
Структурные схемы и передаточные функции тягового электродвигателя как линеаризованного объекта регулирования
1. Структурные схемы и передаточные функции тягового электродвигателя как линеаризованного объекта регулирования.
2. Структурные схемы и передаточные функции разомкнутых и замкнутых САР. 3. Структурные схемы и уравнения переходных процессов в САР ЭПС.

Структурные схемы САР составляют обычно по их функциональным схемам. При этом разделение элементов на звенья выполняют так, чтобы каждое звено можно было описать простейшей передаточной функцией, соответствующей одному из типовых звеньев. Задающие элементы на структурных схемах обычно не показывают. Если в структурной схеме, помимо главной обратной связи (ГОС), имеются местные обратные связи, то такие схемы предварительно преобразовывают в соответствии с известными правилами.
Многоконтурные САР ЭПС, у которых во внешнем контуре выполняется регулирование скорости, а во внутреннем – регулирование тока (см. рис. 6.10), имеют особенность, связанную с тем, что постоянные времени этих контуров отличаются примерно на два порядка. Постоянная времени внутреннего контура регулирования тока определяется реактивным (индуктивным) и активным сопротивлениями электрической цепи ЭПС и составляет десятые и даже сотые доли секунды. Постоянная времени внешнего контура регулирования скорости определяется инерционностью поезда и составляет единицы и десятки секунд.
В связи с этим при рассмотрении переходных процессов во внутреннем контуре регулирования тока скорость движения поезда можно считать неизменной и работу внешнего контура не учитывать. Кроме того, при расчётах внешнего контура внутренний может быть заменен одним эквивалентным апериодическим звеном с коэффициентом усиления, равным единице, и постоянной времени, определяемой по графику переходного процесса во внутреннем контуре регулирования.
В отличие от функциональных схем, которые поясняют принцип действия систем автоматического регулирования, структурные схемы дают представление о характере преобразования сигналов в системах как при статических (установившихся), так и при динамических (неустановившихся или переходных) процессах. На основании структурных схем можно выполнить математическое описание процессов, протекающих в системе, и оценить основные свойства систем: устойчивость и качество регулирования; они позволяют графически изобразить взаимодействия элементов в сложных системах, что упрощает исследование таких систем. Структурной называется такая схема, в которой каждой математической операции преобразования сигнала соответствует определенное динамическое звено.
В отличие от элемента функциональной схемы динамическое звено не обязательно должно быть конструктивно обособленным устройством. Такими звеньями могут быть отдельные части элементов и объектов регулирования – обмотки возбуждения или якоря электрических машин, обмотки управления магнитных усилителей и т.п. Иногда могут вводиться динамические звенья, не связанные непосредственно с функциональными элементами, а лишь характеризующие математические зависимости между некоторыми координатами.
Составление уравнений для регулируемой величины и ошибки САР по структурной схеме обычно выполняют для линейных или линеаризованных систем при малых отклонениях от установившегося состояния задающих и возмущающих воздействий. Поэтому такие уравнения нельзя использовать для расчетов всех возможных режимов работы ЭПС. Так, при исследованиях переходных процессов в САР ЭПС, возникающих при трогании поезда, входе в режим электрического торможения, отключении установившегося режима работы и т.п., необходимо учитывать реальные нелинейные характеристики всех функциональных элементов. В этом случае исследование переходных процессов в САР ЭПС выполняют на ЭВМ; структурные схемы не составляют, описывая переходные процессы непосредственно системой нелинейных дифференциальных уравнений.
Рекомендуемые материалы
Если изменение входной координаты звёна х приводит к изменению его выходной координаты у, а изменение у никак не сказывается на величине х, то такое звено называют звеном направленного действия. Свойство направленности обычно возникает при усилении входного сигнала по мощности.
Пассивные звенья (рычаг, зубчатая передача, цепочки R, L, С и др.) свойством направленного действия не обладают.
Процесс преобразования сигналов в любой системе может быть описан с помощью передаточных функций W(р), частотных W(jω) и импульсных k(t)-характеристик. Поэтому считают, что каждому звену соответствуют определенные W(р), W(jω) и k(t). Удобно c не которыми приближениями свести всю совокупность динамических звеньев к ряду типовых, динамические свойства которых, выражаемые с помощью W(р), W(jω) k(t), были изучены в курсе «Теория автоматического управления».
Используя структурную схему системы, можно определить для неё W(р) и k(t), исходя из соответствующих функций отдельных типовых динамических звеньев.
Тяговый двигатель как линеаризованный объект регулирования. В системах регулирования процессов тяги и торможения ЭПС объектом рёгулирования обычно считают тяговый двигатель. Различия в способах возбуждения, режимах работы и выборе координат обусловливают различия в структурных схемах и передаточных функциях двигателя.
Статические характеристики двигателей – зависимости от тока якоря магнитного потока Ф(i), скорости v(i) и силы тяги F(i) – а также характеристика индуктивности L(i) нелинейны. Нелинейность зависимостей обусловлена кривой намагничивания, влиянием вихревых токов и размагничивающим действием реакции якоря.
В первом приближении, рассматривая тяговый двигатель как линеаризованное звено, можно допустить, что отклонения входных величин от установившихся значений малы. В пределах этих малых отклонений регулируемые величины можно заменять отрезками касательных к графикам нелинейных зависимостей в точках, соответствующих установившемуся режиму, описываемых исходными величинами uк0, i0, Fк0 и т. д. Можно также пренебречь и влиянием вихревых токов.
 Структурную схему составляют, рассматривая последовательно уравнения, описывающие преобразования величин в двигателе. Например, после преобразования напряжения uк в ток i рассматривают преобразование тока i в силу тяги Fк, а Fк – в скорость v. Для каждого преобразования определяют соответствующую передаточную функцию.
Структурную схему составляют, рассматривая последовательно уравнения, описывающие преобразования величин в двигателе. Например, после преобразования напряжения uк в ток i рассматривают преобразование тока i в силу тяги Fк, а Fк – в скорость v. Для каждого преобразования определяют соответствующую передаточную функцию.
Рассмотрим наиболее характерные структурные схемы для распространенных видов регулирования и условий работы двигателей последовательного возбуждения.
Стабилизация скорости регулированием напряжения uк. В качестве исходной можно принять упрощенную схему рис. 7.1, где входная координата – приращение входного напряжения Δuк, а выходная – соответствующее ему приращение скорости Δv. Рассмотрим поэтапно уравнения, связывающие Δuк и Δv.
Преобразование приращения напряжения Δuк в приращение тока Δi можно определить из соотношения
 , (7.1)
, (7.1)
где L и r – индуктивность и активное сопротивление двигателя; е – ЭДС якоря.
Зададим малые приращения координатам i, uк, е относительно исходного равновесного состояния:
i = i0+ Δi; uк0= uк + Δuк; е=е0+ Δе.
Подставив эти выражения в дифференциальное уравнение (7.1) получим
 .
.
Для исходного состояния равновесия уравнение (7.1) принимает вид:
 . (7.2)
. (7.2)
Вычтя уравнение (7.2) из (7.1), получим дифференциальное уравнение для отклонений
или в операторной форме
(Т1р+ 1)Δi (р) = k1[Δuк(p) – Δе(p)],
где Т1=L/r; k1 = 1/r.
Из уравнения видно, что передаточная функция, связывающая входную Δuк(р) – Δе(р) и выходную Δi(р) координаты соответствует инерционному звену 1-го порядка
 .
.
Преобразование приращения тока Δi в приращение силы тяги ΔFк, описывает характеристика Fк(i) (рис. 7.2а). В целом она нелинейна, но при больших токах близка – к линейной. Поэтому для малых отклонений можно пользоваться зависимостью
ΔFк =k2 Δi, (7.3)
где k2 – угловой коэффициент касательной к кривой Fк(i) в рассматриваемой точке: k2= ΔFк′/ Δi′.
 Уравнение (7.3) соответствует линейному усилительному звену с передаточной функцией W2(р)=k2. Преобразование приращения силы тяги ΔFк в приращение скорости Δv описывает уравнение движения поезда, применяемое в тяговых расчетах,
Уравнение (7.3) соответствует линейному усилительному звену с передаточной функцией W2(р)=k2. Преобразование приращения силы тяги ΔFк в приращение скорости Δv описывает уравнение движения поезда, применяемое в тяговых расчетах,
 (7.4)
(7.4)
где zм – количество движущих колёсных пар; Р и Q – вес локомотива и состава; w0 и wi – удельное сопротивление движению поезда соответственно основное и от уклона; γ – приведенный коэффициент инерции вращающихся масс; ξ – коэффициент перевода значений величин из одной системы в другую.
Основное сопротивление движению
w0 =a0 + a1v + a2v2, (7.5)
где a0 , a1, a2 – коэффициенты, зависящие от типа вагонов, входящих в поезд.
Определим отклонения скорости, предполагая, что отклонения ΔFк, Δw0, Δwi малы. Для этого можно воспользоваться формулой полного дифференциала
 . (7.6)
. (7.6)
Найдя частные производные по Fк, w0 и wi на основании уравнения (7.4), получим
 . (7.7)
. (7.7)
Учитывая, что w0 зависит от скорости по уравнению (7.5) определим dw0 как полный дифференциал этого уравнения
dw0= (а1dv + 2а2v dv) = (а1dv + 2а2v) dv. (7.8)
Заменим в уравнении (7.6)  на
на  и подставим в (7.6) выражение для dw0 из (7.8), тогда
и подставим в (7.6) выражение для dw0 из (7.8), тогда
 . (7.9)
. (7.9)
Перенесем в уравнении (7.9) все члены с dv в левую часть и заменим дифференциалы конечными приращениями
 . (7.10)
. (7.10)
Это же выражение в операторной форме имеет вид
 , (7.11)
, (7.11)
где  . (7.12)
. (7.12)
При расчетах величину v принимают равной скорости выхода на автоматическую характеристику vе.-
Таким образом получим искомую передаточную функцию для преобразования ΔFк → Δv в виде
W′3(p)= к′3/(T3p + 1) (7.13)
и для преобразования Δwi → Δv в виде
W″3(p)= к″3/(T3p + 1). (7.14)
В обоих случаях передаточные функции соответствуют линейному инерционному звену 1-го порядка.
Преобразование приращения тока Δi в приращение магнитного потока ΔФ определяют по магнитной или нагрузочной характеристике Ф(i), которая представлена на рис. 7.2б. Линеаризовав её а области рассматриваемых токов i = i0 ± Δi, получим для малых отклонений
ΔФ = к4Δi, (7.15)
где где ) вид одной системы в другую к4= ΔФ′ /Δi′ – угловой коэффициент касательной к кривой намагничивания в точке А.
Уравнение (7.15) соответствует усилительному звену с передаточной функцией W4(p)= к4
Преобразование приращения магнитного потока ΔФ и приращения скорости движения поезда Δv в приращение ЭДС двигателя Δе осуществляется в соответствии с известным уравнением
е=сеФv,
где  – постоянная машины; μ – передаточное отношение тяговой передачи; р, а – соответственно количество пар полюсов и пар параллельных ветвёй обмотки якоря; N – количество проводников обмотки якоря; D – диаметр колеса.
– постоянная машины; μ – передаточное отношение тяговой передачи; р, а – соответственно количество пар полюсов и пар параллельных ветвёй обмотки якоря; N – количество проводников обмотки якоря; D – диаметр колеса.
Найдём влияние малых отклонений магнитного потока и скорости на величину ЭДС, определив полный дифференциал (7.14)
dе = ce(Фdv + vdФ).
Заменив дифференциал конечными приращениями, запишем
Δе = ce(ФΔv + vΔФ)
или в операторной форме
Δе(р)=W′(p)Δv(p)+W″(p)ΔФ(p),
где W′(p) = к′5= сеФ; W″(p)= к″5=сеv.
В этих выражениях в качестве Ф следует принимать Ф0 (см. рис. 7.2б), а v, как и в уравнении (7.12), считать равным vе. Полученные выражения составляют полную систему уравнений в малых отклонениях для регулирования тягового двигателя последовательного возбуждения в двигательном режиме на постоянство скорости с помощью регулятора напряжения:
 Δi(p)=W1(p)[Δu(p) – Δе(р)
Δi(p)=W1(p)[Δu(p) – Δе(р)
ΔFк(p)=W2(p)Δi(p)
Δv(p)=W′3(p) ΔFк(p) – W″3(p) Δwi(р) (7.16)
ΔФ(p)=W4(p)Δi(p)
Δе(р)=W′5(p)Δv(p)+W″5(p)ΔФ(p)
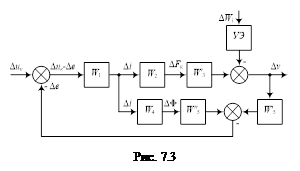
Структурная схема тягового двигателя (рис. 7.3), построенная в соответствии с системой уравнений (7.16) согласно принятой в теории автоматического управления символикой условного изображения элементов, оказалась замкнутой, что подчеркивает способность двигателя к саморегулированию. Если систему уравнений (7.16) методом подстановки свести к одному уравнению, связывающему изменение выходной координаты vе с изменением входной Δuк, то можно получить эквивалентную передаточную функцию для тягового двигателя при рассматриваемом способе регулирования
 . (7.17)
. (7.17)
Передаточную функцию Wa1(p) можно было бы найти, выполнив преобразование структурной схемы рис. 7.3.
Подставив в уравнение (7.17) значение Wi(p) из cоответcтвующих уравнений получим выражение
 , (7.18)
, (7.18)
которое можно привести к виду
 ,
,
где кэ1 = к1к2к′3 /(к1к2к′3к′5+к1к4к″5+1); (Т′э1)2=Т1Т3 /(к1к2к′3к′5+к1к4к′5+1); Т″э1=[Т1 +Т3(1+к1к4к″5)]/ /(к1к2к′3к′5+к1к4к′5+1).
Таким образом, двигатель можно рассматривать как инерционное звено 2-го порядка. Решение характеристического уравнения
(Т′э1)2р2+Т″э1р+1=0
даёт корни
 .
.
Обычно корни р1, р2 – вещественные отрицательные, соответствующие, апериодическому звену 2-го порядка. Лишь для двигателей малой мощности Т″э1<2Т′э1 и корни р1, р2 могут быть комплексными, сопряжёнными, т.е. звено будет колебательным.
Уравнение (7.18) можно записать в виде эквивалентной передаточной функции двигателя при регулировании скорости изменением uк:
 ,
,
где к′э1=кэ1 Т′э2 Т″э2.
 Стабилизация тока i регулятором напряжении uк. Если пренебречь изменением скорости поезда v, что справедливо для быстропротекающих процессов регулирования тока, то в этом случае можно принять обобщенную структурную схему рис. 7.4а.
Стабилизация тока i регулятором напряжении uк. Если пренебречь изменением скорости поезда v, что справедливо для быстропротекающих процессов регулирования тока, то в этом случае можно принять обобщенную структурную схему рис. 7.4а.
При этом двигателю соответствуют звенья W1(p), W4(p) и W″5(p) структурной схемы рис. 7.3. Для рассматриваемого случая эти звенья объединены в структурную схему, приведённую на рис. 7.4б.
Передаточная функция двигателя
 , (7.19)
, (7.19)
где кэ2 = к1(1+ к1к4к″5); Тэ2=Т1/(1+ к1к4к″5).
Двигатель можно при этом рассматривать как инерционное звено 1-го порядка.
 Стабилизация скорости v регулятором ослабления возбуждении. В этом случае uк остается постоянным, а скорость v стабилизируется изменением времени τ, в течение которого рабочие вентили тиристорного преобразовате-ля остаются открытыми. При этом коэффициент ослабле-ния поля β(τ) изменяется в пределах от 1 до наимень-шего допустимого значения.
Стабилизация скорости v регулятором ослабления возбуждении. В этом случае uк остается постоянным, а скорость v стабилизируется изменением времени τ, в течение которого рабочие вентили тиристорного преобразовате-ля остаются открытыми. При этом коэффициент ослабле-ния поля β(τ) изменяется в пределах от 1 до наимень-шего допустимого значения.
Входной координа-той будет приращение β‚ а выходной – приращение v (рис. 7.5б и в). В отличие от схемы 7.3 здесь осущест-вляется преобразование Δiв(Δβ), соответствующее передаточной функции Wв(p). Ему отвечает зависимость iв = βi, полный дифференциал которой
diв= βdi+idβ
или в конечных приращениях относительно исходных значений i0 и β0
Δiв = Δβ i0 + Δi β0. (7.20)
В операторной форме
Δiв(р) = W′6(p)Δβ(р) + W″6(p)Δi(p),
где из начальных условий
W′6(p)= к′7= i0; W″6(p)= к′6= β0.
При регулировании тока возбуждения необходимо учитывать зависимость силы тяги Fк не только от тока i, но и от магнитного потока
Fк ≈смФi, (7.21)
где см= 0,367се.
В соответствии с уравнениями (7.20) и (7.21) приращение силы тяги
 ,
,
где  .
.
Величины i и Ф принимают равными i0 и Ф0 (см. рис. 7.2б).
Структурная схема для рассматриваемого случая (рис. 7.5в) позволяет записать эквивалентное преобразование входной координаты в выходную, которое соответствует инерционному звену 2 порядка.

