
Абсолютное, относительное и переносное движения точки
СЛОЖНЫЕ ДВИЖЕНИЯ ТОЧКИ
§ 1. Абсолютное, относительное и переносное движения точки
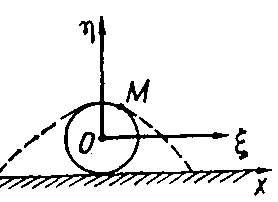
В ряде случаев приходится рассматривать движение точки по отношению к системе координат О1ξηζ, которая, в свою очередь, движется по отношению к другой системе координат Охуz условно принятой в качестве неподвижной. В механике каждую из указанных систем координат связывают с некоторым телом. Например, рассмотрим качение без скольжения колеса вагона по рельсу. С рельсом свяжем неподвижную систему координат Аху, а подвижную систему Oξη свяжем с центром колеса и предположим, что она движется поступательно. Движение точки на ободе колеса является составным или сложным.
Введем следующие определения:
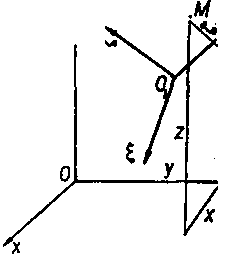
1. Движение точки относительно системы координат Охуz (рис. 53) называется абсолютным.
2. Движение точки относительно подвижной системы координат O1ξηζ называется населенным.
3. Переносным движением точки называют движение той точки тела, связанного с подвижной системой координат О1 ξηζ, относительно неподвижной системы координат, с которой в данный момент совпадает рассматриваемая движущаяся точка.
Таким образом, переносное движение вызвано движением подвижной системы координат по отношению к неподвижной. В приведенном примере с колесом переносное движение точки обода колеса обусловлено поступательным движением системы координат О1 ξηζ по отношению к неподвижной системе координат Аху.
Рекомендуемые материалы
Уравнения абсолютного движения точки получим, выразив координаты точки х, у,z как функции времени:
х=х(t), у = у(t), z = z(t).
Уравнения относительного движения точки имеют вид
ξ = ξ (t), η = η (t), ζ = ζ (t).
В параметрической форме уравнения (11.76) выражают уравнения абсолютной траектории, а уравнения (11.77) — соответственно уравнения относительной траектории.
Различают также абсолютную, переносную и относительную скорость и соответственно абсолютное, переносное и относительное ускорения точки. Абсолютную скорость обозначают υa, относительную — υr, переносную — υе Соответственно ускорения обозначают: ωа, ωr и ωе.
Основной задачей кинематики сложного движения точки является установление зависимости между скоростями и ускорениями точки в двух системах координат: неподвижной и подвижной.
Для доказательства теорем о сложении скоростей и ускорений в сложном движении точки введем понятие о локальной или относительной производной.
Теорема о сложении скоростей
Теорема. При сложном (составном) движении точки ее абсолютная скорость υa равна векторной сумме относительной υr и переносной υе скоростей.
Пусть точка М совершает одновременные движения по отношению к неподвижной и подвижной системам координат (рис. 56). Обозначим угловую скорость поворота системы координат Оξηζ через ω. Положение точки М определяется радиусом-вектором r.
Установим соотношение между скоростями точки М по отношению к двум системам координат — неподвижной и подвижной. На основании доказанной в предыдущем параграфе теоремы
Из кинематики точки известно, что первая производная от радиуса-вектора движущейся точки по времени выражает скорость этой точки. Поэтому  = r = υа — абсолютная скорость,
= r = υа — абсолютная скорость,  =υr — относительная скорость,
=υr — относительная скорость,
а ω x r = υе — переносная скорость точки М. Следовательно,
Вместе с этой лекцией читают "Бумын-каган, Молдо Кылыч, М. Аммосов".
υа= υr+ υе
Формула (11.79) выражает правило параллелограмма скоростей. Модуль абсолютной скорости найдем по теореме косинусов:
υa=
В некоторых задачах кинематики требуется определить относительную скорость υr. Из (11.79) следует
υr= υа+( - υе ).
Таким образом, чтобы построить вектор относительной скорости, нужно геометрически сложить абсолютную скорость с вектором, равным по абсолютной величине, но противоположно направленным переносной скорости.


















