
Аэродинамические характеристики вертолетов
Лекция 28
Тема 11. Аэродинамические характеристики вертолетов
11.1. Аэродинамическая компоновка и аэродинамические схемы вертолетов Идея создания ЛА тяжелее воздуха, способного вертикально взлетать при помощи несущего винта, впервые была высказана Леонардо да Винчи в 1475 году. Эскиз и описание его аппарата, сделанные великим ученым собственноручно, были обнаружены в Миланской библиотеке в конце Х1Х века .
Автор представлял такой ЛА в виде большого винта из накрахмаленной парусины на проволочном каркасе, который приводится во вращение мускульной силой человека.
О реактивном моменте, возникающем на корпусе при вращении несущего винта, и о способах его уравновешивания автор не знал.
Смелая идея в силу позднего обнаружения рукописи и низкого уровня техники в то время не оказала практического влияния на историю создания вертолета.
Впервые обосновал возможность создания вертолета в 1754 году М. В. Ломоносов . Он построил летающую модель для использования в практических
целях – подъема метеорологических приборов. Она была двухвинтовой схемы с приводом от часовой пружины. Таким образом М. В. Ломоносов впервые установил наличие реактивного момента и предложил способ его парирования.
Рекомендуемые материалы
Многие российские ученые во второй половине Х1Х и начале ХХ века работали над созданием вертолетов. Наиболее известны работы электротехника Н. А. Лодыгина, металлурга Д. К. Чернова, ученого М. А. Рыкачева, изобретателей Неждановского, Гроховского, Кузьминского, Коновалова, Сауляна, Алексеева, Эвальда, Янушева, Яблонева, Липковского и др. (См. В. Михеев. Вертолеты дореволюционной России. 1992 г.).
Первый официально зарегистрированный подъем в воздух натурного вертолета состоялся 16 сентября 1907 года в Париже. Конструкторами аппарата под названием "Бреге-1-Жироплан" были братья Луи и Жак Бреге и Шарль Реше. Аппарат, не имевший органов балансировки и управления поднялся на высоту 1,5м и провисел 1 мин. (таков был ресурс трансмиссии). Чтобы не опрокинулся, его со всех сторон поддерживали механики. Имел 4 винта и бензиновый мотор.
Перед революцией в России наиболее интересными были работы Б. Н. Юрьева. Ему принадлежит разработка новой системы управления вертолетом с помощью автомата перекоса (1911г). В 1912 г. модель его вертолета экспонировалась на международной выставке воздухоплавания и автомобилизма, приуроченной ко 2 Всероссийскому воздухоплавательному съезду в Москве, и получила золотую медаль.
В связи с первой мировой, а затем и гражданской войной работы по вертолетам на долгое время. были прерваны. И лишь в 1928 г. было начато проектирование первого Советского вертолета "ЦАГИ-1ЭА". В 1932 г. летчик Черемухин на этом вертолете более чем в 30 раз превысил рекорд высоты, достигнув 605 м (рекорд был 18 м - Асканио в 1928 г.). Рекорд не был зарегистрирован, т.к. СССР тогда не состоял в ФАИ. И официальный рекорд мира лишь в 1936 г. был 158 м (Бреге-Доран).
Широким фронтом были развернуты работы и по созданию автожиров. 1931 г.- "ЦАГИ-2-ЭА".
Начинают организовываться 'вертолетные ОКБ. 1940 г - ОКБ-3 Юрьева и Братухина - двухвинтовой вертолет "Омега".
КБ Камова в 1947 г. испытала первый вертолет соосной схемы.
После ВОВ организуются ОКБ Камова, Миля, Яковлева. "КА":
Ка-8 "Иркутянин" - 1945 г. (парад в Тушино),
Ка-18 - 1958 г.- золотая медаль на всемирной выставке в Брюсселе.
ll~lt
ЯК -100- 1947 г.
ЯК -24 - 1951 г (ЯК-24А-60г).
"МИ" - более 100 мировых рекордов.
В общем из существующих мировых рекордов на вертолетах 30% принадлежит советским летчикам.
Примеры современных и разрабатываемых российских вертолетов: Ка-50, Ка-52, Ка-62, Ка-118, Ка-126, Ка-128, Ка-226. Ми-28, Ми-26, Ми-38, Ми-40 (БМП), Ми-46Т, Ми-54.
Приведенные примеры показывают многообразие схем вертолетов. Основная классификация аэродинамических схем проводится по количеству
и расположению несущих винтов:
- одновинтовая с рулевым винтом - двухвинтовая ;
- соосная;
- поперечная;
- с перекрещивающимися винтами (фирмы "Каман") -многовинтовая
- комбинированные ЛА.
Замечание: одновинтовая схема может быть с реактивным приводом винта. Преимущества и недостатки различных схем вертолетов будут рассмотрены
на групповом занятии.