Структурные схемы любой сложности можно привести к одноконтурной схеме (рис. 7.6а) с главной обратной связью (ГОС). Для оценки динамических свойств САР необходимо знать передаточные функции разомкнутой Wр(р) и замкнутой Wэ(р) системы, переда точные функции замкнутой системы по ошибке WΔ(р) и по возмущению Wq(р).
Передаточная функция замкнутой САР в разомкнутом состоянии выражается отношением преобразования Лапласа регулируемой величины у(р) к преобразованию Лапласа сигнала ошибки (рассогласования) Δ(р):
W(p)= у(р)/Δ(р).
Такая формулировка соответствует тому, что при размыкании цепи ГОС у сумматора входной координатой САР будет ошибка Δ. Передаточная функция Wр(р) может быть вычислена по структурной схеме. При этом считается, что возмущение q=0, а САР после размыкания цепи ГОС состоит только из последовательно соединенных звеньев, поэтому
 ,
,
где Wi(p)=М1(р)/Ni(р) – передаточная функция каждого последовательного звена, которую можно представить отношением двух полиномов.
 Таким образом,
Таким образом,
 , (7.22)
, (7.22)
где  – полином числителя передаточной функции разомкнутой САР:
– полином числителя передаточной функции разомкнутой САР:
Е(р) == Ет рт + Ет-1рт-1 + ... + Е1р + Е0;
F(p) – полином знаменателя передаточной функции разомкнутой системы:
F(p)= Fпрn+ Fn-1pn-1 +…+ F1p + F0.
Порядки т и п этих полиномов равны сумме порядков перемножаемых полиномов Мi(р) и Ni(р), при этом для осуществимости системы должно бытъ n>m. Уравнение F(p)=0 является характеристическим для разомкнутой САР.
Передаточную функцию Wр(p) обычно записывают в стандартной форме, когда многочлены числителя и знаменателя имеют свободные члены, равные единице:
 , (7.23)
, (7.23)
где к= Е0/F0 – коэффициент усиления разомкнутой САР; еi=Еi/E0 при i= 0,1, 2, ..., т; fi = Fi /F0 при i=0, 1, 2 ..., п.
Величина v в уравнении (7.23) соответствует количеству интегрирующих звеньев, включённых последовательно. Её называют порядком астатизма системы. При v=0 система cтатичеcкая, при v=1 – астатическая 1-го порядка‚ при v=2 – астатическая 2-го порядка и т.д.
Если звенья системы типовые, то передаточная функция (7.21) примет вид
 ,
,
где α – количество звеньев интегродифферецирующего и дифференцирующего типов; β-α – количество инерционных звеньев 1–го порядка; γ – количество колебательных звеньев.
Передаточная функция замкнутой системы – это отношение преобразования Лапласа регулируемой величины к преобразованию Лапласа задающего воздействия
Wз(p)=у(р)/g(р). (7.24)
При этом, считая q=0, структурную схему рис. 7.6а можно привести к показанной на рис. 7.6б, т.е. замкнутую САР можно рассматривать как разомкнутую, охваченную главной обратной связью. Тогда передаточная функция замкнутой САР
 или согласно (7.22)
или согласно (7.22)  , (7.25)
, (7.25)
где D(р)=F(p)+Е(р) – полином знаменателя передаточной функции замкнутой системы, причем  .
.
| Степень р | Коэффициенты Di |
| i=0 | D0=E0+F0 |
| i=1 | D1=E1+F1 |
| ………. | ………. |
| ………. | ………. |
| i=m | Dm=Em+Fm |
| i=m+1 | Dm+1=0+F m+1 |
| ………. | ………. |
| ………. | ………. |
| i=n – 1 | Dn-1=0+Fn-1 |
| i= n | Dw=0+Fn |
Порядок полинома D(р) равен п – порядку старшего полинома F(p). Если предположить, что в уравнении (7.25) р = 0, то
кз= к/(1+ к),
где к – коэффициент усиления замкнутой САР.
Передаточная функция замкнутой САР по ошибке – это отношение преобразований Лапласа ошибки и задающего воздействия
WΔ(p)=Δ(р)/g(р). (7.26)
При q=0 структурную схему рис. 7.6а можно привести к виду рис 7.6в. Передаточная функция WΔ(p) может быть выражена через передаточную функцию разомкнутой САР
 . (7.27)
. (7.27)
Подставляя в уравнение 7.27 значение Wр(p) из уравнения 7.21, получим
 .
.
Это уравнение можно разложить в ряд Тейлора по возрастающим степеням р
 .
.
Такой ряд сходится при р → 0, т.е. при t→∞, что соответствует уcтановившемуся процессу. Величины Сi, называют коэффициентами ошибок. Их можно определить по общему правилу разложения функции в ряд Тейлора:
C0=[WΔ(p)]p=0;  .
.
Так как передаточная функция по ошибке является дробнорациональной, то коэффициенты ошибок можно получить проще, разделив полином числителя на полином знаменателя и сравнив полученный ряд выражением
С(р) = F(р)/D(р).
Для определения коэффициента ошибок умножим правую и левую части тождества на полином D(р) и, приравняв коэффициенты в левой и правой частях при одинаковых степенях р, получим
F(р) = С(р)D(р)
или Fпрn+ Fn-1pn-1 +…+ F1p + F0= =
| Степень р | Значения коэффициентов |
| i=0 | F0= С0D0 |
| i=1 | F1= С1D0+ С0D1 |
|
i=2 |
|
| …….. | …….. |
| …….. | …….. |
| i=п |
|

Из системы уравнений коэффициентов Fi можно найти выражения для коэффициентов Сi полинома С(р)

Отсюда следует формула для i-того члена
 .
.
Таким образом, коэффициенты ошибок выражаются через коэффициенты полиномов F(р) и Е(р), т. е. через физические параметры звеньев системы. На основе выражения (7.24) можно записать уравнение для ошибки


или в области времени
 (7.28)
(7.28)
Из уравнения (7.28) видно, что при заданном g(t) ошибка Δ(t) будет равна нулю, только если все Сi = 0. На практике можно получить системы, у которых равны нулю только отдельные коэффициенты ошибок.
Передаточную функцию замкнутой системы по ошибке можно получить и относительно возмущающего воздействия WΔq(p)=Δ(р)/q(р).
Передаточная функция замкнутой системы по возмущению – это соотношение преобразований Лапласа регулируемой величины и возмущения
Wq(p)=у(р)/q(р). (7.29)
При этом структурную схему рис. 7.6а можно привести к виду 7.6г. Передаточную функцию определяют по уравнению (7.29) для заданного возмущения, не учитывая все другие возмущения и задающее воздействие. Знак ГОС на схеме рис. 7.6г учтён введением дополнительного звена с передаточной функцией
Wn+1(p)= – 1. По рис. 7.6г звено с передаточной функцией Wn(p) находится в цепи прямой связи относительно возмущения q(р), а звенья W1(p)), W2(p), ..., Wn+1(p) – в цепи обратной связи и поэтому
 .
.
Перенесем точку разветвления с выхода звена Wп(p) на его вход, введя это звено в цепь обратной связи. В этой цепи Оказываются теперь все п звеньев, поэтому передаточная функция цепи обратной связи совпадает с передаточной функцией разомкнутой системы Wр(p). Учтём дополнительное звено с передаточной функцией Wn+1(p)= – 1, изменив знак в элементе сравнения с плюса на минус (рис. 7.6д). Первую часть этой схемы, содержащую цепь обратной связи, можно заменить эквивалентным звеном с передаточной функцией [1+ W (p)]-1. Вторая часть Wп(p) схемы рис. 7.6д представляет собой передаточную функцию разомкнутой САР по возмущающему воздействию Wqр(p), так как она в соответствии с рис. 7.6а определяет связь между выходной координатой системы у и возмущением q при разомкнутой цепи главной обратной связи. Поменяв местами звенья Wqр(p) и [1+ W (p)]-1] получим схему, приведённую на рис. 7.6д.
Таким образом, для нахождения передаточной функции САР по некоторому возмущению qi, приложенному в любой точке системы, следует найти передаточную функцию разомкнутой системы по этому возмущению Wqiр(p) и разделить ее на передаточную функцию разомкнутой системы Wр(p), увеличенную на единицу
 .
.
Рассмотрим способ определения реакции САР – функции у(р) по известным передаточным функциям Wз(p) и Wqi(p). Из соотношения (7.24) следует, что при отсутствии возмущающих воздействий у(р)= Wз(p)g(р). При отсутствии задающего воздействия реакция САР на данное возмущающее воздействие определяется из уравнения. (7.29) как у(р) = Wqi(p)qi(р).
Так как система линейна, то при наличии управляющего и возмущающего воздействий, пользуясь принципом наложения, получим
 . (7.30)
. (7.30)
Подставим в это уравнение вместо передаточных функций Wз(p) и Wqi(p) их выражения:

или
 , (7.31)
, (7.31)
где Qi(р) – полином числителя cоответствующей передаточной функции Wз(p).
Перейдя от изображений к оригиналам, можно получить дифференциальное уравнение системы.
На основе выражения (7.31) представляется возможным определить общее уравнение САР относительно ошибки. Действительно,
Введя у =g-Δ, получим
 .
.
Перенеся g(р) в правую часть и изменив знаки, получим
 ,
,
откуда
 ,
,
где WΔqi(p) – передаточная функция замкнутой системы по ошибке относительно i-того возмущения: WΔqi(p) = – Wqi(p).
Уравнения САР относительно ошибки будут в дальнейшем использованы при расчете процессов регулирования в линейных системах.

