
Цифровой следящий электропривод с прямым микропроцессорным управлением
Цифровой следящий электропривод с прямым микропроцессорным управлением
12.1 Конструкция цифрового электропривода.
Конструктивно рабочий макет системы микропроцессорного управления цифровым электроприводом постоянного тока (ЦППТ) выполнен в виде научно-исследовательского стенда . Эскиз стенда "Цифровой электропривод" представлен на рис.12.1. Основу конструкции стенда составляет стандартный лабораторный стол 1. Вертикально на столе монтируется панель с гнездами для измерений необходимых параметров различных блоков системы управления электроприводом. На этой панели закрепляется фальш-панель 2 с выполненной на ней мнемонической блок-схемой привода ЦППТ, вид которой представлен на рис.12.2, совместно с управляющей микро-ЭВМ. Здесь же, в соответствующих местах выведена индикация угла поворота и частоты вращения вала привода посредством светодиодов и семисегментных элементов.
Электродвигатель постоянного тока 3 с нагрузочным устройство 4 и импульсным датчиком 5 укреплены на. специальном вертикальном (для экономии места) каркасе-стойке, установленной на полу справа от лабораторного стола 1.
Микропроцессорный комплекс 6, или микро-ЭВМ с блоком программатора 7 и источником питания нагрузочного устройства 8 расположены на крышке приборной тумбы 9, которая установлена слева от стойки с двигателем.
В тумбе 9 установлен крейт 10 с электронными блоками системы управления. В крейте расположена также необходимая функциональная коммутационная аппаратура. Такое расположение и конструктивное исполнение блока 10 дает возможность свободного доступа к печатным платам электронных блоков в случаях их изучения или ремонта.
Предложенное расположение оборудования, соответствующее функциональной блок-схеме (рис.12.2) системы ЦППТ, обеспечивает эффективную и безопасную работу за стендом.
Рекомендуемые материалы
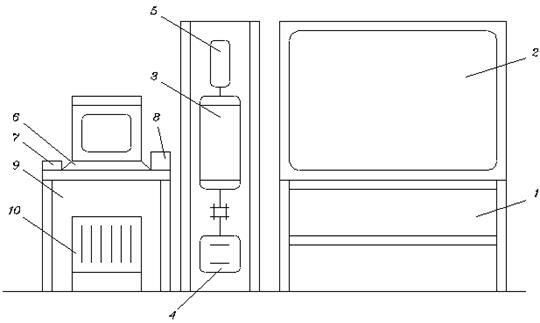
Рис. 12.1. Стенд «Цифровой электропривод»
12.2 Функциональная структура цифрового электропривода.
Электропривод с электродвигателем постоянного тока представляет собой двухконтурную цифровую следящую систему автоматического регулирования. Контуры отрицательной обратной связи замыкаются через микро-ЭВМ с помощью импульсного датчика, с которого можно получить информацию о частоте вращения и угле поворота вала электродвигателя.
Функциональная схема ЦППТ изображена на рис. 12.2 и состоит из микро-ЭВМ, программатора, интерфейса, преобразователя код-фаза, распределителя импульсов, блока тиристоров, электродвигателя постоянного тока, тахогенератора, импульсного датчика, блока угол-код с цифровой индикацией об угле поворота и о частоте вращения вала электродвигателя. Для исследования и измерения механических характеристик в стенде предусмотрено нагрузочное устройство.
Рис.12.2
 Укрупненный алгоритм функционирования ЦППТ можно представить следующим образом. ЦППТ с электродвигателем постоянного тока выполнен по принципу неавтономной цифровой автоматизированной системы управления, в которой сравнение задающего и отрабатываемого кодов происходит непосредственно в самой микро-ЭВМ.
Укрупненный алгоритм функционирования ЦППТ можно представить следующим образом. ЦППТ с электродвигателем постоянного тока выполнен по принципу неавтономной цифровой автоматизированной системы управления, в которой сравнение задающего и отрабатываемого кодов происходит непосредственно в самой микро-ЭВМ.
Управляющий сигнал из микро-ЭВМ выдается на преобразователь код-фаза и обрабатывается в распределителе импульсов. Далее через тиристорный преобразователь подается на исполнительный электродвигатель постоянного тока. Ошибка рассогласования между задающим устройством и обратной связью отрабатывается в цифровом корректирующем устройстве микро-ЭВМ.
Описание работы отдельных блоков ЦППТ.
Микро-ЭВМ
Упрощенная блок-схема микро-ЭВМ ДВК-3 представлена на рис.12.3.
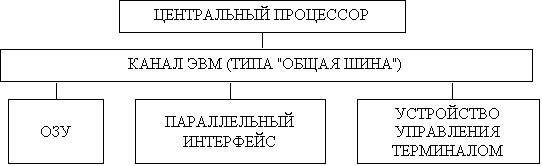
Рис.12. 3. Блок-схема микро-ЭВМ.
Микро-ЭВМ имеет модульный принцип построения, т.е. все функциональные блоки выполнены в виде конструктивно законченных устройств (модулей), связь между которыми осуществляется через единый канал обмена информацией. Таким образом, микро-ЭВМ представляет собой систему модулей, объединенных каналом.
Канал обмена типа "ОБЩАЯ ШИНА" является простой, быстродействующей системой связей, соединяющей центральный процессор, память и все внешние устройства. Все модули, подключенные к каналу микро-ЭВМ, используют одни и те же канальные связи.
Связь через канал замкнута, т.е. на управляющий сигнал, подаваемый активным устройством, должен поступить сигнал от пассивного устройства.
Основным элементом микро-ЭВМ является центральный процессор, который управляет распределением времени использования канала внешними устройствами и выполняет все необходимые арифметико-логические операции для обработки информации. Он содержит 8 быстродействующих регистров общего назначения (РОН) , которые широко используются при выполнении различных операций. Центральный процессор выполняет одноадресные, двухадресные команды, команды расширенной арифметики, может обрабатывать как шестнадцатиразрядные, так и 8-разрядные слова. Возможность
использования восьми методов адресации позволяет вести высокоэффективную обработку данных, хранимых в любой ячейке памяти или в регистре. Центральный процессор выполнен на базе микропроцессора КМ1801 ВМ2, который изображен на рис. 12.4.
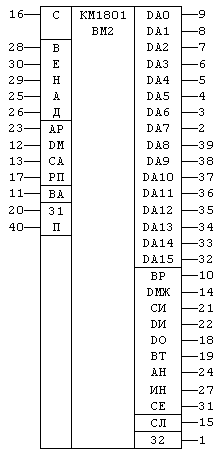
Рис.12. 4. Схема микропроцессора КМ 1801 ВМ2.
КМ1801 ВМ2 – однокристальный 16-разрядный микропроцессор, состоящий из операционного блока, блока микропрограммного управления, блока прерываний, интерфейсного блока, блока системной магистрали и схемы тактирования.
Операционный блок выполняет операции формирования адресов команд и операндов, логические и арифметические, хранения операндов и результатов.
Блок микропрограммного, управления, вырабатывает последовательность микрокоманд на основе кода принятой команды В нем закодирован полный набор микрокоманд для всех типов команд.
Блок прерываний организует приоритетную систему прерываний. Выполняет прием и предварительную обработку внешних и внутренних запросов на прерывание вычислительного процесса.
Интерфейсный блок, выполняет обмен информацией между устройствами, расположенными на системной магистрали. Осуществляет арбитраж при операциях прямого доступа к памяти. В интерфейсном
блоке формируется последовательность управляющих сигналов системной магистрали.
Блок системной магистрали связывает внутреннюю магистраль с внешней. В нем производится управление усилителями приема и выдачи информации на совмещенные выводы адресов и данных.
Схема тактирования обеспечивает синхронизацию внутренних блоков.
Сигналы ДА0-ДА15 определяют адреса и данные, которые передаются по совмещенной системной магистрали.
Группы сигналов РП, СИ, ДИ, ДО, ВТ управляют передачей информации по системной магистрали. Сигнал СИ, вырабатываемый процессором, означает, что адрес находится на выводах системной магистрали. Этот сигнал сохраняет активный уровень до окончания текущего обмена информацией.
Сигнал РП означает, что данные приняты или установлены на информационных выводах. Этот сигнал вырабатывается пассивным устройством в ответ на сигналы ДИ и ДО.
Сигнал ДИ предназначен для организации двух процедур обмена информацией по магистрали:
ввода данных - микропроцессор вырабатывает ДИ во время действия сигнала СИ, когда он готов принять данные от пассивного устройства;
ввода адреса вектора прерывания.
Сигнал ВИ вырабатывается внешним устройством, сигнал АН вырабатывает ответ на внешний сигнал ВИ.
Сигнал ДМ вырабатывает внешнее активное устройство, требующее передачи ему системной магистрали.
Модуль ЦП содержит 16-разрядные регистры общего назначения – РОН, способные выполнять различные функции. Они могут служить в качестве накопительных регистров, индексных регистров, регистров автоинкрементной адресации, так называемых указателей стека, и для других целей. Регистры общего назначения используются для выборки операндов и записи результатов при выполнении арифметико-логических операций аналогично ячейкам памяти и регистра внешних устройств. Два регистра р6 и р7 имеют, кроме того, специальное назначение. Регистр р6 используется как указатель стека (УС) и содержит адрес последней заполненной ячейки стека. Регистр р7 служит счетчиком команд (СК) и содержит адрес очередной выполняемой команды. Обычно он используется только для целей адресации и не используется как накопительный регистр. Операции по выполнению команд с регистровым методом адресации являются внутренними по отношению к ЦП.
Блок интерфейса.