Любая схема вертолета в качестве основного элемента имеет несущий винт, аэродинамика которого настолько сложна, что зачастую в расчетах отождествляется с аэродинамикой вертолета в целом.
11.2. Несущий и рулевой винты вертолета и их геометрические характеристики
Несущий винт (НВ) вертолета служит для создания подъемной силы и силы
тяги (пропульсивной силы), необходимых для полета. Изменением величины и направления тяги винта можно изменять не только скорость, но и направление полета вертолета. Таким образом, НВ играет роль крыла, движителя и органов управления ЛА.
Основные геометрические параметры несущего винта:
- число лопастей kл 2...8;
- радиус R=5...40м;
- радиус сечения лопасти r;
- угол установки сечения лопасти - jr;
- угол установки лопасти - j (угол установки сечения на  );
);
- (ометаемая)-площадь НВ – Fн =pR2;
- коэффициент заполнения  ;
;
- форма лопасти в плане;
- - форма профиля лопасти (характеризуется теми же параметрами, что и профиль крыла).
Прежде, чем рассматривать кинематические параметры несущего винта, необходимо заметить, что эти параметры, а также ряд аэродинамических характеристик НВ рассматриваются в полусвязанной системе координат ОнXнYн Zн, у которой начало Он размещается в точке пересечения оси вращения с плоскостью вращения НВ,
ось ОнХн продольная - перпендикулярна оси вращения и имеет такое же направление, как и проекция на плоскость вращения вектора воздушной скорости
НВ,
ось ОнYн нормальная - совпадает с осью вращения и направлена вверх;
ось ОнZн поперечная - составляет с этими осями прямоугольную систему.
Воздушная скорость НВ – vн это скорость начала полусвязанной системы координат относительно невозмущенной среды.
К кинематическим характеристикам НВ относятся следующие:
- угол атаки НВ - aн угол между вектором воздушной скорости и плоскостью вращения (aн > О, если проекция воздушной скорости на ось ОYн отрицательна);
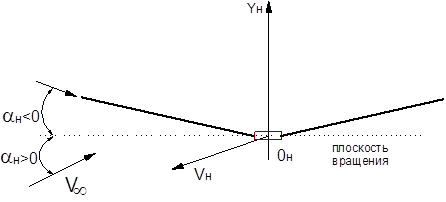 |
Рис.11.1
- угол взмаха лопасти НВ - bл - угол поворота оси лопасти относительно оси ГШ или линии ей эквивалентной для упругой заделки, измеряемый от плоскости вращения. bл aн > О при отклонении оси лопасти в направление силы тяги;
- угол качания лопасти НВ - xл - угол поворота оси лопасти относительно оси ВШ или линии ей эквивалентной для упругой заделки измеряемый от плоскости проходящей через ось вращения и ось лопасти при bл=0, xл > 0 при отклонении оси против направления вращения;
- угол азимутального положения лопасти - yл - угол между отрицательным яалравлением оси ОнXн и осью лопасти при bл=0, xл =0 = (отсчитывается по направлению вращения НВ).
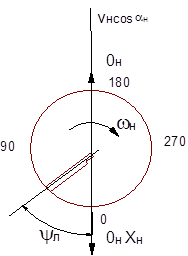
Рис.11.2
- коэффициент режима работы (характеристика режима работы НВ)
где wн - угловая скорость вращения НВ.
Замечание: частота вращения НВ  подбирается такой, чтобы при yл =90' суммарная скорость обтекания конца лопасти не превышала скорости звука;
подбирается такой, чтобы при yл =90' суммарная скорость обтекания конца лопасти не превышала скорости звука;
- окружная скорость концов лопастей в„К=180...230м/с.
11.3. Работа винта на режимах осевого и косого обтекания. Тяга, мощность и КПД винта
Различают два основных режима работы НВ: а) режим осевого обтекания при этом m =0.
Возникает при условии vн =O (работа винта на месте) или при (aн = 900 вертикальный спуск или подъем).
900 вертикальный спуск или подъем).
б) режим косого обтекания (обдувки), - при котором ось втулки НВ расположена не параллельно вектору скорости невозмущенного потока.
При этом m ¹О. (aн ¹ 900).
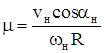
Аэродинамическая сила на НВ в соответствии с импульсной теорией создается за счет отбрасывания винтом массы воздуха с некоторой скоростью, величина которой в плоскости вращения носит название индуктивной скорости Vi.
В результате при полете вертолета в районе винта происходит геометрическое сложение потоков:
- создаваемого винтом
- создаваемого за счет перемещения винта в воздухе.
Тогда величина скорости потока в плоскости вращения винта V1 определяется соотношением
V1=Vi - Vн
 |
Рис.11.3
Импульсная теория позволяет получить формулу, связывающую величину аэродинамической силы НВ Rн с размерами винта и индуктивной скоростью
Аэродинамическая сила НВ раскладывается по осям полусвязанной системы координат. Ее проекции на соответствующие оси называются
- на ось ОнХн - продольная Н,
- на ось ОнYн - сила тяги Т,
- на ось ОнZн - боковая S.