Структурные схемы САР разрабатываются по функциональным схемам на основе детального анализа преобразования сигналов каждым функциональным элементом. При составлении структурных схем линеаризованных САР ЭПС можно использовать структурные схемы и эквивалентные передаточные функции объекта регулирования ОР ( двигателя) как линеаризованного звена, полученные ранее. Кроме того, необходимо выполнять линеаризацию и всех остальных элементов функциональной схемы – управляющего УЭ, исполнительного ИЭ и чувствительного ЧЭ.
Обычно УЭ преобразует рассогласование Δ в сигналы угла управления выпрямителя α, частоты f или длительности импульсов τ; т.е. управляет работой тиристорного ИЭ. Элемент УЭ выполняют на базе электронных устройств и его можно рассматривать как безынерционное звено с передаточной функцией
W1(p)= к1,
где к1 – коэффициент усиления, равный отношению приращения выходного сигнала Δα, Δ f, или Δτ к приращению входного Δи.
Тиристорный исполнителъный элемент также можно считать безынерционным. Для тиристорного преобразователя, регулирующего ослабление возбуждения двигателя, передаточная функция W2(p) аналогична передаточной функции УЭ:
W2(p)= к2,
где к2 – коэффициент усиления: отношение приращения коэффициента ослабления возбуждения Δβ к приращению входного сигнала Δτ.
Для тиристорных преобразователей, регулирующих напряжение на зажимах двигателя ик или напряжение ив при независимом возбуждении тяговых двигателей, изменение соответствующей выходной координаты определяется не только изменением входной, но и возможным изменением напряжения источника питания – контактной сети. Поэтому структурную схему и передаточные функции этих элементов можно определить на основе соответствующих уравнений.
При фазовом регулировании выпрямленное напряжение иd = 0,5кcхи2(1+cosα). Здесь кcх – коэффициент схемы. Определим отклонения иd, вызванные малыми отклонениями и2 и α от начальных значений и20 и α0 с помощью формулы полного дифференциала
 , (7.32)
, (7.32)
где  .
.
 Подставляя эти выражения в уравнение (7.32) и заменяя бесконечно малые отклонения конечными, получим
Подставляя эти выражения в уравнение (7.32) и заменяя бесконечно малые отклонения конечными, получим
 , (7.33)
, (7.33)
где W′2=к′2= –0,5ксхи20sinα0 (p) и W″2=к″2= –0,5ксх(1+cosα0) (p).
Уравнению (7.33) соответствует структурная схема рис. 7.7.
Для импульсных тиристорных преобразователей при частотном и широтном регулировании напряжение на зажимах двигателя ик =исτf.
Зависимость Δик от Δис и Δf определенная на основе формулы полного дифференциала, при частотном регулировании выражается уравнением

где W′2(p)=к′2= ис0τ0 и W″2(p)=к″2=f0 τ0.
При широтном регулировании

где W′2(p)=к′2= ис0f0 и W″2(p)=к″2=f0 τ0.
Структурные схемы таких исполнительных элементов аналогичны схеме, приведенной на рис. 7.7.
Чувствительные элементы, как и управляющие, можно представить усилительным звеном с передаточной функцией ЧЭ WЧЭ(p)=кЧЭ, которая численно равна изменению выходного сигнала (напряжения и2 при единичном изменении входного сигнала – тока или скорости движения.
 Составим для примера структурную схему и определим передаточные функции одноконтурной системы стабилизации тока i двигателя последовательного возбуждения регулированием напряжения ик. Структурная схема этой САР (рис. 7.8а) соответствует функциональной, приведённой на рис. 7.4 при работе канала регулирования напряжения с управляющим элементом УЭ1 и исполнительным ИЭ1. На структурной схеме ИЭ представлен в виде двух звеньев W′2(p) и W″2(p) применительно к импульсному тиристорному преобразователю, а объект регулирования ОР (см. рис. 7.4б) – тремя звеньями W3(p), W4(p) и W5(p), преобразующим ик(р) в Δi(р)*; чувствительному элементу соответствуёт звено W6(p). [*Передаточной функции W3(р) на рис. (7.4б) соответствует передаточная функция ‚ W1(р) = к1/(1+ Т1p), а функции W′5(p) соответствует W″5(p)=Сv0.]
Составим для примера структурную схему и определим передаточные функции одноконтурной системы стабилизации тока i двигателя последовательного возбуждения регулированием напряжения ик. Структурная схема этой САР (рис. 7.8а) соответствует функциональной, приведённой на рис. 7.4 при работе канала регулирования напряжения с управляющим элементом УЭ1 и исполнительным ИЭ1. На структурной схеме ИЭ представлен в виде двух звеньев W′2(p) и W″2(p) применительно к импульсному тиристорному преобразователю, а объект регулирования ОР (см. рис. 7.4б) – тремя звеньями W3(p), W4(p) и W5(p), преобразующим ик(р) в Δi(р)*; чувствительному элементу соответствуёт звено W6(p). [*Передаточной функции W3(р) на рис. (7.4б) соответствует передаточная функция ‚ W1(р) = к1/(1+ Т1p), а функции W′5(p) соответствует W″5(p)=Сv0.]
Преобразуем эту структурную схему, перенеся точку разветвления со входа звена W6(p) на его выход (рис. 7.8б) и заменив звенья, соответствующие ОР, эквивалентным звеном с передаточной функцией тягового двигателя Wэ2(p), которая определяется выражением (7.19). По схеме рис. 7.8б найдём передаточные функции системы регулирования, приняв вначале за выходную координату сигнал Δи2. Передаточную функцию разомкнутой САР получим, разомкнув ГОС у первого элемента сравнения
 ,
,
где к = к1к′2кэ2к6 – коэффициент усиления разомкнутой САР.
Эта передаточная функция соответствует инерционному звену 1-го порядка.
Передаточную функцию замкнутой САР по рис. 7.8б найдём с учётом влияния отрицательной обратной связи
 ,
,
где кз= к /(1 + к) и Тз= Тэ2 /(1+ к), что также соответствует инерционному звену 1-го порядка.
Передаточная функция замкнутой САР по ошибке

где кΔ= 1/(1 + к).
Передаточная функция замкнутой САР по возмущению
 ,
,
где кq=к″2кэ2к6(1+к).
Общее уравнение системы в соответствии с уравнением (7.30) представляется в виде
 .
.
Переходя от координаты Δи2(р)к Δi(р),
 .
.
Ошибка в рассматриваемой САР в соответствии с уравнением (7.31) определится как
 ;
;
 .
.
Структурные схемы, передаточные функции, уравнение системы, уравнение ошибки можно получить и для других вариантов САР ЭПС так же, как и в рассмотренном случае.
Введение положительной обратной связи по ЭДС в контур стабилизации тока. Напряжение ик на зажимах двигателя на 80…90 % уравновешивается его ЭДС, поэтому в системах автоматического управления промышленным электроприводом часто вводят положительную обратную связь по ЭДС (рис. 5.9). Здесь изменение управляющего сигнала Δиз соответствует не более чем 20 % изменения Δик, так как весь остальной диапазон изменения этого напряжения определяется сигналом Δи4, пропорциональным ЭДС.
Такие САР обладают лучшими динамическими свойствами, так как регулятор W1(p) может быстрее «отработать» возникшее рассогласование. Недостатком этих САР является необходимость введения дополнительного функционального элемента W8(p), выполняющего вычисление ЭДС, поскольку измерить ее на работающем тяговом двигателе не представляется возможным. Дополнительная обратная связь по ЭДС впервые была введена на электровозе однофазно-постоянного тока ВЛ80Р -1669, оборудованном по схеме Новосибирского научно-исследовательского центра завода «Сибстанкоэлектропривод».
Введение в закон регулирования производных. Как отмечалось ранее, введение производных в закон регулирования позволяет выявить тенденции в изменении величины Δ и за счет этого получить более качественные системы регулирования. В этом случае структурная схема САР изменяется, так как параллельно с интегрирующим звеном W1(p)= 1/(Тир) (см. рис. 7.8) необходимо включить дифференцирующее звено W8(p)= Тир (рис. 7.10а). В этом случае передаточная функция регулятора Р будет определяться выражением:
 .
.
Иногда вместо производной от рассогласования в САР вводят производную регулируемой величины. В этом случае структурная схема принимает вид, показанный на рис. 7.10б, а закон регулирования определяется выражением
 .
.
Аналогичным образом в законы регулирования могут быть введены производные более высоких порядков. С этой целью параллельно звену W8(p) необходимо включить дополнительные звенья, выполняющие выделение производных второго, третьего и т. д. порядков. Однако на практике обычно ограничиваются введением производной первого порядка, так как с увеличением порядка производной, как правило, увеличивается влияние высокочастотных помех.
При учете реальных нелинейных характеристик функциональных элементов составление структурных схем не облегчает получения уравнений переходных процессов. Поэтому обычно ограничиваются описанием работы САР с помощью систем нелинейных дифференциальных уравнений. Используя уравнения, полученные ранее при описании объекта регулирования и исполнительного элемента, составим такие системы уравнений для ряда САР ЭПС.
Система автоматической стабилизации тока возбуждения. Системы автоматической стабилизации тока возбуждения применяют на электровозах ВЛ85 в режиме рекуперативного торможения, а так же на электровозах ВЛ80Т и ВЛ80С в канале стабилизации тока возбуждения при реостатном торможении. Кроме того, такие САР применяют в режимах тяги и электрического торможения на электровозах с независимым и смешанным возбуждением тяговых двигателей.
Будем считать, что в этой системе так же, как и в САР стабилизации тока ЭПС, рассмотренной ранее, используется регулятор, работа которого описывается уравнениями:

 x1 при Δи>δ;
x1 при Δи>δ;
x= 0 при –δ ≤ Δи ≤ δ; 7.34)
–x1 при Δи<–δ.
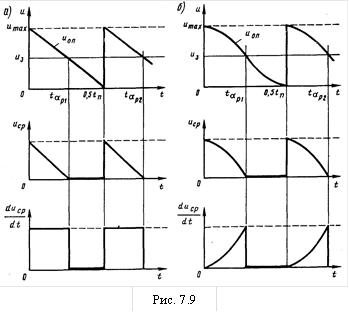
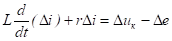
Преобразование этого сигнала в импульсы управления происходит при сравнении сигнала из с опорным напряжением иоп, которое в течение полупериода питающего напряжения 0,5tп=1/(2fc) изменяется либо по линейному, либо по косинусоидальному закону (рис. 7.9):
 .
.
Результат сравнения определяется как разность иср=иоп – из.
Момент времени  формирования импульса управления определяется выполнением условия
формирования импульса управления определяется выполнением условия
иср=0 или из=иоп.
Для линейно изменяющегося напряжения зависимость  имеет вид
имеет вид
 .
.
Управляющий импульс формируют путем дифференцирования напряжения иср. При этом на участке линейного изменения иср(t) производная dиср/dt = const, а затем в момент равенства иоп(t) и из производная dиср/dt = 0. В случае изменения опорного напряжения по закону косинуса время , определяемое равенством иоп(t) и из –
 .
.
Отсюда
 .
.
Процессы, протекающие при питании выпрямительной установкой обмотки возбуждения двигателя при подаче импульсов управления на тиристоры в моменты времени при значениях логических функций G1 и G2, указанных в табл. 6.1,были описаны ранее.
Переход от тока обмотки возбуждения iв к напряжению на выходе чувствительного элемента и и работу элемента сравнения можно описать линейными уравнениями:
и2=k1iв и Δи=k2(и1-и2).
Таким образом, приведённые выше уравнения описывают переходные процессы в замкнутой нелинейной системе автоматической стабилизации. Совместное их решение при изменении задающего сигнала и1 или возмущения етр2 позволяет построить графики изменения регулируемой величины iв или ошибки Δи и оценить качество регулирования.
Аналогично, используя уравнения объектов регулирования и исполнительных элементов, приведенных ранее, можно составить системы уравнений для различных САР ЭПС. Для расчета переходных процессов в САР на ЭВМ по уравнениям системы регулирования известными методами составляют программу работы вычислительной машины.
Система автоматического регулирования угла запаса выпрямительно-инверторного преобразователя. Составим уравнения, описывающие переходные процессы в системе автоматического регулирования угла запаса на основе функциональных схем, приведенных на рис. 6.35. Обе эти схемы содержат датчик угла коммутации γ, является датчик угла коммутации (рис. 4.10), который содержит трансформатор переменного тока ТТ, параллельно вторичной обмотке которого подключены дроссель насыщения ДН и выпрямитель В. Дроссель ДН находится в состоянии насыщения практически при любом токе. В течение угла коммутации γ, который показан на кривой выходного напряжения инвертора и2 происходит перемагничивание дросселя током iL. В остальную часть каждого полупериода ток дросселя остается неизменным и, следовательно, напряжение uL на его обмотке равно нулю. Таким образом, длительность импульса напряжения на выходе датчика соответствует углу γ, а его амплитуда зависит от скорости изменения тока в обмотке дросселя. Если на выходе датчика включить стабилитрон VD, который ограничит амплитуду на постоянном уровне, то и среднее значение выходного напряжения будет пропорционально углу γ.
 – ЧЭγ (см. рис. 7.10), входным сигналом для которого является ток трансформатора i, вычисляемый на осно-ве решения уравнений (6.7). Работа ЧЭ может быть описана следующими соотношениями:
– ЧЭγ (см. рис. 7.10), входным сигналом для которого является ток трансформатора i, вычисляемый на осно-ве решения уравнений (6.7). Работа ЧЭ может быть описана следующими соотношениями:
 .
.
Вычитая uоп из uL отсекают малые колебания и вызванные пульсациями тока iтр. В результате этого сигнал и0 представляет собой практически прямоугольный импульс, длительность которого t2–tβ соответствует времени коммутации, а моменты времени tβ и t2 – соответственно моментам начала и окончания коммутации. При этом амплитуда импульса и0 практически постоянна. В результате интегрирования определяется напряжение и(γ), пропорциональное длительности периода коммутации t2–tβ.
Аналогичным образом определяется сигнал и(δ) на выходе датчика угла запаса ЧЭδ. В качестве такого датчика используют обычный триггер, который запускается в момент времени t2, соответствующего моменту окончания коммутации. Сброс этого триггера производится синхроимпульсом от устройства синхронизации в момент перехода кривой питающего напряжения через нуль, т.е. через каждый полупериод 1/(2fc). На выходе триггера появляется прямоугольный импульс, длительность которого пропорциональна углу запаса, а амплитуда и0 такая же, как и амплитуда импульса у датчика ЧЭγ. Преобразование этого импульса в напряжение и(δ), пропорциональное углу δ, можно описать с помощью интегрирования
 .
.
Напряжение и(π) получают аналогичным образом, интегрируя сигнал и0 на протяжении всего полупериода:
 .
.
Затем напряжения складываются:
 .
.
Формирование импульса управления в момент времени tβ про исходит при сравнении напряжения и(αβ) с опорным напряжением. При этом результат сравнения принимает вид:
 .
.
Здесь индекс п–1 означает результат измерения в предыдущий полупериод, а индекс п относится к моменту формирования управляющего импульса в следующий полупериод.
Следует иметь в виду, что в соответствии с функциональной схемой, приведенной на рис. 6.35а, напряжение и(γ) преобразуется по закону регулирования регулятора Рγ. В отличие от этого схема на рис. 6.35б предполагает преобразование регулятором сигнала и(δз) – и(δ).
Импульсы управления тиристорами, формируемые в моменты tβn так же, как и в моменты  , определяют проводящее состояние вентилей, при котором возникают переходные процессы в силовой цепи электровоза, описываемые уравнениями (6.7).
, определяют проводящее состояние вентилей, при котором возникают переходные процессы в силовой цепи электровоза, описываемые уравнениями (6.7).
Уравнение контура регулирования скорости ЭПС с тиристорным управлением. Рассмотрим уравнения контура регулирования скорости для ЭПС с тиристорными преобразователями. При использовании тиристорных преобразователей САР скорости движения могут быть реализованы на ЭПС с тяговыми двигателями как последовательного, так и не зависимого возбуждения. Во втором случае такая САР содержит дополнительный контур регулирования возбуждения. Рассмотрим подробнее уравнения САР скорости движения для этого случая, поскольку эти же уравнения без учета контура регулирования возбуждения могут быть использованы и для описания САР с двигателями последовательного возбуждения.
В соответствии с ранее сделанными допущениями контуры регулирования токов якоря и возбуждения заменим апериодическими звеньями 1-го порядка с уравнением
 .
.
При l=1 контур регулирования тока якоря имеет параметры: k1=1 и Т1=0,1 с, а при l=2 – контур регулирования тока возбуждения с параметры k2=1 и Т2=0,2 с.
Сила тяги электровоза определяется соотношением Fк=смФiя, а связь силы тяги со скоростью движения –уравнением
 . (7.35)
. (7.35)
В уравнении (7.35) учитываются три составляющие сопротивления: движению поезда от уклона Wi, основное для электровоза Wоэ и грузовых вагонов Wов:
W= Wi+ Wоэ+ Wов.
При этом
Wоэ= aоэ+ a1эv+ a2эv2 и Wов= aов+ a1вv+ a2вv2.
Коэффициенты аi в этих уравнениях определяются правилами проведения тяговых расчетов.
Уравнение регулятора скорости запишем в виде
 , (7.36)
, (7.36)
 где x1 при Δv>δ;
где x1 при Δv>δ;
x= 0 при – δ <Δv<δ;
–x1 при Δv<–δ,
а  .
.
Таким образом, здесь введена производная dv/dt регулируемого параметра, что уменьшает отклонение фактического значения регулируемой величины от заданной.
Величина х1 зависит от допустимой силы тяги Fк и минимального времени нарастания силы тяги Тт
х1= Fк / Тт. (7.37)
Постоянную времени Тт можно в первом приближении определить по зависимости, обеспечивающей допустимый уровень продольных сил в поезде
 , (7.38)
, (7.38)
где т – масса поезда; kf – коэффициент формы нарастания силы тяги (торможения).
Lопустим, что программный элемент ПрЭ в этой схеме реализует только простейшую форму ограничения по потенциальным условиям. С этой целью ПрЭ вычисляет отношение токов Iвз/ Iяз и сравнивает его с допустимым значением 0,42. При нарушении условия (Iвз/ Iяз)>0,42 на выходе ПрЭ появляется сигнал х2, т.е.
Эта система регулирования в процессе работы перестраивает свою структуру. Так, при трогании и разгоне поезда САР работает как трёхконтурная с контурами регулирования скорости, тока якоря и тока возбуждения. В этом режиме заданное значение тока возбуждения Iвз поддерживается равным максимальному его значению, а заданное значение тока якоря Iяз регулятор скорости увеличивает в соответствии с соотношениями (7.36)…(7.38).
После того, как напряжение и на зажимах тягового двигателя достигнет величины номинального значения ик в работу вступает дополнительный, четвёртый контур регулирования, уменьшающий сигнал, пропорциональный заданному значению тока возбуждения, на величину тока коррекции Iк

Поскольку контур регулирования тока якоря заменён одним эквивалентным звеном, то для определения ик в данной модели приходится по значениям скорости v и магнитного потока Ф вычислять ЭДС двигателя е= сеФv,
 а затем вычитать из ЭДС падение напряжения на якоре двигателя ик=е– iяrя.
а затем вычитать из ЭДС падение напряжения на якоре двигателя ик=е– iяrя.
В действительности на ЭПС напряжение ик определяется по сигналу датчика напряжения и вычисления его по формулам не требуется.
Наконец, при выходе на ограничение по потенциальным условиям в работу включается пятый контур регулирования. Этот контур вводит в РС сигнал х2, уменьшающий заданное значение тока якоря.
Для обеспечения хороших показателей такой системы величина Тд должна изменяться в зависимости от величины Fк и массы поезда (рис. 7.11), где показаны зависимости постоянной времени регулятора скорости от максимальной силы тяги при значениях массы поезда: 1 – 6000 т; 2 – 4000 т; 3 – 1000 т.
Уравнение контура регулирования скорости ЭПС с резисторно-контакторным управлением. Регулятор скорости на ЭПС с резисторно-контакторным управлением осуществляет переключение позиций управления в строго определенном порядке, т.е. на выходе исполнительного регулятора скорости имеются всего два сигнала: «Увеличение номера позиции» и «Уменьшение номера позиции». В простейшем случае эти сигналы формируются непосредственно регулятором скорости поезда. На вход регулятора скорости в определённые моменты времени t=kTц (см. рис. 5.5) поступает сигнал с выхода элемента сравнения Δv[kTц]=vз[kTц] – vизм[kTц], определяющий рассогласование между заданным и измеренным значениями скорости. Учитывая инерционность объекта управления, вычитаем из этой разности сигнал, пропорциональный измеренному значению ускорения поезда:
ΔvΣ[kTц]= Δv[kTц] –кааизм[kTц],
где ка – коэффициент усиления по ускорению.
Этот сигнал преобразуется промежуточным элементом с характеристикой, аналогичной системе (7.34) в сигнал х:
1 при ΔvΣ>δ;
x[kTц]= 0 при ΔvΣ│ ≤ δ;
–1 при ΔvΣ<–δ.
Номер позиции N определяется следующим образом:
Скорость поезда массой mп в режиме тяги определяется с помощью решения дифференциального уравнения движения поезда:
 (7.39)
(7.39)
Сила тяги поезда FN(v) зависит от номера позиции группового переключателя, т.е. от номера ступени управления напряжением Nст и номера ступени управления возбуждением Nсв. Уравнения тяговых характеристик электровоза в зависимости от Nст и Nсв

 (7.40)
(7.40)
где пд – количество тяговых двигателей; Fд – сила тяги одного двигателя; I – ток тягового двигателя; rд– сопротивление обмоток якоря и полюсов двигателя; R(Nсн) – добавочное сопротивление, приведенное к одному двигателю (для электровозов постоянного тока это – сопротивление пусковых реостатов; для электровозов переменного тока – внутреннее сопротивление трансформатора, реакторов и вентилей); U(Nсн) – напряжение на двигателе и сопротивлении R.
Зависимости Ф(I, Nсв) и Fд(I, Nсв) являются постоянными характеристиками тягового двигателя и не зависят от напряжения контактной сети Uкс.
Для электровоза постоянного тока увеличение U достигается уменьшением количества последовательно подсоединяемых к токоприёмнику двигателей
пс(Nсн) – U=Uкс/пс(Nсв). (7.41)
Например, у электровоза ЧС2, имеющего шесть тяговых двигателей, пс может быть равно шести (последовательное соединение), трем (последовательно-параллельное по три двигателя в цепи) и двум (последовательно-параллельное по два двигателя в цепи). При уменьшении пс увеличивается количество цепей параллельно соединенных групп двигателей пп= пд/пс.
У электровозов переменного тока напряжение Uд зависит от коэффициента трансформации тягового траисформатора кт(Nсн)
 , (7.42)
, (7.42)
где Uкс – действующее значение напряжения на токоприемнике; ΔUв – падение напряжения на выпрямительной установке.
Для задания характеристик сеФ (I, Nсв) используется кусочно–линейная аппроксимация этих кривых
сеФ (I, Nсв)=(I–In)кп(Nсв)+ сеФп(Nсв), (7.43)
где In, сеФп(Nсв) – координаты п-ного узла аппроксимации.
При этом
Такое задание кривых намагничивания тягового двигателя позволяет свести нелинейные (относительно тока) уравнения (7.40) к линейным, подобрав соответственно номер интервала аппроксимации.
Напряжение на токоприемнике рассчитывается по формуле
 , (7.44)
, (7.44)
где Uф – напряжение на фидере тяговой подстанции; ΔUс, ΔUр – падение напряжения в контактной сети соответственно от сопутствующих и расчетного поездов.
Последняя величина
ΔUр=Iэzкс, (7.45)
где Iэ – ток электровоза; zкс – полное сопротивление контактной сети и рельсов между электровозом и подстанциями.
При двусторонней схеме питания
 , (7.46)
, (7.46)
где  – координата k-той подстанции; s – координата поезда (
– координата k-той подстанции; s – координата поезда ( )‚ ρ – полное сопротивление 1 км контактной сети и рельсов.
)‚ ρ – полное сопротивление 1 км контактной сети и рельсов.
При моделировании движения электровозов постоянного тока предполагалось Uф= 3,3 кВ, ρ=0,043 Ом/км (два контактных провода МФ-150, несущий трос М-120, рельсы Р65). Ток электровоза
Iэ=Inп,
где I – ток одной параллельной ветви двигателя.
При моделировании движения электровозов переменного тока предполагалось Uф=27,5 кВ, ρ=0,22 Ом/км (контактный провод МФ-100, несущий трос М-95, рельсы Р65). Действующее значение тока электровоза
 .
.
На основании выражений (7.45) и (7.46), зная координату и ток электровоза, легко вычислить значение ΔUр. Сложнее определить падение напряжения от сопутствующих поездов, так как точный расчёт ΔUс требует моделирования всей случайной поездной ситуации в фидерной зоне. С целью упрощения моделирующей программы используется приближенная формула:
 .
.
Коэффициент пропорциональности
 , (7.47)
, (7.47)
где lср– среднее расстояние между подстанциями, км (для постоянного тока lср= 20 км; для переменного lср = 40 км); tч, tн – межпоездные интервалы соответственно для чётного и нечётного направлений, мин.
Объединяя выражения (7.44), (7.45) и (7.47), получим
 . (7.48)
. (7.48)
Основным источником погрешности при таком способе учета падения напряжения от сопутствующих поездов является искусственное завышение перепадов напряжения на токоприемнике расчетного электровоза. В действительности моменты изменения токов расчетного и сопутствующих поездов не совпадают и перепады напряжения несколько сглаживаются. Таким образом, рассмотренная методика предполагает введение более сильного, чем на практике, возмущающего воздействия.
Расчет силы тяги электровоза производится на основании тока тягового двигателя. С учетом выражений (7.39)…(7.43), (7.46), (7.47) и (7.48) этот ток рассчитывается по следующей формуле:
 , (7.49)
, (7.49)
где иэф, rэс – соответственно напряжение фидера тяговой подстанции и сопротивление контактной сети (с учетом влияния сопутствующих поездов), приведенные к одному тяговому двигателю.
Для электровозов постоянного тока
 ,
,
а для электровозов переменного тока
 .
.
При вычислении тока тягового двигателя по выражению (7.49) должно выполняться условие In≤ I≤In+1 в противном случае номер интервала аппроксимации п изменяют до тех пор, пока ток тягового двигателя не попадет на этот интервал. Сила тяги электровоза вычисляется по зависимостям Fд(I, Nсв) с помощью их кусочно линейной аппроксимации, аналогичной выражениям (5.43).
Таким образом, предложенный способ расчета силы тяги электровоза позволяет моделировать его движение на всех, в том числе и неходовых позициях управления.
Если известна методика расчета отдельных составляющих правой части уравнения (7.39), то с помощью численного его интегрирования легко определить скорость и координату поезда в любой момент времени. При моделировании реального переключения позиций управления электровоза целесообразно шаг интегрирования Δtn выбрать равным времени переключения контроллера, составляющего, как правило, десятые доли секунды. При этом для получения приемлемой точности расчетов (не хуже 0,8 км/ч) достаточно использовать метод Эйлера:
Решение всех рассмотренных уравнений при замене номера позиции N соответствующим значением Nсн или Nсв позволяет исследовать переходные процессы изменения скорости движения поезда.
Обратим внимание, что при исследовании динамики этой системы переходными процессами в цепи тяговых двигателей также пренебрегаем. Это связано с тем, что инерционность поезда как минимум на два порядка выше инерционности электрической цепи двигателей.
1. Структурные схемы и передаточные функции тягового электродвигателя как линеаризованного объекта регулирования.
2. Структурные схемы и передаточные функции разомкнутых и замкнутых САР. 3. Структурные схемы и уравнения переходных процессов в САР ЭПС.