Система управления ЦППТ реализована на базе микро-ЭВМ ДВК-3 и представляет двухконтурную следящую систему автоматического регулирования. Контуры отрицательной обратной связи по угловой скорости вращения и углу поворота замыкаются с помощью фотоэлектрического импульсного измерительного преобразователя через микро-ЭВМ.
Все внешние устройства подключаются к микро-ЭВМ через интерфейс и канал типа "ОБЩАЯ ШИНА".
Интерфейс выполняет первичное дешифрирование адресов и формирует ответные служебные сигналы.
Интерфейс имеет канал выдачи данных (передача информации от микро-ЭВМ во внешние устройства) и каналы приема данных от внешних устройств. По командам "ВВОД" и "ВЫВОД" к шинам канала микро-ЭВМ подключается тот или иной канал интерфейса через шинные коммутаторы.
Цикл расчета кода управления начинается по сигналу таймера, который передается по линии ПРТ через интерфейс в канал микро-ЭВМ с частотой 150 Гц, где также имеется специальная линия для этого сигнала.
Сигнал таймера прерывает решение фоновой задачи микро-ЭВМ и процессор приступает к выполнению цикла обмена информацией с внешним устройством и расчету кода управления.
Ввод информации в микро-ЭВМ от внешних устройств выполняется по инициативе микро-ЭВМ согласно алгоритму работы канала.
Из микро-ЭВМ через шинные коммутаторы код передается на вход регистров и дешифратора.
Через 250 нс после появления кода адреса на кодовых шинах по служебной линии "СИА" передается сигнал, который инвертируется и задерживается. Код на шинных коммутаторах во время действия "СИА" держится без изменения.
Через 100 нс после выдачи сигнала "СИА" микро-ЭВМ снимает код адреса с кодовых шин канала и выдает сигнал по линии "ВВОД". Сигнал "ВВОД" разрешает работу дешифратора. Если код адреса 160770 или 160772, то выдается разрешение поступления кода с шинных коммутаторов в регистры.
Вывод информации из микро-ЭВМ во внешние устройства выполняется, по существу, по тому же циклу, что и ввод, т.е. вначале на кодовые каналы подается код адреса, далее выдается сигнал "СИА", через 100 нс, минимум после выдачи "СИА", код адреса снимается и на шины канала подается код информации, после чего выдается сигнал "ВЫВОД" по линии "ВЫВОД".
Формирование адреса и сигнала "СИА" выполняется, как и при вводе и по тем же цепям. Код выдаваемой информации держится на выходах канала типа "ОШ" Опр00-Опр15. Передаваемая информация заполняется в том блоке, адрес которого был выдан в начале цикла.
С получением сигнала "СИА", сигнализирующего о том, что выдаваемая информация принята, микро-ЭВМ снимает сигнал "ВЫВОД" и "СИА", заканчивая цикл.
Блок код-фаза.
Блок код-фаза преобразует параллельный двоичный код на выводе микро-ЭВМ в управляющие сигналы, фазовый сдвиг которых прямо пропорционален двоичному коду. Максимальная длительность импульсов сигналов в блоке код-фаза равна 120 электрических градусов.
Блок распределителя импульсов.
В распределителе импульсов осуществляется синхронизация работы микро-ЭВМ с промышленной электросетью, питающей тиристорный преобразователь. Из распределителя импульсы поступают на тиристоры выпрямительной и инверторной групп. Так как в каждой из групп содержится по три тиристора, то возникает задача распределения импульсов и формирования необходимой формы и длительности импульсов, которые после усиления поступают на управляющие электроды тиристоров. Тиристорный преобразователь выполнен по схеме раздельного управления.
Распределение импульсов по тиристорам осуществляется с помощью схем совпадения, на один из входов которых подается сигнал разрешения в пределах зоны, равной 120 градусов для каждого из тиристоров, а на другой вход идут импульсы от схемы сравнения для соответствующей группы тиристоров.
Блок преобразователя угол-код.
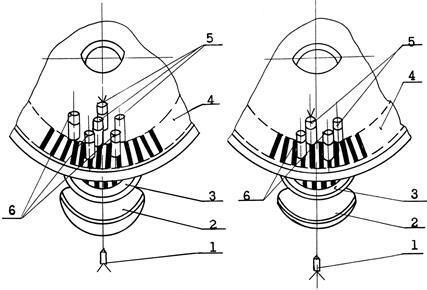
Рис. 12.5. Импульсный датчик.
Преобразователь угол-код с датчиком обратной связи в существенной мере определяет технико-экономические показатели цифрового электропривода. Датчиком обратной связи является импульсный датчик модели ВЕ-178, ВЕ-178-1 Импульсный датчик состоит из трех основных частей: механической, оптической и электронной (рис. 12.5).
Механическая часть обеспечивает точное вращение входного вала преобразователя относительно корпуса.
Оптическая часть содержит светодиод 1, линзу 2, растровую индикаторную пластинку 3 растровый диск 4, и фотодиоды 5.
Электронная часть состоит из усилителей, на входы которых подаются сигналы от фотодиодов для компенсации постоянной составляющей сигнала. Эти сигналы имеют прямоугольную форму, их амплитуды смещены относительно друг друга на 90 градусов. Частота следования импульсов пропорциональна измеряемой скорости вращения, а число импульсов углу, поворота вала электродвигателя.
Преобразователь угол-код осуществляет измерение частоты вращения, угла поворота вала двигателя в двоичном параллельном 16-ти разрядном коде. 16-й разряд является знаковым , при помощи которого осуществляется определение направления вращения: либо по часовой, либо против часовой стрелки.
По запросу от микро-ЭВМ информация о скорости и угле поворота вала электродвигателя передается в канал приема данных интерфейса.
Блок программатора.
Программатор представляет собой 16-ти разрядный регистр с тумблерами. Набранная информация с программатора через интерфейс вводится в микро-ЭВМ и может использоваться как сигнал задания по скорости и углу поворота для ЦППТ.
Индикация.
Для отображения информации об угле поворота и о частоте вращения вала электродвигателя на стенде предусмотрена цифровая индикация. Угол поворота отображается при помощи семисегментного индикатора, выполненного на светодиодах, который получает сигналы с дешифратора, переводящий двоичный код в управляющий код семисегментных индикаторов. На индикаторах при этом появляются десятичные числа, соответствующие углу поворота вала электродвигателя. Частота вращения вала электродвигателя определяется в блоке угол-код, который представляет собой двоичный счетчик. На вход двоичного счетчика поступают импульсы с датчика угла, счетчик суммирует эти импульсы в течении такта с частотой 150 Гц. Выходы счетчика соединены со светодиодами, которые высвечивают частоту вращения вала электродвигателя в двоичном коде. Старший 16-й разряд индикации частоты вращения вала электродвигателя является знаковым и высвечивает направление вращения.
12.3 Описание схемы электрической принципиальной интерфейса.
Интерфейс состоит из шести шинных формирователей ДД2—ДД5, четырех входных регистров ДД24-ДД27, восьми выходных регистров ДД16-ДД23, составного дешифратора микросхемы ДД6-ДД11, ДД13-ДД15 и формирователя ответного сигнала - ДД1, ДД12.
Шинные формирователи выполнены на микросхеме К589АП26, изображенной на рис. 12.16.
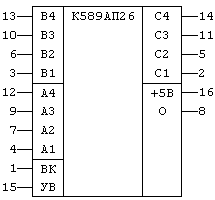
Рис. 12.6. Схема шинного формирователя К589 АП26
Шинный формирователь предназначен для согласования параллельных шин микро-ЭВМ. А1-А4 – параллельная 4-разрядная входная шина данных. В1-В4 – параллельная 4-разрядная выходная шина данных. С1-С4 – параллельная 4-разрядная двунаправленная шина данных. УВ – вход управления выдачей информации. ВК – вход выборки кристалла.
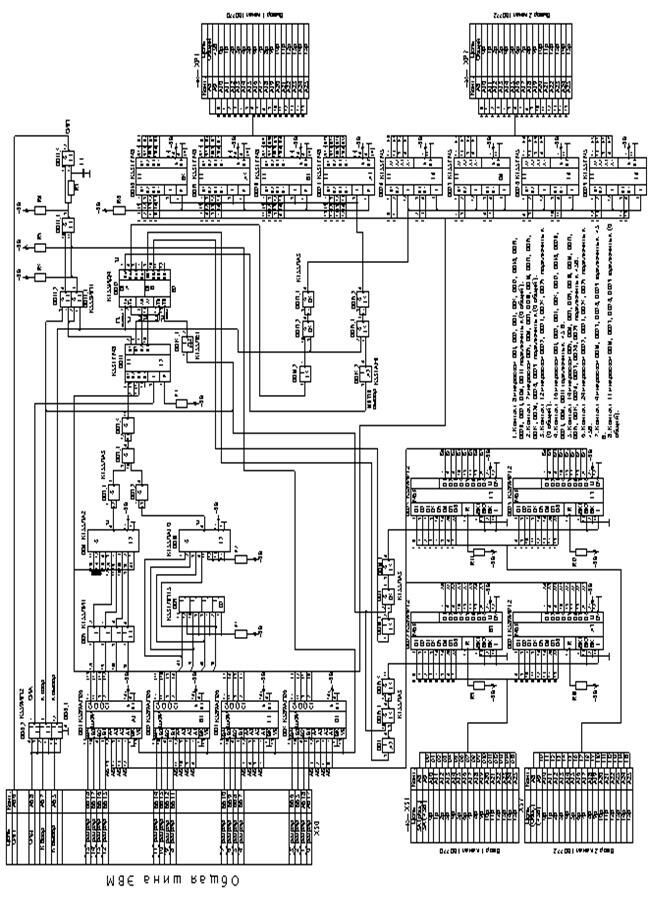
Рис. 12.7. Электрическая принципиальная схема интерфейса
Входные регистры ДД24-ДД27 выполнены на микросхеме К589 ИР12, которая изображена на рис.12. 8.