В частном случае осевого обтекания НВ продольная и боковая сила отсутствуют и аэродинамическая сила совпадает с силой тяги.
Тогда при вертикальном подъеме или спуске ( =90о)
=90о)
 ,
,
а при работе винта на месте (Vн=0)  .
.
Величина индуктивной скорости зависит от ряда параметров:
- угла установки лопасти  ,
,
- коэффициента заполнения s,
- угла атаки н,
- воздушной скорости Vн.
При заданных геометрических параметрах качественные зависимости Vi=f (Vн, н) имеют вид
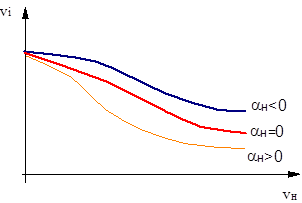 |
Рис.11.4
Тяга НВ также зависит от указанных параметров.
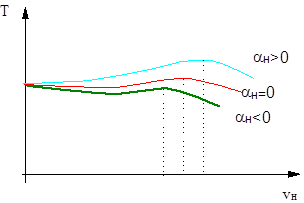 |
Рис.11.5
Характер приведенных зависимостей объясняется следующим: с увеличением Vн увеличивается масса воздуха, взаимодействующего с винтом. Поэтому тяга растет. Но, начиная с некоторой скорости Vн, которая среди прочих величин зависит и от н, над указанным фактором начинает превалировать второй - уменьшение Vi с ростом Vн - тяга падает.
При вращении несущего винта поток оказывает тормозящее действие за счет сил сопротивления, приложенных к лопастям.
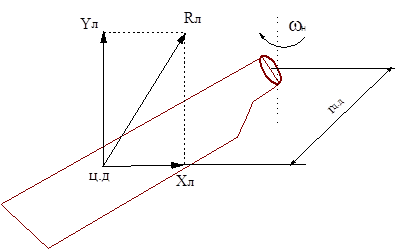 |
Рис.11.6
Для преодоления этих сил к винту необходимо подвести крутящий момент

(при условии 
 н=const).
н=const).
Для выполнения установившегося полета необходимо соблюдение баланса энергий, т.е. чтобы мощность, подводимая к винту от силовой установки, была равна мощности, необходимой для создания потребной тяги для полета на данном режиме.
Эта мощность расходуется на создание индуктивной скорости (Ni -индуктивная мощность), преодоление сопротивления вращению (Nпр - профильная мощность) и вредного сопротивления вертолета при движении (Nдвиж),т.е.

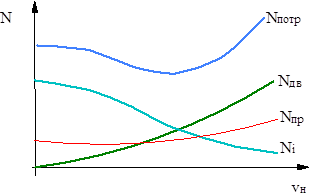 |
Рис.11.7
При прочих равных условиях величина потребной мощности зависит от высоты полета
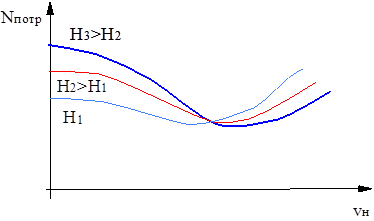 |
Рис.11.8
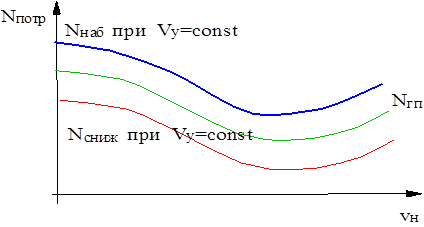
Если подводимая мощность будет больше, чем потребная для горизонтального полета, то возможен разгон вертолета при постоянной высоте полета или набор высоты при сохранении V=const.
Если же Nподв. < Nгп, то при сохранении Н=const будет падать скорость полета или при V=const вертолет будет снижаться.
Если задаться постоянными скоростями набора высоты или снижения, то кривые потребных мощностей для этих режимов полета будут лежать соответственно выше или ниже кривой Nгп=f (Vн).
 |
Люди также интересуются этой лекцией: Задача 5.
Рис.11.9
Коэффициентом полезного действия НВ называется отношение мощности, снимаемой с винта, к мощности, затраченной на его вращение
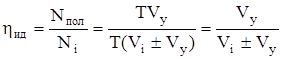
Данный КПД не учитывает потерь мощности на реальном винте, поэтому вводится относительный КПД, представляющий собой отношение мощности, затраченной винтом при отсутствии потерь, к мощности, потребляемой винтом в реальных условиях
Величина данного коэффициента лежит в пределах 0,6...0,75.



