Структурные схемы САР составляют обычно по их функциональным схемам. При этом разделение элементов на звенья выполняют так, чтобы каждое звено можно было описать простейшей передаточной функцией, соответствующей одному из типовых звеньев. Задающие элементы на структурных схемах обычно не показывают. Если в структурной схеме, помимо главной обратной связи (ГОС), имеются местные обратные связи, то такие схемы предварительно преобразовывают в соответствии с известными правилами.
Многоконтурные САР ЭПС, у которых во внешнем контуре выполняется регулирование скорости, а во внутреннем – регулирование тока (см. рис. 6.10), имеют особенность, связанную с тем, что постоянные времени этих контуров отличаются примерно на два порядка. Постоянная времени внутреннего контура регулирования тока определяется реактивным (индуктивным) и активным сопротивлениями электрической цепи ЭПС и составляет десятые и даже сотые доли секунды. Постоянная времени внешнего контура регулирования скорости определяется инерционностью поезда и составляет единицы и десятки секунд.
В связи с этим при рассмотрении переходных процессов во внутреннем контуре регулирования тока скорость движения поезда можно считать неизменной и работу внешнего контура не учитывать. Кроме того, при расчётах внешнего контура внутренний может быть заменен одним эквивалентным апериодическим звеном с коэффициентом усиления, равным единице, и постоянной времени, определяемой по графику переходного процесса во внутреннем контуре регулирования.
В отличие от функциональных схем, которые поясняют принцип действия систем автоматического регулирования, структурные схемы дают представление о характере преобразования сигналов в системах как при статических (установившихся), так и при динамических (неустановившихся или переходных) процессах. На основании структурных схем можно выполнить математическое описание процессов, протекающих в системе, и оценить основные свойства систем: устойчивость и качество регулирования; они позволяют графически изобразить взаимодействия элементов в сложных системах, что упрощает исследование таких систем. Структурной называется такая схема, в которой каждой математической операции преобразования сигнала соответствует определенное динамическое звено.
В отличие от элемента функциональной схемы динамическое звено не обязательно должно быть конструктивно обособленным устройством. Такими звеньями могут быть отдельные части элементов и объектов регулирования – обмотки возбуждения или якоря электрических машин, обмотки управления магнитных усилителей и т.п. Иногда могут вводиться динамические звенья, не связанные непосредственно с функциональными элементами, а лишь характеризующие математические зависимости между некоторыми координатами.
Составление уравнений для регулируемой величины и ошибки САР по структурной схеме обычно выполняют для линейных или линеаризованных систем при малых отклонениях от установившегося состояния задающих и возмущающих воздействий. Поэтому такие уравнения нельзя использовать для расчетов всех возможных режимов работы ЭПС. Так, при исследованиях переходных процессов в САР ЭПС, возникающих при трогании поезда, входе в режим электрического торможения, отключении установившегося режима работы и т.п., необходимо учитывать реальные нелинейные характеристики всех функциональных элементов. В этом случае исследование переходных процессов в САР ЭПС выполняют на ЭВМ; структурные схемы не составляют, описывая переходные процессы непосредственно системой нелинейных дифференциальных уравнений.
Если изменение входной координаты звёна х приводит к изменению его выходной координаты у, а изменение у никак не сказывается на величине х, то такое звено называют звеном направленного действия. Свойство направленности обычно возникает при усилении входного сигнала по мощности.
Пассивные звенья (рычаг, зубчатая передача, цепочки R, L, С и др.) свойством направленного действия не обладают.
Процесс преобразования сигналов в любой системе может быть описан с помощью передаточных функций W(р), частотных W(jω) и импульсных k(t)-характеристик. Поэтому считают, что каждому звену соответствуют определенные W(р), W(jω) и k(t). Удобно c не которыми приближениями свести всю совокупность динамических звеньев к ряду типовых, динамические свойства которых, выражаемые с помощью W(р), W(jω) k(t), были изучены в курсе «Теория автоматического управления».
Используя структурную схему системы, можно определить для неё W(р) и k(t), исходя из соответствующих функций отдельных типовых динамических звеньев.
Тяговый двигатель как линеаризованный объект регулирования. В системах регулирования процессов тяги и торможения ЭПС объектом рёгулирования обычно считают тяговый двигатель. Различия в способах возбуждения, режимах работы и выборе координат обусловливают различия в структурных схемах и передаточных функциях двигателя.
Статические характеристики двигателей – зависимости от тока якоря магнитного потока Ф(i), скорости v(i) и силы тяги F(i) – а также характеристика индуктивности L(i) нелинейны. Нелинейность зависимостей обусловлена кривой намагничивания, влиянием вихревых токов и размагничивающим действием реакции якоря.
В первом приближении, рассматривая тяговый двигатель как линеаризованное звено, можно допустить, что отклонения входных величин от установившихся значений малы. В пределах этих малых отклонений регулируемые величины можно заменять отрезками касательных к графикам нелинейных зависимостей в точках, соответствующих установившемуся режиму, описываемых исходными величинами uк0, i0, Fк0 и т. д. Можно также пренебречь и влиянием вихревых токов.
Структурную схему составляют, рассматривая последовательно уравнения, описывающие преобразования величин в двигателе. Например, после преобразования напряжения uк в ток i рассматривают преобразование тока i в силу тяги Fк, а Fк – в скорость v. Для каждого преобразования определяют соответствующую передаточную функцию.
Рассмотрим наиболее характерные структурные схемы для распространенных видов регулирования и условий работы двигателей последовательного возбуждения.
Стабилизация скорости регулированием напряжения uк. В качестве исходной можно принять упрощенную схему рис. 7.1, где входная координата – приращение входного напряжения Δuк, а выходная – соответствующее ему приращение скорости Δv. Рассмотрим поэтапно уравнения, связывающие Δuк и Δv.
Преобразование приращения напряжения Δuк в приращение тока Δi можно определить из соотношения
, (7.1)
где L и r – индуктивность и активное сопротивление двигателя; е – ЭДС якоря.
Зададим малые приращения координатам i, uк, е относительно исходного равновесного состояния:
i = i0+ Δi; uк0= uк + Δuк; е=е0+ Δе.
Подставив эти выражения в дифференциальное уравнение (7.1) получим
 .
.
Для исходного состояния равновесия уравнение (7.1) принимает вид:
. (7.2)
Вычтя уравнение (7.2) из (7.1), получим дифференциальное уравнение для отклонений
или в операторной форме
(Т1р+ 1)Δi (р) = k1[Δuк(p) – Δе(p)],
где Т1=L/r; k1 = 1/r.
Из уравнения видно, что передаточная функция, связывающая входную Δuк(р) – Δе(р) и выходную Δi(р) координаты соответствует инерционному звену 1-го порядка
.
Преобразование приращения тока Δi в приращение силы тяги ΔFк, описывает характеристика Fк(i) (рис. 7.2а). В целом она нелинейна, но при больших токах близка – к линейной. Поэтому для малых отклонений можно пользоваться зависимостью
ΔFк =k2 Δi, (7.3)
где k2 – угловой коэффициент касательной к кривой Fк(i) в рассматриваемой точке: k2= ΔFк′/ Δi′.
Уравнение (7.3) соответствует линейному усилительному звену с передаточной функцией W2(р)=k2. Преобразование приращения силы тяги ΔFк в приращение скорости Δv описывает уравнение движения поезда, применяемое в тяговых расчетах,
(7.4)
где zм – количество движущих колёсных пар; Р и Q – вес локомотива и состава; w0 и wi – удельное сопротивление движению поезда соответственно основное и от уклона; γ – приведенный коэффициент инерции вращающихся масс; ξ – коэффициент перевода значений величин из одной системы в другую.
Основное сопротивление движению
w0 =a0 + a1v + a2v2, (7.5)
где a0 , a1, a2 – коэффициенты, зависящие от типа вагонов, входящих в поезд.
Определим отклонения скорости, предполагая, что отклонения ΔFк, Δw0, Δwi малы. Для этого можно воспользоваться формулой полного дифференциала
. (7.6)
Найдя частные производные по Fк, w0 и wi на основании уравнения (7.4), получим
. (7.7)
Учитывая, что w0 зависит от скорости по уравнению (7.5) определим dw0 как полный дифференциал этого уравнения
dw0= (а1dv + 2а2v dv) = (а1dv + 2а2v) dv. (7.8)
Заменим в уравнении (7.6) на и подставим в (7.6) выражение для dw0 из (7.8), тогда
. (7.9)
Перенесем в уравнении (7.9) все члены с dv в левую часть и заменим дифференциалы конечными приращениями
. (7.10)
Это же выражение в операторной форме имеет вид
, (7.11)
где . (7.12)
При расчетах величину v принимают равной скорости выхода на автоматическую характеристику vе.-
Таким образом получим искомую передаточную функцию для преобразования ΔFк → Δv в виде
W′3(p)= к′3/(T3p + 1) (7.13)
и для преобразования Δwi → Δv в виде
W″3(p)= к″3/(T3p + 1). (7.14)
В обоих случаях передаточные функции соответствуют линейному инерционному звену 1-го порядка.
Преобразование приращения тока Δi в приращение магнитного потока ΔФ определяют по магнитной или нагрузочной характеристике Ф(i), которая представлена на рис. 7.2б. Линеаризовав её а области рассматриваемых токов i = i0 ± Δi, получим для малых отклонений
ΔФ = к4Δi, (7.15)
где где ) вид одной системы в другую к4= ΔФ′ /Δi′ – угловой коэффициент касательной к кривой намагничивания в точке А.
Уравнение (7.15) соответствует усилительному звену с передаточной функцией W4(p)= к4
Преобразование приращения магнитного потока ΔФ и приращения скорости движения поезда Δv в приращение ЭДС двигателя Δе осуществляется в соответствии с известным уравнением
е=сеФv,
где – постоянная машины; μ – передаточное отношение тяговой передачи; р, а – соответственно количество пар полюсов и пар параллельных ветвёй обмотки якоря; N – количество проводников обмотки якоря; D – диаметр колеса.
Найдём влияние малых отклонений магнитного потока и скорости на величину ЭДС, определив полный дифференциал (7.14)
dе = ce(Фdv + vdФ).
Заменив дифференциал конечными приращениями, запишем
Δе = ce(ФΔv + vΔФ)
или в операторной форме
Δе(р)=W′(p)Δv(p)+W″(p)ΔФ(p),
где W′(p) = к′5= сеФ; W″(p)= к″5=сеv.
В этих выражениях в качестве Ф следует принимать Ф0 (см. рис. 7.2б), а v, как и в уравнении (7.12), считать равным vе. Полученные выражения составляют полную систему уравнений в малых отклонениях для регулирования тягового двигателя последовательного возбуждения в двигательном режиме на постоянство скорости с помощью регулятора напряжения:
Δi(p)=W1(p)[Δu(p) – Δе(р)
ΔFк(p)=W2(p)Δi(p)
Δv(p)=W′3(p) ΔFк(p) – W″3(p) Δwi(р) (7.16)
ΔФ(p)=W4(p)Δi(p)
Δе(р)=W′5(p)Δv(p)+W″5(p)ΔФ(p)
Структурная схема тягового двигателя (рис. 7.3), построенная в соответствии с системой уравнений (7.16) согласно принятой в теории автоматического управления символикой условного изображения элементов, оказалась замкнутой, что подчеркивает способность двигателя к саморегулированию. Если систему уравнений (7.16) методом подстановки свести к одному уравнению, связывающему изменение выходной координаты vе с изменением входной Δuк, то можно получить эквивалентную передаточную функцию для тягового двигателя при рассматриваемом способе регулирования
. (7.17)
Передаточную функцию Wa1(p) можно было бы найти, выполнив преобразование структурной схемы рис. 7.3.
Подставив в уравнение (7.17) значение Wi(p) из cоответcтвующих уравнений получим выражение
, (7.18)
которое можно привести к виду
,
где кэ1 = к1к2к′3 /(к1к2к′3к′5+к1к4к″5+1); (Т′э1)2=Т1Т3 /(к1к2к′3к′5+к1к4к′5+1); Т″э1=[Т1 +Т3(1+к1к4к″5)]/ /(к1к2к′3к′5+к1к4к′5+1).
Таким образом, двигатель можно рассматривать как инерционное звено 2-го порядка. Решение характеристического уравнения
(Т′э1)2р2+Т″э1р+1=0
даёт корни
.
Обычно корни р1, р2 – вещественные отрицательные, соответствующие, апериодическому звену 2-го порядка. Лишь для двигателей малой мощности Т″э1<2Т′э1 и корни р1, р2 могут быть комплексными, сопряжёнными, т.е. звено будет колебательным.
Уравнение (7.18) можно записать в виде эквивалентной передаточной функции двигателя при регулировании скорости изменением uк:
,
где к′э1=кэ1 Т′э2 Т″э2.
Стабилизация тока i регулятором напряжении uк. Если пренебречь изменением скорости поезда v, что справедливо для быстропротекающих процессов регулирования тока, то в этом случае можно принять обобщенную структурную схему рис. 7.4а.
При этом двигателю соответствуют звенья W1(p), W4(p) и W″5(p) структурной схемы рис. 7.3. Для рассматриваемого случая эти звенья объединены в структурную схему, приведённую на рис. 7.4б.
Передаточная функция двигателя
, (7.19)
где кэ2 = к1(1+ к1к4к″5); Тэ2=Т1/(1+ к1к4к″5).
Двигатель можно при этом рассматривать как инерционное звено 1-го порядка.
Стабилизация скорости v регулятором ослабления возбуждении. В этом случае uк остается постоянным, а скорость v стабилизируется изменением времени τ, в течение которого рабочие вентили тиристорного преобразовате-ля остаются открытыми. При этом коэффициент ослабле-ния поля β(τ) изменяется в пределах от 1 до наимень-шего допустимого значения.
Входной координа-той будет приращение β‚ а выходной – приращение v (рис. 7.5б и в). В отличие от схемы 7.3 здесь осущест-вляется преобразование Δiв(Δβ), соответствующее передаточной функции Wв(p). Ему отвечает зависимость iв = βi, полный дифференциал которой
diв= βdi+idβ
или в конечных приращениях относительно исходных значений i0 и β0
Δiв = Δβ i0 + Δi β0. (7.20)
В операторной форме
Δiв(р) = W′6(p)Δβ(р) + W″6(p)Δi(p),
где из начальных условий
W′6(p)= к′7= i0; W″6(p)= к′6= β0.
При регулировании тока возбуждения необходимо учитывать зависимость силы тяги Fк не только от тока i, но и от магнитного потока
Fк ≈смФi, (7.21)
где см= 0,367се.
В соответствии с уравнениями (7.20) и (7.21) приращение силы тяги
,
где .
Величины i и Ф принимают равными i0 и Ф0 (см. рис. 7.2б).
Структурная схема для рассматриваемого случая (рис. 7.5в) позволяет записать эквивалентное преобразование входной координаты в выходную, которое соответствует инерционному звену 2 порядка.