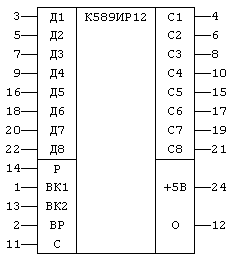
Рис. 12.8 . Схема регистра К589 ИР12.
Регистр К589 ИР12 предназначен для буферизации данных, временного и электрического согласования параллельных шин в микро-ЭВМ, выполнения функции прерывающих каналов ввода/вывода информации. Запись данных Д1-Д8 регистр происходит положительным потенциалом на входе С. Чтение информации С1-С8 производится высоким потенциалом ВР. Вход Р является входом установки нуля.
Выходные регистры ДД16-ДД23 выполнены на микросхеме К155ТМ5, которая представлена на рис. 12.9.
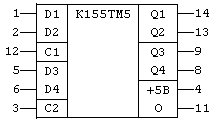
Рис.12.9. Схема регистра К155 ТМ5
Регистр состоит из двух пар Д-триггеров. Для первой пары Д1, Д2 являются входами, А1, А2 - выходами. Аналогично для второй пары ДЗ, Д4 - входы, A3, А4 – выходы. При подаче на входы разрешения Cl, С2 напряжения высокого уровня, данные, присутствующие на входах, без изменения отображаются на выходах.
Шинные формирователи связаны с общей шиной микро-ЭВМ. При общении с микро-ЭВМ сначала в шинные формирователи поступает адрес, который дешифрируется ДД6-ДД11. При появлении ответного
сигнала на выходе ДД1, ДД12 на шинных формирователях появляются данных, которые запоминаются в регистрах.
12.4 Описание электрической принципиальной схемы распределителя импульсов.
Блок распределителя импульсов состоит из трех нуль-органов ДА1-ДА3, переходных инверторов ДД4-1, ДД4-4, ДД5-3, ДД6-2, ДД7-1, ДД7-4 и т.д., формирователей импульсов ДД4-2–ДД4-3, ДД5-1–ДД5-2 и т.д., триггеров формирования рабочих зон ДД9, ДД10, ДД11 для первой группы тиристоров. Для второй группы тиристоров рабочие зоны и "0" сети формируются аналогичными элементами. Усилители-формирователи нуля фаз (нуль-органы) выполнены на ОУ К553УД1А. ОУ работают в ключевом режиме с обратной связью по постоянному току. Резисторы Р7–Р9 – ограничители тока, диоды УД1–УД6 – защита входов микросхем от перенапряжений, резисторы Р10–Р12 и конденсаторы С1–С6 служат для стабилизации работы ОУ. На входы ОУ подается напряжение трех фаз сети. Амплитуда входного напряжения 12-15В. На входах ОУ прямоугольные сигналы вида "МЕАНДР" скважностью, близкой к двум, с частотой 150 Гц. Эти сигналы с выходов ОУ через делители напряжения на резисторах Р13–Р16, Р14–Р19 и т.д. подаются на входы микросхем формирователей импульсов, которые от положительных фронтов этих сигналов формируют импульсы, длительностью не более 500 мкс, которые в свою очередь поступают на входы триггеров формирования рабочих зон. Диоды УД7–УД9 – для защиты входов микросхем от отрицательных напряжений. Рабочая зона по углу занимает 120 градусов электрической фазы сети, т.к., в трехфазной сети сдвиг фаз составляет 120 градусов, момент перехода через нуль напряжения фазы "А" соответствует началу рабочей зоны фазы "В" и т.д., поэтому для формирования, например, рабочей зоны фазы "В" на первый вход триггера подается импульс нуля фазы "А", а на второй вход – импульс нуля фазы "В". Аналогично формируются зоны фаз "А" и "С".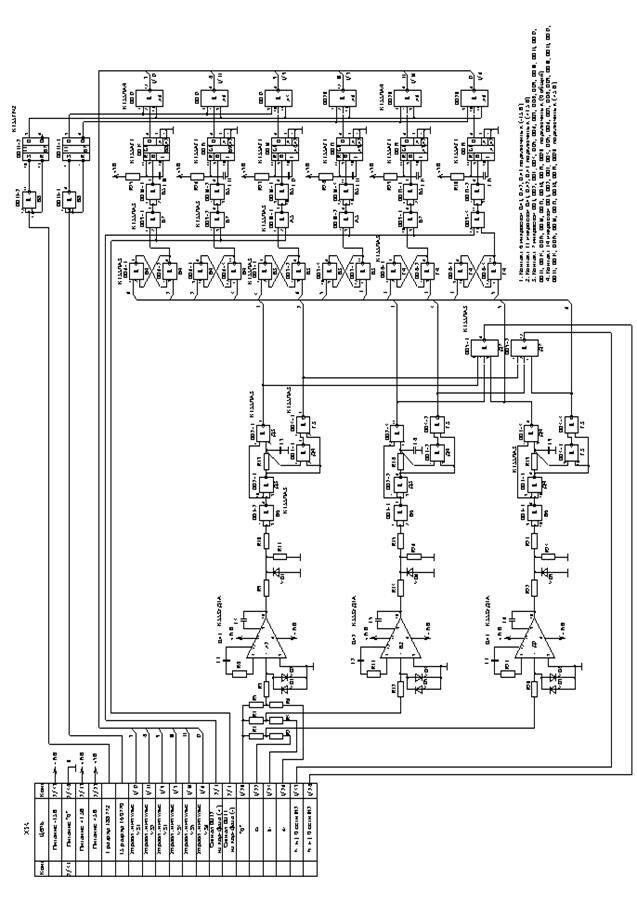
Сигналы рабочих зон поступают на вход микросхем ДД12, ДД13 и т.д., на вход этих же микросхем поступают сигналы в виде коротких импульсов из код-фазы, в результате на входе этих микросхем будут Формироваться импульсы небольшой продолжительности. Эти импульсы проходя через инверторы ДД14, ДД15 и т.д. поступают на входы одновибратаров (микросхемы ДД18–ДД22 серии К155АГ1), на выходе которого образуются импульсы, такие же как и на выходах микросхем ДД12, ДД13 но более расширенные. Они в свою очередь идут на входы микросхем ДД23, ДД24 и т.д., на выходе которых они будут проинвертированы.
Описание отдельных микросхем, входящих в распределитель импульсов.
1) К155АГ1 – одноканальный ждущий мультивибратор (рис. 12.11) формирует калиброванные импульсы с хорошей стабильностью длительности. Мультивибратор содержит внутреннюю ячейку памяти – триггер с двумя выходами и . Поскольку оба выхода имеют наружные выводы (6 и I), разработчик получает от микросхемы парафазный сформированный импульс. Триггер имеет три импульсных входа логического управления (установки в исходное состояние) через элемент Шмитта (В, А1 и А2).
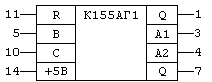
Рис.12.11. Схема мультивибратора K155 АГ1.
Сигнал сброса, т.е. окончания импульса в триггере, формируется с помощью RC-звена: времязадающий конденсатор подключается между выводами микросхемы 10 и 11, резистор включается от вывода 11 к положительной шине питания 5В. Меняя номиналы резистора Р в пределах 2–40 кОм, а конденсатора С в пределах 10пФ–10мкФ, можно менять длительность выходных импульсов от 30 нс до 0,28 с.
К293ЛП1 (А, Б) – оптоэлектронные переключатели-инверторы (рис. 12.12), состоящие из излучающего и фотоприемного элементов, между которыми имеется оптическая связь и обеспечена электрическая изоляция.
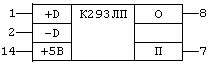
Рис. 12.12. Схема оптоэлектронного переключателя К293 ЛП.
К293ЛП (А,Б) – оптоэлектроиные переключатели-инверторы на основе диодных оптопар. В диодной оптопаре в качестве фотоприемного
элемента используется фотодиод на основе кремния, а излучателем служит инфракрасный излучающий диод – К293ЛП (А,Б) – это
оптоэлектронная интегральная микросхема (ОЭ ИМС). ОЭ ИМС называют ИМС, в которых реализована оптическая связь между отдельными узлами или компонентами с целью изоляции их друг от друга (гальванической развязки). В ОЭ ИМС кроме излучателя и фотоприемника содержатся элементы усиления сигнала, получаемого от фотоприемника и устройства формирования и обработки этого сигнала.
Отличительными особенностями ОЭ ИМС является гальваническая развязка между вводными и выходными цепями и однонаправленность распространения сигналов при практически полном отсутствии обратной связи с выхода на вход.
12.5 Описание электрической принципиальной схемы код-фаза.
Схема код-фаза состоит из триггеров ДД23-1 и ДД23-2, мультивибраторов ДД24 и ДД25, счетчиков ДД13–ДД20, сумматоров ДД9–ДД12, дешифратора ДД26, светодиодов НЛ1–НЛ32.
