухконтурные дискриминаторы, а также «дробные детекторы». В первых - в отсутствии модуляции, когда частота входного сигнала совпадает с резонансной частотой контуров, напряжение на одном из них сдвинуто по фазе на 900 относительно напряжения другого. В «дробных детекторах» - линейность достигается использованием диодной схемы.
5.2. Электромагнитные локационные системы
Принцип работы электромагнитных локационных систем (ЭЛС) основан на взаимодействии электромагнитного поля преобразователя с металлическими объектами. ЭЛС чаще всего выполняют функции информационных средств параметрического контроля и дефектокопов, реже - измерителей расстояний, вибраций и др. В качестве ЧЭ ЭЛС используются дроссели и трансформаторы различной формы.
В зависимости от типа преобразователя и частоты магнитного поля ЭЛС разделяются на 3 группы:
·  магнитные ЛС (индуктивные и индукционные) - в них применяется постоянное или низкочастотное магнитное поле;
магнитные ЛС (индуктивные и индукционные) - в них применяется постоянное или низкочастотное магнитное поле;
· вихретоковые - возбуждение осуществляется переменным магнитным полем частотой ~ 2 102 ... 5 106 Гц;
· радиоволновые - основаны на использовании электромагнитных излучений СВЧ диапазона (длина волны ~ 0,1 ... 10 мм).
5.2.1. Магнитные локационные системы
Магнитные ЛС широко используются в дефектоскопии для выявления нарушений сплошности предметов из ферромагнитных материалов, обнаружения мелких трещин (размером 3 … 10 мкм) на их поверхности, определения толщины немагнитных покрытий на магнитной основе и толщины стенок изделий из магнитных и немагнитных материалов. Принцип магнитной дефектоскопии иллюстрирует рис.5.16. Если ферромагнитный объект помещен в однородное магнитное поле, то при отсутствии дефектов в материале объекта  магнитный поток Ф практически не выходит за пределы объекта, т.к. магнитная индукция в воздухе Bв в m раз меньше, чем в металле Bм: Bм = m Bв. Следовательно, магнитное сопротивление Rm, например, трещины шириной hд будет намного выше, чем участка материала ферромагнетика. Использование магнитных ЛС в задачах дефектоскопии требует создания достаточно высоких уровней магнитной индукции в материале объекта. Поэтому, определяющее значение приобретают собственно магнитные характеристики объекта, для оценки которых, наряду с рассмотренным ранее параметром - величиной остаточной индукции Bост, используются также намагниченность X и магнитная восприимчивость материала V. Намагниченность представляет собой векторную величину, характеризующую состояние вещества при воздействии на него магнитного поля напряженностью H:
магнитный поток Ф практически не выходит за пределы объекта, т.к. магнитная индукция в воздухе Bв в m раз меньше, чем в металле Bм: Bм = m Bв. Следовательно, магнитное сопротивление Rm, например, трещины шириной hд будет намного выше, чем участка материала ферромагнетика. Использование магнитных ЛС в задачах дефектоскопии требует создания достаточно высоких уровней магнитной индукции в материале объекта. Поэтому, определяющее значение приобретают собственно магнитные характеристики объекта, для оценки которых, наряду с рассмотренным ранее параметром - величиной остаточной индукции Bост, используются также намагниченность X и магнитная восприимчивость материала V. Намагниченность представляет собой векторную величину, характеризующую состояние вещества при воздействии на него магнитного поля напряженностью H:

где V - объем вещества, mm - элементарный магнитный момент. Индукция в намагниченном материале определяется формулой: Bм = m0 (H + X), где m0 = 4p 10-7 Гн/м. Напомним, что остаточной индукцией Bост называется та ее часть, которая остается в намагниченном до насыщения материале после снятия с него магнитного поля.
Второй важной характеристикой вещества (магнетика), учитывающей его способность намагничиваться в магнитном поле является магнитная восприимчивость V, равная: V = X/H. Для всех металлов V зависит от m: m = 1+ V, причем для диамагнетиков V < 0, а для парамагнетиков V > 0. Поскольку, в обоих случаях m не зависит от напряженности магнитного поля H и мало отличается от единицы, значения магнитной восприимчивости для этих материалов весьма малы. V ~ 10-6 … 10-4 - для диамагнетиков, и 10-7 … 10-6 - для парамагнетиков.
Магнитные дефектоскопы позволяют обнаруживать подповерхностные трещины и раковины на глубине до 20 мм.
 Другой областью применения магнитных ЛС является измерение зазоров в магнитных цепях. В системах этого типа используются как индуктивные, так и индукционные датчики (рис. 5.15). В первых - вариации магнитного сопротивления зазора Rm вызывает изменение индуктивности катушки L, во втором под действием того же фактора изменяется ЭДС индукции Е. В простейших магнитных ЛС возбуждение катушки внешним источником питания не производится; при этом выходной сигнал Uс возникает только при движении объекта относительно датчика. На этом принципе построены магнитные головки разных типов, использующиеся в системах магнитной записи сигналов (рис. 5.15а). Для повышения эффективности магнитных головок их сердечник выполняется из материала с большой магнитной проницаемостью (феррита, пермаллоя и др.). В системах измерения зазоров или малых расстояний (рис. 5.15б) головка содержит две катушки - первичная запитывается от внешнего источника питания Uп, а вторая является сигнальной.
Другой областью применения магнитных ЛС является измерение зазоров в магнитных цепях. В системах этого типа используются как индуктивные, так и индукционные датчики (рис. 5.15). В первых - вариации магнитного сопротивления зазора Rm вызывает изменение индуктивности катушки L, во втором под действием того же фактора изменяется ЭДС индукции Е. В простейших магнитных ЛС возбуждение катушки внешним источником питания не производится; при этом выходной сигнал Uс возникает только при движении объекта относительно датчика. На этом принципе построены магнитные головки разных типов, использующиеся в системах магнитной записи сигналов (рис. 5.15а). Для повышения эффективности магнитных головок их сердечник выполняется из материала с большой магнитной проницаемостью (феррита, пермаллоя и др.). В системах измерения зазоров или малых расстояний (рис. 5.15б) головка содержит две катушки - первичная запитывается от внешнего источника питания Uп, а вторая является сигнальной.
Пример использования индукционной головки наведения для управления подвижным мобильным средством приведен на рис. 5.17а. Головка была включена в состав навигационной системы транспортной тележки, перемещающейся внутри цеха вдоль уложенных в подповерхностном слое металлических шин. Катушка возбуждения создает высокочастотное электромагнитное поле, которое на поверхности металлической шины наводит соответствующее магнитное поле, под действием которого во вторичных (сигнальных) катушках генерируются переменные напряжения. Обмотки катушек соединены дифференциально, в результате чего их суммарный сигнал соответствует разности напряжений в каждой катушке. Угловое рассогласование a вызывает на выходе фазочувствительного выпрямителя ФЧВ сигнал Uвых, амплитуда которого пропорциональна напряжению Uдиф, а знак соответствует фазе a (рис. 5.17б).
 Магнитные ЛС на базе индуктивных датчиков расстояния широко используются в робототехнике. На рис. 5.18 представлена функция преобразования и схема включения индуктивного датчика в контур управления сварочным роботом. Выходные сигналы поступают в регулятор привода, который перемещает горелку по соответствующей оси до тех пор, пока не будет достигнуто требуемое расстояние Lраб между электродом и поверхностью заготовки. Это расстояние, определяемое эмпирически, составляет в среднем 6, 4 и 3 мм соответственно для черных металлов, алюминия и меди. Точность отслеживания траектории достигает ± 0,4 мм.
Магнитные ЛС на базе индуктивных датчиков расстояния широко используются в робототехнике. На рис. 5.18 представлена функция преобразования и схема включения индуктивного датчика в контур управления сварочным роботом. Выходные сигналы поступают в регулятор привода, который перемещает горелку по соответствующей оси до тех пор, пока не будет достигнуто требуемое расстояние Lраб между электродом и поверхностью заготовки. Это расстояние, определяемое эмпирически, составляет в среднем 6, 4 и 3 мм соответственно для черных металлов, алюминия и меди. Точность отслеживания траектории достигает ± 0,4 мм.
В качестве первичных преобразователей магнитных ЛС также служат феррозонды (полемеры), преобразователи Холла и др.
Магнитные ЛС являются основными средствами неразрушающего контроля в литьевом и прокатном производстве. К их достоинствам относятся: простота конструкций, большая глубина зоны контроля, высокая надежность (на показания датчика практически не влияют климатические факторы, загрязнения поверхности). Недостатками магнитных ЛС являются низкая разрешающая способность и нелинейность функции преобразования.
5.2.2. Вихретоковые локационные системы
 В настоящее время весьма распространены ЭЛС, использующие вихретоковые первичные преобразователи. Первое упоминание о датчике на основе вихревых токов (ВТ), по-видимому, датируется 1879 г., когда англичанин Д. Хьюз построил прибор для сравнения параметров металлических объектов. Системы этого типа работают в условиях активного воздействия внешней среды (при значительных перепадах температур и влажности, в агрессивных средах и т.д.), на транспорте, в прокатном и сварочном производстве. ВТ ЛС нашли применение в задачах измерения геометрических параметров быстропротекающих процессов движения.
В настоящее время весьма распространены ЭЛС, использующие вихретоковые первичные преобразователи. Первое упоминание о датчике на основе вихревых токов (ВТ), по-видимому, датируется 1879 г., когда англичанин Д. Хьюз построил прибор для сравнения параметров металлических объектов. Системы этого типа работают в условиях активного воздействия внешней среды (при значительных перепадах температур и влажности, в агрессивных средах и т.д.), на транспорте, в прокатном и сварочном производстве. ВТ ЛС нашли применение в задачах измерения геометрических параметров быстропротекающих процессов движения.
Собственно ВТ метод основан на взаимодействии внешнего магнитного поля с электромагнитным полем ВТ, наводимых возбуждающей катушкой в любом электропроводящем объекте. Принцип формирования ВТ, открытый в 1825 г. Д. Араго и развитый впоследствии его учеником Л. Фуко представлен на рис. 5.19. Синусоидальный или импульсный ток, действующий в катушке возбуждения датчика, создает электромагнитное поле, которое вызывает ВТ в объекте. Электромагнитное поле этих токов, в свою очередь, воздействует на катушки преобразователя, наводя в них ЭДС или изменяя их полное электрическое сопротивление. (В датчике может использоваться одна катушка или две - как на рисунке). Сила ВТ, возбужденных в изделии I зависит от частоты переменного тока, электрической проводимости 1/r, абсолютной магнитной проницаемости mа = m m0 материала изделия, а также величины зазора. ВТ подчиняются второму уравнению Максвелла: rot I = - 1/r (dB/dt). Плотность ВТ зависит от геометрических и электромагнитных параметров объекта, а также от взаимного расположения ВТ датчика и объекта. Она максимальна на поверхности объекта в контуре, диаметр которого близок к диаметру возбуждающей катушки. В отличие от индуктивных ЭЛС, системы на базе ВТ пригодны для работы с немагнитными материалами.
 В настоящее время выпускается большое количество различных ВТ датчиков, отличающихся как назначением, так и конструктивными решениями. Так, только фирма «Institut F. Forster», Германия предлагает более 800 вариантов ВТ датчиков, размером от долей мм до 0,5 м в диаметре и массой от граммов до сотен килограмм. Принятым классификационным признаком является рабочее положение обмоток датчика относительно объекта контроля [ ]. В соответствии с ним преобразователи делятся на три группы: проходные, накладные и комбинированные.
В настоящее время выпускается большое количество различных ВТ датчиков, отличающихся как назначением, так и конструктивными решениями. Так, только фирма «Institut F. Forster», Германия предлагает более 800 вариантов ВТ датчиков, размером от долей мм до 0,5 м в диаметре и массой от граммов до сотен килограмм. Принятым классификационным признаком является рабочее положение обмоток датчика относительно объекта контроля [ ]. В соответствии с ним преобразователи делятся на три группы: проходные, накладные и комбинированные.
Наиболее распространены накладные ВТ датчики, подводимые к поверхности контролируемого объекта. Большинство ВТ ЛС строятся на базе датчиков накладного типа с двумя катушками - возбуждающей и сигнальной. При расположении катушек преобразователя возникает та же проблема, что и в других индукционных системах: с одной стороны ЭДС, наводимая в сигнальной катушке должна быть максимальной, а с другой - взаимовлияние катушек необходимо свести к минимуму. Некоторые популярные схемы расположения катушек представлены на рис. 5.20. При коаксиальном расположении выходной сигнал в сигнальной катушке образуется совместным действием потока возбуждения и ВТ объекта контроля, что требует компенсации постоянной составляющей, обусловленной катушкой возбуждения. При ортогональном положении катушек ток в сигнальной наводится только ВТ, однако, и уровень выходного сигнала в этом случае ниже, чем в первом.
Расчет ВТ достаточно сложен и в большинстве случаев пользуются эмпирическими зависимостями, полученными для разных частных случаев. Так, например, для ВТ ЛС с накладным преобразователем глубина проникновения ВТ d определяется приближенным выражением:

Здесь w = 2pf - круговая частота тока возбуждения. Размерности r и mа = m m0 - составляют соответственно (Ом/м) и (Гн/м). Данное выражение дает завышенную оценку глубины проникновения ВТ, и для более точных измерений в расчет вводится обобщенный параметр b, учитывающий размеры (радиус R) катушки возбуждения ВТ [ ]:
 .
.
Следовательно,  . Значение d тем ближе к реальному, чем больше величина параметра b и, в первую очередь, размер катушки возбуждения. При работе в диапазоне частот возбуждения 0, 1 … 10 кГц, значения d для большинства металлов не превышает ~ 0,5 ... 5 мм и уменьшается с частотой.
. Значение d тем ближе к реальному, чем больше величина параметра b и, в первую очередь, размер катушки возбуждения. При работе в диапазоне частот возбуждения 0, 1 … 10 кГц, значения d для большинства металлов не превышает ~ 0,5 ... 5 мм и уменьшается с частотой.
В дефектоскопии с помощью ВТ удается обнаружить трещины наружного и внутреннего залегания длиной 1 ... 2 мм и глубиной 0,1 ... 0,3 мм, полости, раковины залеганием до 6 мм, неметаллические включения и т.д. Вихретоковые ЭЛС позволяют измерять толщину покрытий в пределах 0,001 ... 1,0 мм. Для увеличения глубины проникновения ВТ применяют специальные меры. Например, уменьшение mа материала, путем создания в нем магнитного насыщения, увеличивает d до 10 мм.

