
Синтез адаптивного управления с ПИ-регулятором
Синтез адаптивного управления при помощи ПИ- регулятора
Пусть динамика нестационарного объекта управления описывается передаточной функцией вида:
 .
.
Требуется спроектировать схему управления объектом при нестационарности задающего воздействия g, при нестационарности параметров объекта k и a. Найти функцию управления объектом, позволяющую поддерживать качество управления на заданном уровне, обеспечивая выполнение условий:
| s Y(s) - g | s=0 £  ,
,
s Î W, (h = 2, m £1).
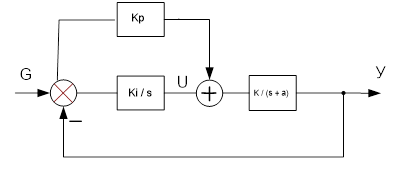
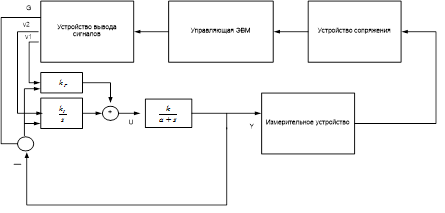
Выберем ПИ- регулятор. Введем в рассмотрение два вектора х = (kp, ki),
p = (k, a). Схема регулятора имеет вид:
Рекомендуемые материалы
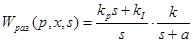

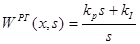
Запишем характеристическое уравнение САР в параметрической форме:
 .
.
Зададим эталоную САР через расположение корней характеристического уравнения:  , уравнение примет вид:
, уравнение примет вид:
s2 + 5 s + 6 = 0.
Составим целевую функцию:
 .
.
Последнее слагаемое характеризует статическую ошибку, учитывая, что величина статической ошибки должна подчиняться условию:
| s Y(s) – g| £, (s = 0).
Параметры регулятора определятся из уравнений:

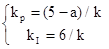
По сути это есть зависимость x = x(k, a). Таким образом, сигналы, подаваемые ЭВМ на регулятор будут формироваться в соответствии с законом:
V(tm) = х (a, k, tm) - х (a, k, tm-1)).
V 1(tm) = ,
,
V2(tm) = .
.
Бесплатная лекция: "Закон Республики Узбекистан «О гражданской защите» " также доступна.
Схема 1 системы адаптивного управления примет вид:
Рассмотрим процедуру синтеза закона управления для схемы 2 адаптивного управления, воспользовавшись полученной ранее формулой (4.6) при f = 0.

Поскольку управляющее воздействие должно вырабатываться только по завершению переходного процесса, положим s = 0, тогда
 .
.


