Работа блока происходит следующим образом: на входы микросхемы ДД21-11 подаются импульсы, получающиеся в результате перевода синусоиды трехфазного напряжения из отрицательного полупериода в положительный через нуль. Они открывают триггер ДД23 и в него записывается единица. Далее 1 поступает на ДД21-1, туда же поступают сигналы с генератора импульсов. На счетчиках происходит деление импульсов на 16. Далее импульсы поступают на входы В0–ВЗ сумматоров ДД9–ДД12. На входы А0–АЗ этих же сумматоров поступает параллельный двоичный код их микро-ЭВМ. В результате сложения на выходе сумматоров появится импульс переполнения, который сбросит триггер ДД23.1 в исходное состояние. В зависимости от кода из микро-ЭВМ, импульсы на выходах сумматоров будут появляться с различными интервалами, т.е. их фазовый сдвиг будет прямо пропорционален двоичному коду из микро-ЭВМ. Во второй части схемы происходит формирование управляющих импульсов для отрицательного полупериода синусоидального напряжения. В базовой схеме вторая часть была такая же как и первая часть, т.е. на сумматорах и счетчиках. В разработанной схеме она реализована на счетчиках и дешифраторе, с помощью которых происходит фазовый сдвиг импульсов, полученных ранее для положительного полупериода синусоидального напряжения. Разработанная схема является наиболее простой и экономичной. На светодиодах НЛ1–НЛ32 высвечивается двоичный код из микро-ЭВМ и управляющие импульсы.
На рис.12.13 изображена схема дешифратора 155 ИД3.
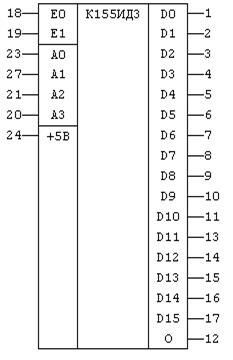
Рис.12.13.
Дешифраторы – микросхемы средней степени интеграции, предназначенные для преобразования двоичного кода в напряжение логического уровня, появляющегося на том выходе, десятичный номер которого соответствует двоичному коду. Во всех остальных входах дешифратора сигналы должны быть нулевыми.
ИМС К153ИД3 – дешифратор (см. Л1), позволяющий преобразовать четырех-разрядный код, поступающий на входы А0–АЗ, в напряжение низкого логического уровня, появляющегося на одном из шестнадцати выходов 0–15.
Дешифратор имеет 2 входа разрешения дешифрации Е0 и Е1. Эти входы можно использовать как логические, когда дешифратор ИД3 служит демультиплексором данных. Тогда входы А0–А7 используются как адресные, чтобы направить поток данных, принимаемых входами Е0 и Е1, на один из выходов 0–15. По входам Е0 и Е1 даются сигналы разрешения выходов, чтобы устранить текущие выбросы, которыми сопровождается дешифрация кодов, появляющихся не строго синхронно (например, поступающих от счетчика пульсаций). Чтобы разрешить прохождение данных на входы ЕО и Е1, следует дать напряжение низкого уровня. Когда на входах Е0 и Е1 присутствуют напряжения высокого уровня, на выходах 0–15 появляются высокие уровни.
Дешифратор К155ИД3 потребляет ток 50 мА. Время задержки распространения сигнала для цепи вход А – выход, составляет 36 нс, для цепи вход Е – выход – 30 нс.
Таблица 1. Таблица состояния дешифратора К155ИД3.
| ВХОД | ВЫХОД | ||||||||||||||||||||
| Е0 | Е1 | A3 | А2 | А1 | А0 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| Н | Н | Н | Н | Н | Н | Н | В | В | В | В | В | В | В | В | В | В | В | В | В | В | В |
| Н | Н | Н | Н | Н | В | В | Н | В | В | В | В | В | В | В | В | В | В | В | В | В | В |
| Н | Н | Н | Н | В | Н | В | В | Н | В | В | В | В | В | В | В | В | В | В | В | В | В |
| Н | Н | Н | Н | В | В | В | В | В | Н | В | В | В | В | В | В | В | В | В | В | В | В |
| Н | Н | Н | В | Н | Н | В | В | В | В | Н | В | В | В | В | В | В | В | В | В | В | В |
| Н | Н | Н | В | Н | В | В | В | В | В | В | Н | В | В | В | В | В | В | В | В | В | В |
| Н | Н | Н | В | В | Н | В | В | В | В | В | В | Н | В | В | В | В | В | В | В | В | В |
| Н | Н | Н | В | В | В | В | В | В | В | В | В | В | Н | В | В | В | В | В | В | В | В |
| Н | Н | В | Н | Н | Н | В | В | В | В | В | В | В | В | Н | В | В | В | В | В | В | В |
| Н | Н | В | Н | Н | В | В | В | В | В | В | В | В | В | В | Н | В | В | В | В | В | В |
| Н | Н | В | Н | В | Н | В | В | В | В | В | В | В | В | В | В | Н | В | В | В | В | В |
| Н | Н | В | Н | В | В | В | В | В | В | В | В | В | В | В | В | В | Н | В | В | В | В |
| Н | Н | В | В | Н | Н | В | В | В | В | В | В | В | В | В | В | В | В | Н | В | В | В |
| Н | Н | В | В | Н | В | В | В | В | В | В | В | В | В | В | В | В | В | В | Н | В | В |
| Н | Н | В | В | В | Н | В | В | В | В | В | В | В | В | В | В | В | В | В | В | Н | В |
| Н | Н | В | В | В | В | В | В | В | В | В | В | В | В | В | В | В | В | В | В | В | Н |
| Н | В | Х | Х | Х | Х | В | В | В | В | В | В | В | В | В | В | В | В | В | В | В | В |
| В | Н | Х | Х | Х | Х | В | В | В | В | В | В | В | В | В | В | В | В | В | В | В | В |
| В | В | Х | Х | Х | Х | В | В | В | В | В | В | В | В | В | В | В | В | В | В | В | В |
На рис.12.14 представлена схема сумматора К155 ИМ3.
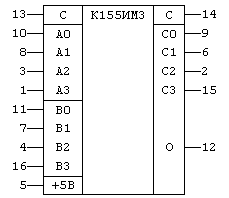
Рис.12.14 Схема сумматора К155 ИМ3.
Сумматор К155 ИМ3 – быстродействующий полный сумматор, осуществляющий арифметическую операцию суммирования двух четырехразрядных слов в двоичном коде. Первое слово входы А0–А3, второе слово входы В0–В3. Вход С – сигнал переноса. Сумма двух слов – выходы С0–СЗ. Выход С – сигнал переполнения. Сумматор работает со словами как положительной (высокий уровень – единица), так и отрицательной (низкий уровень – нуль).
Таблица 2. Суммирование чисел К155ИМ3.
| С | А0 | А1 | А2 | А3 | В0 | В1 | В2 | В3 | С0 | С1 | С2 | С3 | С |
| Н | Н | В | Н | В | В | Н | Н | В | В | В | Н | Н | В |
На рис.12.15 изображена схема счетчика К155 ИЕ5.
К155ИЕ5 – четырехразрядный двоичный счетчик-делитель (рис. 8) на 2, 4, 8, 16. Имеет две части: делитель на два (выход О0; тактовый вход С0) и делитель на восемь (выходы 01–03; тактовый вход С1). Режим работы счетчика ИЕ5 выбирается по таблице 3. При применении счетчика-делителя на 16, соединяются выводы 1 и 12.
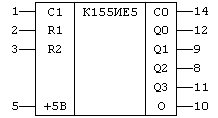
Рис.12.15. Схема счетчика К155ИЕ5.
Таблица 3. Режим работы счетчика К155ИЕ5.
| ВХОД | ВЫХОД | ||||
| Р1 | Р2 | О0 | О1 | О2 | О3 |
| В | В | Н | Н | Н | Н |
| Н | В | СЧЕТ | |||
| В | Н | СЧЕТ | |||
| Н | Н | СЧЕТ |
12.6 Описание электрической принципиальной схемы угол-код
Электрическая принципиальная схема угол-код представлена на рис. 17. На базе микросхемы DD1 и кварца C1 сопротивления R1, R2 и емкости C2 разработан генератор кварцевой частоты, выдающий высокостабильные импульсы синхронизации. При помощи счетчиков DD2, DD3, DD4 и DD5 происходит деление кварцевой частоты до 1 Гц и подача их в систему индикации ЦППТ. Импульсы с импульсного датчика, сдвинутые относительно друг друга на 90°, поступают на входы микросхем DD15, DD16, DD19, DD20, где происходит дифференцирование передних фронтов. В микросхеме DD16 происходит логическое сложение этих сигналов и подача их на вход счетчика DD7, далее на DD8, DD9, DD10. В этих счетчиках происходит накопление импульсов, преобразование их в двоичный код. При помощи светодиодов HL0–HL15 происходит высвечивание этого двоичного кода, который пропорционален скорости угла поворота вала электродвигателя. Выходы счетчиков DD7–DD10 соединены со входами микросхем DD13, DD22, DD23, DD24. При помощи микросхем DD14 и DD6-1 осуществляется определение знака направления вращения вала электродвигателя. Микросхемы DD11, DD12, DD6-2 и DD17-1 осуществляют синхронизацию работы электрической схемы угол-код с использованием частоты электрической сети 150 Гц.
