
Основы геометро-кинематического синтеза механизмов с высшими кинематическими парами
Лекция N13
Основы геометро-кинематического синтеза механизмов с высшими кинематическими парами.
В предыдущих лекциях рассматривались задачи синтеза механизмов с низшими парами. Эти пары обеспечивают передачу значительных сил, так как звенья пары обычно соприкасаются по поверхности. Но условие постоянного соприкосновения звеньев по поверхности ограничивает число возможных видов низших пар.
Значительно большие возможностями для воспроизведения почти любого закона движения имеют механизмы с высшими кинематическими парами, так как условие касания взаимодействующих поверхностей звеньев высшей пары по линиям и точкам могут быть выполнены бесчисленным множеством различных поверхностей.
Механизмы с высшими кинематическими парами обладают, по крайней мере, тремя существенными достоинствами в сравнении с механизмами, содержащими только низшие кинематические пары:
· во-первых, они могут воспроизводить любой заданный закон движения теоретически точно;
· во-вторых, для реализации одного и того же закона движения может быть использован более простой по структуре механизм, содержащий меньшее количество звеньев и кинематических пар;
· в-третьих, механизмы с высшими кинематическими парами могут быть менее чувствительными к погрешностям изготовления и монтажа как в отношении точности воспроизведения заданного закона движения, так и в отношении нагрузочной способности.
При воспроизведении возвратного движения можно иметь одну пару сопряжённых профилей (поверхностей). Если же требуется воспроизвести непрерывное движение в одном направлении, то надо иметь несколько последовательно взаимодействующих пар сопряжённых поверхностей, которые располагаются на выступах, называемых зубьями.
Рекомендуемые материалы
К механизмам с высшими кинематическими парами относятся:
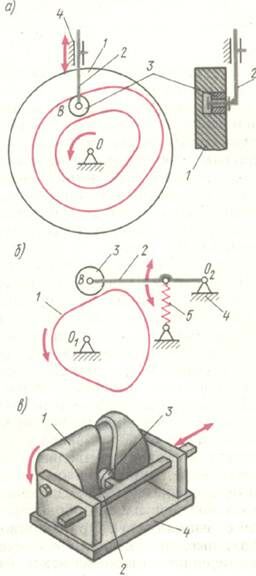
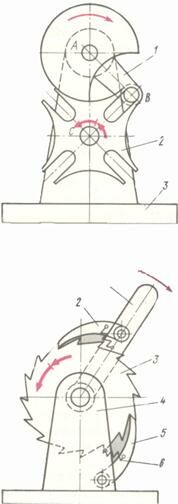
1. Кулачковые механизмы (рис. 13.1)
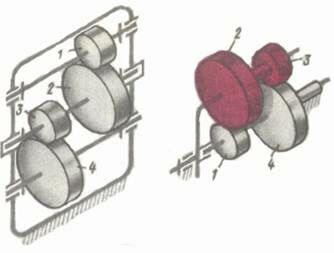
2. Фрикционные механизмы (в том числе и планетарные) (рис. 13.2)
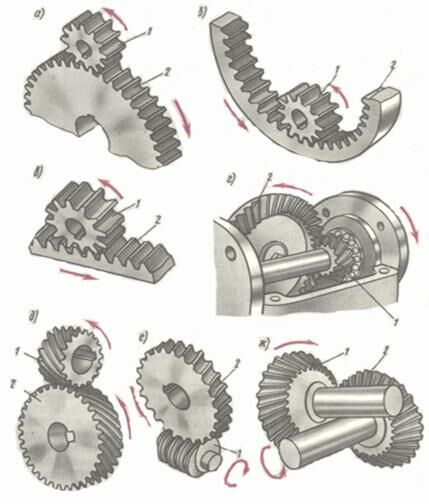
3. Зубчатые передачи с неподвижными осями (рис. 13.3)
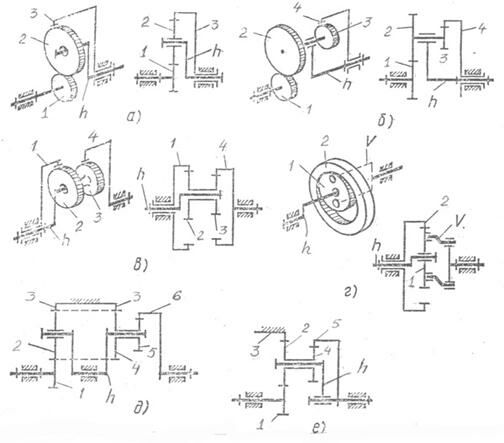
4. Планетарные механизмы, в которых хотя бы одно звено имеет подвижную ось в пространстве (рис. 13.4, а-е)
5. Мальтийские механизмы и другие механизм прерывистого действия (рис. 13.5, а, б)
![]()
![]()
Синтез зацепления состоит в отыскивании сопряжённых поверхностей по заданному закону их относительного движения. Для решения этой задачи используется основная теорема зацепления, устанавливающая связь между геометрией профилей (сопряженных поверхностей) и заданным законом их относительного движения.