Структурные схемы любой сложности можно привести к одноконтурной схеме (рис. 7.6а) с главной обратной связью (ГОС). Для оценки динамических свойств САР необходимо знать передаточные функции разомкнутой Wр(р) и замкнутой Wэ(р) системы, переда точные функции замкнутой системы по ошибке WΔ(р) и по возмущению Wq(р).
Передаточная функция замкнутой САР в разомкнутом состоянии выражается отношением преобразования Лапласа регулируемой величины у(р) к преобразованию Лапласа сигнала ошибки (рассогласования) Δ(р):
W(p)= у(р)/Δ(р).
Такая формулировка соответствует тому, что при размыкании цепи ГОС у сумматора входной координатой САР будет ошибка Δ. Передаточная функция Wр(р) может быть вычислена по структурной схеме. При этом считается, что возмущение q=0, а САР после размыкания цепи ГОС состоит только из последовательно соединенных звеньев, поэтому
,
где Wi(p)=М1(р)/Ni(р) – передаточная функция каждого последовательного звена, которую можно представить отношением двух полиномов.
Таким образом,
, (7.22)
где – полином числителя передаточной функции разомкнутой САР:
Е(р) == Ет рт + Ет-1рт-1 + ... + Е1р + Е0;
F(p) – полином знаменателя передаточной функции разомкнутой системы:
F(p)= Fпрn+ Fn-1pn-1 +…+ F1p + F0.
Порядки т и п этих полиномов равны сумме порядков перемножаемых полиномов Мi(р) и Ni(р), при этом для осуществимости системы должно бытъ n>m. Уравнение F(p)=0 является характеристическим для разомкнутой САР.
Передаточную функцию Wр(p) обычно записывают в стандартной форме, когда многочлены числителя и знаменателя имеют свободные члены, равные единице:
, (7.23)
где к= Е0/F0 – коэффициент усиления разомкнутой САР; еi=Еi/E0 при i= 0,1, 2, ..., т; fi = Fi /F0 при i=0, 1, 2 ..., п.
Величина v в уравнении (7.23) соответствует количеству интегрирующих звеньев, включённых последовательно. Её называют порядком астатизма системы. При v=0 система cтатичеcкая, при v=1 – астатическая 1-го порядка‚ при v=2 – астатическая 2-го порядка и т.д.
Если звенья системы типовые, то передаточная функция (7.21) примет вид
,
где α – количество звеньев интегродифферецирующего и дифференцирующего типов; β-α – количество инерционных звеньев 1–го порядка; γ – количество колебательных звеньев.
Передаточная функция замкнутой системы – это отношение преобразования Лапласа регулируемой величины к преобразованию Лапласа задающего воздействия
Wз(p)=у(р)/g(р). (7.24)
При этом, считая q=0, структурную схему рис. 7.6а можно привести к показанной на рис. 7.6б, т.е. замкнутую САР можно рассматривать как разомкнутую, охваченную главной обратной связью. Тогда передаточная функция замкнутой САР
или согласно (7.22) , (7.25)
где D(р)=F(p)+Е(р) – полином знаменателя передаточной функции замкнутой системы, причем .
| Степень р | Коэффициенты Di |
| i=0 | D0=E0+F0 |
| i=1 | D1=E1+F1 |
| ………. | ………. |
| ………. | ………. |
| i=m | Dm=Em+Fm |
| i=m+1 | Dm+1=0+F m+1 |
| ………. | ………. |
| ………. | ………. |
| i=n – 1 | Dn-1=0+Fn-1 |
| i= n | Dw=0+Fn |
Порядок полинома D(р) равен п – порядку старшего полинома F(p). Если предположить, что в уравнении (7.25) р = 0, то
кз= к/(1+ к),
где к – коэффициент усиления замкнутой САР.
Передаточная функция замкнутой САР по ошибке – это отношение преобразований Лапласа ошибки и задающего воздействия
WΔ(p)=Δ(р)/g(р). (7.26)
При q=0 структурную схему рис. 7.6а можно привести к виду рис 7.6в. Передаточная функция WΔ(p) может быть выражена через передаточную функцию разомкнутой САР
. (7.27)
Подставляя в уравнение 7.27 значение Wр(p) из уравнения 7.21, получим
.
Это уравнение можно разложить в ряд Тейлора по возрастающим степеням р
.
Такой ряд сходится при р → 0, т.е. при t→∞, что соответствует уcтановившемуся процессу. Величины Сi, называют коэффициентами ошибок. Их можно определить по общему правилу разложения функции в ряд Тейлора:
C0=[WΔ(p)]p=0; .
Так как передаточная функция по ошибке является дробнорациональной, то коэффициенты ошибок можно получить проще, разделив полином числителя на полином знаменателя и сравнив полученный ряд выражением
С(р) = F(р)/D(р).
Для определения коэффициента ошибок умножим правую и левую части тождества на полином D(р) и, приравняв коэффициенты в левой и правой частях при одинаковых степенях р, получим
F(р) = С(р)D(р)
или Fпрn+ Fn-1pn-1 +…+ F1p + F0= =
| Степень р | Значения коэффициентов |
| i=0 | F0= С0D0 |
| i=1 | F1= С1D0+ С0D1 |
|
i=2 |
|
| …….. | …….. |
| …….. | …….. |
| i=п |
|
Из системы уравнений коэффициентов Fi можно найти выражения для коэффициентов Сi полинома С(р)
Отсюда следует формула для i-того члена
.
Таким образом, коэффициенты ошибок выражаются через коэффициенты полиномов F(р) и Е(р), т. е. через физические параметры звеньев системы. На основе выражения (7.24) можно записать уравнение для ошибки

или в области времени
(7.28)
Из уравнения (7.28) видно, что при заданном g(t) ошибка Δ(t) будет равна нулю, только если все Сi = 0. На практике можно получить системы, у которых равны нулю только отдельные коэффициенты ошибок.
Передаточную функцию замкнутой системы по ошибке можно получить и относительно возмущающего воздействия WΔq(p)=Δ(р)/q(р).
Передаточная функция замкнутой системы по возмущению – это соотношение преобразований Лапласа регулируемой величины и возмущения
Wq(p)=у(р)/q(р). (7.29)
При этом структурную схему рис. 7.6а можно привести к виду 7.6г. Передаточную функцию определяют по уравнению (7.29) для заданного возмущения, не учитывая все другие возмущения и задающее воздействие. Знак ГОС на схеме рис. 7.6г учтён введением дополнительного звена с передаточной функцией
Wn+1(p)= – 1. По рис. 7.6г звено с передаточной функцией Wn(p) находится в цепи прямой связи относительно возмущения q(р), а звенья W1(p)), W2(p), ..., Wn+1(p) – в цепи обратной связи и поэтому
.
Перенесем точку разветвления с выхода звена Wп(p) на его вход, введя это звено в цепь обратной связи. В этой цепи Оказываются теперь все п звеньев, поэтому передаточная функция цепи обратной связи совпадает с передаточной функцией разомкнутой системы Wр(p). Учтём дополнительное звено с передаточной функцией Wn+1(p)= – 1, изменив знак в элементе сравнения с плюса на минус (рис. 7.6д). Первую часть этой схемы, содержащую цепь обратной связи, можно заменить эквивалентным звеном с передаточной функцией [1+ W (p)]-1. Вторая часть Wп(p) схемы рис. 7.6д представляет собой передаточную функцию разомкнутой САР по возмущающему воздействию Wqр(p), так как она в соответствии с рис. 7.6а определяет связь между выходной координатой системы у и возмущением q при разомкнутой цепи главной обратной связи. Поменяв местами звенья Wqр(p) и [1+ W (p)]-1] получим схему, приведённую на рис. 7.6д.
Таким образом, для нахождения передаточной функции САР по некоторому возмущению qi, приложенному в любой точке системы, следует найти передаточную функцию разомкнутой системы по этому возмущению Wqiр(p) и разделить ее на передаточную функцию разомкнутой системы Wр(p), увеличенную на единицу
.
Рассмотрим способ определения реакции САР – функции у(р) по известным передаточным функциям Wз(p) и Wqi(p). Из соотношения (7.24) следует, что при отсутствии возмущающих воздействий у(р)= Wз(p)g(р). При отсутствии задающего воздействия реакция САР на данное возмущающее воздействие определяется из уравнения. (7.29) как у(р) = Wqi(p)qi(р).
Так как система линейна, то при наличии управляющего и возмущающего воздействий, пользуясь принципом наложения, получим
. (7.30)
Подставим в это уравнение вместо передаточных функций Wз(p) и Wqi(p) их выражения:
или
, (7.31)
где Qi(р) – полином числителя cоответствующей передаточной функции Wз(p).
Перейдя от изображений к оригиналам, можно получить дифференциальное уравнение системы.
На основе выражения (7.31) представляется возможным определить общее уравнение САР относительно ошибки. Действительно,
Введя у =g-Δ, получим
.
Перенеся g(р) в правую часть и изменив знаки, получим
,
откуда
,
где WΔqi(p) – передаточная функция замкнутой системы по ошибке относительно i-того возмущения: WΔqi(p) = – Wqi(p).
Уравнения САР относительно ошибки будут в дальнейшем использованы при расчете процессов регулирования в линейных системах.