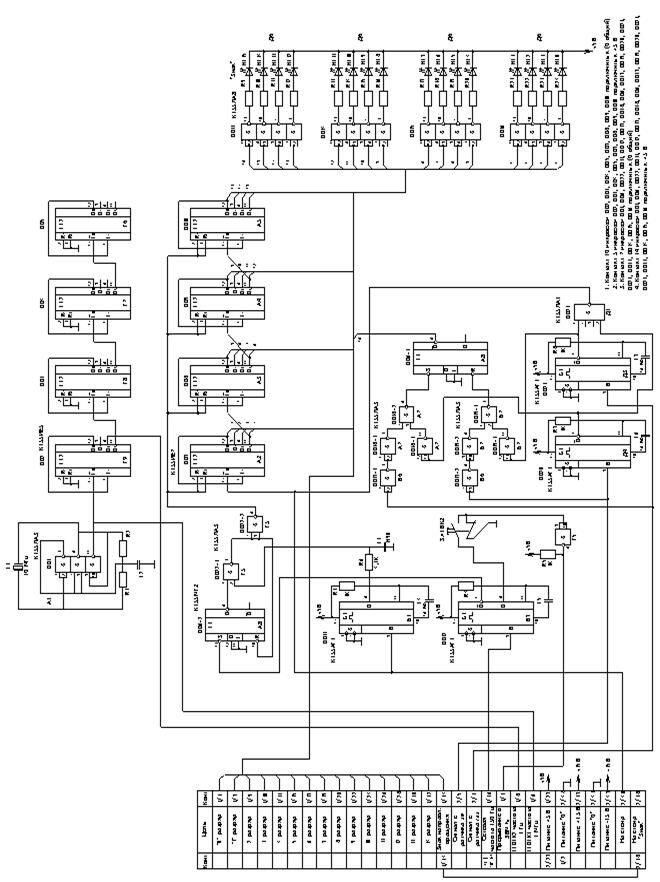
Рис. 12.16
12.7 Описание электрической принципиальной схемы цифровой индикации угла поворота.
Цифровая индикация (рис. 12.17) предназначена для отображения угла поворота вала электродвигателя в десятичном коде при помощи семисегментных индикаторов DD11–DD15, выполненная на микросхемах 3ЛС 324В. На входы 5 и 4 реверсивного счетчика DD6, далее DD7, DD8, DD9, DD10 подаются импульсы угла поворота вала электродвигателя через схему угол-код. Двоичные выходы счетчиков DD6-DD10 соединены со входами дешифраторов семисегментного кода DD1–DD5, выполненных на микросхемах КБ14 ИД2. Выходы дешифраторов соединены со входами индикации.

Рис.12.17 Цифровая индикация угла поворота.
Описание отдельных микросхем, входящих в схему индикации угла поворота.
Микросхемы DD6, DD7, DD8, DD9 представляют собой четырехразрядный двоичный реверсивный счетчик К155 ИЕ6 (рис.12.18), имеющие импульсные тактовые входы на суммирование (+1) и вычитание (-1). Состояние счетчика меняется по положительным периодам тактовых импульсов от низкого уровня к высокому.
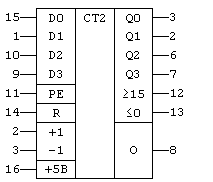
Рис. 12.18. Двоичный реверсивный счетчик К155 ИЕ6.
С выходов ³15 и £0 снимаются инверсные сигналы окончания счетов на суммирование и вычитание. Вход PE – инверсный вход записи информации в счетчик. При подаче на этот вход напряжения низкого логического уровня код, зафиксированный ранее на параллельных входах D0, D1, D2, D3, загружается в счетчик и появляется на его выходах независимо от сигналов на тактовых входах. Параллельная загрузка счетчика запрещается, если на входы сброса R подано напряжение высокого уровня.
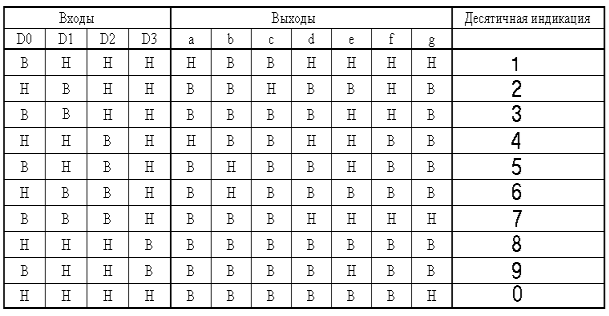
Микросхемы DD1–DD5 – дешифраторы двоичного кода в семисегментный код (К514 ИД2) – рис. 12.19.
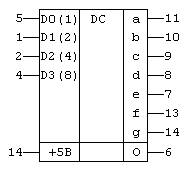
Рис. 12.19 Дешифратор К514 ИД2.
На входы D0, D1, D2, D3 подается двоичный код с реверсивных счетчиков DD6–DD10. Этот двоичный код преобразуется в семисегментный для обеспечения работы цифровой индикации. В таблице 4 представлена работа дешифратора.
Таблица 4. Состояния дешифратора К514 ИД2
12.8 Описание электрической принципиальной схемы аналого-цифровых преобразователей.
Аналого-цифровые преобразователи АЦП1, АЦП2, изображенные на рис.12.21 преобразуют ток и скорость электродвигателя в цифровой двоичный параллельный код. Через интерфейс эта информация поступает в микро-ЭВМ, где формируется сигнал управления цифровым электроприводом. Схема аналого-цифровых преобразователей представлена на рис. 12.20 и состоит из двух АЦП DD5, DD7 – микросхемы К1113ПВ1, двух генераторов импульсов DD1, DD2, DD3, DD4 – микросхемы К155ЛА3. Информация с АЦП DD5 записывается в четыре регистра DD12, DD13, DD14, DD15 – микросхемы К155 ТМ5. Записанная информация высвечивается светодиодами DD1¸DD32, нагруженными на микросхемы К155ЛА8 D16¸DD23. Входы АЦП DD5, DD7 через сопротивления R6 и R14 соединены с операционными усилителями DD4, DD6 – микросхемы К553УД1А. АЦП К1113ПВ1 рис.12.21 работает по принципу последовательного приближения, имеет внутренний источник опорного напряжения, тактовый генератор и компаратор напряжения. Для включения АЦП требуется источник питания и формирователь преобразования. АЦП имеет входные устройства с тремя устойчивыми состояниями, что упрощает его сопряжение с шиной данных микропроцессора. Несколько АЦП могут обслуживать один микропроцессор и наоборот. Режим работы АЦП в микропроцессорной системе определяется управляющими импульсами от микропроцессора. При поступлении на вход «Гашение и преобразования» микросхемы К1113ПВ1 уровня логического «0» АЦП начинает преобразование входной информации. Через время, необходимое для преобразования, на выходе АЦП «Готовность данных»
появляется сигнал с уровнем логической «1», запрашивающий вывод данных с АЦП на шину данных системы.
Приняв данные в системную магистраль, микропроцессор устанавливает на входе «Гашение и преобразования» АЦП уровень логической «1», который «гасит» информацию, содержащуюся в регистре последовательного приближения, и АЦП снова готов к приему и обработке входных данных. Микросхема К1113ПВ1 может обрабатывать входную информацию в виде однополярного аналогового напряжения до 24 В и двухполярного ±5, 12 В.
 Рис. 12.20
Рис. 12.20
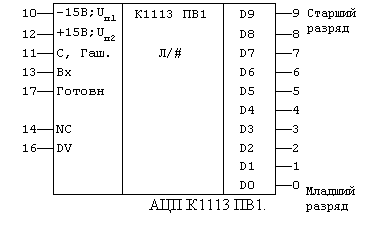
Рис 12.21
12.9 Лабораторная работа “Изучение цифрового электропривода постоянного тока с прямым микропроцессорным управлением”.
Авторы: Буянкин В.М., Кравец В.А., Семенов В.С.
ЧАСТЬ 1.
ОПИСАНИЕ ЛАБОРАТОРНОЙ УСТАНОВКИ
На рисунке !2.22 представлена функциональная схема ЦППТ, которая представляет собой трехконтурную цифровую следящую систему автоматического регулирования. Контуры отрицательной ОС замыкаются с помощью датчиков тока, частоты вращения и угла поворота вала двигателя через микроЭВМ.
ЦППТ состоит из макроЭВМ, интерфейса, преобразователя "код-фаза", распределителей импульсов, блока тиристоров, двигателя постоянного тока, тахогенератора, датчиков тока, частоты вращения и угла поворота вала двигателя, двух АЦП, преобразователя "угол-код", таймера, программатора и нагрузочного устройства.
МикроЭВМ выполняет функцию обработки сигналов с датчиков ОС, осуществляет заданную программу движения. Адаптивный перестраиваемый регулятор, который реализуется программным путём, обеспечивает оптимальные параметры работы ЦППТ.
Кроме того, микроЭВМ осуществляет диагностику работы блоков и yстройств ЦППТ. Канал связи с внешними устройствами в микроЭВМ представляет собой общую шину.
Интерфейс обеспечивает связь внешних устройств с микроЭВМ, дешифрирует адреса датчиков ОС и формирует ответные служебные сигналы. Дешифрованные сигналы соответствующих разрядов используются в качестве сигналов адреса блоков ЦППТ. Интерфейс имеет два канала для передачи от микроЭВМ во внешние устройства и приема данных с внешних устройств. По командам ВВОД или ВЫВОД к общей шине канала микроЭВМ подключаются те или иные внешние устройства.
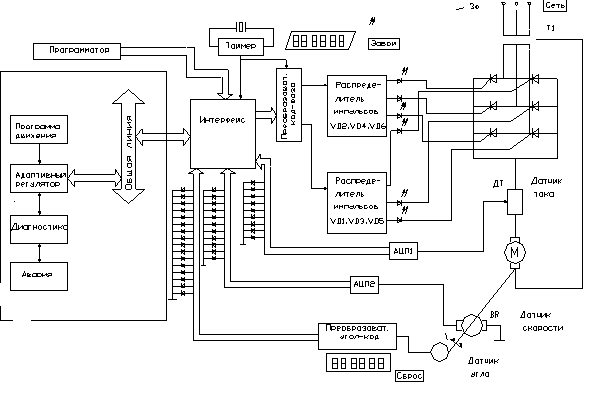
Рис. 12.22
Преобразователь "угол-код" осуществляет измерение угла поворота вала двигателя в параллельном двоичном коде с пятнадцатью разрядами. По запросу от микроЭВМ информация передается в канал приема данных интерфейса.