Взаимодействующие поверхности звеньев высшей пары, обеспечивающие заданный закон их относительного движения, называется сопряжёнными поверхностями.
![]()
Сопряжённые поверхности долж-ны быть выбраны так, чтобы в любой точке их контакта общая нормаль к ним была перпендикулярна вектору скорости точки контакта в заданном относительном движении поверх-ностей.
В аналитическом виде условие основной теоремы зацепления записывается как условие перпендикулярности векторов:
![]()
где ![]() - орт нормали в точке контакта.
- орт нормали в точке контакта.
Теорема доказывается «от противного». Если условие теоремы не выполнено, т.е. общая нормаль n-n к выбранным поверхностям не перпендикулярна относительной скорости Vотн., то имеется составляющая этой скорости, направленная по общей нормали, и, следовательно, происходит либо отрыв одной поверхности от другой, либо вдавливание, что невозможно.
В общем случае контакт поверхностей может происходить в нескольких точках и по линиям (линейчатый контакт). При этом условие основной теоремы зацепления должно быть выполнено во всех точках контакта.
Зацепление, в котором оба звена совершают плоское движение, параллельное одной и той же неподвижной плоскости, называется плоским. Для плоского зацепления вместо сопряжённых поверхностей можно рассматривать сопряжённые профили, т.е. кривые получаемые в сечении сопряжённых поверхностей плоскостью, параллельной плоскости движения.
Мгновенный центр вращения в относительном движении звеньев плоского зацепления принято называть полюсом зацепления. Относительная скорость точки контакта профилей перпендикулярна радиусу-вектору, соединяющему эту точку с полюсом зацепления.
Основная теорема плоского зацепления.
Общая нормаль в контактной точке сопряжённых профилей проходит через полюс зацепления и делит линию центров на части, обратно пропорциональные угловым скоростям.
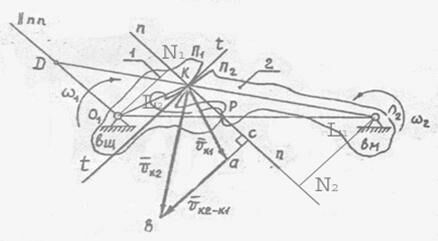
На рис. 13.6 показан общий случай взаимодействия двух плоских звеньев с произвольными, но сопряжёнными профилями. Они должны иметь общую нормаль n-n и общую касательную ![]() . Общая нормаль пересекает линию центров в точке P, называемой полюсом зацепления. Точку «К» можно рассматривать как две слитные точки К1 и К2, принадлежащие соответственно профилям первого и второго звеньев.
. Общая нормаль пересекает линию центров в точке P, называемой полюсом зацепления. Точку «К» можно рассматривать как две слитные точки К1 и К2, принадлежащие соответственно профилям первого и второго звеньев.
![]() (13.1)
(13.1)
![]() 2 можно определить, используя условие существования высшей кинематической пары.
2 можно определить, используя условие существования высшей кинематической пары.
![]()
т.е. равенство проекций скоростей на общую нормаль, обеспечивающее непрерывность контакта. Проецируя V1 и V2 на общую касательную получим: V1![]()
![]() V2
V2![]() . Это означает что контакт профилей осуществляется со скольжением.
. Это означает что контакт профилей осуществляется со скольжением.
