
Функции порождения
Лекция 11
4.6 Функции порождения для недетерминированных систем
Параметрически инвариантное ограничение на множество выборочных переменных может быть охарактеризовано разными способами. Простое описание, рассмотренное в разд. 3.3, может ограничиться заданием функции выбора, определенной на соответствующем множестве состояний. Хотя функция выбора является, вероятно, наиболее подходящим формальным аппаратом для задания ограничений в детерминированных системах, в которых порождение данных удобно описывать с помощью функции (4.20), для работы с недетерминированными системами функции выбора не годятся.
Традиционно с недетерминированными системами работают методами теории вероятностей. При этом основным понятием при описании ограничений на переменные является понятие вероятностной меры.
Из теории вероятностей хорошо известно, что любая вероятностная мера, скажем мера р, однозначно определяется функцией распределения
 , (4.21)
, (4.21)
При этом порождающая функция поведения  имеет вид
имеет вид
Рекомендуемые материалы
 ,(4.22)
,(4.22)
где  — условная вероятность при условии
— условная вероятность при условии  . Чтобы подчеркнуть, что задает условные вероятности, для обозначения вероятности
. Чтобы подчеркнуть, что задает условные вероятности, для обозначения вероятности  при заданном вместо используется стандартное обозначение
при заданном вместо используется стандартное обозначение  .
.
4.7 Направленные системы с поведением
До сих пор мы рассматривали только нейтральные системы с поведением (базовые и порождающие). Для описания их направленных аналогов необходимо разбить соответствующее множество выборочных переменных на два подмножества:
1) выборочные переменные, определяемые средой, т. е. входные переменные [переменные  , для которых
, для которых  ];
];
2) остальные выборочные переменные, связанные с рассматриваемой маской.
Эти два подмножества выборочных переменных можно определить, разбив заданную маску М на две подмаски. Пусть подмаска  определяет выборочные переменные, задаваемые средой, а подмаска
определяет выборочные переменные, задаваемые средой, а подмаска  — остальные. Тогда тройка
— остальные. Тогда тройка
 , (4.23)
, (4.23)
для которой справедливо, что
 (4.24)
(4.24)
определяет маску направленной системы с поведением.
D Согласно разбиения  на и множество
на и множество  идентификаторов выборочных переменных, определяемых М, разобьется на подмножества
идентификаторов выборочных переменных, определяемых М, разобьется на подмножества  и
и  . Кодирующая функция (3.6) будет заменена соответственно на две функции
. Кодирующая функция (3.6) будет заменена соответственно на две функции
 (4.25)
(4.25)
и будут определены следующие два множества состояний:
 (4.26)
(4.26)
необходимые для направленных систем. Функция поведения направленных систем имеет вид
 ,(4.27)
,(4.27)
где — это условная вероятность и, следовательно, вместо записи  можно использовать стандартную форму
можно использовать стандартную форму  . Теперь можно определить направленную систему с поведением как тройку
. Теперь можно определить направленную систему с поведением как тройку
 .(4.28)
.(4.28)
Порождающая функция поведения для направленных систем может быть введена с помощью разбиения на два подмножества  и
и  , соответствующих порождаемым и порождающим переменным. Делается это точно так же, как было описано для М. Таким образом, порождающая маска для направленных систем задается четверкой
, соответствующих порождаемым и порождающим переменным. Делается это точно так же, как было описано для М. Таким образом, порождающая маска для направленных систем задается четверкой
 ,(4.29)
,(4.29)
где  — это разбиение М. Снова определяются кодирующие функции (4.15), но
— это разбиение М. Снова определяются кодирующие функции (4.15), но  рассматривается теперь как разбиение . Множества
рассматривается теперь как разбиение . Множества  и
и  определяются формулами (4.16).
определяются формулами (4.16).
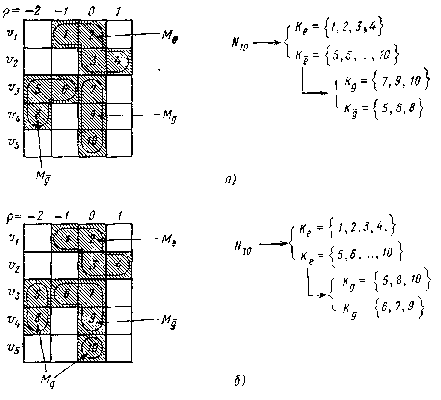
Рис. 4.4. Разбиения маски для направленной представляющей системы с полностью упорядоченным параметрическим множеством и  для обоих возможных порядков порождения данных
для обоих возможных порядков порождения данных
Теперь
 ,(4.30)
,(4.30)
где  — это условная вероятность, и, следовательно, в соответствии с традицией ее можно записать в виде
— это условная вероятность, и, следовательно, в соответствии с традицией ее можно записать в виде  . Для детерминированных систем можно переписать в более удобном виде
. Для детерминированных систем можно переписать в более удобном виде
 ,(4.31)
,(4.31)
Люди также интересуются этой лекцией: 5. Автоматизация добычных процессов.
который представляет собой направленный аналог порождающей функции поведения, определенной (4.20). Если предположить, что смысл определен, то направленная порождающая система с поведением определяется тройкой
 .(4.32) ▲
.(4.32) ▲
На рис. 4.4 показано разбиение маски на три подмаски ,, (и соответствующее разбиение идентификаторов выборочных переменных) в предположении, что  и
и  — это входные переменные. На рис. 4.4,а и б показаны два варианта, соответствующие порождению данных в порядке возрастания и убывания значений параметра.
— это входные переменные. На рис. 4.4,а и б показаны два варианта, соответствующие порождению данных в порядке возрастания и убывания значений параметра.
К.Р. № 11
Опишите функции поведения для недетерминированных направленных систем.



