Преобразователь "код-фаза" преобразует параллельный двоичный код на выходе микроЭВМ в управляющие импульсы, фазовый сдвиг которых прямо пропорционален двоичному коду. Распределители импульсов в определенной последовательности обеспечивают на управляющих электродам тиристоров VDI...VD6 управляющие импульсы.
Таймер, в основу которого входит кварцевый генератор, выдает высокостабильную частоту временных сигналов для синхронизации работы всех узлов ЦППТ.
А Ц П служат для преобразования аналоговых сигналов с датчика тока и тахогенератора в параллельный двоичный код и передачи этих сигналов в мцкроЭВМ.
Блок тиристоров состоит из тиристоров и трехфазного трансформатора, вторичные обмотки которого соединяются а трехфазную звезду с нулевым выводом. Трансформатор согласует напряжение сети с напряжением питания электродвигателя и ограничивает токи коротких замыканий. Электродвигатель одним концом подсоединяется к нулевому выводу вторичных обмоток трансформатора, а другим - к инверторной и выпрямительной группам тиристоров.
Датчик тока представляет собой измерительное устройство резистивного типа.
Тахогенератор - это элемент систем автоматического регулирования, входным параметром для которого служит частота вращения (угловое положение)вала тахогенератора, а выходным - напряжение, прямо пропорциональное входной величине.
Датчик обратной связи BE-I78 импульсного типа включает в себя три основные части: механическую, оптическую и электронную.
Механическая часть обеспечиваат точное вращение входного дала преобразователя относительно корпуса.
Оптическая часть содержит светодиод, линзу, растровую индикаторную пластинку и растровый диск, а также фотодиоды.
Электронная часть состоит из усилителей, на входы которых подают сигналы от фотодиодов для компенсации постоянной составляющей сигнала. Эти сигналы имеют прямоугольную форму, их амплитуды смещены относительно друг друга на 90°. Частота следования импульсов пропорциональна измеряемой скорости вращения, а число импульсов - углу поворота вала двигателя.
Для отображения информации об угле поворота и частоте вращения вала электродвигателя на стенде предусмотрена цифровая индикация. Угол поворота отображается при помощи выполненного на светодиодах семисегментного индидатора, который получает сигналы с дешифратора, переводящего двоичный код в управляющий код семисегментных индикаторов. На индикаторах при этом появляются десятичные числа, соответствующие углу поворота вала электродвигателя.
При помощи программатора осуществляется кодовое задание параметров в микроЭВМ.
Нагрузочное .устройство, состоящее из автотрансформатора T2, вольтметра PV , амперметра РА и порошковой муфты , служит для создания момента нагрузки на валу двигателя, который прямо пропорционален току, протекающему в цепи порошковой муфты (см. схему на лабораторной стенде).
Лабораторная установка состоит из микроЭВМ ДВК-3, управление которой осуществляется с клавиатуры, программатора и силового агрегата, смонтированного на опорной металлической конструкции. Электронные функциональные блоки расположены в специальном устройствв (под ЭВМ). Для работы с микро ЭВМ необходимо ознакомиться с инструкцией по эксплуатации.
Рядом с ЭВМ расположен стенд, на котором представлена функциональная схема цифрового электропривода с цифровой индикацией. Для исследования формы сигналов с датчика тока, тахогенератора и датчика угла на стенде имеется осциллограф.
ЗАДАНИЕ
1. Исследовать структурную схему ЦППТ с разомкнутой обратной связью, установить назначение .и рассмотреть функционирования каждого элемента стенда.
2. Определить естественные характеристики ЦППТ с разомкнутой ОС.
3. Задавая минимальную и максимальную частоту вращения вала двигателя, определить диапазон ее регулирования.
4. Исследовать структурную схему ЦППТ с замкнутой ОС, установить назначение и рассмотреть функционирование каждого элемента стенда.
5. Определить характеристики ЦППТ с замкнутой ОС.
6. Задавав минимальную и максимальную частоты вращения вала двигателя, определить диапазон их регулирования.
7. Исследовать влияние дискретности по времени на статические характеристики ЦППТ.
8. Определить форму сигналов ЦППТ с помощью осциллографа.
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
I. Исследование разомкнутой системы ЦППТ;
1.1. Ознакомиться со структурной схемой ЦППТ и зарисовать функциональную схему в отчет.
1.2. Установить назначение и функциональное действие каждого элемента стенда.
1.3. Включить с разрешения преподавателя стенд и микроЭВМ.
Для этого необходимо:
а) нажать клавишу <СЕТЬ> , дождаться свечения светодиода <СЕТЬ> ;
б) нажать клавишу <УПР>
в) нажать клавишу < ПУЛЬТ > , дождаться свечения светодиода <ПУЛЬТ> ;
г) повторно нажать клавишу <ПУЛЬТ> , при этом светодиод < ПУЛЬТ > погаснет;
д) нажать на верхние части, замков левого и правого дисководов и открыть их;
е) вставить системную и рабочую дискеты в прорезь левого и правого дисководов (в левый дисковод - системную, а в правый - рабочую), а затем закрыть замки обоих дисководов (системная и рабочая дискеты выдаются преподавателем);
ж) набрать на клавиатуре команду <В>, затем <МХО>; после запроса ЭВМ на подтверждение команды нажать <Y> - машина готова к работе.
1.4. Вызвать программу PRIV1 , которая соответствует разомкнутой схеме ЦППТ.
1.5. Задать по запросу диалоговой программы максимальную я минимальную частоты вращения вала электродвигателя и определить диапазон регулирования его частоты вращения D=Wmax/Wmin .Занести результат в отчет.
1.6. Определить по показаниям приборов стенда механическую характеристику ЦППТ Wдв=f(Мдв), начертить полученный график в отчете.
1.7. Определить жесткость механической характеристики b = D M дв/ D w дв. Результат записать в отчет.
2. Исследование ЦППТ с обратной связью по скорости:
2.1. Ознакомиться со структурной схемой ЦППТ с ОС по скорости и зарисовать функциональную схему в отчет.
2.2. Установить назначение и функциональное действие каждого элемента стенда.
2.3. Включить микроЭВМ, если до этого она была выключена (см. п. 1.3).
2.4. Вызвать на выполнение программу PRIV2 .
2.5. Выбрать по запросу диалоговой программы режим работы ЦППТ с ОС по скорости.
2.6. Задавая минимальную и максимальную частоты вращения электродвигателя (см. п. 1.5), рассчитать его диапазон регулирования l . Результат занести в отчет.
2.7. По показаниям приборов стенда (см. п. 1.6) определить одну из механических характеристик ЦППТ w дв=f(Mдв). Начертить полученный график в отчете.
2. 8. Меняя коэффициенты . усиления k1, k2 в цепи обратной связи (численные значения задаются преподавателем), получить семейство механических характеристик w дв=f(Mдв) Результаты занести в отчет.
2.9. Для каждой механической характеристики определить жесткость, занести результаты в отчет и сделать выводы о влияния коэффициентов k1, k2 на жесткость механической характеристики.
3. Исследование влияния дискретности по времени на работу ЦППТ:
3.1. Ввести в микроЭВМ программу PRIV3 . Эта программа работает о дискретностью, по времени равной 6 мс.
3.2. Согласно первой графе таблицы, набрать код на программаторе в восьмеричной системе счисления. Наблюдая за работой ЦППТ, заполнить таблицу.
| Код программатора | Тахоге-нератор | Распре-делитель импульсов | Ток якоря двигателя | Датчик угла | АЦП1 | АЦП2 | Преобразователь "угол-код" |
| 778 7778 77778 1000778 1077778 |
3.3. Наблюдать при помощи осциллографа форму исследуемых сигналов в точках, зарисовывая ее на отдельных листах миллиметровки с использованием необходимых масштабов.
3.4. Ввести в микроЭВМ программу PRIV4 , в которой дискретность по времени увеличена в два раза. Повторить эксперимент по пп. 3.2, 3.3.
3.5. Ввести в “микроЭВМ программу PR1V5 , в которой дискретность по времени увеличена в три раза. Повторить эксперимент по пп, 3.2, 3.3. Сделать необходимые выводы о влиянии дискретности по времени на работу ЦППТ.
СОДЕРЖАНИЕ ОТЧЕТА
Отчет о проделанной работе является составной ее частью. Он должен содержать наименование работы, фамилию и инициалы исполнителя, номер группы и дату выполнения.
В отчете должны быть представлены функциональная схема ЦППТ, осциллограммы исследования, результаты опытов и соответствующие расчеты в
виде таблиц и графических построений (см. пункты задания). Записи по каждому опыту необходимо начинать о его наименования.
Отчет выполняется аккуратно с соблюдением: ГОСТа, графические построения необходимо делать с использованием чертёжных инструментов.
12.10 Изучение цифрового электропривода постоянного тока с прямым микропроцессорным управлением.
Авторы Буянкин В.М. Кравец В.А. Семенов В.С.
ЧАСТЬ 2
Цель работы - ознакомление с основными техническими характеристиками ЭВМ ДВК3, являющейся одним из основных элементов цифрового электропривода постоянного тока с прямим микропроцессорным управлением (ЩШГ) (его функциональная схема рассмотрена в работе С 5 ]); изучение
элементов программирования на языке ассемблера ЭВМ ДВК-3; исследование различных режимов работы ЦДГГГ.