![]() (13.2)
(13.2)
Установим связь между ![]() и
и ![]() :
:
![]() (13.3)
(13.3)
Из подобия треугольников![]() O1N1P и
O1N1P и ![]() O2N2P имеем:
O2N2P имеем:
![]() (13.4)
(13.4)
Отсюда имеем: ![]() – эта зависимость для внешнего зацепления.
– эта зависимость для внешнего зацепления.
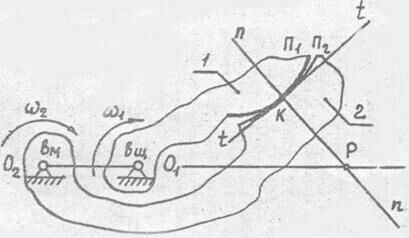
У внутреннего заце-пления (рис 13.6 б) направление ![]() и
и ![]() одинаковы, поэтому зависимость (13.4) имеет вид:
одинаковы, поэтому зависимость (13.4) имеет вид: ![]()
А в общем виде:
![]() (13.5)
(13.5)
Скорость скольжения профиля.
Скорость скольжения профилей в высшей кинематической паре равна произведению скорости относительного вращения на расстояние от контактной точки до полюса зацепления:
![]() (13.6)
(13.6)
Для внутреннего зацепления ![]()
В полюсе зацепления lKP = 0 и следовательно скорость скольжения равна нулю Vck = 0 , т.е. профили перекатываются без скольжения.
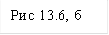
В случае цилиндрических передач рассматривают:
![]() а) Внешнее зацепление
а) Внешнее зацепление
![]()
![]()
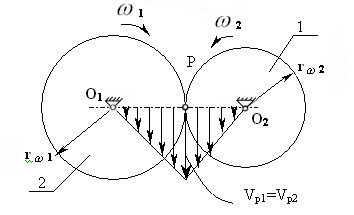
б) Внутреннее зацепление
![]()
Vp = Vp1 = Vp2
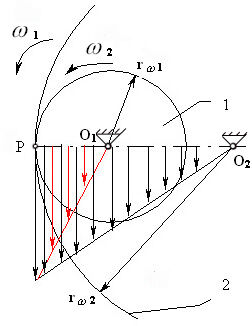
![]() в) Зацепление реечное
в) Зацепление реечное
Рис 13.7
Vp2 = Vp1 = ![]() 1
1 ![]() rw1
rw1
Ввиду ограниченности объема курса предметом дальнейшего изучения будут прямозубые и эвольвентные косозубые зубчатые передачи, у которых u = const. Геометрию таких колёс передачи определяют эвольвента окружности.
Эвольвента окружности и её свойства и уравнение.
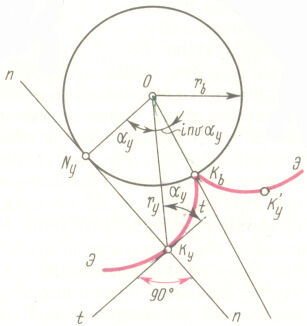
Эвольвентой окружности называется кривая, описываемая любой точкой прямой линии при перекатывании её без скольжения по окружности. При этом прямая линия называется производящей прямой, а окружность – основной окружностью.
Текущий радиус-вектор точки Ky эвольвенты обозначим через ry.
Начальный радиус-вектор этой кривой равен радиусу rb основной окружности.

![]() Угол
Угол ![]() y называется углом профиля.
y называется углом профиля.
Угол, образованный началь-ным радиус-вектором эвольвенты OKв и её текущим радиусом OKy называется углом развёрнутости эвольвенты или эвольвентным углом.
По построению эвольвенты имеем:
KвNy = KyNy , подставив в это выражение значение дуги и отрезка получим:
![]() откуда
откуда ![]() (13.8)
(13.8)
Это уравнение выражает функциональную зависимость между углами inv![]() y и
y и ![]() y, измеренных в радианах.
y, измеренных в радианах.
Связь между ry, rb и ![]() y устанавливается из
y устанавливается из ![]() KyONy зависимостью:
KyONy зависимостью:
![]() (13.9)
(13.9)
Для геометрической теории зацепления важное значение имеют следующие свойства эвольвенты:
1. Эвольвента – симметричная кривая с двумя ветвями, сходящимися в точке Kв, которая лежит на основной окружности.