 Существенной особенностью ВТ ЛС является их многопараметричность, т.к. ЭДС преобразователя зависит от многих характеристик объекта контроля и окружающей среды, неявно влияющих на выходной сигнал. Это обстоятельство определяет как достоинства, так и недостатки ВТ измерений. Для компенсации интегрального влияния внешних факторов в состав ВТ ЛС включают компенсационный контур (рис. 5.21) на который действуют те же факторы, что и на рабочий, кроме непосредственно измеряемого параметра.
Существенной особенностью ВТ ЛС является их многопараметричность, т.к. ЭДС преобразователя зависит от многих характеристик объекта контроля и окружающей среды, неявно влияющих на выходной сигнал. Это обстоятельство определяет как достоинства, так и недостатки ВТ измерений. Для компенсации интегрального влияния внешних факторов в состав ВТ ЛС включают компенсационный контур (рис. 5.21) на который действуют те же факторы, что и на рабочий, кроме непосредственно измеряемого параметра.
В задачах многопараметрического контроля, когда приходится управлять сразу несколькими переменными, удобно использовать многокомпонентные ВТ датчики, получившие название матричных ВТ преобразователей. ЭЛС, построенные на базе матричных преобразователей, широко используются для контроля геометрических параметров движущихся узкопрофильных поверхностей с разрывами и уступами. В частности, в ряде стран (в том числе - России) разработаны ВТ ЛС для технической диагностики рельсового пути и контактного провода на железнодорожном транспорте [ ]. В этом случае, матричные ВТ датчики содержат не одну, а несколько (матрицу) сигнальных катушек. Обычно в задачах диагностики рельсов применяют шесть, а для контроля состояния провода две катушки. На рис. 5.22 показан пример такого шестикомпонентного ВТ датчика и схема его установки. Матричный ВТ датчик накладного типа представляет собой две идентичные катушки «восьмеркообразной» намотки, имеющие общую ось вертикальной симметрии Z. В горизонтальной плоскости XY катушки ортогональны друг другу. Каждая из кату шек, в свою очередь, выполнена в виде двух секций (на рис. 5.22 они обозначены 1-2 и 3-4), так, что, в итоге получается 4 секционные сигнальные катушки. Датчик, работающий в диапазоне частот 0,1 … 1,0 МГц, располагают непосредственно под вагоном на фиксированном расстоянии над контролируемым рельсом. На рис. 5.22 обозначены контролируемые параметры пути: Dx и Dh - смещение оси рельса в боковом и вертикальном направлениях, Dr - боковой износ рельса, Dz и Dy - превышение рельсов и зазор в стыке, DН - рельсовая база. (Катушки 1 и 2 наиболее чувствительны к изменению параметров Dx и Dh, а также Dr, 3-4 - к параметрам Dz и Dy и Dr).
шек, в свою очередь, выполнена в виде двух секций (на рис. 5.22 они обозначены 1-2 и 3-4), так, что, в итоге получается 4 секционные сигнальные катушки. Датчик, работающий в диапазоне частот 0,1 … 1,0 МГц, располагают непосредственно под вагоном на фиксированном расстоянии над контролируемым рельсом. На рис. 5.22 обозначены контролируемые параметры пути: Dx и Dh - смещение оси рельса в боковом и вертикальном направлениях, Dr - боковой износ рельса, Dz и Dy - превышение рельсов и зазор в стыке, DН - рельсовая база. (Катушки 1 и 2 наиболее чувствительны к изменению параметров Dx и Dh, а также Dr, 3-4 - к параметрам Dz и Dy и Dr).
Рассмотренная система установлена в передвижной лаборатории комплексной диагностики пути, способной производить контроль со скорость передвижения вагона по железнодорожной магистрали - 80 км/час.
Другим примером использования ВТ ЛС является задача слежения за сварочным швом (рис. 5.23). Четырехкомпонентный матричный ВТ датчик включается в состав системы управления сварочного робота. Каждый из информационных каналов предназначен для измерения своего влияющего фактора - в данном случае, параметров взаимного положения свариваемых деталей и сварочной головки. Например, каналы, связанные с катушками 1 и 4 предназначены для измерения высоты расположения датчика над объектами сварки h1, h2, Dh, а катушки 2 и 3 входят в канал измерения ширины шва x и контроля базы r (расстояния от центра датчика до линии шва). Указанные параметры, в конечном счете, позволяют контролировать поперечное смещение электрода относительно линии шва, длину дуги и управлять скоростью подачи проволоки.
Существенным недостатком всех матричных ВТ датчиков является высокий коэффициент влияния информационных каналов li½j, составляющий ~ 12 … 20%.
 Весьма важной областью применения ВТ ЛС, является область неразрушающего контроля изделий металлургической промышленности. Поскольку структурное состояние металлов влияет на их электрические и магнитные свойства, оказывается возможным контролировать не только сплошность материала, но и его химический состав, а также качество термической обработки и состояние поверхностного слоя после механической обработки. Схема такой системы для автоматизации процесса контроля сплошности отливок, представлена на рис. 5.24. Система включает несколько разнотипных ВТ датчиков, что позволяет детерминировать различные дефекты и их параметры: наружные царапины и их глубину H, длину l и глубину залегания d трещин и раковин. Выходным сигналом ВТ датчика является изменяющаяся частота генерации, которая с помощью частотного дискриминатора преобразуется в аналоговый амплитудный сигнал, пропорциональный измеряемому параметру. Усилитель и нормализатор несколько выравнивают функцию преобразования, хотя она все равно остается нелинейной.
Весьма важной областью применения ВТ ЛС, является область неразрушающего контроля изделий металлургической промышленности. Поскольку структурное состояние металлов влияет на их электрические и магнитные свойства, оказывается возможным контролировать не только сплошность материала, но и его химический состав, а также качество термической обработки и состояние поверхностного слоя после механической обработки. Схема такой системы для автоматизации процесса контроля сплошности отливок, представлена на рис. 5.24. Система включает несколько разнотипных ВТ датчиков, что позволяет детерминировать различные дефекты и их параметры: наружные царапины и их глубину H, длину l и глубину залегания d трещин и раковин. Выходным сигналом ВТ датчика является изменяющаяся частота генерации, которая с помощью частотного дискриминатора преобразуется в аналоговый амплитудный сигнал, пропорциональный измеряемому параметру. Усилитель и нормализатор несколько выравнивают функцию преобразования, хотя она все равно остается нелинейной.
В табл. 5.1 представлены некоторые характеристики ВТ систем.
Таблица 5.1. Примеры промышленных ВТ ЛС
| Модель | Диапазон измерения параметров | e, % | f, МГц | Р, Вт | Размеры, мм | m, кг | |
| ДСМ-0,1/1 | трещины | 2 мм | 5 | 1 | 10 | 150´230´270 | 2,7 |
| ВМ-10Н | шероховатость | 0,3 мм | 3 | 0,1 | 0,1 | 2,2 | |
| вибрации | 0,02 ... 20 Гц | 2 | регулируется | ||||
| ВТ-11НЦ | дальность | 0,001 ... 2мм | 5 | 0,1 | 0,4 | 140´220´340 | 1,9 |
| МТП-01* | толщина покрытия | 0,2 ... 10 | 5 | 220´130´150 | 0,5 |
Примечания.
1. Массо-габаритные показатели включают блок электроники. Масса катушки ДСМ-0,1/1 ~ 50 г, ее размеры ~ Æ 20х28
2. На точность датчика в режиме измерения малых расстояний (зазоров) влияет шероховатость поверхности.
3. Система МТП-01 представляет собой магнитный толщиномер.
ВТ метод в настоящее время является одним из основных методов неразрушающего контроля металлических объектов разных габаритов и формы. Его достоинства: простота конструкций, высокая разрешающая способность, малогабаритность и надежность позволяют производить контроль качества объектов сложной формы, таких, например, как лопатки турбин. В то же время недостатки ВТ ЛС, связанные с малой глубиной зоны контроля, существенной нелинейностью и невысокой точностью (e ~ 3…5 %) требуют применения в диагностических комплексах и других локационных методов.
5.2.3. Электромагнитные локационные системы специального назначения
В последнее время все чаще электромагнитные принципы применяются для решения специальных задач экстремальной робототехники, а также связанных с обеспечением безопасности, контролем доступа и т.п. Первые разработки в этой области датируются 20-ми годами ХХ века, когда в США были созданы устройства, позволяющие обнаруживать выносимые с заводов детали. К середине века в СССР появились приборы, способные различать изделия из черных и цветных металлов, которые были установлены на Монетном дворе. Во время Второй мировой войны активно развивались средства поиска мин, и к концу ХХ века было разработано большое количество различных схем миноискателей, позволяющих обнаруживать мины всех типов, включая пластиковые. В зависимости от области применения ЭЛС специального назначения можно разделить на две группы:
· детекторы металлов;
· электромагнитные антенны.
Иногда, не вдаваясь в детали, их объединяют общим термином - металлоискатели, понимая под этим локационные активные или пассивные ЭЛС для обнаружения металлических предметов из черных и цветных металлов в непроводящих и слабо проводящих средах (дерево, одежда, пластмасса). Дальность обнаружения металлических объектов составляет 20 ... 200 мм.
Рассмотрим некоторые базовые принципы построения металлоискателя. Его основой является специальная катушка - антенна, регистрирующая пассивные металлосодержащие объекты в зоне обнаружения или определяющая наличие электромагнитных полей в этой зоне. Существует несколько базовых схем построения подобных ЭЛС, основанных на использовании методов биений, мостовых схем и «передатчика-приемника» [ ].
 Самым простым является метод биений, заключающийся в сравнении значений частоты колебаний двух генераторов: образцового и перестраиваемого, частота которого изменяется под воздействием на его колебательный контур искомого металлического предмета. По сравнению с ним мостовой метод (схема включает индуктивный мост) более точен и чувствителен, но сложнее и капризнее в эксплуатации. Наиболее распространены схемы «передатчика-приемника» , в которых используются две катушки - излучающая (передающая) и приемная. Также как и в вихретоковых ЭЛС здесь необходимо «развязывать» сигналы катушек, так, чтобы поле излучающей катушки не наводило сигнал в приемной в отсутствии металлических предметов. Простейшие конструкции датчиков основаны на использовании катушек с перпендикулярными (рис. 5.25а) и скрещивающимися осями (рис. 5.25б). Однако, возможны и другие конструктивные схемы. Так, получили распространение более сложные, но и более точные конструкции ЭЛС, антенны которых построены по дифференциальной (рис. 5.25в) и компланарной схемам (рис. 5.25г, д ). Данный подход позволяет максимально приблизить датчик к поверхности земли. В компланарной схеме приемная катушка может быть выполнена в виде «восьмерки» и помещена внутрь излучающей. В этом случае, ЭДС в каждой половинке «восьмерки» при отсутствии объекта компенсируются. Другим решением является такое расположение катушек («обручальное»), при котором суммарный поток вектора магнитной индукции через поверхность приемной катушки равен нулю.
Самым простым является метод биений, заключающийся в сравнении значений частоты колебаний двух генераторов: образцового и перестраиваемого, частота которого изменяется под воздействием на его колебательный контур искомого металлического предмета. По сравнению с ним мостовой метод (схема включает индуктивный мост) более точен и чувствителен, но сложнее и капризнее в эксплуатации. Наиболее распространены схемы «передатчика-приемника» , в которых используются две катушки - излучающая (передающая) и приемная. Также как и в вихретоковых ЭЛС здесь необходимо «развязывать» сигналы катушек, так, чтобы поле излучающей катушки не наводило сигнал в приемной в отсутствии металлических предметов. Простейшие конструкции датчиков основаны на использовании катушек с перпендикулярными (рис. 5.25а) и скрещивающимися осями (рис. 5.25б). Однако, возможны и другие конструктивные схемы. Так, получили распространение более сложные, но и более точные конструкции ЭЛС, антенны которых построены по дифференциальной (рис. 5.25в) и компланарной схемам (рис. 5.25г, д ). Данный подход позволяет максимально приблизить датчик к поверхности земли. В компланарной схеме приемная катушка может быть выполнена в виде «восьмерки» и помещена внутрь излучающей. В этом случае, ЭДС в каждой половинке «восьмерки» при отсутствии объекта компенсируются. Другим решением является такое расположение катушек («обручальное»), при котором суммарный поток вектора магнитной индукции через поверхность приемной катушки равен нулю.
 Рассмотрим вкратце один из методов расчета металлоискателей. Для простоты ограничимся схемой антенны, состоящей из двух катушек с перпендикулярными осями. Примем, что, каждая катушка представляет собой круглую бесконечно тонкую рамку [ ]. В этом случае, вектор магнитного момента Pm при протекании тока I равен: Pm = I ns, где $ - площадь рамки, ns - вектор нормали. Если эта катушка используется в качестве излучающей, то ток через нее на некотором большом, по сравнению с собственными размерами расстоянии r создаст вектор магнитной индукции B, с компонентами Bn и Bt:
Рассмотрим вкратце один из методов расчета металлоискателей. Для простоты ограничимся схемой антенны, состоящей из двух катушек с перпендикулярными осями. Примем, что, каждая катушка представляет собой круглую бесконечно тонкую рамку [ ]. В этом случае, вектор магнитного момента Pm при протекании тока I равен: Pm = I ns, где $ - площадь рамки, ns - вектор нормали. Если эта катушка используется в качестве излучающей, то ток через нее на некотором большом, по сравнению с собственными размерами расстоянии r создаст вектор магнитной индукции B, с компонентами Bn и Bt:
B = (m0/2p) (Pm/r3),
Bn = (m0/2p) (Pm/r3) cosb
Bt = (m0/2p) (Pm/r3) sinb
где индексы n и t обозначают соответственно нормальную и тангенциальную составляющие вектора магнитной индукции и r >> Ö$. Взаимодействие излучающей, приемной катушек антенны и объекта можно представить следующим образом. Магнитный поток излучающей катушки попадает на объект и переизлучается от него на приемную катушку. Следовательно, объект апроксимируется эквивалентной рамкой, магнитный момент которой Pm* зависит от тока, т.е. проводимости объекта, его размеров и т.д. Таким образом, модель взаимодействия антенны металлоискателя с объектом представляется взаимодействием трех рамок с током (рис. 5.26). Расчет этой модели, приведенный в [ ] для r и L >> Ö$, где L - база датчика, показывает, что величину отраженного от объекта сигнала можно оценить значением наведенной в приемной катушке индукции B’. Составляющая B’ в направлении нормали ns’ B0 вызывает в приемной катушке ЭДС индукции U0 = B0$0N0 p. Здесь $0 и N0 - площадь сечения приемной катушки и ее число витков, p - оператор Лапласа.
Для индукции B0 справедливо выражение:
B0 = (m0/2p) (Pm*/r’3) sin 2(g+b).
Магнитный момент эквивалентной рамки в значительной степени определяется формой объекта. Для случая шарового однородного объекта имеем  , где B - индукция магнитного поля излучающей катушки, m - магнитная проницаемость материала, R - радиус объекта-шара.
, где B - индукция магнитного поля излучающей катушки, m - магнитная проницаемость материала, R - радиус объекта-шара.
Существенно, что функция преобразования металлоискателя, использующего метод «передатчика-приемника» зависит от ориентации на объект (параметры g и b). Этот недостаток отсутствует у индукционных металлоискателей, в антеннах которых излучающая и приемная катушки совпадают. Наведенное в объекте магнитное поле воспринимается той же катушкой, при этом к индукции возбуждения добавляется составляющая пропорциональная величине магнитного момента Pm*.
Характеристиками металлоискателей являются чувствительность и селективность. Под селективностью понимается способность металлоискателя детектировать объекты из разных металлов и сплавов. Значения этих параметров в значительной степени определяются рабочей частотой прибора. Для определения рабочей частотой применяется универсальную зависимость, где в качестве константы используется размер монеты R. Оптимальная частота сигнала излучателя f приблизительно равна:  , где r - удельное сопротивление материала. Например, для медной монеты диаметром 25 мм - оптимальная частота составит около 1 кГц, хотя в промышленных металлоискателях самым распространенным диапазоном является 5 … 15 кГц. (Вообще говоря, работа на высоких частотах ~ 90 кГц ... 1 МГц обеспечивает более высокую чувствительность, в том числе при детектировании металлов со слабыми ферромагнитными свойствами - медь, серебро). Использование же в схемах низких частот обеспечивает, с одной стороны, слабую реакцию на нежелательные сигналы (мокрый песок, мелкие объекты, типа стружки), а с другой - хорошую чувствительность при поиске скрытых предметов малого и среднего размера (металлических коробок, труб, монет и пр.).
, где r - удельное сопротивление материала. Например, для медной монеты диаметром 25 мм - оптимальная частота составит около 1 кГц, хотя в промышленных металлоискателях самым распространенным диапазоном является 5 … 15 кГц. (Вообще говоря, работа на высоких частотах ~ 90 кГц ... 1 МГц обеспечивает более высокую чувствительность, в том числе при детектировании металлов со слабыми ферромагнитными свойствами - медь, серебро). Использование же в схемах низких частот обеспечивает, с одной стороны, слабую реакцию на нежелательные сигналы (мокрый песок, мелкие объекты, типа стружки), а с другой - хорошую чувствительность при поиске скрытых предметов малого и среднего размера (металлических коробок, труб, монет и пр.).
Одним из наиболее известных решений является схема низкочастотного металлоискателя [ ], построенного в рамках метода «передатчика-приемника» (рис. 5.27).
 Генератор металлоискателя возбуждает колебания в передающей катушке, создавая в ней переменное магнитное поле, частотой 8кГц. Приемная катушка выполнена в виде «восьмерки» (или расположена перпендикулярно передающей). Благодаря такому расположению ЭДС в отсутствии объекта мала. Число витков катушки nк приближенно определяют по формуле:
Генератор металлоискателя возбуждает колебания в передающей катушке, создавая в ней переменное магнитное поле, частотой 8кГц. Приемная катушка выполнена в виде «восьмерки» (или расположена перпендикулярно передающей). Благодаря такому расположению ЭДС в отсутствии объекта мала. Число витков катушки nк приближенно определяют по формуле:  , где L и D - индуктивность (мкГн) и диаметр (см) катушки соответственно.
, где L и D - индуктивность (мкГн) и диаметр (см) катушки соответственно.
Металлический предмет, попадая в поле катушки, изменяет ее индуктивность, и на выходе катушки появляется значительный сигнал, который усиливается, выпрямляется синхронным детектором и фильтруется. Дискриминатор служит для компенсации нулевого сигнала, для чего в УВЧ подмешивается часть сигнала генератора. Амплитуда постоянного по величине выходного сигнала возрастает, по мере приближения к металлическому объекту. На схеме сравнения этот сигнал сравнивается с опорным, величина которого соответствует порогу чувствительности. При превышении этого значения электронный ключ подключает к выходному усилителю звуковой генератор, формирующий пачки прямоугольных импульсов частотой 2 кГц с частотой повторения 8 Гц.
Излучающая катушка имеет диаметр 190 мм и состоит из 200 витков, приемная - 125 мм, 100 витков.
Головка металлоискателя представляет из себя пластмассовую тарелку диаметром 25 см, на которой размещены две экранированные катушки (рис. 5.28). В рассматриваемой схеме они имеют одинаковую форму и размеры и наматываются на D-образный контур проводом диаметром 0,27 мм. Затем катушки экранируются алюминиевой фольгой, причем фольга на приемной должна содержать разрыв экрана, препятствующий образованию замкнутого витка по окружности катушки.
В настоящее время промышленно выпускается много моделей металлоискателей. Однако, большинство из них используют один из рассмотренных выше методов. Сравнительная характеристика этих методов приведена в табл. 5.2.
Таблица 5.2. Сравнительная характеристика методов обнаружения металлов
| Метод | Глубина обнаружения, см | ||
| Монета | Пистолет | Каска | |
| Биения | 5 | 10 | 20 |
| Индукционный | 15 | 40 | 60 |
| «Передача-прием» | 25 | 50 | 1,1 |
Как следует из табл. 5.2 лучшей чувствительностью и селективностью обладают металлоискатели, построенные по методу «передача-прием», однако они существенно дороже.
 Еще одним типом ЭЛС специального назначения являются устройства, работающие в радиоволновом СВЧ диапазоне и получившие название георадаров. Как следует из названия, системы этого типа используют принцип активной локации и предназначены для обнаружения различных объектов, расположенных в грунте. В отличие от рассмотренных выше ЭЛС георадар способен обнаружить не только металлические объекты. Георадары применяются при решении задач измерения толщины и определения местоположения подповерхностных слоев грунта, локализации труб и подземных коммуникаций, контроля состояния полотна дорог в строительстве, обнаружения пластмассовых мин, нахождения и определения размеров залежей полезных ископаемых, исследования толщины и состояния ледяных покровов, поиска грунтовых вод и т. п. Глубина локации современных систем достигает ~7 … 10 м.
Еще одним типом ЭЛС специального назначения являются устройства, работающие в радиоволновом СВЧ диапазоне и получившие название георадаров. Как следует из названия, системы этого типа используют принцип активной локации и предназначены для обнаружения различных объектов, расположенных в грунте. В отличие от рассмотренных выше ЭЛС георадар способен обнаружить не только металлические объекты. Георадары применяются при решении задач измерения толщины и определения местоположения подповерхностных слоев грунта, локализации труб и подземных коммуникаций, контроля состояния полотна дорог в строительстве, обнаружения пластмассовых мин, нахождения и определения размеров залежей полезных ископаемых, исследования толщины и состояния ледяных покровов, поиска грунтовых вод и т. п. Глубина локации современных систем достигает ~7 … 10 м.
В основу работы ЭЛС положен принцип классической локации - обнаружение и регистрация вторичных радиоволн, отраженных или рассеянных подповерхностными объектами. Система, как правило, содержит две антенны - излучающую и приемную (рис. 5.29). Как известно, плотность потока мощности p излучаемой антенной мощностью P0 на расстоянии R для изотропной среды определяется зависимостью: p = (P0 /4pR2) К(j, q), где К(j, q) - коэффициент направленного действия антенны. В случае рассеянного излучения плотность потока мощности p’ в точке приема равна
p’ = p$ /4pR2) = P0$ К(j, q)/16p2R4.
Здесь $ - эффективная отражающая поверхность, характеризующая эффективность излучения в данном направлении. Параметр $ определяется свойствами обнаруженного объекта (его формой, размером и ракурсом), удельным сопротивлением r и диэлектрической проницаемостью e среды. Однако в отличии от традиционного радара георадар работает в существенно анизотропной среде (грунте), что значительно затрудняет расчет его конструкции. Поэтому, вычисление размеров объекта на основе указанного выражения приводит к существенной ошибке.
 Импульсный портативный георадар, схема которого представлена на рис. 5.29 предназначен для обнаружения объектов на глубине до 5 м и обладает разрешающей способностью ~ 0,15 м. В системе используются согласованные по характеристикам приемные и передающие антенны, причем их параметры подобраны в зависимости от диапазона исследуемых глубин. Так, несущая частота излучений для ближнего и среднего диапазонов глубин 0 ... 1,5 м составляет 400 МГц и 1ГГц, а для диапазона глубин 0 ... 5 м - 150 МГц. Амплитуда импульсов достигает 50 В, что позволяет улучшить энергетические характеристики и повысить разрешающую способность. Передающая антенна, возбуждаемая генератором импульсов, излучает электромагнитный импульс, длительность которого определяется полосой пропускания антенны. Для антенн диапазона глубин 0 ... 1,5 м длительность равна 2,5 нс (центральная частота 400 МГц) и 1 нс (центральная частота 1 ГГц), а для антенн диапазона глубин ~ 0 ... 5 м длительность равна б нс. Отраженные от подповерхностных структур сигналы регистрируются затем приемной антенной. Малошумящий стробоскопический преобразователь с высокой частотой стробирования (100 кГц), служит для накопления вводимых сигналов в сигнальный процессор фирмы Octagon с целью их последующей обработки и выделения сигнал от отражающего объекта на фоне шума. Электролюминесцентный индикатор фирмы Planar, управляемый видеоконтроллером фирмы Octagon, позволяет осуществить выбор режимов функционирования и подготовку прибора к работе. Работа ЭЛС сводится к определению распределения диэлектрической проницаемости по глубине. С этой целью передающая и приемная антенны перемещаются вдоль обозначаемых на поверхности профилей. На основе собранных сигналов формируется временной профиль, на котором ось глубин калибрована в единицах времени. Различные значения коэффициента отражения соответствуют различным значениям градаций яркости на индикаторе. С учетом диэлектрической проницаемости e рассчитывается шкала глубин, с помощью которой можно определить глубину каждой отражающей границы.
Импульсный портативный георадар, схема которого представлена на рис. 5.29 предназначен для обнаружения объектов на глубине до 5 м и обладает разрешающей способностью ~ 0,15 м. В системе используются согласованные по характеристикам приемные и передающие антенны, причем их параметры подобраны в зависимости от диапазона исследуемых глубин. Так, несущая частота излучений для ближнего и среднего диапазонов глубин 0 ... 1,5 м составляет 400 МГц и 1ГГц, а для диапазона глубин 0 ... 5 м - 150 МГц. Амплитуда импульсов достигает 50 В, что позволяет улучшить энергетические характеристики и повысить разрешающую способность. Передающая антенна, возбуждаемая генератором импульсов, излучает электромагнитный импульс, длительность которого определяется полосой пропускания антенны. Для антенн диапазона глубин 0 ... 1,5 м длительность равна 2,5 нс (центральная частота 400 МГц) и 1 нс (центральная частота 1 ГГц), а для антенн диапазона глубин ~ 0 ... 5 м длительность равна б нс. Отраженные от подповерхностных структур сигналы регистрируются затем приемной антенной. Малошумящий стробоскопический преобразователь с высокой частотой стробирования (100 кГц), служит для накопления вводимых сигналов в сигнальный процессор фирмы Octagon с целью их последующей обработки и выделения сигнал от отражающего объекта на фоне шума. Электролюминесцентный индикатор фирмы Planar, управляемый видеоконтроллером фирмы Octagon, позволяет осуществить выбор режимов функционирования и подготовку прибора к работе. Работа ЭЛС сводится к определению распределения диэлектрической проницаемости по глубине. С этой целью передающая и приемная антенны перемещаются вдоль обозначаемых на поверхности профилей. На основе собранных сигналов формируется временной профиль, на котором ось глубин калибрована в единицах времени. Различные значения коэффициента отражения соответствуют различным значениям градаций яркости на индикаторе. С учетом диэлектрической проницаемости e рассчитывается шкала глубин, с помощью которой можно определить глубину каждой отражающей границы.
На рис. 5.30 показано изображение профиля, полученного с использованием обычной обработки и с использованием дополнительных корреляционных обработок (методом вычитания среднего по участку значения). На профиле, представленном на втором рисунке, значительно легче идентифицировать две трубы.
5.3. Акустические локационные системы
Акустические системы имеют чрезвычайно широкую область практического применения. Условно выделяют три основных направления: получение информации об объекте, прием и передача сигналов и активное воздействие на вещество. При каждом конкретном применении используются акустические волны определенного частотного диапазона и интенсивности. Так, в рамках первого направления разрабатываются различные дефектоскопы, уровне- и толщиномеры, системы медицинской диагностики и звуковидения, гидролокационные приборы (эхолоты и гидролокаторы), работающие в диапазоне 103 … 1011 Гц. Второе направление, в основном связано с созданием средств связи, а также ультразвуковыми процессорами. Устройства этой группы функционируют на частотах 105 … 1010 Гц. Наконец, в акустических системах, активно воздействующих на вещество (к ним относятся хирургические инструменты, устройства механической обработки материалов и сварки) применяются колебания высокой интенсивности 1 … 50 Вт/см2 с частотами 104 … 107 Гц.
Ультразвуком называются упругие колебания и волны, частота которых превышает 15 ... 20 кГц.
До недавнего времени считалось, что ультразвук редко встречается в природе, однако исследования последних лет показали, что наш мир - это мир звуков высокой частоты. Его источниками являются как живые существа, так и природные источники: леса, горы, молнии, ветер и др. Интенсивность излучателей ультразвука варьируется в широких пределах. Так, например, сверчки на расстоянии 30 см создают излучения интенсивностью 90 дБ. Мощными генераторами ультразвука являются джунгли и моря; интенсивность фона на частоте 20 кГц достигает 55 дБ.
История исследований в области ультразвука локации ведет свое начало с 70-х годов XVIII века и связана с именем итальянца Лазаро Спалланцани, изучавшего ночное зрение сов и летучих мышей. Его подход является примером грамотно организованной методики эксперимента. Сначала ученый, надев на голову летучей мыши светонепроницаемый колпачок, убедился, что ориентация животного намного ухудшилась. Затем, уточняя результат, он заменил колпачок на прозрачный и с удивлением получил тот же результат. Со временем Спалланцани понял, что зрение и вовсе не влияет на способность летучих мышей перемещаться в пространстве. Его швейцарский коллега Шарль Жюрин, также исследуя летучих мышей, закупоривал их уши воском и в результате, пришел к выводу, что именно уши принимают на себя функцию зрения. Спалланцани сначала скептически отнесся к этому результату, полагая, что опыты Жюрина травмируют мышей, но собственными точными экспериментами с использованием тонких пробок убедился в правоте швейцарца. Тем не менее, только спустя 120 лет изобретатель станкового пулемета Х. Максим выдвинул предположение о наличии у мышей звуковой локации. Он же первым сделал попытку рассчитать и диапазон частот эхолокации; по его мнению, она осуществлялась в инфразвуковой области, с частотами не превышающими 15 Гц.
Толчком к активному изучению ультразвука послужили два фактора. Первым была гибель «Титаника» в 1912 году. Вторым, явилась проблема обнаружения немецких подводных лодок во время первой мировой войны. Для этой цели Поль Ланжевен и предложил использовать ультразвука локацию, дав, тем самым, рождение гидроакустики. 1928 год можно считать годом рождения дефектоскопии, тогда советский инженер С. Соколов выдвинул идею использовать отражение ультразвуковых волн для обнаружения дефектов в твердых телах. Что же касается механизма эхолокации летучих мышей, то он окончательно был понят лишь в 40-х годах XX века, благодаря исследованиям сотрудников Гарвардского университета США Г. Пирса, сконструировавшего ультразвуковой детектор и Д. Гриффина. Они обнаружили, что частотный диапазон излучения мышей составляет 30 ... 70 кГц, при максимальной интенсивности в области 45 .. 50 кГц, причем само излучение не непрерывно, а дискретно - оно осуществляется импульсами длительностью 1 ... 2 мс.
 В робототехнике и мехатронике устройства акустической локации используются чрезвычайно широко. Акустической локационной системой (АЛС) называется совокупность акустических датчиков и средств первичной обработки информации, предназначенных для определения геометрических и физических характеристик объектов в зоне контроля, а также их ориентации относительно выбранной системы координат. Локационные системы очувствления роботов обычно реализуются в соответствии с концепцией «очувствленная рука» (рис. 5.31), при этом АЛС включаются в контур управления, а акустические датчики монтируются на исполнительном механизме.
В робототехнике и мехатронике устройства акустической локации используются чрезвычайно широко. Акустической локационной системой (АЛС) называется совокупность акустических датчиков и средств первичной обработки информации, предназначенных для определения геометрических и физических характеристик объектов в зоне контроля, а также их ориентации относительно выбранной системы координат. Локационные системы очувствления роботов обычно реализуются в соответствии с концепцией «очувствленная рука» (рис. 5.31), при этом АЛС включаются в контур управления, а акустические датчики монтируются на исполнительном механизме.
АЛС классифицируются по пяти основным признакам.
1. По назначению: дальномеры, охранные устройства и системы безопасности, дефектоскопы и томографы.
2. По типу первичного преобразователя: пьезоэлектрические, магнитострикционные и электростатические.
3. По характеру частотного спектра сигнала: широкополосные, и резонансные.
4. По типу модулирующего воздействия: непрерывные и импульсные.
5. По избирательности: интерференционные и с широкой диаграммой направленности.
5.3.1. Звук и его основные характеристики
 Распространение звука (в том числе и УЗ) описывается волновым уравнением, единым для всех частот:
Распространение звука (в том числе и УЗ) описывается волновым уравнением, единым для всех частот:

где u, r и p - смещение частиц среды (амплитуда волны), ее плотность и давление, r и c - соответственно дальность распространения и скорость волн.
Частотное уравнение для звука имеет тот же вид, что и для других волн. Оно определяет длину волны гармонического колебания (тона) l, распространяющегося со скоростью c:
l = c/f = cT.
Чистые звуки - тона встречаются крайне редко. Обычно звук представляет собой сложное колебание, которое представляют в виде спектра (суммы гармоник) с кратными частотами (обертонами) 2f, 3f, и т.д. ... У гармонического колебания спектр состоит из одной частоты. Периодические колебания, состоящие из набора основной частоты и кратных ей, имеют линейчатый спектр (рис. 5.32). Для непериодических колебаний (шумов) характерны сплошные спектры.
Применительно к звукам речи, различают слово - наименьшую смысловую единицу и фонему - наименьшую звуковую единицу данного языка. Например, в русском языке имеется 41 фонема, образующая 6 гласных звуков (а, о, у, э, и, ы) и 35 согласных. Количество фонем превосходит количество букв, т.к. большинству согласных звуков соответствуют две фонемы - мягкая и твердая. Произносимые звуки могут значительно отличаться от фонем (также как рукописная буква отличается от типографического курсива: к примеру, в тексте «лоб второго», в речи «лоп фтарова»). Области максимальных уровней спектра называются формантами. Именно представление звуков в виде фонем и формант (т.е. использование лингвистических принципов) позволяет строить системы распознавания речи.
Нижняя граница области УЗ частот, отделяющая ее от области слышимого звука, определяется субъективными свойствами человеческого слуха и является условной.
Верхняя граница УЗ обусловлена физической природой упругих волн, которые могут распространяться лишь при условии, что l >> Dэкв, где Dэкв - длина свободного пробега молекул в газах или межатомные расстояния в жидкостях и твердых телах. Следовательно, верхняя граничная частота УЗ fв определяется из условия:
fв = 1/Dэкв
Для газов при нормальном давлении fв ~ 109 Гц, а для жидкостей и твердых тел достигает 1012 ... 1013 Гц.
В зависимости от длины волны УЗ обладает специфическими особенностями передачи и распространения, поэтому область УЗ частот удобно разделить на три диапазона:
· низкие частоты (1,5 104 ... 105 Гц);
· средние (105 ... 107 Гц);
· высокие (107 ... 109 Гц).
· гиперзвук (109 ... 1013 Гц).
Для АЛС по сравнению с ЭЛС характерна значительно меньшая (на несколько порядков) скорость распространения сигналов. Она лежит в пределах 2 102 … 1,5 103 м/c - для газов, 5 102 … 2 103 м/c - для жидкостей и 2 103 … 8 103 м/c - для твердых сред. Такие малые скорости, и, следовательно, малые длины волн намного повышают разрешающую способность УЗ методов по отношению к электромагнитными при равных частотах.
Длина волны УЗ зависит от частоты и среды распространения. Так, для воздуха в самой низкочастотной области l не превышает нескольких сантиметров. В случае высоких УЗ частот значения l составляют 3,4 10-5 ... 3,4 10-7 м в воздухе, 1,5 10-4 ... 1,5 10-6 м - в воде, 5 10-4 ... 5 10-6 м - в стали.
Особенностью УЗ высокочастотного и гиперзвукового диапазонов является возможность применения к нему методов квантовой механики, поскольку длины волн и частоты в этих диапазонах становятся одного порядка с параметрами, характеризующими структуру вещества. Упругой волне данной частоты сопоставляется квазичастица - фонон или квант звуковой энергии. Квантово-механические представления применяют при рассмотрении взаимодействий в твердых телах.
Для оценки амплитуды звуковой волны используются косвенные величины: акустическое давление p = cv, упругое смещение частиц среды u и их колебательная скорость v = du/dt. В свою очередь, характеристикой акустического давления в среде является интенсивность или сила звука, определяемая через энергию звуковой волны.
Интенсивностью звука J называется величина, равная средней по времени энергии, переносимой волной через единичную площадку, перпендикулярную направлению распространения в единицу времени (т.е. удельной мощности Wуд). Для плоской синусоидальной бегущей волны:
 или J = p v/2
или J = p v/2
Параметр Z = r c получил название характеристического импеданса среды. (Наряду с Z также используется акустический импеданс Zа = p/v, зависящий не только от свойств среды, но и от условий отражения, углов падения и других факторов).
В стоячей волне J = 0, т.к. она не переносит энергию. Интенсивность звука измеряется в Вт/м2 и лежит в пределах 10-12 (нижнее пороговое значение) … 106 (значение в фокусе УЗ концентратора). В частности, в задачах акустического контроля применяют АЛС звукового и УЗ диапазонов с частотами 50 Гц ... 50 МГц и интенсивностью ~ 103 Вт/м2.
Интенсивность звука обратно пропорциональна квадрату расстояния r от источника, зависит от Z и возрастает пропорционально квадрату амплитуды p и частоты f сигнала: J ~ (1/r2, Z, р2, f2). Следовательно, на высоких УЗ частотах могут быть получены сигналы огромной силы. Так, в мегагерцовом диапазоне в излучателях АЛС легко достигается J ~ 10-3  Вт/м2, что в 1000 раз сильнее звука пушечного выстрела. Зависимость силы звука от Z приводит к тому, что в более плотных средах меньшие звуковые давления вызывают большую интенсивность звука. В частности, для получения больших интенсивностей используется принцип «излучения в воду». В этом случае, та же сила звука будет достигнута при 60-ти кратном запасе по амплитуде звукового давления, величина которой лимитируется прочностью излучателя.
Вт/м2, что в 1000 раз сильнее звука пушечного выстрела. Зависимость силы звука от Z приводит к тому, что в более плотных средах меньшие звуковые давления вызывают большую интенсивность звука. В частности, для получения больших интенсивностей используется принцип «излучения в воду». В этом случае, та же сила звука будет достигнута при 60-ти кратном запасе по амплитуде звукового давления, величина которой лимитируется прочностью излучателя.
Громкость £слышимых звуков при одинаковой интенсивности зависит от его частоты. За единицу громкости принят сон - громкость тона (чистого звука) частотой 1 кГц при интенсивности 40 дБ. (Для примера, шепот человека оценивается в 20 дБ, крик - в 40, болевой порог - в 130 дБ). Часто для определения громкости применяют относительные логарифмические единицы - децибелы, показывающие, насколько звуковое давление p сигнала превосходит порог чувствительности уха. Установлено, что минимальное давление p0, которое способно воспринять человеческое ухо, составляет ~ 2 10-5 Н/м2. Для сравнения: величина давления, при котором разрушается барабанная перепонка равна 2 103 Н/м2. Следовательно, £ = 20lg (p/p0). Вообще говоря, логарифмическая единица измерения отношений мощностей W или энергий называется бел. £* = lg W1/W2. (Обычно употребляется 1/10 доля бела, или децибел).
Громкости некоторых источников звука приведены в табл. 5.3.
Таблица 5.3. Громкости различных источников звука
| Источник звука | Громкость £, дБ |
| Тихая комната | 30 |
| Шум оживленной улицы | 60 |
| Шум самолета на расстоянии 1 м | 115 |
| Болевой порог | 130 |
К основным законам распространения звука относятся:
· законы отражения и преломления звука на границах сред (рис. 5.33);
· законы дифракции и рассеяния звука при наличии препятствий и неоднородностей на границах;
· законы волноводного распространения в ограниченных участках среды.
В большинстве случаев построения АЛС для задач локации и связи ограничиваются моделью геометрической или линейной акустики, в которой рассматриваются только первый и третий законы распространения. Эта модель соответствует зоне упругих деформации среды распространения УЗ. Характер распространения УЗ волн зависит от соотношения между l звука и характерным (для условий его распространения) геометрическим параметром dхар (размером источника звука или препятствия на пути волны, размером неоднородностей среды, поперечного сечения волновода и т. п.). В рамках линейной модели принимается dхар >> l.
Второй закон учитывается в задачах акустической диагностики и звуковидения. Степень отклонения от геометрической картины распространения и необходимость учета дифракционных явлений определяется параметром  где r - расстояние от точки наблюдения до объекта, вызывающего дифракцию.
где r - расстояние от точки наблюдения до объекта, вызывающего дифракцию.
Третий закон распространения имеет очень большую роль в задачах гидроакустической связи, описывая явление «подводного звукового канала». Этот канал, образуется на некоторых глубинах моря вследствие стратификации - неравномерного распределения температуры и плотности воды с глубиной. Указанная неравномерность приводит к тому, что характеристический импеданс среды на некоторой глубине локально уменьшается. Образующийся волновод достигает сотен километров длины и может использоваться для передачи сигналов с малым затуханием.
Отражение звука от объектов приводит к появлению эха и реверберации.
Область применения линейной акустической модели УЗ определяется двумя основными факторами - интенсивностью звуковых волн и их частотой. Так, при увеличении интенсивности J волн в их поле проявляются многочисленные нелинейные эффекты (нарушается принцип суперпозиции, изменяется форма волны, а ее спектр обогащается высшими гармониками и т.д.). Критерием применимости аппарата линейной акустики служит выражение вида:
М = v/c << 1,
где М - число Маха. Данное неравенство означает, что колебательная скорость частиц среды v должна быть много меньше скорости распространения звука в этой среде. Это выражение выполняется довольно часто. Так, для звука в воздухе, интенсивность которого соответствует громкому разговору М » 10-6. Даже вблизи мотора реактивного самолета v » 250 см/с, и, следовательно, при скорости звука в воздухе с = 342 м/с, М < 0,01.
Роль нелинейных эффектов в звуковом поле возрастает и с частотой. Действительно, для гармонической волны частотой f колебательная скорость определяется формулой: v = 2p f u и тогда M = 2p f u/c.
5.3.2. Акустические свойства среды
Особенности распространения УЗ волн (их тип, скорость c, дальность L и пр.) определяются, главным образом, акустическими свойствами среды, к которым относятся:
· упругость (характеризуемая модулями объемной упругости K, Юнга E и сдвига G) и плотность r;
· характеристический импеданс Z;
· затухание c.
Например, при распространении УЗ в неограниченной газовой или жидкой среде в последней возникает изменение объема, вызывающее продольные волны. Их скорость c равна:

 В твердом теле, кроме того, существует упругость формы, и, поэтому, здесь образуются волны двух типов: продольные и поперечные. Следовательно, скорость распространения c зависит от типа деформации. В частности, для безграничного твердого тела продольные волны спр (вызывающие деформацию растяжения-сжатия) и поперечные споп (вызывающие деформацию сдвига) распространяются со скоростью:
В твердом теле, кроме того, существует упругость формы, и, поэтому, здесь образуются волны двух типов: продольные и поперечные. Следовательно, скорость распространения c зависит от типа деформации. В частности, для безграничного твердого тела продольные волны спр (вызывающие деформацию растяжения-сжатия) и поперечные споп (вызывающие деформацию сдвига) распространяются со скоростью:

Здесь n - коэффициент Пуассона.
В ограниченных средах на скорость распространения влияет наличие и характер границ, что приводит к зависимости скорости звука от частоты: c = F(f), т.е. к дисперсии скорости звука.
В табл. 5.4 представлены некоторые акустические характеристики различных сред.
Таблица 5.4. Сравнительные акустические характеристики некоторых сред
| Материал | r, 103 кг/м3 | Скорость распространения волн, 103 м/с спр споп сповер | Z (для продольных волн), МПа с/м | ||
| Al | 2,7 | 6,4 | 3,1 | 2,9 | 17,2 |
| Fe | 7,8 | 5,9 | 3,2 | 3,0 | 46,3 |
| Pt | 21,4 | 3,9 | 1,6 | 1,5 | 84,6 |
| Бетон | 1,8 ... 2,8 | 2,1 ... 5,2 | - | - | 6,9 |
| Стекло | 2,6 | 5,7 | 3,4 | 3,1 | 14,5 |
| Вода | 0,98 | 1,5 | - | - | 1,5 |
| Резина | 1,3 ... 2,1 | 1,5 | - | - | 1,9 ... 3,1 |
| Костная ткань | 1.2 …1,8 | 2500 …4300 | - | - | 3,3 … 7,5 |
| Камни печени | 1400 …2200 | - | - | 1,2 … 2,4 | |
| Кровь | 1,06 | 1540 … 1600 | - | - | 1,5 … 1,7 |
| Воздух | 1,3 10-3 | 0,33 | - | - | 4,3 10-4 |
Затухание УЗ сигнала представляет собой уменьшение амплитуды u и, следовательно, интенсивности J звуковой волны по мере ее распространения (рис. 5.34):
u = u0 e-2cx и J = J0 e-4cx
где c - коэффициент затухания, x - направление распространения волны. (В формулах учтено, что интенсивность звука J пропорциональна квадрату амплитуды волны u (или давления p), и волна при локации проходит двойной путь 2х). Коэффициент затухания c измеряется в Нп/м или дБ/м, причем 1 дБ/м = 0,115 Нп/м.
Затухание вызывается следующими основными факторами: расхождением фронта волны с удалением от источника, а также рассеянием и поглощением звука.
 Первый из этих факторов связан с тем, что по мере удаления волны от источника его энергия распределяется во все большую границу волнового фронта, уменьшая, тем самым, интенсивность волны J. Амплитуда сферической волны убывает ~ r--1, цилиндрической ~ r--1/2. В УЗ локации также используют представление о коэффициенте ослабления Kосл = Wпр/Wизл (здесь Wпр и Wизл - величина мощности сигнала на входе приемника и выходе передатчика). Kосл уменьшается с расстоянием между объектами связи и зависит от размеров излучателя и частоты сигнала (рис. 5.35). В УЗ локации значение Kосл превышают 100 дб.
Первый из этих факторов связан с тем, что по мере удаления волны от источника его энергия распределяется во все большую границу волнового фронта, уменьшая, тем самым, интенсивность волны J. Амплитуда сферической волны убывает ~ r--1, цилиндрической ~ r--1/2. В УЗ локации также используют представление о коэффициенте ослабления Kосл = Wпр/Wизл (здесь Wпр и Wизл - величина мощности сигнала на входе приемника и выходе передатчика). Kосл уменьшается с расстоянием между объектами связи и зависит от размеров излучателя и частоты сигнала (рис. 5.35). В УЗ локации значение Kосл превышают 100 дб.
При анализе затухания УЗ волн их волновое поле, расходящееся от излучателя, рассматривают в двух зонах: ближней Lб (зоне Френеля) и в дальней Lд (зоне Фраунгофера). В ближней зоне поле имеет неопределенную форму и сложно для расчета (его сечение иногда аппроксимируется цилиндром). В дальней - фронт волны имеет сферическую форму, а само поле подобно усеченному конусу, с углом расхождения a:
Здесь dхар - характерный размер (обычно, диаметр излучателя dизл). Для определения ближней Lб и дальней Lд зон используется неравенство: Lб £ Lкр и Lд >> Lкр, причем