ТЕОРЕТИЧЕСКАЯ ЧАСТЬ
С точки зрения теории автоматического управления современные электроприводы представляют собой замкнутые отрицательными обратными связями (ОС технические системы с включенными в них ЭВМ. ЭВМ выполняют функцию обработки сигналов с датчиков ОС, задают программу движения. На
их базе реализуется программно-перестраиваемый адаптивный регулятор, оптимизирующий параметра работы ЦППТ. Кроме того, ЭВМ диагностирует работу блоков и устройств ЦППТ. Это позволяет достичь высокой точности регулирования параметров и возможности быстрой переналадки без изменения аппаратной части - только о помощью изменения программного обеспечения ЭВМ, входящей в контур управления ЦППТ.
Тип ЭВМ, ее технические характеристики непосредственно влияют на диапазон регулирования параметров и их число, а также на стоимость установка в целом. Поэтому к применению в
ЦППТ можно рекомендовать минимальную по цене ЭВМ, обеспечивающую его заданные параметры управления.
В частности, в лабораторной установке, структурная схема которой представлена на рис. I, используется стандартная микроэвм ДВК-3 со следующими техническими характеристиками: разрядность для чисел и команд . .. 16 двоичных разрядов
Число регистров общего назначения (РОК). 8
Число команд языка ассемблера.................... 61
Емкость ОЗУ .............................................. 16 Кбайт
Время выполнения двухадресных команд типа
"сложение" 4
|
|
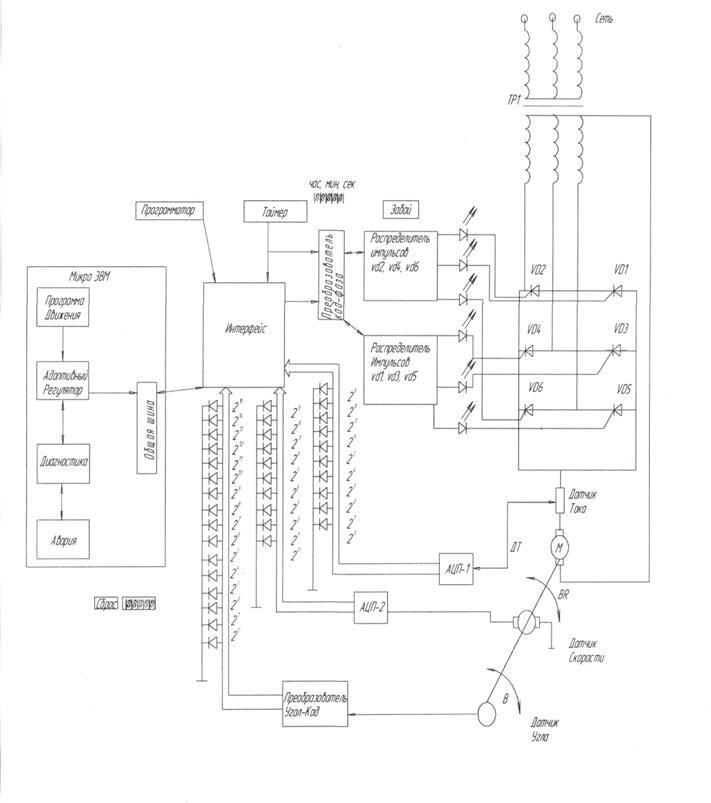
Рис.12.23
Микроэвм ДВК-3 относится к семейству ЭВМ "Электроника", в которое также входят машины типа ДВК, "Эявктроника-60". "Эяектроника-85", СМ-1420, СМ-3 и СМ-4. Это семейство в настоящее время является в России одним из наиболее распространенных после ЭВМ типа IBM PC. Однако следует подчеркнуть, что машины рассматриваемого семейства программно - совместимы с ЭВМ типа IBM PC.
Любая ЭВМ имеет собственный, зависящий от ее структуры, язык программирования - язык машинных кодов. Он представляет собой совокупность двоичных кодов операций поэтому мало пригоден для программирования сколько-нибудь сложных задач. Поэтому широкое распространение получили языки программирования ,не совпадающие с машинными кодами и более удобные для использования.
По степени близости к машинным кодам языки программирования принято делить на две группы: низкого и высокого уровня.
К первой группе относят языки ассемблеров, являющиеся набором мнемокодов, соответствующих почти полностью машинным кодам данной ЭВМ. Существует не один, в множество языков, которые обычно совместимы только с языками ассемблеров внутри своего семейства ЭВМ (например, ассемблеры семейства ЭВМ "Электроника" несовместимы с аналогичным» языками семейства IBM PC), При переводе в язык машинных кодов каждый оператор, представляющий отдельную мнемонику, заменяется цифровым кодом команды.
Языки высокого уровня дат возможность описывать алгоритмы в удобной для пользователя форме, которая близка к обычной записи математических и логических действий. Их использование сокращает трудоемкость программирования. К таким языкам относятся Бейсик, Паскаль, Фортран, ПЛ и др. Их операторы соответствуют нескольким машинным кодам.
Следует заметить, что в технической литературе иногда отдельно выделят языки "среднего" уровня, к которым причисляют, например, языки С и C++.
Машинные коды, а следовательно, и операторы языков ассемблеров по своему назначению могут быть разделаны на семь групп:
1) команды пересылки, обмена, побитового сброса и установки;
2) арифметические команды и команды модификации;
3) логические команды, команда сдвига, сравнения и проверки;
4) команды передачи и возврата управления;
5) команда управления признаками условий;
6) команда управления прерываниями и спецкоманды;
7) команда обмена между адресными пространствами текущего
и предыдущего режимов.
Команды пересылки, обмена, побитового сброса я установки предназначены для перемещения данных между парами регистров, ячеек памяти, для обмена местами байтов в слове, а также для сброса и установки заданных битов в слове.
Арифметические команда и команды модификации обеспечивают выполнение арифметических операций и операций над содержимым слова или байта.
Логические команды, команды сдвига, сравнения и проверки предназначены для выполнения операций над однословными и байтовыми данными, которые находятся в регистрах или ячейках памяти компьютера.
Команда передачи и возврата управления образует большую группу команд, в которую входят команда, например, условного и безусловного переходов.
Команды управления признаками условий в слове состояния процессора дают возможность принудительно устанавливать или сбрасывать все или некоторые признаки условий.
Команда управления прерываниями и спецкоманды включены в группу, предназначенную для принудительного инициирования прерывания и возврата к прерванной программе.
Команда последней, седьмой, группы обеспечивают обмен информацией между стеком текущего режиме, микропроцессора и областью или операндом, находящимся в адресном пространстве предыдущего режима.
Программа, написанная на языке ассемблера ЭВМ типа ДВК, представляет собой последовательность операторов, каждый из которых записан в формате, содержащем четыре поля:
метка: операция операнда комментарий
В рассматриваемом языке ассемблера рекомендуется располагать поля следующим образом: метки (может отсутствовать) - с позиции 1; операции -с позиции 9; операндов -с позиции 17; комментария (если он есть) - с позиции 33.
Поле метки служит для идентификации конкретного оператора. В качестве метки используется имя, состоящее из букв и цифр и начинающееся о буквы. После метки всегда ставится двоеточие, служащее ограничителем поля метки.
Поле операции задает действие, которое должно быть выполнено оператором, и в нем располагается некоторая мнемоника.
Поле операндов предназначено для записи объектов, над которыми оператор будет выполнять действия.
Поле комментария всегда начинается точкой о запятой и содержит текст, поясняющий действия, выполняемые оператором, программой или отдельными ее частями. В тексте комментария допустимы буквы русского алфавита.
В языке микроэвм ДВК-3 используется три типа команд: безадресные, одноадресные я двухадресные. В безадресных командах код команда содержит только код операции, в кодах одноадресных и двухадресных команд обычно содержится информация, которая представляет выполняемую функцию, метод адресации я регистры общего назначения, используемые при выборе операндов.
Процесс программирования на языке ассемблера мало чем отличается от такого же процесса на языках высокого уровня и включает в себя следующие этапы:
1) математическая формулировка задачи;
2) разработка алгоритма решения задачи;
3) составление программы на алгоритмическом языке.
ОПИСАНИЕ ЛАБОРАТОРНОЙ УСТАНОВКИ
ЦППГ, структурная схема которого представлена на рис. 12.23, состоит из микроэвм, интерфейса, преобразователя "код - фаза", распределителей импульсов, блока тиристоров, двигателя постоянного тока, тахогенератора, датчиков тока, частоты вращения и угла поворота вала двигателя, двух АЦП, преобразователя "угол -код", таймера, программатора и нагрузочного устройства.
Лабораторная установка состоит из ЭВМ ДВК-3, управление шторой осуществляется с клавиатуры, программатора и силового агрегата, смонтированного на опорной металлической конструкции. Электронные функциональные блоки расположены в специальном устройстве (под ЭВМ). Для работы с микроэвм необходимо ознакомиться с правилами по ее эксплуатации (см. разд. "Порядок выполнения работы"). Рядом с ЭВМ расположен стенд, на котором представлена функциональная схема электропривода о цифровой индикацией. Для исследования формы сигналов, а также для измерения угловых скоростей используются тахометр и тахогенератор.
1. Ознакомиться со структурной схемой управления ЦППТ (см. рис. I, а также [ 5 ] ).
2. Ознакомиться с принципами программирования системы
управления ЦППТ (рис. 2).
3. Изучить правила обращения с микроэвм (он. разд. "Поря
док выполнения работы").
4. Ознакомиться с тахограммами ф = ф (t) привода (рис.12.25).
5. С помощью готовых программ реализовать на стенде заданные тахограммы (см. рис. 12.25).