2. Эвольвента не имеет точек внутри основной окружности
3. Форма эвольвенты зависит только от радиуса основной окружности. При увеличении радиуса rb радиус кривизны эвольвентного профиля постепенно увеличивается при rb = ![]() эвольвента преобразуется в прямую.
эвольвента преобразуется в прямую.
4. Нормаль к любой точке эвольвенты направлена по касательной к основной окружности.
5. Центр кривизны эвольвенты лежит в точке касания нормали с основной окружностью.
Эвольвентное зацепление.
Пусть профиль зуба звена 1 очерчен по эвольвенте основной окружности радиуса rb1, а профиль зуба звена 2 по эвольвенте окружности rb2. Центры вращения этих окружностей O1 и О2. Приведём в соприкосновение эвольвенты Э1 и Э2 в точке «К» (рис. 13.9)
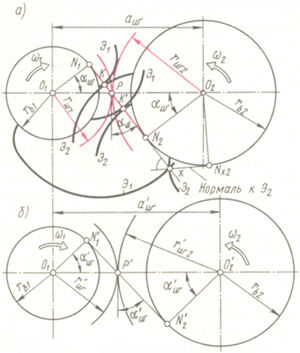
Нормаль к Э1 – является касательной к окружности радиусом rb1.
 Нормаль к Э2 – является касательной к окружности rb2. Т.к. в точке К эвольвенты касаются друг друга, то и линии N1K и KN2, а следовательно и N1N2 является общей нормалью к эвольвентам Э1 и Э2, т.к. профили являются сопряжёнными.
Нормаль к Э2 – является касательной к окружности rb2. Т.к. в точке К эвольвенты касаются друг друга, то и линии N1K и KN2, а следовательно и N1N2 является общей нормалью к эвольвентам Э1 и Э2, т.к. профили являются сопряжёнными.
Рассматривая новое положение эвольвент Э1’ и Э2’ приходим к аналогичному выводу.
Таким образом, линию N1N2 можно рассматривать как геометрическое место точек касания сопряженных профилей. В процессе зацепления, т.е. смены точек контакта прямая N1N2 не меняет своего положения. Этим доказывается первое существенное свойство эвольвентного зацепления.
1. Эвольвентное зацепление обеспечивает постоянство передаточного отношения в процессе зацепления, т.е.:
![]()
Точка пересечения общей нормали к эквивалентам с межосевой линией (полюс зацепления Р) занимает неизменное положение.
Центроиды в относительном движении звеньев представляют собой окружности. Эти окружности называются поллоидными или для плоского зацепления начальными.
По свойству центроид начальные окружности с радиусами rw1 и rw2 перекатываются без скольжения.
![]()
Угол ![]() w – угол между линией зацепления и прямой, перпендикулярной межосевой линии называется углом зацепления.
w – угол между линией зацепления и прямой, перпендикулярной межосевой линии называется углом зацепления.
![]()
![]()
![]()
2. Из этих формул и рис. 13.9, б, видно, что изменение межосевого расстояния аw = rw1+ rw2 не влияет на величину передаточного отношения вследствие неизменности размеров основных окружностей.
![]()
3. При внешнем зацеплении эвольвентные профили являются сопряжёнными только в пределах линии зацепления N1N2.
Эвольвенты Э1 и Э2, проходящие через точку х, расположенную вне участка N1N2 ниже точки N2 (рис 13.9, а) не имеют общей нормали. Это означает, что эвольвенты в точке х не касаются, а пересекаются. То же произойдет выше точки N1 вне участка линии зацепления N1N2.
Контрольные вопросы к лекции N13.
1. Что называется внешней кинематической парой?
2. Назовите известные Вам механизмы с высшими кинематическими парами?
3. Как записывается условие существование высшей кинематической пары?
Вам также может быть полезна лекция "Материальная культура".
4. Дайте определение основной теоремы зацепления.
5. Дайте определение линии зацепления в эвольвентной передаче.
6. Сформулируйте основные свойства эвольвенты.
7. Запишите уравнения описывающее эвольвенту
8. Что называется эвольвентной зубчатой передачей?
9. Изменяется ли передаточное отношение эвольвентной передаче при уменьшении межосевого расстояния?


