Приведенные выражения свидетельствуют, что расхождение фронта зависит от диаграммы направленности излучателя. На практике для оценки затухания чаще всего используют графики (рис. 5.36).
 Рассеяние и поглощение звука определяют потери энергии в среде. При поглощении звуковая энергия переходит в другие формы, в первую очередь - тепловую, а при рассеянии остается звуковой, но теряет направленность в результате отражений от неоднородностей среды. Относительная роль того или иного фактора при затухании звука зависит от свойств среды распространения и от характеристик самой волны. Так, для жидких и газовых сред (без взвесей) рассеяние практически отсутствует, и затухание определяется в основном поглощением. В твердых телах коэффициенты поглощения cп для продольных и поперечных волн различны, правда, их значения сравнительно невелики, и, поэтому, затухание зависит, главным образом, от рассеяния cр на границах зерен. В задачах дефектоскопии, когда дальность распространения УЗ невелика затухание оценивается одним коэффициентом c равным: c = cп + cр.
Рассеяние и поглощение звука определяют потери энергии в среде. При поглощении звуковая энергия переходит в другие формы, в первую очередь - тепловую, а при рассеянии остается звуковой, но теряет направленность в результате отражений от неоднородностей среды. Относительная роль того или иного фактора при затухании звука зависит от свойств среды распространения и от характеристик самой волны. Так, для жидких и газовых сред (без взвесей) рассеяние практически отсутствует, и затухание определяется в основном поглощением. В твердых телах коэффициенты поглощения cп для продольных и поперечных волн различны, правда, их значения сравнительно невелики, и, поэтому, затухание зависит, главным образом, от рассеяния cр на границах зерен. В задачах дефектоскопии, когда дальность распространения УЗ невелика затухание оценивается одним коэффициентом c равным: c = cп + cр.
Коэффициент поглощения cп пропорционален квадрату частоты: cп ~ f2, следовательно, затухание УЗ волн существенно выше, чем звуковых. (Так, увеличение частоты звука в 10 раз увеличит cп в 100 раз, что уменьшит дальность локации в 100 раз). Поэтому, коэффициент затухания c приводят к установленной частоте (например, 2 МГц как в табл. 5.5), либо вводят параметр c/f2.
Таблица 5.5. Коэффициенты затухания продольных УЗ волн в некоторых средах
| c, дБ/м | Материал | Дальность проникновения Lmax, м |
| 0,1 ... 10 | Алюминий, магний, сталь, фарфор | 1 ... 10 |
| 10 ... 100 | Полистирол, чугун, медь, бронза | 0,1 ... 1 |
| > 100 | Резина, медь, дерево, керамика | 0 ... 0,1 |
Отражение и рассеяние УЗ на неоднородностях среды позволяют формировать в оптически непрозрачных средах звуковые изображения предметов, используя звуковые фокусирующие системы подобно тому, как это делается с помощью световых лучей. Процесс фокусирования УЗ волн посредством акустических линз, рефлекторов и с помощью излучателей вогнутой формы возможен лишь при: l<< dхар. Фокусировка УЗ позволяет получать звуковые изображения на дисперсионных средах, например, в системах звуковидения и акустической голографии, а также концентрировать звуковую энергию. При этом в среде получают столь высокие значения интенсивности звука, которых на поверхности обычных УЗ излучателей достичь невозможно. С помощью фокусирующих систем можно формировать заданные характеристики направленности излучателей и управлять ими.
5.3.3. Направленность и модуляция в акустической локации
 При построении АЛС необходимо учитывать, что Н проявляется только в дальней зоне излучения (или зоне Фраунгофера) при r ³ Lд. Характеристика Н датчиков АЛС D(r) описывает отношение давлений p, развиваемых в этой зоне на одном и том же расстоянии l от центра датчика в направлении, определяемом произвольным радиус-вектором r и некоторым фиксированным R0:
При построении АЛС необходимо учитывать, что Н проявляется только в дальней зоне излучения (или зоне Фраунгофера) при r ³ Lд. Характеристика Н датчиков АЛС D(r) описывает отношение давлений p, развиваемых в этой зоне на одном и том же расстоянии l от центра датчика в направлении, определяемом произвольным радиус-вектором r и некоторым фиксированным R0:
D(r) = p(r)/p(R0).
Амплитудная характеристика Н АЛС R(r) в функции аргумента a зависит от волнового размера излучателя d/l (рис. 5.37).
О параметрах Н УЗ можно говорить, если диаметр излучателя в несколько раз превышает его длину волны. Так, для частоты УЗ сигнала 60 кГц, когда l = 5,5 мм, Н создается излучателем диаметром не менее 20 мм. (Например, при d/l = 4 ширина диаграммы Н Da = 300).
Учитывая то, что Н пропорциональна частоте сигнала, а затухание пропорционально квадрату частоты, для УЗ локации в воздушной среде обычно используют частоты 30 ... 100 кГц.
 При оценке Н в АЛС также как и других ЛИС используется коэффициент концентрации (направленного действия) - КНД. Он определяется как отношение интенсивности звука, создаваемой на расстоянии l > Lд в направлении главного максимума J^, к интенсивности гипотетического ненаправленного излучателя J с такой же излучаемой мощностью на том же расстоянии l: Kнд = J^/J. Для нахождения Kнд применяется расчетная формула:
При оценке Н в АЛС также как и других ЛИС используется коэффициент концентрации (направленного действия) - КНД. Он определяется как отношение интенсивности звука, создаваемой на расстоянии l > Lд в направлении главного максимума J^, к интенсивности гипотетического ненаправленного излучателя J с такой же излучаемой мощностью на том же расстоянии l: Kнд = J^/J. Для нахождения Kнд применяется расчетная формула:
где W - мощность излучателя, p(R0) - амплитуда звукового давления в направлении R0.
Это выражение упрощается, если для излучателя справедлива модель плоского поршня в жестком экране. Тогда при $ > l2 ($ - площадь излучающей поверхности): Kнд = 4pS/l2. Уровень добавочных максимумов по отношению к главному в этом случае, составляет ~ 0,13.
В активных АЛС, приемник УЗ воспринимает сигнал, посланный собственным излучателем и отраженный от объекта. Чем выше Н излучателя, тем меньше размер «пятна озвучивания» на объекте (рис. 5.38). Этот параметр, характеризуемый диаметром dпятна, увеличивается с расстоянием и даже при малых L превышает 2 dизл. Так, при лоцировании плоского объекта на расстоянии 3 м на несущей частоте f = 30 кГц диаметр «пятна озвучивания» dпятна составляет 4,7 см, а на f = 120 кГц - 2,5 см. Уровень сигнала, полученного приемником, зависит от отражательной способности и формы объекта, и в среднем, в 100 …1000 раз меньше излучаемого сигнала. Наилучшим для лоцирования был бы вогнутый сферический объект с таким радиусом кривизны, который был бы равен расстоянию от поверхности до приемника.
 В АЛС используют различные виды МК, выбор которой зависит от назначения системы и ее радиуса действия. Например, для акустических дальномеров, работающих в ближней зоне (до 1 м), обычно применяется непрерывная ЧМ или ФМ. В дальномерах же среднего радиуса действия (более 2 м) предпочтение отдается импульсному излучению на несущей частоте. Этот тип МК нашел особенно широкое применение в задачах звуковой локации и связи. Как уже отмечалось, ИМ позволяет строить энергетически эффективные многоканальные АЛС. Пример уплотнения частотного канала и организации временной селекции при ИМ со скважностью q = 100, был рассмотрен в разделе 5.1.2. Подобный подход позволяет разместить в одном частотном диапазоне несколько десятков каналов УЗ связи.
В АЛС используют различные виды МК, выбор которой зависит от назначения системы и ее радиуса действия. Например, для акустических дальномеров, работающих в ближней зоне (до 1 м), обычно применяется непрерывная ЧМ или ФМ. В дальномерах же среднего радиуса действия (более 2 м) предпочтение отдается импульсному излучению на несущей частоте. Этот тип МК нашел особенно широкое применение в задачах звуковой локации и связи. Как уже отмечалось, ИМ позволяет строить энергетически эффективные многоканальные АЛС. Пример уплотнения частотного канала и организации временной селекции при ИМ со скважностью q = 100, был рассмотрен в разделе 5.1.2. Подобный подход позволяет разместить в одном частотном диапазоне несколько десятков каналов УЗ связи.
Спектр УЗ сигнала обычно строится в координатах «звуковое давление (или интенсивность) - частота». Для ИМ характерен сплошной спектр, для непрерывной модуляции - комбинированный, содержащий линии и сплошные участки. В целом, спектр ИМ сигнала шире, чем АМ или ЧМ, хотя в любом случае, большая часть энергии сигнала (основная площадь спектра) сосредоточена в области главных гармоник. В качестве примера на рис. 5.39 представлен спектр прямоугольного импульса (без несущей частоты) продолжительностью T ~ 0,3 мс. Как видно из графика основная мощность сигнала лежит в области до ~ 2 кГц. Полоса пропускания приемника УЗ сигнала B, определяющая ширину его спектра, при ИМ выбирается из условия: B = fг £ 1/10T, где fг - верхняя граничная частота приемника. В целом ИМ на несущей частоте, обладает большей эффективностью, по сравнению с ИМ без несущей. Достоинством такой передачи является большая направленность излучения, обусловленная наличием высокочастотной составляющей, а также лучшая помехозащищенность сигнала. В частности, разрешающая способность акустического дальномера достигает 0,1% от его диапазона измерения. При этом несущую частоту сигнала выбирают вдали от основных акустических частот. В ряде случаев, особенно в системах акустической связи нашли применение также и методы непрерывной МК. Использование в АЛС непрерывной МК приводит к уменьшению ширины спектра сигнала, и, следовательно, улучшению избирательности канала передачи информации и увеличению отношения сигнал/шум.
5.3.4. Датчики и системы акустической локации
Датчики АЛС классифицируются по двум основным признакам:
1.  по назначению: излучатели и приемники;
по назначению: излучатели и приемники;
2. по принципу действия: генераторы и параметрические преобразователи
Рассмотрим сначала излучатели акустической энергии. В излучателях генераторного типа колебания возбуждаются из-за наличия препятствий на пути постоянного потока - струи газа или жидкости (к ним относятся сирены, свистки). В параметрических излучателях - заданные колебания электрического напряжения или тока преобразуются в механические колебания твердого тела, которое и излучает в окружающую среду акустические волны.
Жидкостные механические излучатели УЗ часто основываются на возбуждении колебаний твердой излучающей системы при натекании на нее струи. Они дают относительно дешевую УЗ энергию на частотах до 30 ... 40 кГц при интенсивности вблизи от излучателя до 10-3 Вт/м2. (Такие излучатели используются в звуковом и низкочастотном УЗ диапазонах). Недостатком излучателей-генераторов является невозможность получения монохроматического излучения, а также излучения звуковых сигналов строго заданной формы: спектр их сложен и определяется конструкцией и режимом работы. КПД генераторов составляет 5... 50%, при общей мощности излучения от нескольких Вт до десятков кВт.
К параметрическим излучателям относятся УЗ излучатели и громкоговорители.
 Эффективность излучателя зависит от соотношения между его размерами и длиной волны. Точные решения получены только для идеальных моделей «большого поршня», монополя и ряда других. В частности, полная излученная мощность W «большого поршня» ($ > l2) равна:
Эффективность излучателя зависит от соотношения между его размерами и длиной волны. Точные решения получены только для идеальных моделей «большого поршня», монополя и ряда других. В частности, полная излученная мощность W «большого поршня» ($ > l2) равна:

При расчетах реальных АЛС чаще всего пользуются моделями излучателей 0-го, 1-го, 2-го и т.д. порядка. Излучатель 0-го порядка - монополь, представляет собой пульсирующую сферу конечного радиуса r, которая создает в окружающей среде сферические волны (рис. 5.40а). В случае если его размеры не удовлетворяют условию $ > l2, мощность излучения определяют приблизительной формулой:
W » rck2V2/8p,
где k = 2p/l - волновое число, V - объемная скорость излучателя, равная V = 4pr2v. Поскольку, обычно kr << 1, следовательно, при заданной частоте мощность излучения определяется объемной скоростью излучателя, независимо от его размеров. Это выражение применяется и при расчете других малых излучателей, не имеющих сферической симметрии. Другим простейшим излучателем является акустический диполь (излучатель 1-го порядка), представляющий собой сферу, осциллирующую около положения равновесия (рис. 5.40б). Его излучение не имеет сферической симметрии и характеризуется направленностью. Диаграмма направленности диполя - тело вращения в виде восьмерки. Промышленные УЗ излучатели, широко применяемые в системах гидроакустической связи, подводных роботах и других подводных системах, представляют собой наборную конструкцию (пакет) из диполей. Диполи, как правило, идентичны, и, следовательно, имеют одинаковые диаграммы Н, а их соединение в излучателе позволяет сформировать диаграмму Н нуждой формы. На рис. 5.41а представлены два гидроакустических излучателя, построенных на продольном и поперечном пьезоэффекте. Оба представляют собой короткие полые цилиндры (кольца); электроды первого установлены снаружи и изнутри цилиндра, а второго собраны из отдельных секций. Здесь же показана частотная характеристика излучателя с максимумом на частоте 40 кГц (рис. 5.41б), а также зависимость ширины излучаемого спектра от отношения толщины излучателя d к его среднему диаметру Rср (рис. 5.41в).
Некоторые характеристики громкоговорителей представлены в табл. 5.6.
Таблица 5.6. Пьезокерамические громкоговорители
| Модель | Df, кГц | C, нФ | Uп, В | m, г | Габариты, мм |
| SCS-17 | 700 … 8000 | 20 | 5 … 30 | 1,7 | 22´9,7 |
| SCS-77 | 150 … 20000 | 380 | 5 … 30 | 43 | 77´10 |
Примечание. Модели SCS разработаны фирмой Sonitron, США.
Приемники звука, как правило, также используют параметрический принцип, и, в зависимости от частотного диапазона разделяются на две группы: УЗ приемники (в том числе, гидрофоны) и микрофоны.

 Наиболее распространенный класс акустических датчиков составляют обратимые параметрические электроакустические преобразователи - ЭАП. Они обладают линейной функцией преобразования, что позволяет точно воспроизводить форму возбуждающего сигнала, как в режиме приема, так и излучения. В отличие от акустических излучателей и приемников, ЭАП обладают сравнительно узкой частотной характеристикой и обычно используются для работы на определенной частоте в мобильных системах связи. Для повышения эффективности в их конструкциях применяются резонансные явления. В большинстве конструкций ЭАП осуществляется двойное преобразование информации (рис. 5.42): электромеханическое (U, i « F, v) и механоакустическое (F, v « p, v). Задачей теории расчета ЭАП является определение звукового давления p в поле излучателя по известным значениям напряжения U и тока i на его входе, и наоборот, расчет напряжения или тока на выходе приемника по заданному полю (давлению p и колебательной скорости v). Таким образом, существенным элементом ЭАП, определяющим его КПД и направленность является механическая колебательная система. Как правило, в качестве колебательных систем используются стержни, пластины, сферы, полые цилиндры и другие оболочки, рассчитанные на вибрации заданного вида.
Наиболее распространенный класс акустических датчиков составляют обратимые параметрические электроакустические преобразователи - ЭАП. Они обладают линейной функцией преобразования, что позволяет точно воспроизводить форму возбуждающего сигнала, как в режиме приема, так и излучения. В отличие от акустических излучателей и приемников, ЭАП обладают сравнительно узкой частотной характеристикой и обычно используются для работы на определенной частоте в мобильных системах связи. Для повышения эффективности в их конструкциях применяются резонансные явления. В большинстве конструкций ЭАП осуществляется двойное преобразование информации (рис. 5.42): электромеханическое (U, i « F, v) и механоакустическое (F, v « p, v). Задачей теории расчета ЭАП является определение звукового давления p в поле излучателя по известным значениям напряжения U и тока i на его входе, и наоборот, расчет напряжения или тока на выходе приемника по заданному полю (давлению p и колебательной скорости v). Таким образом, существенным элементом ЭАП, определяющим его КПД и направленность является механическая колебательная система. Как правило, в качестве колебательных систем используются стержни, пластины, сферы, полые цилиндры и другие оболочки, рассчитанные на вибрации заданного вида.
ЭАП АЛС строятся на базе ДДВ. В рабочем диапазоне частот применяются пьезоэлектрические, магнитострикционные, электростатические и электродинамические ЭАП.
Самым распространенным способом преобразования информации в ЭАП является прямой и обратный пьезоэффект. В основе работы пьезоэлектрических ЭАП (ПЭАП) в режиме излучения лежит принцип обратного пьезоэффекта, в режиме приема - прямого. До недавнего времени ПЭАП разрабатывались преимущественно для систем акустической связи УЗ диапазона частот (30 … 100 кГц). Механическая колебательная система обычно выполнялась в виде составной конструкции, включающей пьезокерамические (или кристаллические) диски или стержни, зажатые между двумя металлическими блоками. В качестве материалов ПЭАП наиболее широко используются пьезокерамики на основе цирконата-титоната свинца - ЦТС. Примером является цилиндрический излучатель диаметром 26 и толщиной 20 мм из ЦТС-19. На резонансной частоте 60 кГц в нем создаются торцевые колебания амплитудой ~ 1 мкм, при излучаемой акустической мощности 10-2 Вт. Другой пример приведен на рис. 5.43. Здесь представлена конструкция дискового преобразователя направленного излучения. Направленность достигается использованием акустической линзы и демпфера.
В настоящее время появились также и ПЭАП звукового диапазона (100 Гц … 20 кГц), используемые как широкополосные пьезокерамические громкоговорители. Первый такой преобразователь, по видимому, был выпущен в 1997 г. фирмой «Sonitron». Сейчас малогабаритные громкоговорители активно применяются в оборудовании связи, устройствах звукозаписи, системах мультимедиа и бытовой технике. Они обладают высокой стабильностью характеристик в широком диапазоне частот и температур, а также малым потреблением энергии и высоким КПД. Обобщенная частотная характеристика громкоговорителя имеет вид, показанный на рис. 5.45.
 Частотные свойства ПЭАП зависят от условий эксплуатации - в некоторых случаях их делают резонансными, в других - широкополосными. Исходя из этого, выбирают и размеры ПЭАП. Так, например, размер подводного УЗ приемника - гидрофона рассчитывается из условия, чтобы его резонансная частота была несколько выше рабочего диапазона частот. Это позволяет гидрофон диаметром несколько миллиметров использовать для приема без искажений сигналов в диапазоне частот ~ 102 … 106 (рис. 5.44).
Частотные свойства ПЭАП зависят от условий эксплуатации - в некоторых случаях их делают резонансными, в других - широкополосными. Исходя из этого, выбирают и размеры ПЭАП. Так, например, размер подводного УЗ приемника - гидрофона рассчитывается из условия, чтобы его резонансная частота была несколько выше рабочего диапазона частот. Это позволяет гидрофон диаметром несколько миллиметров использовать для приема без искажений сигналов в диапазоне частот ~ 102 … 106 (рис. 5.44).
Вообще говоря, ПЭАП также можно применять для излучения и приема УЗ волн в высокочастотном и гиперзвуковом диапазонах частот. Основная трудность при этом заключается в обеспечении их весьма малой резонансной толщины. В качестве материалов ПЭАП высокочастотного диапазона используют пьезополупроводниковые кристаллы типа сульфида кадмия, окиси цинка, а в области гиперзвука (1 ... 10 ГГц) - пленочные материалы на той же базе.
Самым распространенным типом акустического приемника является микрофон. В зависимости от принципа действия микрофоны разделяют на следующие типы: порошковые угольные, электродинамические, электростатические (конденсаторные и электретные), пьезоэлектрические, электромагнитные и полупроводниковые.
Немного истории. Порошковый микрофон был разработан русским изобретателем М. Махальским в 1878 г., и независимо от него П. Голубицким в 1883 г. Сейчас используется только в телефонии. Электродинамический микрофон катушечного типа изобрели американские ученые Э. Венте и А. Терас в 1931 г. В нем применена фольговая диафрагма или очень тонкая (1 ... 3 мкм) фольговая ленточка. Конденсаторный микрофон был также изобретен Э. Венте в 1917 г., а электретный в 1923 г. японцем Егути. Отличие электретного от конденсаторного заключается в том, что роль неподвижной обкладки конденсатора и источника постоянного напряжения в нем играет пластина из электрета. Недостатком его является высокое выходное сопротивление, что требует применения истокового повторителя. Первый пьезоэлектрический микрофон был создан в 1925 г. советскими учеными С. Ржевкиным и А. Яковлевым на базе кристалла сегнетовой соли. Электромагнитные микрофоны конструктивно похожи на электродинамические (только используют постоянные магниты, и мембрана жестко связана с якорем магнита). Они также как и порошковые используются только в простых системах.
 Современные профессиональные микрофоны, как правило, используют электродинамические и электростатические (чаще - электретные) ЭАП и применяются на самых низких УЗ частотах, а также в диапазоне слышимых частот. Они строятся в виде последовательной цепи преобразователей, а их схема, в отличие от простых ЭАП (рис. 5.42), содержит четыре каскада преобразования информации - акустического (приемного), акустикомеханического, электромеханического (преобразующего колебательную скорость для динамических микрофонов или смещение для конденсаторных в ЭДС) и электрического (согласующего). Направленность формируется первыми двумя звеньями, причем в зависимости от нее различают два типа микрофонов (рис. 5.46а):
Современные профессиональные микрофоны, как правило, используют электродинамические и электростатические (чаще - электретные) ЭАП и применяются на самых низких УЗ частотах, а также в диапазоне слышимых частот. Они строятся в виде последовательной цепи преобразователей, а их схема, в отличие от простых ЭАП (рис. 5.42), содержит четыре каскада преобразования информации - акустического (приемного), акустикомеханического, электромеханического (преобразующего колебательную скорость для динамических микрофонов или смещение для конденсаторных в ЭДС) и электрического (согласующего). Направленность формируется первыми двумя звеньями, причем в зависимости от нее различают два типа микрофонов (рис. 5.46а):
· ненаправленные (нулевого порядка, круговые), называемые также приемниками давления;
· направленные (градиентные). Для них характерны две основные схемы:
· с двумя симметричными акустическими входами (их называют двунаправленными - диаграмма Н имеет форму восьмерки);
· с двумя или более несимметричными входами (в этом случае они являются однонаправленными). Примером является кардиоида.
Ненаправленные микрофоны не подавляют шума (их индекс направленности равен нулю).
В особую группу выделяют комбинированные микрофоны, или микрофоны с переменной диаграммой Н. В них Н деформируется изменением величины напряжения поляризации на электродах.
Микрофоны на основе электродинамических ЭАП в зависимости от типа колеблющегося элемента разделяются на катушечные (примером являются отечественные модели - ненаправленный МД-83, и односторонне направленные МД-97 и МД-91), а также ленточные. Ленточный микрофон обладает наиболее естественной передачей звука. На рис. 5.46б приведена диаграмма Н микрофона МД-83 на разных частотах сигнала от 50 до 10000 Гц.
Микрофоны на конденсаторных ЭАП (КЭАП) бывают одно- и двух мембранные. К первым относится кардиоидный электретный микрофон МКЭ-13М и ненаправленный МКЭ-400. Двухмембранные микрофоны (среди них отечественный МК51, а также U87i и U89i фирмы Neumann) позволяют изменять форму диаграммы Н от круговой, через кардиоиду к восьмерке.
КЭАП, в отличии от ПЭАП и МЭАП обладают широкой полосой пропускания.
Отдельный класс микрофонов составляют направленные микрофоны, использующие резонансные схемы и параболические отражатели. Серийно выпускается несколько моделей обоих типов с диапазоном частот от 100 ... 250 Гц до 18 ... 22 кГц. Острая «игольчатая» диаграмма направленности микрофона AD-9 с параболическим отражателем позволяет контролировать речь на расстоянии до 1500 м.КНД для данного типа микрофонов определяется зависимостью:
Kнд = 4pSэ/l2,
где Sэ - эффективная поверхность антенны.
В табл. 5.7 представлены типовые характеристики микрофонов разных типов. Обозначено: var Df - изменение частотной характеристики, S - чувствительность.
Таблица 5.7. Сравнительный анализ типов микрофонов
| Тип | Df, кГц | var Df, дБ | S, мВм2/н |
| Порошковый | 0,3 ... 3,4 | 20 | 1000 |
| Электродинамический | 0,03 ...15 | 12 | 1 |
| Конденсаторный | 0,03 ...15 | 5 | 5 |
| Электретный | 0,02 ... 18 | 2 | 1 |
| Пьезоэлектрический | 0,1 ... 5 | 15 | 50 |
| Электромагнитный | 0,3 ... 5 | 20 | 5 |