6. Сравнить результаты эксперимента с заданными значениями
угловых скоростей.
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1 . Ознакомиться со структурной схемой управления ЦППТ (см. рис. I) и зарисовать в отчет часть этой схемы, иллюстрирующую назначение микроэвм.
2. Ознакомиться с принципами программирования системы
управления ЦППТ (см. разд. "Теоретическая часть").
2.1. Установить, какие из известных алгоритмических языков
могут быть использованы для программирования работы ЦППТ.
2.2. Выявить принципиальные отличия языков ассемблеров от
языков высокого уровня.
3. Перед началом работы с микроэвм изучить основные правила обращения с ней (см. п. 5).
4. Ознакомиться с тахограммами угловых скоростей j = j( ) (см. рис. 12.25).
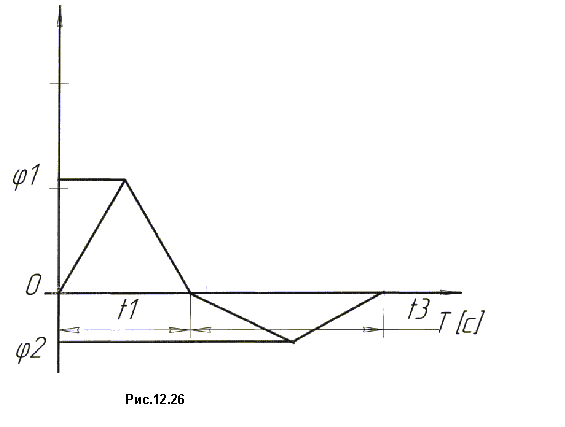
4. 1 . Рассмотреть тахограммы скоростей ф = ф (t) изображенные на рис. 12.26, в которых не учтены переходные процессы.
4. 2. Занести тахограммы в отчет.
| Рис. 12.24 |
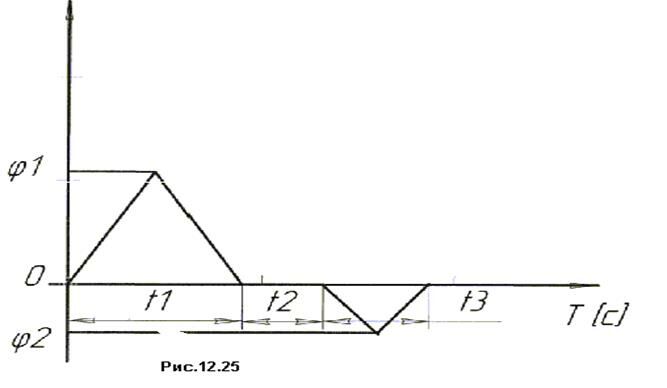
4.3. Обратиться к преподавателю, который задает числовые значения скоростей и временных интервалов. Эти значения зафиксировать на рисунках в отчете. 5. Реализовать на стенде заданные тахограммы.
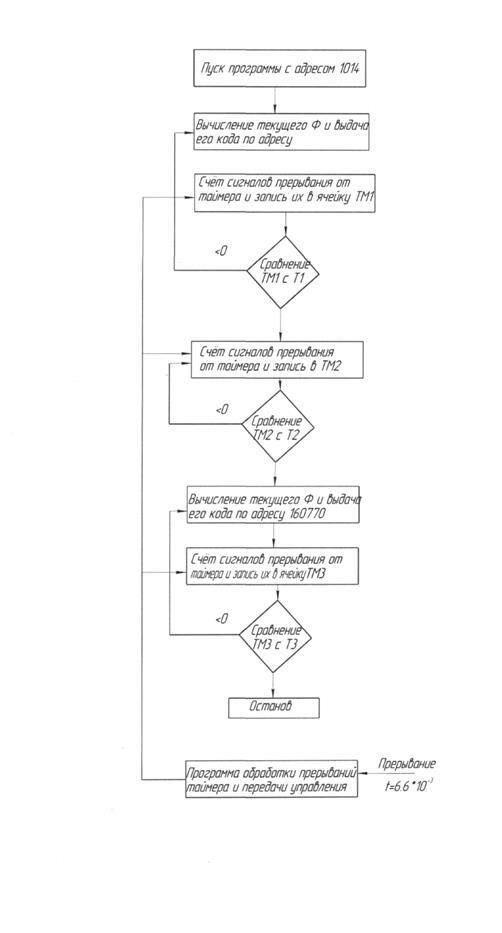
5.1. С помощью блок-схемы программ PRIMER 1 , служащей
для получения тахограмм, приведенных на риc. 12.25,26, определить
назначение каждого блока этой схемы (см. рис.12.24).
5.2. Установить, каким образом осуществляется отсчет временных интервалов в ЭВМ, ввод значений
скоростей и вывод их
в соответствующие порты.
5.3. Для реализации тахограмм. приведенных на рис12.25,26,
запустить программу PRIMER 1. Для этого необходимо:
5.3.1. С разрешения преподавателя взять дискету с рабочей
программой.
5.3.2. Включить с разрешения преподавателя стенд и
микроэвм. Для этого необходимо:
а)Нажать клавишу <Сеть>, дождаться свечения светодиода < СЕТЬ> ;
б) нажать клавишу < УПР >;
в) нажать клавишу < ПУЛЬТ > дождаться свечения диода < ПУЛЬТ > ;
г) повторно нажать клавишу < ПУЛЬТ >, светодиод погаснет;
д) нажать на верхние части замков левого и правого дисководов и открыть их;
е) вставить системную и рабочую дискеты в прорезь левого и правого дисководов (в левую прорезь
- системную, в правую -рабочую дискеты), а затем закрыть замки обоих дисководов (системную дискету
взять у преподавателя) .
5.3.3. Вызвать программу PRIMER 1.
5.3.4. Образовать объектный модуль командой
MACRO/LIST; ТТ : _МХ1: имя, МАС<ВК>
5.3.5. Сформировать загрузоч ны и модуль командой
LINK_имя. OBJ <ВК>
5.3.6. Запустить программу два раза (в соответствия
о рис. 12.25 а затем - с рис. 12.26). Для этого необходимо:
а) набрать команду
GET_MX1: имя. SAV <ВК> .
б) ввести по запросу ЭВМ значения временных интервалов
tb t2, t3 соответствующих рис. 3.
Время t( занести в ячейку памяти с адресом 1004 командой
1004/t! <BK>
Время t2 - в ячейку с адресом 1006 командой
2
1004/12 <ВК>
Время; 13 - в ячейку с адресом 1008 командой 1008/t3<BK>
в) перевести значения скоростей q)(VDT) и ф в восмиричную систему счисления и ввести их в ЭВМ в ячейки памяти с адресами 1000 и 1002 соответствующей командой. Если
направление вращения - по часовой стрелке, то значения ф} и вводятся в прямом коде, если против - то в обратном:
1000/VD1 <ВК> 1002/VD1 <ВК>
г)повторно запустить программу PRIMER 1 (для получения тахограмм изображенных на на рис. 4). Для этого следует полностью повторить действия, описанные в подпунктах а), б), в) п. 5.3.6, изменив только численные значения величин ti, t2, t3, VD1, VDZ.
5.3.7. Вызвать программу PRIMER 2.
5.3.8. Сформировать объектный, а затем загрузочный модули
командами, приведенными в пп. 5.3.4 и 5.3.5 (изменяется лишь
вводимое имя программы).
5.3.9. Запустить программу два раза (в соответствии
с рис. 5, а затем - с рис. 6). Для этого полностью повторить действия, описанные в подпунктах а) и в) п. 5.3.6. В подпункте в) дополнительно вводятся значения интервалов t и t командами (время t занести в ячейку памяти с адресом DID):
1010/14 <ВК>
и (время ts занести в ячейку памяти с адресом 1012) 1012/t5<BK>
5.3.10. Повторно запустить программу PRIMER 2 (для по
лучения тахограммы, изображенной да рис. 6). Для этого повторить п. 5.3.9, изменив численные значения t ti, t2, t3, t4, ts, VD1 и VD2.
6. Проконтролировать правильность работы ЦППТ.
6.1. С помощью тахометра (тахогенератора) и осциллографа
измерить скорости вращения двигателя и соответствующие им временные интервалы. Данный пункт выполняется при каждом запуске программ PRIMER 1 и PRIMER 2.
6.2. Результаты измерений по п. 6.1 занести в четыре таблицы по примеру таблицы, приведенной
ниже:
| t | |
| t1 | |
| t2 | |
| t3 | |
| t4 | |
| t5 |
СОДЕРЖАНИЕ ОТЧЕТА
Отчет о проделанной работе является составной частью лабораторной работы. Он должен содержать наименование работы, фамилию и инициалы исполнителя, номер группы и дату выполнения.
В отчете должны быть представлены часть функциональной схемы ЦППТ, иллюстрирующая назначение ЭВМ, тахо граммы скоростей с заданными числовыми значениями и соответствующими временными интервалами, а также таблицы с результатами экспериментов. Отчет выполняют аккуратно, соблюдая ГОСТы, графические построения делают чертежными инструментами.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1 . Каково назначение ЭВМ в контуре управления ЦППГ?
Обратите внимание на лекцию "12 Требования к надежности эс при проектировании".
2. На какие группы делятся языки программирования?
3. Чем отличаются от других алгоритмических языков языки
ассемблеров?
4. На какие группы могут быть разделены операторы языков ассемблеров?
5. Как осуществляется отсчет временных интервалов в про
граммах! используемьдс в работе?
6. В каком коде вводятся значения скоростей вращения?
7. В какие ячейки выводятся значения скоростей вращения?

