Структурные схемы САР разрабатываются по функциональным схемам на основе детального анализа преобразования сигналов каждым функциональным элементом. При составлении структурных схем линеаризованных САР ЭПС можно использовать структурные схемы и эквивалентные передаточные функции объекта регулирования ОР ( двигателя) как линеаризованного звена, полученные ранее. Кроме того, необходимо выполнять линеаризацию и всех остальных элементов функциональной схемы – управляющего УЭ, исполнительного ИЭ и чувствительного ЧЭ.
Обычно УЭ преобразует рассогласование Δ в сигналы угла управления выпрямителя α, частоты f или длительности импульсов τ; т.е. управляет работой тиристорного ИЭ. Элемент УЭ выполняют на базе электронных устройств и его можно рассматривать как безынерционное звено с передаточной функцией
W1(p)= к1,
где к1 – коэффициент усиления, равный отношению приращения выходного сигнала Δα, Δ f, или Δτ к приращению входного Δи.
Тиристорный исполнителъный элемент также можно считать безынерционным. Для тиристорного преобразователя, регулирующего ослабление возбуждения двигателя, передаточная функция W2(p) аналогична передаточной функции УЭ:
W2(p)= к2,
где к2 – коэффициент усиления: отношение приращения коэффициента ослабления возбуждения Δβ к приращению входного сигнала Δτ.
Для тиристорных преобразователей, регулирующих напряжение на зажимах двигателя ик или напряжение ив при независимом возбуждении тяговых двигателей, изменение соответствующей выходной координаты определяется не только изменением входной, но и возможным изменением напряжения источника питания – контактной сети. Поэтому структурную схему и передаточные функции этих элементов можно определить на основе соответствующих уравнений.
При фазовом регулировании выпрямленное напряжение иd = 0,5кcхи2(1+cosα). Здесь кcх – коэффициент схемы. Определим отклонения иd, вызванные малыми отклонениями и2 и α от начальных значений и20 и α0 с помощью формулы полного дифференциала
, (7.32)
где .
Подставляя эти выражения в уравнение (7.32) и заменяя бесконечно малые отклонения конечными, получим
, (7.33)
где W′2=к′2= –0,5ксхи20sinα0 (p) и W″2=к″2= –0,5ксх(1+cosα0) (p).
Уравнению (7.33) соответствует структурная схема рис. 7.7.
Для импульсных тиристорных преобразователей при частотном и широтном регулировании напряжение на зажимах двигателя ик =исτf.
Зависимость Δик от Δис и Δf определенная на основе формулы полного дифференциала, при частотном регулировании выражается уравнением
где W′2(p)=к′2= ис0τ0 и W″2(p)=к″2=f0 τ0.
При широтном регулировании
где W′2(p)=к′2= ис0f0 и W″2(p)=к″2=f0 τ0.
Структурные схемы таких исполнительных элементов аналогичны схеме, приведенной на рис. 7.7.
Чувствительные элементы, как и управляющие, можно представить усилительным звеном с передаточной функцией ЧЭ WЧЭ(p)=кЧЭ, которая численно равна изменению выходного сигнала (напряжения и2 при единичном изменении входного сигнала – тока или скорости движения.
Составим для примера структурную схему и определим передаточные функции одноконтурной системы стабилизации тока i двигателя последовательного возбуждения регулированием напряжения ик. Структурная схема этой САР (рис. 7.8а) соответствует функциональной, приведённой на рис. 7.4 при работе канала регулирования напряжения с управляющим элементом УЭ1 и исполнительным ИЭ1. На структурной схеме ИЭ представлен в виде двух звеньев W′2(p) и W″2(p) применительно к импульсному тиристорному преобразователю, а объект регулирования ОР (см. рис. 7.4б) – тремя звеньями W3(p), W4(p) и W5(p), преобразующим ик(р) в Δi(р)*; чувствительному элементу соответствуёт звено W6(p). [*Передаточной функции W3(р) на рис. (7.4б) соответствует передаточная функция ‚ W1(р) = к1/(1+ Т1p), а функции W′5(p) соответствует W″5(p)=Сv0.]
Преобразуем эту структурную схему, перенеся точку разветвления со входа звена W6(p) на его выход (рис. 7.8б) и заменив звенья, соответствующие ОР, эквивалентным звеном с передаточной функцией тягового двигателя Wэ2(p), которая определяется выражением (7.19). По схеме рис. 7.8б найдём передаточные функции системы регулирования, приняв вначале за выходную координату сигнал Δи2. Передаточную функцию разомкнутой САР получим, разомкнув ГОС у первого элемента сравнения
,
где к = к1к′2кэ2к6 – коэффициент усиления разомкнутой САР.
Эта передаточная функция соответствует инерционному звену 1-го порядка.
Передаточную функцию замкнутой САР по рис. 7.8б найдём с учётом влияния отрицательной обратной связи
,
где кз= к /(1 + к) и Тз= Тэ2 /(1+ к), что также соответствует инерционному звену 1-го порядка.
Передаточная функция замкнутой САР по ошибке
где кΔ= 1/(1 + к).
Передаточная функция замкнутой САР по возмущению
,
где кq=к″2кэ2к6(1+к).
Общее уравнение системы в соответствии с уравнением (7.30) представляется в виде
.
Переходя от координаты Δи2(р)к Δi(р),
.
Ошибка в рассматриваемой САР в соответствии с уравнением (7.31) определится как
;
.
Структурные схемы, передаточные функции, уравнение системы, уравнение ошибки можно получить и для других вариантов САР ЭПС так же, как и в рассмотренном случае.
Введение положительной обратной связи по ЭДС в контур стабилизации тока. Напряжение ик на зажимах двигателя на 80…90 % уравновешивается его ЭДС, поэтому в системах автоматического управления промышленным электроприводом часто вводят положительную обратную связь по ЭДС (рис. 5.9). Здесь изменение управляющего сигнала Δиз соответствует не более чем 20 % изменения Δик, так как весь остальной диапазон изменения этого напряжения определяется сигналом Δи4, пропорциональным ЭДС.
Такие САР обладают лучшими динамическими свойствами, так как регулятор W1(p) может быстрее «отработать» возникшее рассогласование. Недостатком этих САР является необходимость введения дополнительного функционального элемента W8(p), выполняющего вычисление ЭДС, поскольку измерить ее на работающем тяговом двигателе не представляется возможным. Дополнительная обратная связь по ЭДС впервые была введена на электровозе однофазно-постоянного тока ВЛ80Р -1669, оборудованном по схеме Новосибирского научно-исследовательского центра завода «Сибстанкоэлектропривод».
Введение в закон регулирования производных. Как отмечалось ранее, введение производных в закон регулирования позволяет выявить тенденции в изменении величины Δ и за счет этого получить более качественные системы регулирования. В этом случае структурная схема САР изменяется, так как параллельно с интегрирующим звеном W1(p)= 1/(Тир) (см. рис. 7.8) необходимо включить дифференцирующее звено W8(p)= Тир (рис. 7.10а). В этом случае передаточная функция регулятора Р будет определяться выражением:
.
Иногда вместо производной от рассогласования в САР вводят производную регулируемой величины. В этом случае структурная схема принимает вид, показанный на рис. 7.10б, а закон регулирования определяется выражением
.
Аналогичным образом в законы регулирования могут быть введены производные более высоких порядков. С этой целью параллельно звену W8(p) необходимо включить дополнительные звенья, выполняющие выделение производных второго, третьего и т. д. порядков. Однако на практике обычно ограничиваются введением производной первого порядка, так как с увеличением порядка производной, как правило, увеличивается влияние высокочастотных помех.
При учете реальных нелинейных характеристик функциональных элементов составление структурных схем не облегчает получения уравнений переходных процессов. Поэтому обычно ограничиваются описанием работы САР с помощью систем нелинейных дифференциальных уравнений. Используя уравнения, полученные ранее при описании объекта регулирования и исполнительного элемента, составим такие системы уравнений для ряда САР ЭПС.
Система автоматической стабилизации тока возбуждения. Системы автоматической стабилизации тока возбуждения применяют на электровозах ВЛ85 в режиме рекуперативного торможения, а так же на электровозах ВЛ80Т и ВЛ80С в канале стабилизации тока возбуждения при реостатном торможении. Кроме того, такие САР применяют в режимах тяги и электрического торможения на электровозах с независимым и смешанным возбуждением тяговых двигателей.
Будем считать, что в этой системе так же, как и в САР стабилизации тока ЭПС, рассмотренной ранее, используется регулятор, работа которого описывается уравнениями:
 x1 при Δи>δ;
x1 при Δи>δ;
x= 0 при –δ ≤ Δи ≤ δ; 7.34)
–x1 при Δи<–δ.
Преобразование этого сигнала в импульсы управления происходит при сравнении сигнала из с опорным напряжением иоп, которое в течение полупериода питающего напряжения 0,5tп=1/(2fc) изменяется либо по линейному, либо по косинусоидальному закону (рис. 7.9):
.
Результат сравнения определяется как разность иср=иоп – из.
Момент времени формирования импульса управления определяется выполнением условия
иср=0 или из=иоп.
Для линейно изменяющегося напряжения зависимость имеет вид
.
Управляющий импульс формируют путем дифференцирования напряжения иср. При этом на участке линейного изменения иср(t) производная dиср/dt = const, а затем в момент равенства иоп(t) и из производная dиср/dt = 0. В случае изменения опорного напряжения по закону косинуса время , определяемое равенством иоп(t) и из –
.
Отсюда
.
Процессы, протекающие при питании выпрямительной установкой обмотки возбуждения двигателя при подаче импульсов управления на тиристоры в моменты времени при значениях логических функций G1 и G2, указанных в табл. 6.1,были описаны ранее.
Переход от тока обмотки возбуждения iв к напряжению на выходе чувствительного элемента и и работу элемента сравнения можно описать линейными уравнениями:
и2=k1iв и Δи=k2(и1-и2).
Таким образом, приведённые выше уравнения описывают переходные процессы в замкнутой нелинейной системе автоматической стабилизации. Совместное их решение при изменении задающего сигнала и1 или возмущения етр2 позволяет построить графики изменения регулируемой величины iв или ошибки Δи и оценить качество регулирования.
Аналогично, используя уравнения объектов регулирования и исполнительных элементов, приведенных ранее, можно составить системы уравнений для различных САР ЭПС. Для расчета переходных процессов в САР на ЭВМ по уравнениям системы регулирования известными методами составляют программу работы вычислительной машины.
Система автоматического регулирования угла запаса выпрямительно-инверторного преобразователя. Составим уравнения, описывающие переходные процессы в системе автоматического регулирования угла запаса на основе функциональных схем, приведенных на рис. 6.35. Обе эти схемы содержат датчик угла коммутации γ, является датчик угла коммутации (рис. 4.10), который содержит трансформатор переменного тока ТТ, параллельно вторичной обмотке которого подключены дроссель насыщения ДН и выпрямитель В. Дроссель ДН находится в состоянии насыщения практически при любом токе. В течение угла коммутации γ, который показан на кривой выходного напряжения инвертора и2 происходит перемагничивание дросселя током iL. В остальную часть каждого полупериода ток дросселя остается неизменным и, следовательно, напряжение uL на его обмотке равно нулю. Таким образом, длительность импульса напряжения на выходе датчика соответствует углу γ, а его амплитуда зависит от скорости изменения тока в обмотке дросселя. Если на выходе датчика включить стабилитрон VD, который ограничит амплитуду на постоянном уровне, то и среднее значение выходного напряжения будет пропорционально углу γ.
 – ЧЭγ (см. рис. 7.10), входным сигналом для которого является ток трансформатора i, вычисляемый на осно-ве решения уравнений (6.7). Работа ЧЭ может быть описана следующими соотношениями:
– ЧЭγ (см. рис. 7.10), входным сигналом для которого является ток трансформатора i, вычисляемый на осно-ве решения уравнений (6.7). Работа ЧЭ может быть описана следующими соотношениями:
.
Вычитая uоп из uL отсекают малые колебания и вызванные пульсациями тока iтр. В результате этого сигнал и0 представляет собой практически прямоугольный импульс, длительность которого t2–tβ соответствует времени коммутации, а моменты времени tβ и t2 – соответственно моментам начала и окончания коммутации. При этом амплитуда импульса и0 практически постоянна. В результате интегрирования определяется напряжение и(γ), пропорциональное длительности периода коммутации t2–tβ.
Аналогичным образом определяется сигнал и(δ) на выходе датчика угла запаса ЧЭδ. В качестве такого датчика используют обычный триггер, который запускается в момент времени t2, соответствующего моменту окончания коммутации. Сброс этого триггера производится синхроимпульсом от устройства синхронизации в момент перехода кривой питающего напряжения через нуль, т.е. через каждый полупериод 1/(2fc). На выходе триггера появляется прямоугольный импульс, длительность которого пропорциональна углу запаса, а амплитуда и0 такая же, как и амплитуда импульса у датчика ЧЭγ. Преобразование этого импульса в напряжение и(δ), пропорциональное углу δ, можно описать с помощью интегрирования