 Наряду с пьезоэлектрическим другим распространенным способом преобразования информации в ЭАП является магнитострикция, особенно широко применяемая в подводных ЛИС. Основу магнитострикционных ЭАП (МЭАП) составляет наборный сердечник из магнитоупругого материала (никеля, специальных сплавов - пьезокобальтов или ферритов) в форме стержня или кольца (рис. 5.47). В режиме излучения используется непосредственно магнитострикционный эффект - деформация ферромагнетика, помещенного в переменное магнитное поле. Режим приема основан на магнитоупругом эффекте - переменные деформации вызывают изменение магнитной проницаемости ферромагнетика и появлению ЭДС. МЭАП работают приблизительно в том же частотном диапазоне, но обладают значительно большей акустической мощностью. Например, пьезокобальтовый УЗ излучатель диаметром 60 мм и высотой 40 мм на частоте 45 кГц развивает акустическую мощность ~ 5 Вт с амплитудой колебаний 10 мкм. Столь высокая величина деформаций материала МЭАП приводит к его быстрому разрушению в воздушной среде; поэтому их используют в качестве гидроакустических излучателей. КПД таких излучателей (также как и ПЭАП) при работе в жидкости и твердых телах в диапазонах низких и средних частот достигает 80 ... 90%. КПД МЭАП гиперзвукового диапазона существенно ниже. При их построении используются специальные материалы на основе магнитострикционных пленок из никеля, пермаллоя или др.
Наряду с пьезоэлектрическим другим распространенным способом преобразования информации в ЭАП является магнитострикция, особенно широко применяемая в подводных ЛИС. Основу магнитострикционных ЭАП (МЭАП) составляет наборный сердечник из магнитоупругого материала (никеля, специальных сплавов - пьезокобальтов или ферритов) в форме стержня или кольца (рис. 5.47). В режиме излучения используется непосредственно магнитострикционный эффект - деформация ферромагнетика, помещенного в переменное магнитное поле. Режим приема основан на магнитоупругом эффекте - переменные деформации вызывают изменение магнитной проницаемости ферромагнетика и появлению ЭДС. МЭАП работают приблизительно в том же частотном диапазоне, но обладают значительно большей акустической мощностью. Например, пьезокобальтовый УЗ излучатель диаметром 60 мм и высотой 40 мм на частоте 45 кГц развивает акустическую мощность ~ 5 Вт с амплитудой колебаний 10 мкм. Столь высокая величина деформаций материала МЭАП приводит к его быстрому разрушению в воздушной среде; поэтому их используют в качестве гидроакустических излучателей. КПД таких излучателей (также как и ПЭАП) при работе в жидкости и твердых телах в диапазонах низких и средних частот достигает 80 ... 90%. КПД МЭАП гиперзвукового диапазона существенно ниже. При их построении используются специальные материалы на основе магнитострикционных пленок из никеля, пермаллоя или др.
Расчет датчиков АЛС основан на уравнениях обратимого пьезо- и магнитоупругого преобразования (рис. 5.48). Учитывая динамический характер преобразователей, все переменные в выражениях должны быть записаны в комплексной форме [ ]. Применительно к пьезопреобразованию получим:
I = YE + Aоv и F = - AпE + zv,
Здесь  и
и  - переменные ток и напряжение на обкладках ПЭАП;
- переменные ток и напряжение на обкладках ПЭАП;  - проводимость механически заторможенного преобразователя;
- проводимость механически заторможенного преобразователя;  и
и  - прямой и обратный факторы силы соответственно;
- прямой и обратный факторы силы соответственно;  - механический импеданс колебательной части ПЭАП;
- механический импеданс колебательной части ПЭАП;  - колебательная скорость его поверхности,
- колебательная скорость его поверхности,  - напряженность поля,
- напряженность поля,  - переменная сила.
- переменная сила.
Уравнение обратимого магнитострикционного преобразования записывается похожим образом:
E = zI + Aоv и F = - AпI + zv
Указанные выражения получили название электромеханических уравнений обратимых преобразователей. Они связывают механические конструктивные параметры преобразователя с электрическими характеристиками сигнала.
Для определения функции преобразования обратимого ПЭАП используется выражение, связывающее напряженность поля Е с относительной линейной деформацией Dl/l:  , где
, где  и eа - пьезоэлектрическая постоянная и диэлектрическая проницаемость материала, l - расстояние между обкладками, kп - размерный коэффициент. Поскольку электрическое напряжение на обкладках ПЭАП U = E l, то его функция преобразования может быть представлена в виде:
и eа - пьезоэлектрическая постоянная и диэлектрическая проницаемость материала, l - расстояние между обкладками, kп - размерный коэффициент. Поскольку электрическое напряжение на обкладках ПЭАП U = E l, то его функция преобразования может быть представлена в виде:
 ,
,
причем U и Dl являются комплексными величинами.
Для обратимого МЭАП функция преобразования описывается эмпирической зависимостью:
 Dl = 4p kм mcm2H2
Dl = 4p kм mcm2H2
где Н - напряженность магнитного поля, mc, mа - магнитострикционная постоянная и магнитная проницаемость сердечника соответственно, kм - размерный коэффициент. (Параметр mc для поляризованного МЭАП достигает значения ~ 0,2 Н/м2 Тл, при напряженности поля ~ 1600 А/м. Напомним, что 1А/м = 1,25 10-2 Э). Существенно, что в обоих выражениях переменные U, Dl и H также являются комплексными величинами.
 Интенсивность излучения J достигает нескольких Вт/см2 у серийных пьезоизлучателей и нескольких десятков Вт/см2 у магнитострикционных: она ограничивается прочностью и нелинейными свойствами материала излучателей. Для увеличения интенсивности и амплитуды колебаний используют импульсные режимы работы излучателей (рис. 5.49), а также применяют специальные УЗ концентраторы, представляющие собой фокусирующую систему, излучающую сходящуюся сферическую волну. В фокусе подобных концентраторов интенсивность достигает значений 103 ... 105 Вт/см2 на частотах ~ 0,1 ... 10 МГц. Они используются, в частности, при проведении нейрохирургических операций, когда необходимо обеспечить воздействие УЗ на малую область
Интенсивность излучения J достигает нескольких Вт/см2 у серийных пьезоизлучателей и нескольких десятков Вт/см2 у магнитострикционных: она ограничивается прочностью и нелинейными свойствами материала излучателей. Для увеличения интенсивности и амплитуды колебаний используют импульсные режимы работы излучателей (рис. 5.49), а также применяют специальные УЗ концентраторы, представляющие собой фокусирующую систему, излучающую сходящуюся сферическую волну. В фокусе подобных концентраторов интенсивность достигает значений 103 ... 105 Вт/см2 на частотах ~ 0,1 ... 10 МГц. Они используются, в частности, при проведении нейрохирургических операций, когда необходимо обеспечить воздействие УЗ на малую область  пространства (рис. 5.50). Для низкочастотного диапазона разработаны концентраторы в виде резонансных стержней переменного сечения, позволяющие получать амплитуды смещения до 50 ... 80 мкм. Их применяют при УЗ механической обработке, сварке, дроблении материалов и т.п.
пространства (рис. 5.50). Для низкочастотного диапазона разработаны концентраторы в виде резонансных стержней переменного сечения, позволяющие получать амплитуды смещения до 50 ... 80 мкм. Их применяют при УЗ механической обработке, сварке, дроблении материалов и т.п.
Примеры некоторых распространенных моделей ЭАП приведены в табл. 5.8. Символом Df обозначена ширина частотного спектра.
Таблица 5.8. Примеры промышленных обратимых ЭАП
| Модель | Тип | fрез, кГц | Df, кГц | Æ, мм |
| МУП-1 | ПЭДП | 40 | 0,6 ...1,0 | 18 |
| УЗП-2 | КЭДП | 40 ... 70 | 15 | |
| R-160 | КЭДП | 0,02 ... 100 | 6 |
Примечание. Датчик R-160 разработан фирмой Rion Cо, Япония (Рзв max = 160дб).
Рассмотрим несколько типовых примеров применения АЛС. Как правило, в промышленности, робототехнике и специальных задачах они выполняют функции УЗ дальномеров или локаторов. Первые предназначены для измерения дальности до объекта или препятствия в воздушной или жидкой среде, вторые - для обнаружения препятствий распространению УЗ волн. Этот принцип, в том числе, используют разнообразные УЗ дефектоскопы, позволяющие определять нарушения сплошности в разнообразных твердых средах (металлических предметах, строительных конструкциях и др.). Так, например, разработанные на основе традиционного «эхо-метода» приборы обнаруживают дефекты размером ~ 0,05 мм при глубине залегания до 5м.
На рис. 5.51 приведена схема УЗ локатора, представляющего собой простой «индикатор препятствия». Устройство, предназначенное для определения препятствий в воздушной среде на расстоянии до 10 м, использует «эхо-метод» - сигнал посланный излучателем И отражаясь от препятствия воспринимается микрофоном М. Полученный сигнал усиливается транзистором VT3, детектируется цепочкой С3, VD1, VD2 и подается на реле Р.
Функциональная схема акустического дальномера, использующего обратимый ЭАП, приведена на рис. 5.52.
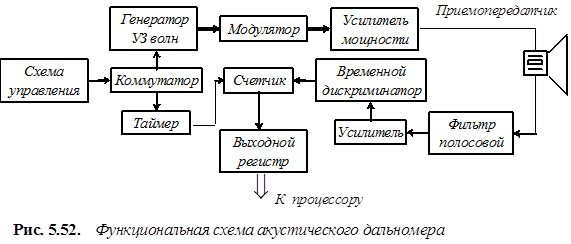
Схема управления переключает режимы работы дальномера - на излучение или прием. В первом случае, формируется посылка - ИМ сигнал с несущей частотой 50 … 120 кГц. Во втором, принятый и усиленный сигнал поступает на временной дискриминатор, вычисляющий задержку принятого сигнала по отношению к излученному. Дальномер определяет расстояние до предметов в пределах 0,2 … 80 м с погрешностью ~ 2%.
УЗ локаторы наведения широко используются в мобильных робототехнических комплексах, транспортных тележках и некоторых системах управления промышленных роботов. Все АЛС для подвижных средств используют различные насадки для работы в ближней и дальней зонах, а также различные режимы модуляции. В дальней зоне достаточно просто обнаружить препятствие, в то время как в ближней его нужно детерминировать. Обычно при  локации на средних и больших расстояниях применяется ИМ на несущей частоте, причем величина несущей и частота посылок уменьшаются по мере увеличения дальности до объекта. В частности, для дальностей до ~ 20 мм используется несущая частота 700 кГц с частотой повторения импульсов 100 Гц. Для измерения расстояний в диапазоне 0,1 ... 10 м достаточно несущей частоты 60 кГц и частоты повторения импульсов 10 Гц.
локации на средних и больших расстояниях применяется ИМ на несущей частоте, причем величина несущей и частота посылок уменьшаются по мере увеличения дальности до объекта. В частности, для дальностей до ~ 20 мм используется несущая частота 700 кГц с частотой повторения импульсов 100 Гц. Для измерения расстояний в диапазоне 0,1 ... 10 м достаточно несущей частоты 60 кГц и частоты повторения импульсов 10 Гц.
Работа на самых малых расстояниях и в режиме наведения требуют применения ФМ (рис. 5.53). В этом случае, прием отраженного сигнала осуществляется двумя приемниками, причем разность хода лучей вызывает разность фаз принятых сигналов. Так, если сигнал, полученный первым приемником, имеет вид U1 = U cos w0t, то для второго справедливо U2 = U cos (w0t-y), где фазовый сдвиг y = 2pD/l = (2pD/l) sin a и D - база приемников (расстояние между ними).
Для определения искомой величины y = y (a) используется фазовый детектор, на который поступают два сигнала: с первого приемника - через фазовращатель, и со второго - напрямую. (Фазовращатель изменяет фазу первого сигнала на p/2). Тогда после фазового детектора сигнал примет вид:
UФД = U cos (w0t-p/2) U cos (w0t-y) = 0,5U2 sin [2w0t-y)+ sin y].
Выделяя постоянную составляющую с помощью фильтра нижних частот получим в итоге:
Uвых = 0,5U2 sin y = 0,5U2 (2pD/l) sin a.
 При значениях a, где D/l sin a <<1, функция преобразования УЗ локатора наведения оказывается приблизительно линейной:
При значениях a, где D/l sin a <<1, функция преобразования УЗ локатора наведения оказывается приблизительно линейной:
Uвых » U2 2p(D/l) a.
Данный локатор наведения установлен на захватном устройстве окрасочного робота фирмы «Tralfa», Норвегия (рис. 5.54). Погрешность измерения не превышает 1,5%.
УЗ дальномеры разрабатываются многими фирмами. В частности, компания Polaroid (США) выпускает помехозащищенные дальномеры среднего действия диапазона 0,15 ... 10 м, частотный спектр которых включает четыре различных несущих частоты.
Основные характеристики некоторых моделей АЛС представлены в табл. 5.9. L - дальность, Da - ширина диаграммы направленности, e - погрешность.
Таблица 5.9. Примеры промышленных УЗ АЛС
| Модель | L, м | f, кГц | Da, 0 | e, % | m, кг | Габариты, мм |
| УТ-10ДР | 0,15 ... 9,99 | 40 | 20 | 5 | 2,5 | 400´400´210 |
| УТ-100РГ | 0,01 ... 1 | 1250 | 10 | 0,1 | 2,0 | 300´220´170 |
| УТ-65 | 0 ... 0,3 (толщина) | переменная | 1 | 0,5 | 165´85´40 | |
| M-942 | 0,001 ... 2 | 215 | 10 | 0,05 | 1,0 | |
| UC2000-F43 | 0,1 … 4,0 | 0,5 | 0,3 | 20´45´120 | ||
| RS/8,5 | 0,1 ... 6 | 140 | 0,3 | 0,7 |
Примечание.
1. Массогабаритные показатели отечественных АЛС учитывают блок электроники. (Масса преобразователя УТ-100 РГ - 0,.04 кг, размеры - Æ40´24 мм). В качестве излучателей и приемников используются пьезодатчики типа МУП.
2. Система M-942 разработана фирмой Microsonic, Германия, UC2000-F43 -фирмой Pepperl+Fuchs (Германия), RS/8,5 - Takk Ко, Япония (l = 8,5 мм, t = 10 мс).
5.3.5. АЛС специального назначения
 В последние годы АЛС находят широкое применение в ряде специальных отраслей: интроскопии, медицине, военном деле. Разрабатываемые изначально как отдельные приборы, эти средства все чаще включаются в состав автоматических диагностических устройств и роботов. Так, в задачах неразрушающего контроля в экстремальных условиях, например, при диагностике корпусов ядерных реакторов, для перемещения блоков УЗ аппаратуры используются программируемые манипуляторы и робототехнические комплексы. Связь робота с удаленной ЭВМ во избежании влияния электромагнитных помех осуществляется посредством оптического кабеля [ ]. В таких задачах реализуется прямая УЗ визуализация объекта контроля, путем его сканирования узким УЗ лучом. Минимальное время, необходимое для получения информации о структуре и геометрии объекта Тв определяется выражением:
В последние годы АЛС находят широкое применение в ряде специальных отраслей: интроскопии, медицине, военном деле. Разрабатываемые изначально как отдельные приборы, эти средства все чаще включаются в состав автоматических диагностических устройств и роботов. Так, в задачах неразрушающего контроля в экстремальных условиях, например, при диагностике корпусов ядерных реакторов, для перемещения блоков УЗ аппаратуры используются программируемые манипуляторы и робототехнические комплексы. Связь робота с удаленной ЭВМ во избежании влияния электромагнитных помех осуществляется посредством оптического кабеля [ ]. В таких задачах реализуется прямая УЗ визуализация объекта контроля, путем его сканирования узким УЗ лучом. Минимальное время, необходимое для получения информации о структуре и геометрии объекта Тв определяется выражением:
Тв = kв Lmax/c,
где Lmax - максимальная длина объекта в направлении распространения волн, kв - коэффициент, зависящий от метода визуализации (kв = 2, при использовании отраженных волн, kв = 1, в случае прямого прохождения).
 В простейшем случае одномерного сканирования объект облучается УЗ в импульсном режиме, а отраженные от неоднородностей сигналы воспринимаются обратимым ЭАП (рис. 5.55). Амплитуда сигнала зависит от многих факторов: длины волны l, затухания c, размеров дефекта и расстояния до него х. При качественных оценках амплитуда отраженного импульса u пропорциональна величине дефекта, а временной отрезок до него Тв - глубине его залегания х. Высокоинтенсивные УЗ устройства широко используются в медицине, что даже привело к появлению целой ее отрасли - УЗ хирургии. Фокусированное излучение, создаваемое УЗ концентраторами (рис. 5.50) целесообразно для создания локальных разрушений в глубинных тканях организма, например, в структурах головного мозга [ ]. Другой областью медицины являются УЗ исследования (УЗИ). Средствами УЗИ диагностируются патологии во внутриутробном развитии, в строении внутренних органов и т.д. (рис. 5.56) Чрезвычайно эффективна УЗ компьютерная томография, позволяющая получать двух- и трехмерные изображения различных областей организма. Схема прибора приведена на рис. 5.57. В томографе применяется обратимая УЗ матрица (многоэлементная решетка), содержащая до 10000 точечных преобразователей. Рабочая поверхность матрицы смазывается гелем и прикладывается непосредственно к телу пациента. Каждый из преобразователей формирует узкий пучок УЗ излучения в диапазоне частот 2 … 10 МГц, который, проходя сквозь мягкие ткани, отражается от более плотных. Устройства приемо-передачи и управления режимами обеспечивает временную селекцию сигналов и фокусировку излучения на конкретном органе. Для этого в конструкцию излучателя входит 2-х или более линзовый акустический объектив, формирующий звуковой рельеф контролируемого объекта (распределение звукового давления) в плоскости электроакустического преобразователя (рис. 5.56). Большую часть времени томограф работает на прием: время посылки составляет ~ 5 … 10% времени приема.
В простейшем случае одномерного сканирования объект облучается УЗ в импульсном режиме, а отраженные от неоднородностей сигналы воспринимаются обратимым ЭАП (рис. 5.55). Амплитуда сигнала зависит от многих факторов: длины волны l, затухания c, размеров дефекта и расстояния до него х. При качественных оценках амплитуда отраженного импульса u пропорциональна величине дефекта, а временной отрезок до него Тв - глубине его залегания х. Высокоинтенсивные УЗ устройства широко используются в медицине, что даже привело к появлению целой ее отрасли - УЗ хирургии. Фокусированное излучение, создаваемое УЗ концентраторами (рис. 5.50) целесообразно для создания локальных разрушений в глубинных тканях организма, например, в структурах головного мозга [ ]. Другой областью медицины являются УЗ исследования (УЗИ). Средствами УЗИ диагностируются патологии во внутриутробном развитии, в строении внутренних органов и т.д. (рис. 5.56) Чрезвычайно эффективна УЗ компьютерная томография, позволяющая получать двух- и трехмерные изображения различных областей организма. Схема прибора приведена на рис. 5.57. В томографе применяется обратимая УЗ матрица (многоэлементная решетка), содержащая до 10000 точечных преобразователей. Рабочая поверхность матрицы смазывается гелем и прикладывается непосредственно к телу пациента. Каждый из преобразователей формирует узкий пучок УЗ излучения в диапазоне частот 2 … 10 МГц, который, проходя сквозь мягкие ткани, отражается от более плотных. Устройства приемо-передачи и управления режимами обеспечивает временную селекцию сигналов и фокусировку излучения на конкретном органе. Для этого в конструкцию излучателя входит 2-х или более линзовый акустический объектив, формирующий звуковой рельеф контролируемого объекта (распределение звукового давления) в плоскости электроакустического преобразователя (рис. 5.56). Большую часть времени томограф работает на прием: время посылки составляет ~ 5 … 10% времени приема.
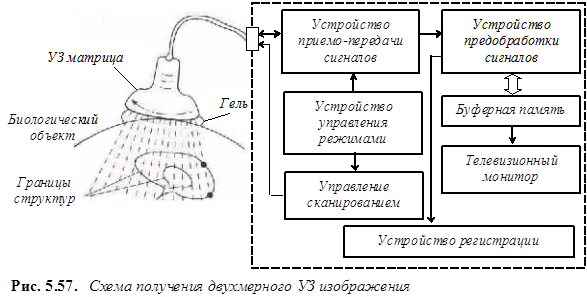
Схемы некоторых типовых УЗ преобразователей представлены в табл. 5.10.
Таблица 5.10. Излучатели и решетки медицинского применения
| Одноэлементный | Многоэлементные решетки | |||
| Одномерные | Двухмерные | |||
|
|
|
|
|
|
| Круглый | Кольцевая | Линейная | Конвексная | Плоская |





