
Параллельная схема управления
МЕТОДЫ ИСКУССТВЕННОГО ИНТЕЛЛЕКТА
ЛЕКЦИЯ № 11
На последних лекциях мы изучали последовательную схему нейронного управления, сегодня мы разберёмся с параллельной схемой.
ПАРАЛЛЕЛЬНАЯ СХЕМА УПРАВЛЕНИЯ
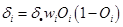
В параллельной архитектуре нейронного управления нейронная сеть используется наравне с обычным ПИД-регулятором.
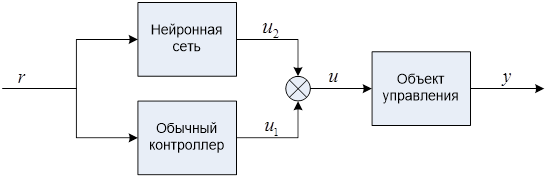
Рисунок. Параллельная схема нейроконтроллера
Нейроконтроллер параллельного типа используется для настройки управляющего входного сигнала  , который является суммой выходов нейросети и обычного контроллера. Настройка выполняется таким образом, чтобы выходной сигнал объекта управления
, который является суммой выходов нейросети и обычного контроллера. Настройка выполняется таким образом, чтобы выходной сигнал объекта управления  как можно точнее соответствовал заданному опорному сигналу
как можно точнее соответствовал заданному опорному сигналу  . Задача нейроконтроллера параллельного типа заключается в том, чтобы подкорректировать управляющее воздействие
. Задача нейроконтроллера параллельного типа заключается в том, чтобы подкорректировать управляющее воздействие  , если оно не обеспечивает хорошего результата.
, если оно не обеспечивает хорошего результата.
Рекомендуемые материалы
Например, хороший повар в ресторане может приготовить отличный обед, однако на каждом столе должны стоять соль и специи, чтобы каждый мог добавить их по вкусу.
Другой пример: инженеры разработали отличный контроллер, однако в реальных условиях может потребоваться настройка уровня входного управляющего сигнала, например, в соответствии с конкретным видом продукции.
Из этих примеров следует, что даже если удастся разработать хорошую общую стратегию управления, может возникнуть необходимость в её настройке с целью получения лучших практических результатов.
Алгоритмы обучения для параллельной схемы управления
Общая конфигурация управления показана на следующем рисунке.
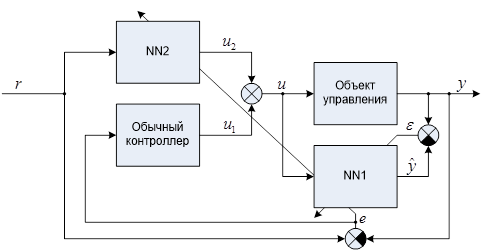
Рисунок. Нейроконтроллер параллельного типа с эмулятором
На этой схеме блок NN1 представляет собой нейронную сеть для эмулятора объекта управления, создающего оценку  выходной координаты объекта управления. Управляющий сигнал , представляющий собой выходной сигнал нейронной сети NN2, используется для коррекции управляющего сигнала
выходной координаты объекта управления. Управляющий сигнал , представляющий собой выходной сигнал нейронной сети NN2, используется для коррекции управляющего сигнала  , создаваемого обычным контроллером. Коррекция выполняется таким образом, чтобы обеспечить минимизацию рассогласования между опорным сигналом и выходом объекта управления.
, создаваемого обычным контроллером. Коррекция выполняется таким образом, чтобы обеспечить минимизацию рассогласования между опорным сигналом и выходом объекта управления.
Обозначим через  ошибку рассогласования между опорным сигналом и фактическим выходом . Необходимо обучить сеть NN2 таким образом, чтобы она могла минимизировать среднеквадратическую ошибку. Обозначим её через
ошибку рассогласования между опорным сигналом и фактическим выходом . Необходимо обучить сеть NN2 таким образом, чтобы она могла минимизировать среднеквадратическую ошибку. Обозначим её через  и определим в виде:
и определим в виде:
 .
.
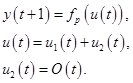
На нашем рисунке обозначает выход блока NN2. Предположим, что используется трёхслойная нейронная сеть, на вход которой поступает сигнал  , а на выходе появляется сигнал
, а на выходе появляется сигнал  . Кроме того, предположим, что объект управления имеет единичную временную задержку. Таким образом, получим:
. Кроме того, предположим, что объект управления имеет единичную временную задержку. Таким образом, получим:
Чтобы получить алгоритм обучения, применим метод наискорейшего спуска для минимизации ошибки . Получим:
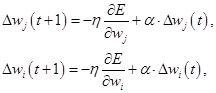
где  и
и  — скорость обучения и мгновенный член соответственно. Через
— скорость обучения и мгновенный член соответственно. Через  обозначен вес связи между
обозначен вес связи между  -м нейроном скрытого слоя и нейроном входного слоя, а через
-м нейроном скрытого слоя и нейроном входного слоя, а через  — вес связи между нейроном выходного слоя и
— вес связи между нейроном выходного слоя и  -м нейроном скрытого слоя.
-м нейроном скрытого слоя.
Обозначив
 ,
,
где
 ,
,
получим
 .
.
Используя сигмоидную функцию, отношение вход-выход для нейрона запишем в следующей форме:
А из отношения вход-выход для объекта управления получим:
{почему-то здесь те же уравнения, что чуть выше мы уже получали. Наверное, трудности перевода… 8-)}
Таким образом, получим:
Здесь использовалось равенство
 .
.
Если в качестве функции активации на выходном слое использовать отображение тождества, т.е.  , то получим
, то получим
 ,
,
где  обозначает то же самое, что
обозначает то же самое, что  , но при использовании отображения тождества в качестве функции активации нейронов.
, но при использовании отображения тождества в качестве функции активации нейронов.
Таким образом, имеем:

или
 .
.
Для -го элемента скрытого слоя имеем:
Определяя  как
как
 ,
,
получим
Используя цепное правило, получим:
 .
.
Таким образом, обучающее правило для узлов скрытого слоя запишем в виде:

Следовательно, правило нейронного управления для параллельной схемы можно задать в виде следующих шагов.
Шаг 1. Установить начальные значения , ,  ,
,  , и . Установить
, и . Установить  и перейти к шагу 2.
и перейти к шагу 2.
Шаг 2. Подать опорный (желаемый входной) сигнал на вход нейронной сети. Вычислить или по формуле:

или
 ,
,
где
 .
.
Шаг 3. Изменить веса связей:
или
.
Шаг 4. Вычислить или  по формуле:
по формуле:
или
 .
.
Шаг 5. Изменить веса связей на следующую величину:

или
 .
.
Шаг 6.  и перейти к шагу 2.
и перейти к шагу 2.
Следует отметить, что в случае нейроконтроллера последовательного типа обучающее правило использует  . Это значение можно вычислить приближённо, используя численную разность или применяя сеть-эмулятор.
. Это значение можно вычислить приближённо, используя численную разность или применяя сеть-эмулятор.
СХЕМА НЕЙРОННОГО УПРАВЛЕНИЯ С САМОНАСТРОЙКОЙ
Схема нейронного управления с самонастройкой показана на рисунке:
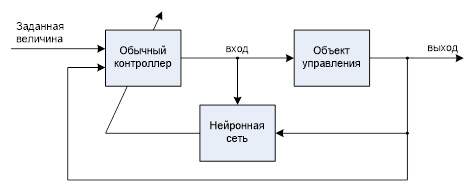
Рисунок. Схема нейронного управления с самонастройкой
Здесь нейронная сеть используется для настройки параметров обычного контроллера подобно настройке, выполняемой человеком-оператором.
Человек-оператор накапливает определённый опыт и знания о системе управления. Однако, в отличие от компьютера, человек-оператор не может помнить все данные о прошлом системы для всех видов рабочих состояний. Компьютер может легко хранить такую информацию и мгновенно отыскивать её. Таким образом, если удастся включить знания и опыт оператора в нейронную сеть и обучить её на основе данных о прошлом системы, то обученную таким образом сеть можно будет использовать как средство оперативной настройки параметров контроллера.
Такой подход может непосредственно применяться для многих традиционных технологий управления, включающих методы адаптивного управления. Многие методы адаптивного управления включают ряд параметров или задаваемых пользователем полиномиальных коэффициентов, которые требуется выбирать или настраивать предварительно. Обычно они выбираются методом проб или ошибок. Встроим в схему управления нейронную сеть, можно затем использовать эту сеть для оперативной настройки указанных параметров. Таким образом, стратегия нейронного управления с самонастройкой может применяться во многих традиционных технологиях управления.
Далее мы вспомним немного о ПИД-регуляторах.
ПИД-регуляторы
ПИД-регуляторы имеют давнюю историю в управлении промышленными объектами, они зарекомендовали себя как надёжные, простые и устойчивые средства для многих реальных приложений. В частности, в Японии доля ПИД-регуляторов составляет 84 % среди всех средств управления, применяемых на практике. Это, правда, старые данные, по состоянию на 1993 год.
Широкое распространение ПИД-регуляторов подтверждает, что они пригодны для многих практических задач благодаря простоте своей структуры и принципов работы.
Схема ПИД-управления приведена на рисунке:
Рисунок. Общая схема ПИД-регулятора
На этой схеме обозначены:
 — коэффициент пропорциональности,
— коэффициент пропорциональности,
 — постоянная интегрирования,
— постоянная интегрирования,
Обратите внимание на лекцию "Услуги, предоставляемые сетью".
 — постоянная дифференцирования.
— постоянная дифференцирования.
Эти параметры настраиваются в соответствии с желаемым выходным сигналом.
Управляющий входной сигнал ПИД-регулятора  задаётся выражением:
задаётся выражением:
 .
.
Переводя это на русский язык, пропорциональное действие связано с текущей ошибкой, интегрирующее — с предысторией ошибки, а дифференцирующее — с будущим поведением ошибки. С точки зрения оценивания, пропорциональное, интегрирующее и дифференцирующее действия соответствуют фильтрации, сглаживанию и прогнозированию соответственно.
Мы рассмотрели параллельную схему нейронного управления и схему нейронного управления с самонастройкой.


