.
Напряжение и(π) получают аналогичным образом, интегрируя сигнал и0 на протяжении всего полупериода:
.
Затем напряжения складываются:
.
Формирование импульса управления в момент времени tβ про исходит при сравнении напряжения и(αβ) с опорным напряжением. При этом результат сравнения принимает вид:
.
Здесь индекс п–1 означает результат измерения в предыдущий полупериод, а индекс п относится к моменту формирования управляющего импульса в следующий полупериод.
Следует иметь в виду, что в соответствии с функциональной схемой, приведенной на рис. 6.35а, напряжение и(γ) преобразуется по закону регулирования регулятора Рγ. В отличие от этого схема на рис. 6.35б предполагает преобразование регулятором сигнала и(δз) – и(δ).
Импульсы управления тиристорами, формируемые в моменты tβn так же, как и в моменты , определяют проводящее состояние вентилей, при котором возникают переходные процессы в силовой цепи электровоза, описываемые уравнениями (6.7).
Уравнение контура регулирования скорости ЭПС с тиристорным управлением. Рассмотрим уравнения контура регулирования скорости для ЭПС с тиристорными преобразователями. При использовании тиристорных преобразователей САР скорости движения могут быть реализованы на ЭПС с тяговыми двигателями как последовательного, так и не зависимого возбуждения. Во втором случае такая САР содержит дополнительный контур регулирования возбуждения. Рассмотрим подробнее уравнения САР скорости движения для этого случая, поскольку эти же уравнения без учета контура регулирования возбуждения могут быть использованы и для описания САР с двигателями последовательного возбуждения.
В соответствии с ранее сделанными допущениями контуры регулирования токов якоря и возбуждения заменим апериодическими звеньями 1-го порядка с уравнением
.
При l=1 контур регулирования тока якоря имеет параметры: k1=1 и Т1=0,1 с, а при l=2 – контур регулирования тока возбуждения с параметры k2=1 и Т2=0,2 с.
Сила тяги электровоза определяется соотношением Fк=смФiя, а связь силы тяги со скоростью движения –уравнением
. (7.35)
В уравнении (7.35) учитываются три составляющие сопротивления: движению поезда от уклона Wi, основное для электровоза Wоэ и грузовых вагонов Wов:
W= Wi+ Wоэ+ Wов.
При этом
Wоэ= aоэ+ a1эv+ a2эv2 и Wов= aов+ a1вv+ a2вv2.
Коэффициенты аi в этих уравнениях определяются правилами проведения тяговых расчетов.
Уравнение регулятора скорости запишем в виде
, (7.36)
где x1 при Δv>δ;
x= 0 при – δ <Δv<δ;
–x1 при Δv<–δ,
а .
Таким образом, здесь введена производная dv/dt регулируемого параметра, что уменьшает отклонение фактического значения регулируемой величины от заданной.
Величина х1 зависит от допустимой силы тяги Fк и минимального времени нарастания силы тяги Тт
х1= Fк / Тт. (7.37)
Постоянную времени Тт можно в первом приближении определить по зависимости, обеспечивающей допустимый уровень продольных сил в поезде
, (7.38)
где т – масса поезда; kf – коэффициент формы нарастания силы тяги (торможения).
Lопустим, что программный элемент ПрЭ в этой схеме реализует только простейшую форму ограничения по потенциальным условиям. С этой целью ПрЭ вычисляет отношение токов Iвз/ Iяз и сравнивает его с допустимым значением 0,42. При нарушении условия (Iвз/ Iяз)>0,42 на выходе ПрЭ появляется сигнал х2, т.е.
Эта система регулирования в процессе работы перестраивает свою структуру. Так, при трогании и разгоне поезда САР работает как трёхконтурная с контурами регулирования скорости, тока якоря и тока возбуждения. В этом режиме заданное значение тока возбуждения Iвз поддерживается равным максимальному его значению, а заданное значение тока якоря Iяз регулятор скорости увеличивает в соответствии с соотношениями (7.36)…(7.38).
После того, как напряжение и на зажимах тягового двигателя достигнет величины номинального значения ик в работу вступает дополнительный, четвёртый контур регулирования, уменьшающий сигнал, пропорциональный заданному значению тока возбуждения, на величину тока коррекции Iк
Поскольку контур регулирования тока якоря заменён одним эквивалентным звеном, то для определения ик в данной модели приходится по значениям скорости v и магнитного потока Ф вычислять ЭДС двигателя е= сеФv,
 а затем вычитать из ЭДС падение напряжения на якоре двигателя ик=е– iяrя.
а затем вычитать из ЭДС падение напряжения на якоре двигателя ик=е– iяrя.
В действительности на ЭПС напряжение ик определяется по сигналу датчика напряжения и вычисления его по формулам не требуется.
Наконец, при выходе на ограничение по потенциальным условиям в работу включается пятый контур регулирования. Этот контур вводит в РС сигнал х2, уменьшающий заданное значение тока якоря.
Для обеспечения хороших показателей такой системы величина Тд должна изменяться в зависимости от величины Fк и массы поезда (рис. 7.11), где показаны зависимости постоянной времени регулятора скорости от максимальной силы тяги при значениях массы поезда: 1 – 6000 т; 2 – 4000 т; 3 – 1000 т.
Уравнение контура регулирования скорости ЭПС с резисторно-контакторным управлением. Регулятор скорости на ЭПС с резисторно-контакторным управлением осуществляет переключение позиций управления в строго определенном порядке, т.е. на выходе исполнительного регулятора скорости имеются всего два сигнала: «Увеличение номера позиции» и «Уменьшение номера позиции». В простейшем случае эти сигналы формируются непосредственно регулятором скорости поезда. На вход регулятора скорости в определённые моменты времени t=kTц (см. рис. 5.5) поступает сигнал с выхода элемента сравнения Δv[kTц]=vз[kTц] – vизм[kTц], определяющий рассогласование между заданным и измеренным значениями скорости. Учитывая инерционность объекта управления, вычитаем из этой разности сигнал, пропорциональный измеренному значению ускорения поезда:
ΔvΣ[kTц]= Δv[kTц] –кааизм[kTц],
где ка – коэффициент усиления по ускорению.
Этот сигнал преобразуется промежуточным элементом с характеристикой, аналогичной системе (7.34) в сигнал х:
1 при ΔvΣ>δ;
x[kTц]= 0 при ΔvΣ│ ≤ δ;
–1 при ΔvΣ<–δ.
Номер позиции N определяется следующим образом:
Скорость поезда массой mп в режиме тяги определяется с помощью решения дифференциального уравнения движения поезда:
(7.39)
Сила тяги поезда FN(v) зависит от номера позиции группового переключателя, т.е. от номера ступени управления напряжением Nст и номера ступени управления возбуждением Nсв. Уравнения тяговых характеристик электровоза в зависимости от Nст и Nсв
(7.40)
где пд – количество тяговых двигателей; Fд – сила тяги одного двигателя; I – ток тягового двигателя; rд– сопротивление обмоток якоря и полюсов двигателя; R(Nсн) – добавочное сопротивление, приведенное к одному двигателю (для электровозов постоянного тока это – сопротивление пусковых реостатов; для электровозов переменного тока – внутреннее сопротивление трансформатора, реакторов и вентилей); U(Nсн) – напряжение на двигателе и сопротивлении R.
Зависимости Ф(I, Nсв) и Fд(I, Nсв) являются постоянными характеристиками тягового двигателя и не зависят от напряжения контактной сети Uкс.
Для электровоза постоянного тока увеличение U достигается уменьшением количества последовательно подсоединяемых к токоприёмнику двигателей
пс(Nсн) – U=Uкс/пс(Nсв). (7.41)
Например, у электровоза ЧС2, имеющего шесть тяговых двигателей, пс может быть равно шести (последовательное соединение), трем (последовательно-параллельное по три двигателя в цепи) и двум (последовательно-параллельное по два двигателя в цепи). При уменьшении пс увеличивается количество цепей параллельно соединенных групп двигателей пп= пд/пс.
У электровозов переменного тока напряжение Uд зависит от коэффициента трансформации тягового траисформатора кт(Nсн)
, (7.42)
где Uкс – действующее значение напряжения на токоприемнике; ΔUв – падение напряжения на выпрямительной установке.
Для задания характеристик сеФ (I, Nсв) используется кусочно–линейная аппроксимация этих кривых
сеФ (I, Nсв)=(I–In)кп(Nсв)+ сеФп(Nсв), (7.43)
где In, сеФп(Nсв) – координаты п-ного узла аппроксимации.
При этом
Такое задание кривых намагничивания тягового двигателя позволяет свести нелинейные (относительно тока) уравнения (7.40) к линейным, подобрав соответственно номер интервала аппроксимации.
Напряжение на токоприемнике рассчитывается по формуле
, (7.44)
где Uф – напряжение на фидере тяговой подстанции; ΔUс, ΔUр – падение напряжения в контактной сети соответственно от сопутствующих и расчетного поездов.
Последняя величина
ΔUр=Iэzкс, (7.45)
где Iэ – ток электровоза; zкс – полное сопротивление контактной сети и рельсов между электровозом и подстанциями.
При двусторонней схеме питания
, (7.46)
где – координата k-той подстанции; s – координата поезда ()‚ ρ – полное сопротивление 1 км контактной сети и рельсов.
При моделировании движения электровозов постоянного тока предполагалось Uф= 3,3 кВ, ρ=0,043 Ом/км (два контактных провода МФ-150, несущий трос М-120, рельсы Р65). Ток электровоза
Iэ=Inп,
где I – ток одной параллельной ветви двигателя.
При моделировании движения электровозов переменного тока предполагалось Uф=27,5 кВ, ρ=0,22 Ом/км (контактный провод МФ-100, несущий трос М-95, рельсы Р65). Действующее значение тока электровоза
.
На основании выражений (7.45) и (7.46), зная координату и ток электровоза, легко вычислить значение ΔUр. Сложнее определить падение напряжения от сопутствующих поездов, так как точный расчёт ΔUс требует моделирования всей случайной поездной ситуации в фидерной зоне. С целью упрощения моделирующей программы используется приближенная формула:
.
Коэффициент пропорциональности
, (7.47)
где lср– среднее расстояние между подстанциями, км (для постоянного тока lср= 20 км; для переменного lср = 40 км); tч, tн – межпоездные интервалы соответственно для чётного и нечётного направлений, мин.
Объединяя выражения (7.44), (7.45) и (7.47), получим
. (7.48)
Основным источником погрешности при таком способе учета падения напряжения от сопутствующих поездов является искусственное завышение перепадов напряжения на токоприемнике расчетного электровоза. В действительности моменты изменения токов расчетного и сопутствующих поездов не совпадают и перепады напряжения несколько сглаживаются. Таким образом, рассмотренная методика предполагает введение более сильного, чем на практике, возмущающего воздействия.
Расчет силы тяги электровоза производится на основании тока тягового двигателя. С учетом выражений (7.39)…(7.43), (7.46), (7.47) и (7.48) этот ток рассчитывается по следующей формуле:
, (7.49)
где иэф, rэс – соответственно напряжение фидера тяговой подстанции и сопротивление контактной сети (с учетом влияния сопутствующих поездов), приведенные к одному тяговому двигателю.
Для электровозов постоянного тока
,
а для электровозов переменного тока
.
4 Третья кантовская антиномия - лекция, которая пользуется популярностью у тех, кто читал эту лекцию.
При вычислении тока тягового двигателя по выражению (7.49) должно выполняться условие In≤ I≤In+1 в противном случае номер интервала аппроксимации п изменяют до тех пор, пока ток тягового двигателя не попадет на этот интервал. Сила тяги электровоза вычисляется по зависимостям Fд(I, Nсв) с помощью их кусочно линейной аппроксимации, аналогичной выражениям (5.43).
Таким образом, предложенный способ расчета силы тяги электровоза позволяет моделировать его движение на всех, в том числе и неходовых позициях управления.
Если известна методика расчета отдельных составляющих правой части уравнения (7.39), то с помощью численного его интегрирования легко определить скорость и координату поезда в любой момент времени. При моделировании реального переключения позиций управления электровоза целесообразно шаг интегрирования Δtn выбрать равным времени переключения контроллера, составляющего, как правило, десятые доли секунды. При этом для получения приемлемой точности расчетов (не хуже 0,8 км/ч) достаточно использовать метод Эйлера:
Решение всех рассмотренных уравнений при замене номера позиции N соответствующим значением Nсн или Nсв позволяет исследовать переходные процессы изменения скорости движения поезда.
Обратим внимание, что при исследовании динамики этой системы переходными процессами в цепи тяговых двигателей также пренебрегаем. Это связано с тем, что инерционность поезда как минимум на два порядка выше инерционности электрической цепи двигателей.




