По похожим схемам строятся акустические микроскопы, работающие на частоте ~ 10 … 100 МГц и обладающие разрешающей способностью оптических микроскопов среднего класса. Для повышения чувствительности УЗ приборов используются схемы стетоскопов, обеспечивающие коэффициент усиления более 50000.
В завершении отметим основные достоинства АЛС, обеспечившие их широкое применение в самых разных областях техники. Это: многофункциональность, широкий диапазон измерений, простота и надежность технических решений. Недостатком АЛС является низкая помехозащищенность.
5.3.6. Основы цифровой записи звука
Во многих случаях, особенно в автономных режимах работы АЛС, возникает задача записи и хранения больших объемов звуковой информации. В наиболее простых системах производится аналоговая запись акустических сигналов на магнитофонную ленту с помощью традиционных или специальных магнитофонов, в других случаях используются системы цифровой записи. Важнейшим требованием к системам звукозаписи является необходимость обеспечения заданного динамического диапазона £д в широком спектре звуковых частот Df при наличии значительных акустических помех.
Для примера ограничимся более простой задачей - записью акустических сигналов звукового диапазона. Как известно, полоса частот звукового сигнала составляет 16 Гц ... 20 кГц. Динамический диапазон натурального звука £д определяется выражением £д = 20lg (pmax/p0), где p0 - давление, соответствующее порогу слышимости, а pmax - болевой порог. Значение £д на разных частотах различно, и на тестовой частоте 1000 Гц составляет 120 ... 140 дБ. Максимальная величина динамического диапазона £да, достигаемая в канале аналоговой записи/воспроизведения звука, даже со средствами шумоподавления не превышает 70 дБ. Больший диапазон £дц (свыше 100 дБ) достигается в цифровых системах записи. В этом случае практически исключаются нелинейные искажения (их значение не превосходит 0,05%) и детонация звука. В результате, для высококачественной записи и воспроизведение звука все больше используются именно цифровые системы звукозаписи.
Рассмотрим этот вопрос подробнее. Основополагающий принцип оцифровки сигналов был сформулирован в 1928 году Г. Найквистом, инженером телефонной компании AT&T. В соответствии с его теоремой «количество замеров должно, по крайней мере, вдвое превышать число деталей». Применительно к записи звука верхний порог сигнала составляет 20000 Гц. По критерию Найквиста замеры напряжения должны проводиться не реже 40000 раз в секунду. За стандартную частоту дискретизации fд принято значение 44100 Гц. «Некруглость» этого значения связана с тем, что в первых системах цифровой записи звука использовались бытовые видеомагнитофоны. В стандарте PAL видеомагнитофон записывает 50 изображений (полей) в секунду, причем в каждом поле содержится 294 телевизионных строки. Количество замеров звука на строку может быть любым целым числом, и при трех замерах на строку получается 50´294´3, что и составляет частоту 44100 Гц. (Интересно, что и видеомагнитофон, работающий в американском стандарте NTSC также годен для оцифровки звука, т.к. он записывает 60 полей по 245 строк в секунду и 60´245´3 по-прежнему равно 44100 Гц).
 Во всех системах звукозаписи изначальная запись звукового сигнала производится аналоговыми средствами. В цифровых системах аналоговый сигнал преобразуется в цифровую форму. Это преобразование описывается двумя основными параметрами: разрешением (квантованием по уровню) и частотой дискретизации fд.
Во всех системах звукозаписи изначальная запись звукового сигнала производится аналоговыми средствами. В цифровых системах аналоговый сигнал преобразуется в цифровую форму. Это преобразование описывается двумя основными параметрами: разрешением (квантованием по уровню) и частотой дискретизации fд.
Разрешение определяется необходимым динамическим диапазоном £д воспроизводимого сигнала. Например, динамический диапазон в 100 дБ требует не менее чем 16 битного квантования, т.е. разрешение составит 1/65535 максимальной амплитуды сигнала или 0,0015 дБ. Общепринятыми значениями fд являются 44,100 кГц (высокое качество), 22,050 кГц (среднее качество) и 11,025 кГц (низкое качество). Представление звука в цифровой форме предполагает значительное расширение полосы пропускания канала Df. Так, передача звука с полосой 20 кГц и динамическим диапазоном 100 дБ при частоте дискретизации fд = 44,1 кГц (без компрессии) требует потока информации DI/Dt равного: DI/Dt = 44,1 кГц ´ 16 бит = 706 кбит/с, что соответствует полосе частот Df = 768 кГц.
При цифровой записи стереозвука полоса расширяется вдвое. В этом случае, сначала производится аналоговая запись каждого канала на Hi-Fi магнитофон (обычно, формата VHS). Далее сигналы оцифровывается и записываются непосредственно на компакт диск с полосой частот Df = 768 кГц ´ 2 = 1536 кГц. Ясно, что объем двоичных данных, полученных в результате такой записи весьма велик. Так, для хранения всего 10 секунд аудиоинформации необходимо 15,3 Мб дискового пространства. При большем числе каналов эта проблема еще более обостряется. Поэтому, обычно информация на диск записывается не непосредственно, а в формате линейной импульсно-кодовой модуляции (ИКМ или PCM-Pulse Code Modulation). Линейная ИКМ является алгоритмом квантования и дискретизации, преобразующим аналоговые сигналы в цифровые дискретизированные величины, без сжатия частотного спектра (рис. 5.58). На этом рисунке в качестве иллюстрации приведен пример ИКМ с 8 интервалами квантования при 3-х битных словах и частотой дискретизации fд ³ 2fв где fв - наибольшая частота звукового сигнала. Алгоритм линейной ИКМ позволяет записывать сигналы с полосой пропускания до 6,144 Мбит/с, однако и этого для высококачественной многоканальной записи оказывается недостаточно. Более прогрессивный способ кодирования предполагает использование дифференциальной ИКМ (DPCM). В этой схеме кодируются разности между текущими значениями сигналов и предшествующими, а не сами дискретизированные величины. Поскольку значения этих разностей меньше дискретизированных значений, для кодирования той же самой звуковой информации можно использовать меньше битов (так, разница между двумя 16-битовыми величинами равна всего 4 битам). Исходя из этих соображений, дифференциальную ИКМ можно рассматривать и как схему сжатия звуковой информации.
Простейшим способом сжатия звукового сигнала без потерь является кодирование по алгоритму Хаффмена. Подробнее этот алгоритм будет рассмотрен в главе 6.
5.4. Оптические локационные системы
 Оптические информационные системы предназначены для получения информации об объектах, на основании анализа их оптических параметров в диапазоне видимых, ультрафиолетовых (УФ), инфракрасных (ИК) и рентгеновских волн. Такими параметрами объектов являются их спектральные и фотометрические характеристики, зависящие от строения и рельефа поверхности объекта, его температуры и агрегатного состояния, а также от длины волны и угла падения излучения. Оптическое излучение является, пожалуй, самым перспективным носителем информации, что позволяет использовать оптические локационные системы (ОЛС) в самых разнообразных задачах навигации, измерения и контроля, дефектоскопии и др. Наиболее широко ОЛС применяются в машино- и приборостроении, металлургии и химической промышленности, средствах связи, охранных системах и устройствах видеонаблюдения. ОЛС является также важнейшим элементом информационного обеспечения современных роботов. Исходя из перечня решаемых задач, все ОЛС можно разделить на два больших класса: системы локации и системы зрения.
Оптические информационные системы предназначены для получения информации об объектах, на основании анализа их оптических параметров в диапазоне видимых, ультрафиолетовых (УФ), инфракрасных (ИК) и рентгеновских волн. Такими параметрами объектов являются их спектральные и фотометрические характеристики, зависящие от строения и рельефа поверхности объекта, его температуры и агрегатного состояния, а также от длины волны и угла падения излучения. Оптическое излучение является, пожалуй, самым перспективным носителем информации, что позволяет использовать оптические локационные системы (ОЛС) в самых разнообразных задачах навигации, измерения и контроля, дефектоскопии и др. Наиболее широко ОЛС применяются в машино- и приборостроении, металлургии и химической промышленности, средствах связи, охранных системах и устройствах видеонаблюдения. ОЛС является также важнейшим элементом информационного обеспечения современных роботов. Исходя из перечня решаемых задач, все ОЛС можно разделить на два больших класса: системы локации и системы зрения.
Системы первого класса используются, главным образом, в задачах навигации и измерения, второго в задачах, связанных с получением и анализом образа объекта. ОЛС обеспечивают высокую точность измерения размеров объектов, расстояний и скоростей (погрешность составляет ~ 0,01 ... 0,1 %). Уровень выходного сигнала различных ОЛС лежит в пределах 10-3 … 105 Вт, что позволяет применять эти системы в средствах ближней и дальней локации.
ОЛС классифицируются по трем основным признакам:
1. по принципу локации: активные и пассивные.
2. по типу первичного преобразователя: вакуумные, оптронные и лазерные.
3. по взаимному расположению объекта и его изображения (рис. 5.59): каллиматорные - объект и его изображение находятся в бесконечности (рис. 5.59а), телескопические - в бесконечности расположен только объект (рис. 5.59б), проекционные - в бесконечности находится только изображение (рис. 5.59 в) и фокусирующие - объект и его изображение расположены на конечном расстоянии (рис. 5.59г).
Символами F и F’ обозначены переднее и заднее фокусные расстояния ОЛС. Фокусное расстояние - это важнейшая характеристика ОЛС, определяющая ее угол зрения и то, насколько крупным будет изображение объекта. (Так, для системы видеонаблюдения, чем больше ее фокусное расстояние, тем меньше угол зрения камеры и тем крупнее изображение объекта на мониторе).
Первичные преобразователи ОЛС, в отличие от АЛС необратимы и поэтому их принято разделять на источники и приемники излучения.
5.4.1. Теоретические основы оптики
В соответствии с открытой в 1864 году Д. Максвеллом электромагнитной теорией света - оптические явления создаются электромагнитными поперечными волнами, представляющими собой распространяющееся в пространстве электромагнитное поле. Скорость распространения оптического излучения в вакууме c0 составляет 299792,5 м/с.
Длины волн соответствующие различным диапазонам электромагнитного излучения приведены в табл. 5.11.
Таблица 5.11. Диапазоны электромагнитного излучения
| Длина волны l, м | Вид волн | Источник |
| 104 ... 10 | Радио (ДВ, СВ, КВ) | Генераторы |
| 10 ... 1 | Радио (УКВ), телевидение (ОВЧ) | Ламповые генераторы |
| 1 ... 10-1 | Телевидение (УВЧ) | |
| 10-1 … 10-3 | Микроволны | Магнетроны (клистроны) |
| 10-4 ... 10-6 | ИК свет | Колебания кристаллической решетки объекта |
| 8 10-7 ... 4 10-7 | Видимый свет | |
| 10-7 ... 10-8 | УФ свет | Колебания атомов |
| 10-9 ... 10-11 | Рентгеновские лучи | Электронные переходы |
| 10-12 (0,003 нм) | g-излучение | Колебания ядер |
 Большинство ОЛС, используемых в робототехнике и мехатронике, а также системы зрения функционируют в диапазоне видимых волн (рис. 5.60). Волны видимого диапазона субъективно описываются двумя переменными - яркостью (амплитудой сигнала) и цветом (длиной волны). Информация о яркости применяется во всех ОЛС, цвете - только в системах зрения. На рис. 5.60 буквами Ф, С, З, Ж, О, К обозначены поддиапазоны фиолетового, синего, зеленого, желтого, оранжевого и красного спектров излучения.
Большинство ОЛС, используемых в робототехнике и мехатронике, а также системы зрения функционируют в диапазоне видимых волн (рис. 5.60). Волны видимого диапазона субъективно описываются двумя переменными - яркостью (амплитудой сигнала) и цветом (длиной волны). Информация о яркости применяется во всех ОЛС, цвете - только в системах зрения. На рис. 5.60 буквами Ф, С, З, Ж, О, К обозначены поддиапазоны фиолетового, синего, зеленого, желтого, оранжевого и красного спектров излучения.
Оптическое излучение создается благодаря колебаниям большого числа элементарных осцилляторов. Излучения с длинами волн 380 … 750 нм образуют видимый свет. Источники света принято разделять на когерентные и некогерентные.
В некогерентных источниках света (естественных, а также вакуумных и оптронных) различные атомы активного вещества излучают волны, фазы и направления полей которых независимы и случайным образом меняются во времени.
Когерентные источники (например, лазер) излучают монохроматические волны. Световая монохроматическая волна создается взаимно ортогональными и синусоидально изменяющимися во времени и пространстве электрическим и магнитным полями, имеющими одинаковые частоты и перпендикулярными направлению ее распространения.
Когерентность излучения оценивается коэффициентом монохроматичности Kм = Df/f. Для естественных источников света Kм » 10-6, для лазера Kм = 10-16.
 Преобразователи ОЛС и систем технического зрения основаны на использовании принципов геометрической оптики. Данные принципы, сформулированные в XVIII веке, постулируют прямолинейное распространение волн. Это справедливо, если пренебречь дифракционными эффектами, т.е. полагая, что длина волны излучения l << Dхар. Под Dхар понимается наименьший размер препятствия; следовательно считается, что волна отражается от препятствия.
Преобразователи ОЛС и систем технического зрения основаны на использовании принципов геометрической оптики. Данные принципы, сформулированные в XVIII веке, постулируют прямолинейное распространение волн. Это справедливо, если пренебречь дифракционными эффектами, т.е. полагая, что длина волны излучения l << Dхар. Под Dхар понимается наименьший размер препятствия; следовательно считается, что волна отражается от препятствия.
Основу геометрической оптики составляют:
· закон взаимной независимости световых лучей;
· принцип наименьшего времени (известный как принцип П. Ферма).
Согласно этим положениям, световые лучи распространяются по прямым линиям и не взаимодействуют друг с другом. В качестве частных случаев принципа П. Ферма могут рассматриваться законы отражения и преломления света. Известно, что если луч света падает на границу раздела двух прозрачных сред с разными коэффициентами преломления n1 и n2, он отклоняется на угол, зависящий от угла падения. Все лучи, параллельные оптической оси сферической поверхности раздела преломляются так, что сходятся в фокусе (рис. 5.61).
 Скорость распространения с и длина световых волн в среде l определяются зависимостями:
Скорость распространения с и длина световых волн в среде l определяются зависимостями:


где n - показатель преломления среды (n > 1), n - частота излучения. Следовательно, скорость света в вакууме больше, чем в среде.
Показатели преломления и коэффициенты отражения kотр некоторых сред приведены в табл. 5.12.
Таблица 5.12. Основные оптические параметры некоторых сред
| Среда | n | kотр |
| Воздух | 1,0003 | |
| Вода (дистиллят) | 1,333 | |
| Кварцевое стекло | 1,458 | |
| Полиметилметакрилат (органическое стекло) | 1,49 | 0,04 |
| Непросветленное стекло | 1,5 … 2,0 | 0,05 … 0,1 |
| Стекло (просветленное) | 1,5 … 1,7 | 0,006…0,01 |
Для геометрической оптики справедливы те же законы, что и для геометрической акустики, что позволяет применить принципы проектирования АЛС к ОЛС. В частности, оптические излучения также характеризуются направленностью, а информативный параметр накладывается на несущую световую волну посредством модуляции. Свойства направленности формируются оптической фокусирующей системой, а из всех способов модуляции обычно используется импульсная.
Вообще говоря, линейная оптическая модель эксплуатируется преимущественно в задачах навигации, где длина волны излучения dхар << l. Здесь dхар - наибольший размер неоднородности среды распространения. При уменьшении l в излучении проявляются интерференционные и дифракционные эффекты, широко используемые в задачах дефектоскопии. Явления интерференции и дифракции открытые в начале XIX века О. Френелем и Т. Юнгом соответственно, а также обнаруженная Э. Малюсом поляризация, породили волновую оптику. Проведенные А. Эйнштейном в начале XX века исследования фотоэффекта вынудили ввести в рассмотрение дискретность и представить свет как пучок световых квантов - фотонов. Подобные явления рассматриваются в рамках квантовой оптики. Все три оптические модели (Геометрическая, волновая и квантовая) являются предельными случаями друг друга.
Световое излучение рассматривается в двух разделах физики: радио- и фотометрии. В первом случае, для его оценки применяются энергетические характеристики, во втором - визуальные. Визуальные параметры служат для описания световых процессов протекающих в диапазоне видимых волн и воспринимаемых глазом. Энергетические же используются, как правило, для тех излучений, которые лежат за пределами видимого спектра. Такое разделение вызвано тем, что действие видимого света на глаз зависит не только от физических параметров света - энергии излучения, частоты, спектрального состава, но и спектральной чувствительности Sc(l) глаза (рис. 5.62). Сплошной линией показана кривая средней спектральной чувствительности глаза, пунктир - спектр солнечного света. Максимум Sc(l) достигается для l = 5,0 10-7 м … 5,55 10-7 м (первое значение справедливо для черно-белого, так называемого скотопического зрения, второе - для цветного, или фотопического зрения).
Для перевода фотометрических характеристик в энергетические существует коэффициент видности kV, показывающий как меняется световое ощущение по всему видимому диапазону. Так как глаз имеет наибольшую видность (световое ощущение) Vmax к излучению с длиной волны l = 0,555 мкм, то
kV = Vl /Vmax.
В пределах диапазона 380 … 770 нм - kV меняется в 105 раз.
Таким образом, световое излучение описывается в двух системах: энергетической и визуальной. Различают следующие основные световые характеристики:
· энергия излучения Q (измеряется в Дж для энергетических расчетов, в Лм с - для световых);
· поток Ф = dQ/dt (Вт и Лм, соответственно);
· сила света (излучения) I = dФ/dq (Вт/ср - для энергетических расчетов, Кд - от англ. «свеча» - для световых);
· освещенность Á = dФ/dA (Вт/м2, лк)
· яркость (интенсивность) L = dI/dAn (Вт/ср м2 и Кд/м2 или НИТ (нт)),
где q - телесный угол; dAn - площадь ортогональной проекции светящегося элемента поверхности dA.
Применительно к световому потоку: 1 Вт излучения с длиной волны l = 5,55 10-7 м соответствует 683 Лм.
Важнейшей характеристикой в фотометрии является яркость. Для определения фотометрической яркости по известной величине яркости энергетической служат таблицы видности [ ].
Например, яркость потока гелий-аргонового лазера с l = 0,514 мкм и работающего в непрерывном режиме составляет ~ 1013 Вт/ср м2. По таблице видности фотометрическая яркость L составит ~ 4 1015 нт, что приблизительно в 2,5 106 раз больше, чем яркость солнца.
Способность глаза реагировать на очень большой диапазон яркостей DL получил название зрительной адаптации. В среднем для человека DL составляет ~2 10-6 … 2 105 нт. Свойство глаза восстанавливать световую чувствительность называется световой/темновой адаптацией. Она соответствует ~20 мин - для световой адаптации и ~ 60 мин - для темновой. Сравнительные параметры некоторых типовых источников света представлены в табл. 5.13.
Таблица 5.13. Сравнительные характеристики различных источников света
| Источник света | Яркость источника, Кд/м2 | Освещенность, лк |
| Фотографическая вспышка | 7 1010 | |
| Лампа накаливания | 6 106 | |
| Дневной свет | 104 | |
| Полная луна | 2 103 | 10-1 |
| Звездное небо | 10-3 | |
| Минимальная видимая яркость | 10-5 |
Порог чувствительности глаза характеризуется наименьшим количеством световой энергии, вызывающей световое раздражение. Величина порогового значения светового потока Фmin зависит от диаметра зрачка и при диаметре 8 мм составляет ~ 2 10-14 Лм.
5.4.2. Оптическая система и ее характеристики
 Основой ОЛС является совокупность оптических деталей (линз, зеркал, призм и т.д.) образующих изображение предметов на фотоприемнике, получившая название оптической системы. В оптической системе принято различать пространство предметов - область, в которой расположены объекты, и пространство изображений - область, в которой размещается изображение. Важнейшим элементом оптической системы является линза (рис. 5.63). В зависимости от комбинации образующих линзу поверхностей (выпуклой, вогнутой и плоской) различают более 10 типов линз. Наиболее распространенные типы линз имеют сферические сопрягаемые поверхности. В отдельных случаях для луп, конденсоров, светофильтров и т.д. используют линзы Френеля, обладающих ступенчатой поверхностью. (Минимальный размер ступенек составляет ~ 0,01 мм). Линзы Френеля выполняют методом прессования из пластмасс, что существенно снижает их стоимость.
Основой ОЛС является совокупность оптических деталей (линз, зеркал, призм и т.д.) образующих изображение предметов на фотоприемнике, получившая название оптической системы. В оптической системе принято различать пространство предметов - область, в которой расположены объекты, и пространство изображений - область, в которой размещается изображение. Важнейшим элементом оптической системы является линза (рис. 5.63). В зависимости от комбинации образующих линзу поверхностей (выпуклой, вогнутой и плоской) различают более 10 типов линз. Наиболее распространенные типы линз имеют сферические сопрягаемые поверхности. В отдельных случаях для луп, конденсоров, светофильтров и т.д. используют линзы Френеля, обладающих ступенчатой поверхностью. (Минимальный размер ступенек составляет ~ 0,01 мм). Линзы Френеля выполняют методом прессования из пластмасс, что существенно снижает их стоимость.
 Одной из самых совершенных оптических систем является глаз человека, состоящий из двух линз - роговицы и хрусталика, которые разделены слоем так называемой водянистой влаги (рис.5.64). Пространство изображений совпадает с сетчаткой глаза, на которой образуется действительное перевернутое изображение. Наивысшая острота зрения при дневном освещении достигается в области сетчатки, называемой центральной ямкой. В центральной ямке находится «желтое пятно», где концентрация цветовых рецепторов максимальна. Хрусталик является двояковыпуклой линзой (радиусы поверхностей в спокойном состоянии ~10 и 6 мм). Заднее фокусное расстояние в процессе работы изменяется ~ на 20%, варьируя, тем самым, и оптическую силу глаза. Это свойство глаза получило название аккомодации. Объемом (силой) аккомодации называют величину равную расстоянию между ближней и дальней точками ясного зрения. Он приблизительно соответствует 11 дп. (К 50 годам объем аккомодации уменьшается до 2,5 дп.).
Одной из самых совершенных оптических систем является глаз человека, состоящий из двух линз - роговицы и хрусталика, которые разделены слоем так называемой водянистой влаги (рис.5.64). Пространство изображений совпадает с сетчаткой глаза, на которой образуется действительное перевернутое изображение. Наивысшая острота зрения при дневном освещении достигается в области сетчатки, называемой центральной ямкой. В центральной ямке находится «желтое пятно», где концентрация цветовых рецепторов максимальна. Хрусталик является двояковыпуклой линзой (радиусы поверхностей в спокойном состоянии ~10 и 6 мм). Заднее фокусное расстояние в процессе работы изменяется ~ на 20%, варьируя, тем самым, и оптическую силу глаза. Это свойство глаза получило название аккомодации. Объемом (силой) аккомодации называют величину равную расстоянию между ближней и дальней точками ясного зрения. Он приблизительно соответствует 11 дп. (К 50 годам объем аккомодации уменьшается до 2,5 дп.).
Главными характеристиками оптической системы являются: масштаб изображения, светосила, поле зрения и разрешающая способность.
 Масштаб b есть отношение величины изображения к величине предмета: b= l’/l (рис.5.63). Для определения масштаба используются упрощенные зависимости. Так, если предмет расположен вдали, то b находится как отношение фокусного расстояния системы F к расстоянию до объекта, если же вблизи (как, например, в микроскопах) - то через линейное увеличение, т.е. отношением l’/l (рис.5.65).
Масштаб b есть отношение величины изображения к величине предмета: b= l’/l (рис.5.63). Для определения масштаба используются упрощенные зависимости. Так, если предмет расположен вдали, то b находится как отношение фокусного расстояния системы F к расстоянию до объекта, если же вблизи (как, например, в микроскопах) - то через линейное увеличение, т.е. отношением l’/l (рис.5.65).
Светосилой SF называется отношение освещенности Á’ изображения, создаваемой данной оптической системой к яркости предмета:
SF = Á’/ L.
 Обычно яркость предмета L принимают постоянной, тогда освещенность изображения Á’ (отношение светового потока, прошедшего через линзы к площади изображения) и будет являться параметром, определяющим светосилу оптической системы.
Обычно яркость предмета L принимают постоянной, тогда освещенность изображения Á’ (отношение светового потока, прошедшего через линзы к площади изображения) и будет являться параметром, определяющим светосилу оптической системы.
Яркость изображения L’ связана с яркостью предмета L соотношением:

где n, n’ - показатели преломления оптических сред, m - коэффициент пропускания света.
Полем зрения называется та часть пространства предметов, которая видна или изображается с помощью данной оптической системы. Поле зрения измеряется в угловой и линейной мерах (например, 60о - для проекционных объективов или 0,5 мм - для микроскопов). Величина поля зрения зависит от апертуры и ограничивается полевой диафрагмой.
Глаз имеет большой угол зрения ~ 1250 по вертикали и ~ 1500 - по горизонтали. Однако, область резкого зрения, ограниченная желтым пятном, не превышает 6 ... 80 (рис.5.64). Угол «качественного стереозрения» человека составляет ~ 60 ... 700.
Апертурой (от латинского «открытый») называется действующее отверстие оптической системы, определяемое размерами линз и диафрагмами (рис. 5.66). В расчетах чаще всего используется угловая апертура y, под которой понимают угол между крайним лучом первой линзы и ее оптической осью.
Разрешающая способность связана со свойством оптической системы, воспроизводить раздельно две точки. Она также может определяться в угловых yр и линейных K единицах. В первом случае справедлива приближенная формула Рэлея:
Здесь d - диаметр входного зрачка.
Разрешающая способность определяется с помощью тест-объектов, называемых мирами. Различают штриховые миры (миры Фуко) и радиальные.
Разрешающая способность глаза зависит от диаметра зрачка (1,5 ... 8 мм) и растет с увеличением последнего. Она максимальна при освещенности Á ~50 лк и длины волны излучения l равной 0,55 мкм. В среднем yр составляет 1’, однако, может достигать 10².
5.4.3. Элементы и схемы оптических локационных систем
 В настоящее время в системах навигации обычно используются оптронные ОЛС (для ближнего радиуса действия) и лазерные - для дальнего. Информативным параметром является величина сигнала, регистрируемого приемником ОЛС, зависящая, в том числе, и от яркости L объекта. Для системы, работающей в отраженном свете уровень принимаемого сигнала пропорционален отражающей поверхности объекта или его kотр. Следовательно, сигнал от объекта с большей отражающей способностью, будет выше и, например, белый объект будет казаться ближе черного.
В настоящее время в системах навигации обычно используются оптронные ОЛС (для ближнего радиуса действия) и лазерные - для дальнего. Информативным параметром является величина сигнала, регистрируемого приемником ОЛС, зависящая, в том числе, и от яркости L объекта. Для системы, работающей в отраженном свете уровень принимаемого сигнала пропорционален отражающей поверхности объекта или его kотр. Следовательно, сигнал от объекта с большей отражающей способностью, будет выше и, например, белый объект будет казаться ближе черного.
Датчики оптронных ОЛС строятся на основе твердотельных фотооптических преобразователей (например, оптронной пары типа светодиод - фотодетектор с открытым оптическим каналом), работающих, как правило, в ИК диапазоне. Качество обнаружения (детектирования) определяется следующими параметрами: мощностью и направленностью излучения, спектральной характеристикой первичных преобразователей (излучающего диода - на стороне излучателя и фотодетектора на стороне приемника) и свойствами отражающей поверхности объекта.
Излучатели и приемники ОЛС состоят из двух основных функциональных блоков: первичного преобразователя и оптической системы.
 Первичные преобразователи оптронных ОЛС строятся по тем же схемам, что и преобразователи оптических датчиков положения. Как правило, для излучения света применяются полупроводниковые светодиоды, использующие явление электролюминесценции. Их изготавливают на базе фосфида и арсенида галлия (обеспечивая, при этом КПД до 25%), карбида кремния. В оптических системах для приема светового сигнала чаще всего используются фототранзисторы, действие которых основано на внутреннем фотоэффекте или фотоумножители с малыми значениями темнового тока (~ 0,1 мкА) и постоянной времени (~10-2 мкс). Фототранзисторы обладают высокой чувствительностью и линейной функцией преобразования.
Первичные преобразователи оптронных ОЛС строятся по тем же схемам, что и преобразователи оптических датчиков положения. Как правило, для излучения света применяются полупроводниковые светодиоды, использующие явление электролюминесценции. Их изготавливают на базе фосфида и арсенида галлия (обеспечивая, при этом КПД до 25%), карбида кремния. В оптических системах для приема светового сигнала чаще всего используются фототранзисторы, действие которых основано на внутреннем фотоэффекте или фотоумножители с малыми значениями темнового тока (~ 0,1 мкА) и постоянной времени (~10-2 мкс). Фототранзисторы обладают высокой чувствительностью и линейной функцией преобразования.
Оптическая система, входящая в состав излучателей и приемников оптронных ОЛС предназначена для формирования направленного светового потока и получения изображения объекта. Она, как правило, строятся по схеме «объектив-конденсор».
Объективом обычно называется ближняя к объекту линза (или система линз), дающая его обратное действительное изображение. Появление объектива датируется 1840 г., когда венский оптик Й. Петцваль рассчитал первый прибор, который затем использовал для получения портретных изображений. (Его объектив был четырехлинзовым, линзы имели большие размеры и выполнялись из двух сортов стекла).
Современный объектив (рис. 5.68) характеризуется:
· фокусным расстоянием F (1 ... 10000 мм);
· углом поля зрения y’ (до 1700);
· светосилой SF или относительным отверстием r = d/F (r = 1:1 ... 1:30).
Кроме объектива в оптической системе может использоваться и окуляр - обычно ближняя к глазу линза (или несколько линз), образующая действительное изображение.
Объектив используется не только на передающей, но и на приемной стороне. Его важнейшая характеристика - фокусное расстояние характеризует величину поля зрения. Чем меньше F, тем больше зона обзора, но меньше разрешающая способность. Следовательно, для каждой конкретной задачи необходимо подбирать объектив с требуемым фокусным расстоянием. Объектив обычно содержит заслонку с отверстием, ограничивающую пучок лучей - диафрагму. (Диафрагмой глаза, например, изменяющей размер зрачка в пределах 1,5 … 8 мм, является его радужная оболочка). Диафрагма, проходящая через точку пересечения главного луча с оптической осью (в системе с одной линзой она является ее «оправой») называется апертурной. Ее изображением в пространстве предметов и изображений являются входной и выходной зрачок, соответственно. Характеристикой апертуры является угол поля зрения y’ (или угловое поле зрения) определяется размером диагонали кадра изображения и фокусным расстоянием объектива. Так, для обычных объективов y’ = 45 … 600 (рис. 5.68а), объективы с меньшим фокусным расстоянием называются широкоугольными (рис. 5.68в); для них характерно большее угловое поле (до 1700), и, наконец, телеобъективы или длиннофокусные объективы (рис. 5.68б) имеют угловое поле 5 … 300. В некоторых источниках, в основу разделения объективов по фокусному расстоянию положен параметр F* равный отношению фокусного расстояния к диагонали изображения. Объективы с F* < 0,9 называются короткофокусными, с F* > 1,5 - длиннофокусными. Таким образом, с помощью короткофокусных объективов можно увидеть большую зону, чем с помощью длиннофокусных, но с меньшими подробностями.
 Качество объектива определяется всеми компонентами, образующими его оптическую систему. Так, каждой из линз объектива свойственна аберрация - нелинейное искажение изображения, обусловленное отклонением свойств реальной линзы от идеальной. Частичная компенсация аберраций достигается в объективах с несколькими линзами (например, склеенными или выполненными из разных материалов), а также применением зеркальных систем, как в фотообъективах. Однако, при малых значениях относительного отверстия и угла поля зрения (r < 1:12 и y’ = 1 … 3о) аберрации практически отсутствуют. Такие объективы используются в качестве тестовых.
Качество объектива определяется всеми компонентами, образующими его оптическую систему. Так, каждой из линз объектива свойственна аберрация - нелинейное искажение изображения, обусловленное отклонением свойств реальной линзы от идеальной. Частичная компенсация аберраций достигается в объективах с несколькими линзами (например, склеенными или выполненными из разных материалов), а также применением зеркальных систем, как в фотообъективах. Однако, при малых значениях относительного отверстия и угла поля зрения (r < 1:12 и y’ = 1 … 3о) аберрации практически отсутствуют. Такие объективы используются в качестве тестовых.
Применительно к объективам светосила определяется выражением: SF = r2m. Иногда ее вычисляют через относительное отверстие r, величину равную отношению диаметра отверстия диафрагмы d к фокусному расстоянию F. (Например, если диаметра действующего отверстия диафрагмы объектива 25 мм, а его фокусное расстояние 50 мм, то говорят, что его светосила составляет 1:2). Для увеличения светосилы в большинстве современных объективов с автодиафрагмой используются специальные фильтры с «центральным пятном». Относительное отверстие определяет и разрешающую способность объектива. Для нахождения линейной разрешающей способности K существует эмпирическая зависимость:
K = 1473/N. Размерность K - линий/мм.
При описании объективов наряду со светосилой SF, используется понятие диафрагменного (апертурного) числа N или эффективного диафрагменного числа kэ, равных, соответственно:
N = 1/r = F/d,
kэ = N/Ö2 .
Значения kэ обычно стандартизуют рядом предпочтительных значений - 1:0,7; 1:1; 1:1,4; 1:2; ... 1:5,6; 1:8; 1:11; 1:16 ... 1:64.
Оптическая (преломляющая) сила линз D зависит от радиуса кривизны R границы раздела двух сред и их коэффициентов преломления n1 и n3 (рис. 5.69):
D = - n1/f = n3/f’.
Для линзы, находящейся в воздухе (n1 = n3 » 1) справедливо выражение:
D = 1/F,
где D измеряется в диоптриях (дп). Для собирающих линз D > 0, для рассеивающих D < 0. Чем больше оптическая сила, тем ближе к линзе располагается изображение и тем меньше величина этого изображения.
Для вычисления преломляющей силы оптической системы с несколькими линзами Dn используется формула Гульстранда, учитывающая количество преломляющих поверхностей. Так, если оптическая система состоит из нетонких линз, т.е. каждая из них представляет собой систему с двумя преломляющими поверхностями, то для каждой из линз справедливо:
Здесь Dп и Dз - преломляющие силы передней и задней поверхностей линзы соответственно, d’ - расстояние между ними, n - коэффициент преломления заключенной между ними среды.
В качестве примера рассмотрим глаз человека, представляющий собой оптическую систему с двумя линзами или четырьмя преломляющими поверхностями. Оптическая сила глаза Dг составляет » 59 дп. При его напряжении происходит изменение фокусных расстояний хрусталика, и оптическая сила возрастает до 70 дп. Нормальный глаз называется эмметропическим. В этом случае плоскость изображений находится на сетчатке. Близорукость (миопия) возникает, когда задний фокус глаза оказывается перед сетчаткой, дальнозоркость (гиперметропия) - если за ней. Для нормализации близорукого глаза необходимо уменьшить его оптическую силу, для чего к глазу приставляют отрицательную линзу, оптическая сила которой приводит задний фокус на сетчатку. Глаз без хрусталика (афакический) требует для восстановления оптической силы компенсационной очковой линзы силой ~ 11 ... 14 дп. Глаз, как линзовая система, имеет и другие дефекты. Так, например, различие оптической силы глаза в разных направлениях приводит к астигматизму, который проявляется в том, что изображение двух взаимно перпендикулярных прямых не получаются одинаково резкими.
Важной характеристикой объектива является глубина резкости ТL, выражаемая через расстояние вдоль оптической оси между точками пространства изображений, определяющими границы резкого изображения. Для качественных объективов (с высокой разрешающей способностью и аберрацией ниже 0,015 мм) справедливо эмпирическое выражение:

Например, для относительных отверстий r = 1:2 ... 1:4 глубина резкости составляет ~ 0,05 ... 0,1 мм.
В табл. 5.14 представлены некоторые технические характеристики объективов.
Таблица 5.14. Примеры отечественных промышленных объективов
| Модель | Тип | F, мм | r | Угловое поле y’, 0 | К, линий/мм | Размеры, мм |
| Мир-1В | Широкоугольный | 27 ... 37 | 3,5 ... 2,8 | 57 … 70 | 23 ... 55 | Æ112´103 |
| Гелиос | Нормальный | 50 | 2,0 | 44 | Æ52´60 | |
| Таир | Теле | 135 ... 1000 | 2,8 ... 8,0 | 17 ... 23 | 28 ... 52 | |
| ОКС | Кино | 10 ... 150 | 2,0 ... 2,8 | 64 ... 100 | 35 ... 65 | Æ22´27 |
| Вариогоир | Трансфокатор | 11,8 ... 120,0 | 1,7 ... 2,5 | 10 … 72 | Æ110´235 |
Примечание. KF - кратность изменения фокусного расстояния.
 Конденсор предназначен для увеличения освещенности в плоскости изображения. Он создает действительное изображение источника света на конечном расстоянии от него. (Частным случаем конденсора является коллиматор, формирующий параллельный световой пучок). В приемнике он устанавливается после объектива, в передатчике перед ним, но во всех случаях - ближе к плоскости изображений. Конструкция конденсора зависит от апертуры. Простейший конденсор представляет собой плосковыпуклую линзу, сферическая поверхность которой направлена в сторону далеко удаленного источника света (или его изображения). Более сложные схемы включают 1 … 2 линзы (при малых значениях апертуры) и не менее трех линз, при апертуре большей 300 (рис. 5.70).
Конденсор предназначен для увеличения освещенности в плоскости изображения. Он создает действительное изображение источника света на конечном расстоянии от него. (Частным случаем конденсора является коллиматор, формирующий параллельный световой пучок). В приемнике он устанавливается после объектива, в передатчике перед ним, но во всех случаях - ближе к плоскости изображений. Конструкция конденсора зависит от апертуры. Простейший конденсор представляет собой плосковыпуклую линзу, сферическая поверхность которой направлена в сторону далеко удаленного источника света (или его изображения). Более сложные схемы включают 1 … 2 линзы (при малых значениях апертуры) и не менее трех линз, при апертуре большей 300 (рис. 5.70).
Используемые в современной фотографии оптические системы, состоящие из нескольких линз, получили название «объектив-анастигмат». В частности, известная модель Индустар содержит 4 линзы, две из которых простые, а две склеенные. Такая схема хорошо исправляет аберрации. Промышленно выпускаются объективы с фокусными расстояниями F = 50 ... 1200 мм и относительными отверстиями r = 1:9 ... 1:2,8. Широкое распространение получили оптические системы с переменным фокусным расстоянием - трансфокаторы. Так, известная схема ZOOM, позволяющая изменять фокусное расстояние в десятки раз, содержит от 6 до 10 и более линз.
В робототехнике при расчете ОЛС обычно пытаются удовлетворить трем основным условиям. Первое - это выбор необходимой области зрения, второе - определение разрешающей способности и третье - нахождение способа компенсации изменение освещенности. Первые два требования удовлетворяются при надлежащем выборе угла обзора, который может составлять от нескольких градусов - для концентрации внимания на удаленном объекте, до 1800 - для обзора большой территории. Зная угол обзора можно найти фокусное расстояние оптической системы, причем, чем меньше F, тем больше угол обзора. В этом смысле целесообразно использовать широкоугольные объективы. (Здесь, правда, надо иметь в виду, что объективы с углом зрения больше 1200 вносят существенные искажения).
Проще всего выбрать оптическую систему, если заранее известна дальность обнаружения или габариты и удаление хо объекта наблюдения. Тогда:
F = lв’хо/ lв и F = lг’хо/ lг,
где lв, lг - вертикальный и горизонтальный размеры объекта, lв’, lг’ - вертикальный и горизонтальный размеры изображения на фотоприемнике.
В устройствах теленаблюдения, например, в зависимости от угла обзора, используют оптические системы с F от 2,8 мм (широкоугольные) до 12 мм и более (узконаправленные). Примеры характеристик некоторых объективов, применяемых в устройствах видеонаблюдения приведены в табл. 5.15.
Таблица 5.15. Микрообъективы
| Модель | Тип | F, мм | r | Угловое поле y’,0 | К, линий/мм | Æ, мм | m, г |
| Т/3,5-8 | Нормальный | 3,5 | 1 ... 1,4 | 8 | 40 | ||
| Hyosung | Телеобъектив | 12 | 8 | 30 | |||
| SL-2 | Pin-hole | 9 | 35 ... 28 | 70 | 12 | 50 | |
| SL-15 | Pin-hole | 2,4 | 115 ... 90 | 65 | 12 | 50 | |
| Y1235M | Широкоугольный | 2,5 | 1,4 | 95 | 12 | 30 |
Примечание. Модель Hyosung разработана фирмой Hyosung, Корея, Т/3,5-8 и SL - фирмами Терна и Фокус, Россия, Y1235M - фирмой Yamano, Япония.
Оптронные ОЛС чаще всего используются в системах безопасности релейного типа. Различают: дискретную и матричную схемы оптронных датчиков.
 Классическая схема дискретного датчика содержит первичный оптронный преобразователь в виде свето- и фотодиода, объединенных в едином корпусе. Коллимационные линзы, образующие конденсор, сфокусированы в одну точку (рис. 5.71). Световой сигнал модулируется частотой 15 … 30 кГц, обеспечивая среднюю мощность излучения ~ 0,05 Вт. При работе датчика в отраженном свете его дальность х, достигает 0,7 … 1,0 м, быстродействие ~ 0,3 мс. Диапазон срабатывания датчика Dх настраивается фокусировкой оптической системы. Недостатком схемы является невысокая дальность действия и чувствительность к помехам и отражающим характеристикам препятствия. Для повышения помехоустойчивости в условиях световых засветок используются оптические фильтры, оставляющие в оптическом диапазоне только ИК область, а также ИМ переменной частоты с синхронным детектированием.
Классическая схема дискретного датчика содержит первичный оптронный преобразователь в виде свето- и фотодиода, объединенных в едином корпусе. Коллимационные линзы, образующие конденсор, сфокусированы в одну точку (рис. 5.71). Световой сигнал модулируется частотой 15 … 30 кГц, обеспечивая среднюю мощность излучения ~ 0,05 Вт. При работе датчика в отраженном свете его дальность х, достигает 0,7 … 1,0 м, быстродействие ~ 0,3 мс. Диапазон срабатывания датчика Dх настраивается фокусировкой оптической системы. Недостатком схемы является невысокая дальность действия и чувствительность к помехам и отражающим характеристикам препятствия. Для повышения помехоустойчивости в условиях световых засветок используются оптические фильтры, оставляющие в оптическом диапазоне только ИК область, а также ИМ переменной частоты с синхронным детектированием.
Большей дальностью обладают датчики, работающие в проходящем свете и включающие оптическую систему «объектив-конденсор» и узкополосный ИК оптический фильтр на стороне приемника. Их дальность достигает 20 м.
В робототехнике оптронные ОЛС используются очень широко не только в дискретном, но и непрерывном режимах, обеспечивая при этом достаточно высокую точность измерений. Например, погрешность ОЛС фирмы Dolan-Jenner (США) составляет ± 0,025 мм, фирм Keyence (Япония) и Balluff (Германия) ± 5 мкм при измерении расстояний в диапазоне ± 1мм. Быстродействие систем достигает ~ 2 мс. Функция преобразования ОЛС - нелинейна, поэтому ее датчики обычно калибруются на некоторую эффективную дальность, относительно которой и регламентируются все ее метрологические характеристики. Для расширения температурного диапазона работы (до 250 0С) современные модификации оптронных датчиков малых расстояний используют световолоконные каналы передачи данных.
 Дискретные бинарные датчики применяются не только в ОЛС, но и в оптических системах идентификации - Smart-картах. Простая схема оптического считывателя приведена на рис. 5.72.
Дискретные бинарные датчики применяются не только в ОЛС, но и в оптических системах идентификации - Smart-картах. Простая схема оптического считывателя приведена на рис. 5.72.
Матричная схема оптронных датчиков предназначена для обнаружения предметов, имеющих рассеяно отражающие свойства, и предполагает применение массива фотодетекторов в виде полупроводниковой матрицы или линейки. Такие схемы используются также в задачах наведения, когда несколько дифференциально включенных детекторов устанавливаются, например, на пальцах захватного устройства робота (рис. 5.73). В этом случае, сигнал позиционирования DU формируется в виде разности сигналов детекторов с противоположных пальцев: U1-U2. Для получения функции преобразования в виде DU = f(x), характеристику нормализуют: D = (U1-U2)/(U1+U2). Данная ОЛС, содержащая две пары детекторов была разработана в Токийском технологическом институте для транспортного робота. Система позволяет определять не только расстояние до объекта х, но и его координаты.
Выпускаемые промышленно оптронные дальномеры измеряют расстояния до 100 мм с погрешностью ~1%, причем время измерения не превышает 4 мс. Для увеличения радиуса действия до 10 м используются оптические отражатели.
5.4.4. Лазерные оптические локационные системы
Самым мощным и точным средством дистанционного обнаружения и распознавания объектов является ОЛС на базе оптического квантового генератора - лазера. Он позволяет получать бесконтактную информацию на расстояниях свыше 100 м.
ХХ век недаром иногда называют лазерным веком. Лазер сейчас является одним из самых распространенных приборов, да и совершенствование схем идет полным ходом. Впервые же идея усиления электромагнитных волн за счет вынужденного излучения или инициирования самовозбуждающихся колебаний была предложена В.А. Фабрикантом и Д. Вебером в 1951 г, а реализована в 1954 году. Изготовленный Д. Гордоном, Х. Цайгером и Ч. Таунсом прибор, работавший в диапазоне сантиметровых волн, получил название мазер (от англ - Microwave Amplification by Stumulated Emission of Radiation). В качестве активной среды использовался аммиак. Идея о переводе излучения в видимый диапазон, предложенная в 1959 г. А. Джаваном, Н.Г. Басовым и др., привела к появлению первых лазеров (Light Amplification …) - сначала твердотельного рубинового (в 1960 г. Т. Мейманом), а затем газового He-Ne (в 1961 А. Джаваном, В. Беннетом и Д. Эрриотом). За работы в этой области несколько человек были удостоены Нобелевской премии - в том числе советские физики Н. Басов и А. Прохоров.
 В основе работы лазера лежит свойство системы возбужденных атомов или молекул под действием внешнего электромагнитного излучения соответствующей частоты совершать вынужденные квантовые переходы и усиливать это излучение. Система возбужденных атомов (активная среда) способна усиливать падающее излучение, если она находится в состоянии с «инверсией заселенностей» . В этом состоянии число атомов на возбужденном энергетическом уровне превышает число атомов на нижерасположенном уровне.
В основе работы лазера лежит свойство системы возбужденных атомов или молекул под действием внешнего электромагнитного излучения соответствующей частоты совершать вынужденные квантовые переходы и усиливать это излучение. Система возбужденных атомов (активная среда) способна усиливать падающее излучение, если она находится в состоянии с «инверсией заселенностей» . В этом состоянии число атомов на возбужденном энергетическом уровне превышает число атомов на нижерасположенном уровне.
Рассмотрим этот вопрос подробнее. Во всех традиционных источниках света используется спонтанное излучение системы возбужденных атомов, складывающееся из случайных процессов излучения множества атомов. При вынужденном излучении все атомы когерентно излучают кванты света, тождественные по частоте, направлению распространения и поляризации квантам внешнего поля. Каждая атомная антенна образует диполь.
Для создания «инверсии заселенностей» используются разные методы. Так, в рубиновом лазере она осуществляется посредством оптической накачки по трехуровневой схеме (рис. 5.74). При возбуждении атомы переходят из основного состояния с энергией Е1 в состояние Е3. Через короткий промежуток времени ~ 10-8 с они безизлучательно переходят в метастабильное состояние Е2. Время жизни в этом состоянии существенно выше и составляет ~ 10-3 с. При достаточно быстром переводе атомов из Е1 в Е3 плотность частиц на уровне Е2 окажется выше, чем на Е1 и возникнет «инверсия заселенностей» уровней Е2 и Е1. Лазерная генерация осуществляется при возвращении атомов на основной уровень с энергией Е1.
В активной среде лазера, помещенной в оптический резонатор, например, в виде двух плоских параллельных зеркал, накачка создается оптическим генератором (лампой-вспышкой или другим источником). Благодаря усилению при многократных проходах частиц между зеркалами формируется мощный когерентный поток электромагнитного излучения оптического диапазона, направленный перпендикулярно плоскости зеркал. Излучение выводится наружу путем открытия одного из зеркал.
Простейший лазерный излучатель состоит из следующих частей (рис. 5.75): активного элемента (в котором формируется лазерный луч), резонатора (в виде системы зеркал) и системы возбуждения (накачки).
Рассмотрим основные типы лазеров. Излучатели лазерных ОЛС можно классифицировать по четырем основным признакам.
1. По типу активной среды. Различают: газовые, жидкостные, твердотельные и полупроводниковые приборы. Первые, к которым относятся гелий неоновые (He-Ne), ИК на основе CO2-N2 и др, обладают наивысшим КПД h и мощностью непрерывного излучения Рн среди всех лазеров. Так, например, для лазера на основе CO2-N2 с l = 10,6 мкм, h ~30% и Рн достигает ~ 2 104 Вт. Жидкостные (на органических красителях) в робототехнике не применяются. Твердотельные, использующие в качестве активной среды оптические монокристаллы и стекла, обладают наивысшей пиковой мощностью излучения Рп. В частности, мощность излучения рубинового лазера с длиной волны l = 0,6943 мкм достигает  1ГВт в импульсе 30 нс. Что касается полупроводниковых, самых миниатюрных и маломощных из всех лазеров, то именно они в последние годы получили наибольшее применение в задачах робототехники и мехатронике. Большинство схем строятся на базе арсенида галлия (Ga-Al-As).
1ГВт в импульсе 30 нс. Что касается полупроводниковых, самых миниатюрных и маломощных из всех лазеров, то именно они в последние годы получили наибольшее применение в задачах робототехники и мехатронике. Большинство схем строятся на базе арсенида галлия (Ga-Al-As).
2. По режиму излучения: непрерывные, однократные и импульсные.
3. По диаграмме направленности: лучевые (Не-Ne, рубиновые и др. с расходимостью менее 0,010) и секторные (полупроводниковые с расходимостью ~ 1 ... 400).
4. По мощности излучения: малой и средней мощности и пиковые. В задачах локации обычно применяются лазеры малой и средней мощности (полупроводниковые и жидкостные с мощностью излучения 0,1 мВт … 500 Вт). Мощные и пиковые лазеры используются в специальных задачах. Так, например, рубиновый спектроскоп в импульсе длительностью ~100 пс развивает мощность до 2 ГВт.
В целом, в зависимости от типа лазера длина волны излучения l лежит в интервале 0,1 мкм … 0, 8 мм, мощность Рн - 1 мкВт … 1 МВт, энергия в импульсе - 0,1 … 106 Дж.
В последнее время получены очень высокие энергетические характеристики лазерных установок. Так, достигнута интенсивность излучения (плотность мощности) ~ 1020 ... 1021 Вт/см2. При такой интенсивности напряженность электрического поля Е достигает ~ 1012 В/см, что на два порядка сильнее поля протона. Однако длительность таких излучений очень мала и не превышает величин 10-15 с (фемтосекунды). Указанные обстоятельства позволили разрабатывать лазеры, излучающие в рентгеновском (разеры) и g диапазонах (гразеры). Длительность импульсов при этом составляет аттосекунды (10-18 с.)
Наиболее распространенным применением лазеров в локации являются дальномеры. Промышленно выпускаются твердотельные импульсные лазерные дальномеры на основе аллюмоиттриевого граната с неодимом. Принцип действия прибора основан на измерении временного интервала t между приемным и опорным импульсами (рис. 5.76). Длительность импульсов варьируется от 10-15 до 10-3 с, энергия излучения от 0,01 до 1 Дж. Эти системы, предназначенные для измерения расстояний 1 ... 30 км, используются преимущественно в военном деле. Наряду с твердотельными, все чаще применяют газовые ИК лазеры на основе Ar, He-Ne и CO2. Коме высокого КПД они обладают малой чувствительностью к фоновым излучениям и меньшим затуханием сигнала в воздушной среде.

Импульсные лазерные дальномеры также нашли широкое применение в задачах геодезии и космической навигации. Еще в 60-х годах ХХ века для проекта «Apollo » был разработан лазерный дальномер на рубиновой основе, излучающий импульсы длительностью ~ 10 нс и энергией около 0,2 Дж. Дальномер обладал очень острой диаграммой направленности - расходимость луча не превышала 0,3 мрад. (При высоте орбиты космического аппарата ~ 100 км диаметр пятна составлял 25 м). Использование этого прибора совместно с лазерным отражателем позволило измерить расстояние от Земли до Луны. Погрешность измерения (эксперимент проводился с участием астронавтов космического корабля «Apollo-11») составила 0,15 м. Твердотельный лазерный высотомер применялся на орбитальном космическом аппарате Mars Observer, орбита которого имела средний радиус около 400 км. Дальномеры системы MOBLAS используют импульсы длительностью ~ 0,1 нс с пиковой мощностью до 1 ГВт с частотой повторения до 10 Гц.
 При работе лазерного импульсного дальномера большая часть энергии излучения посылается в среду в виде короткого импульса, а небольшая часть непосредственно подводится к приемнику, создавая опорный (маркерный) импульс. Этот импульс запускает измеритель временного интервала. Через некоторое время t = 2D/с (где D - дальность, с - скорость), отраженный импульс достигает приемника, и после усиления и фильтрации останавливает счетчик измерителя временного интервала. В современных лазерных дальномерах величина относительной погрешности достигает ~ 1 10-8 %.
При работе лазерного импульсного дальномера большая часть энергии излучения посылается в среду в виде короткого импульса, а небольшая часть непосредственно подводится к приемнику, создавая опорный (маркерный) импульс. Этот импульс запускает измеритель временного интервала. Через некоторое время t = 2D/с (где D - дальность, с - скорость), отраженный импульс достигает приемника, и после усиления и фильтрации останавливает счетчик измерителя временного интервала. В современных лазерных дальномерах величина относительной погрешности достигает ~ 1 10-8 %.
Лазерные системы нашли широкое применение и в других задачах. В частности, высокая частота и монохроматичность излучения позволили создавать высокоточные системы наведения и позиционирования. Лазерная головка наведения является важной частью высокоточных систем наведения, используемых как в специальных задачах (наведение ракет, бомб и пр.), так и в промышленности. Характерным примером является система управления движением лазерного считывателя компакт дисков (рис. 5.77).
В большинстве конструкций головка содержит лазерный диод мощностью 2 ... 10 мВт, оптическую схему для фокусировки и управления положением фокального пятна, а также фотоприемники.
 Малое по размеру фокальное пятно используется для обеспечения перемещения головки по дорожке диска, а также для точного поддержания заданного расстояния между диском и фокусирующей линзой. Это обеспечивается системой автофокусировки, которая позволяет отслеживать осевые биения диска в пределах допускаемых ± 0,5 мм (рис. 5.78).
Малое по размеру фокальное пятно используется для обеспечения перемещения головки по дорожке диска, а также для точного поддержания заданного расстояния между диском и фокусирующей линзой. Это обеспечивается системой автофокусировки, которая позволяет отслеживать осевые биения диска в пределах допускаемых ± 0,5 мм (рис. 5.78).
Глубина резкости лазерной головки ТL определяется зависимостью:

где NA - числовая апертура фокусирующего объектива - безразмерная величина, в данной системе она меньше 1. Тогда, например, для лазера с l = 0,635 мкм и NA = 0,6, получим ТL = 0,88 мкм. Следовательно, «степень расфокусировки» при такой глубине резкости и допустимом изгибе диска 0,5 мм составит около 600.
Оптическая схема головки наведения работает следующим образом (рис. 5.77). Свет лазера проходит через коллиматор, линейно поляризуется призмой (расщепителем), далее - сквозь четвертьволновую пластинку и отражается от диска. При отражении и прохождении через четвертьволновую пластинку обратно характер распространения световых волн изменится - на расщепитель попадет свет с перпендикулярной поляризацией по отношению к исходной. Этот свет уже не пройдет сквозь призму и отражается ею на светоприемники.
Автофокусировка осуществляется методом Фуко (подобные схемы применяются также в системах автоматического наведения на резкость в телекамерах). Схема содержит линейку из четырех фотодиодов. Суммирование сигналов производится схемой, представленной на рис. 5.78г. Начальной настройкой устройства на фотодиодах формируются световые пятна, причем так, чтобы они устанавливались на границе между 1 и 2, 3 и 4 фотодиодами (рис. 5.78а). Если диск приближается к объективу (рис. 5.77б), то фокальная плоскость смещается за ребро призмы, и световые пятна возникают только на 1 и 4 приемниках, а разностный сигнал (рис. 5.78г) становится отрицательным. При удалении диска световые пятна возникают только на 2 и 3 фотодиодах (рис. 5.78в), и выходной сигнал - положительным.
Разрешающая способность оптической системы определяется диаметром фокального пятна dф: dф = l/2NA. Из этой зависимости следует, что для увеличения разрешающей способности следует уменьшать длину волны и увеличивать числовую апертуру. Большинство лазерных диодов излучают ИК свет с длиной волны 0,78 мкм. Для уменьшения длины волны (и, следовательно, размера фокального пятна) увеличивают содержание алюминия, при этом получают диоды с длиной волны 0,63 мкм. В конце ХХ века были внедрены относительно коротковолновые «зеленые» и «голубые» лазеры. (Одним из основоположников этих разработок был Нобелевский лауреат 2000 г. русский физик Ж. Алферов). Что касается апертуры, то большой апертурой обладают короткофокусные объективы. Однако, надежность таких схем ниже, и поэтому в ОС выбирают компромиссное значение NA = 0,6.
К лазерным ОЛС специального назначения относятся лазерные микрофоны, принятые на вооружение американскими спецслужбами еще в 60-х годах ХХ века. С появлением полупроводниковых лазеров эти устройства стали применяться и частными службами. Лазерные микрофоны регистрируют модулированные колебания вибрирующих стекол. В частности, известно, что прибор TRM-1830 с дальностью действия 150 м днем и 400 м ночью и габаритами 26´22´20мм использовался во время Уотергейта, приведшего к импичменту американского президента Р. Никсона. Примеры других микрофонов представлены в табл. 5.16.
Таблица 5.16. Примеры лазерных микрофонов
| Модель | Излучатель | Дальность, м | Цена, $ |
| ЛСТ-ЛА2 | диод | 100 | 700 |
| HP-150 | He-Ne, диод | 1000 | 5000 |
Примечание. Модель HP-150 разработана фирмой Hewlett Packard, США
В завершении данного раздела подведем некоторые итоги. Основные достоинствами оптронных и лазерных ОЛС являются: малая постоянная времени (t до 50 нс), широкий диапазон и высокая точность измерений, возможность измерения геометрических характеристик движущихся объектов, а также скоростей, высокая надежность и прочность. В то же время эти системы не лишены недостатков. Наиболее существенными из них являются: низкая помехозащищенность и чувствительность к отражающим свойствам объектов и температурная зависимость светового потока. Для оптронных ОЛС также характерна малая оптическая мощность.
В табл. 5.17 представлены некоторые характеристики ОЛС.
Таблица 5.17. Примеры промышленных ОЛС
| Модель | Тип | Дальность, м | t, мс | e, % | Размеры, мм | m, г |
| РФ8422 | Видимого света | 6 | 1 | 1 | 53´112 | 200 |
| ДОБЦ-15 | ИК | 0,05 ... 8 | 2 | Æ8´28 (75´38´15) | 280 | |
| LS05- LS30 | ИК | 1 | 1 | Æ8´20 | 100 | |
| NX50/70 | Лучевой | 10 (5*, 0,7**) | 3 | 0,1 | 150 | |
| MH-10 | Охранный, ИК | до 40 | 80´60´43 | 400 | ||
| SX-23 | Волоконный | 0,3 | 0,1 | 0,03 | 15´10´25 | 30 |
| NRT-390 | ИК лазер | 500 | 0,01 | Æ 2,5´8 | ||
| Гранат | ИК (He-Ne) лазер | 20000 | 10-4 | 330´330´410 | 15000 |
Примечание.
1. Локаторы LS05, LS30 - произведены фирмой Leuze electronic, Германия), датчики NX и NRT - фирмой Sunks, Япония, система MH-10 - фирмой Crow, Израиль.
2. * - поверхность с зеркальным отражением, ** - прозрачная поверхность.
Вопросы для самостоятельной подготовки
1. Какими параметрами описывается волновое уравнение?
2. Какой тип модуляции колебаний имеет самый узкий спектр?
3. Можно ли использовать вихретоковый датчик для контроля неферромагнитных материалов и диэлектриков?
4. Какой локационный прибор обладает большей разрешающей способностью - ультразуковой локатор или электромагнитный радар?
Грунтовые и межпластовые безнапорные воды - лекция, которая пользуется популярностью у тех, кто читал эту лекцию.
5. Какое колебание имеет линейчатый спектр?
6. От каких параметров зависит расхождение и затухание ультразвуковой волны?
7. В каких единицах измеряются яркость и освещенность?
8. Для чего используется конденсор?
9. Какой тип лазерного излучателя обладает наибольшей мощностью?
10. Что такое диафрагма и для чего она применяется?
Рекомендуемые лекции
- Грунтовые и межпластовые безнапорные воды
- Задачи принятия решений в условиях риска и неопределенности
- 2. Требование к СУД и проблемы
- 26 Законные представители физического или юридического лица, свидетель, понятой, эксперт, переводчик
- 37 Условия возникновения права пережившего супруга на наследование по закону


















