
Скорости точек тела, вращающегося вокруг неподвижной оси. Формула Эйлера
Скорости точек тела, вращающегося вокруг неподвижной оси. Формула Эйлера
Скорость любой точки тела, вращающегося вокруг неподвижной оси, называется линейной. Заметим, что скорости точек на ободе маховика или вращающегося диска называются также окружными скоростями.
Так как движение точки в этом случае движения тела задано естественным образом, то величина линейной скорости будет равна
υ=|s| = R|φ|,
или
υ =Rω.
Следовательно, линейная скорость точки тела, вращающегося вокруг неподвижной оси, по величине равна произведению радиуса вращения на величину угловой скорости. Линейная скорость направлена по касательной к окружности в сторону вращения и, таким образом, перпендикулярна радиусу вращения R (рис 50).
Покажем, что линейная скорость точки тела, вращающегося вокруг неподвижной оси, равна векторному произведению угловой скорости тела на радиус-вектор точки.
Действительно, пусть тело вращается вокруг неподвижной оси против часовой стрелки. Тогда вектор угловой скорости ω будет направлен в положительную сторону оси вращения Оz,. Положение рассматриваемой точки тела определим радиусом-вектором r. Радиус вращения R будет равен
Рекомендуемые материалы
R = r sin (ω^r).
Подставляя в (11.67), получим
υ = ωr sin (ω^r).
Следовательно, модуль линейной скорости будет равен модулю векторного произведения векторов ω и r. Очевидно далее, что направление линейной скорости точки υ совпадает с направлением векторного произведения ω x r. Это непосредственно вытекает из определения векторного произведения двух векторов ω и r. Таким образом, линейная скорость точки равна векторному произведению векторов ω и r, т. е.
υ= ω х r.
Эта формула называется формулой Эйлера.
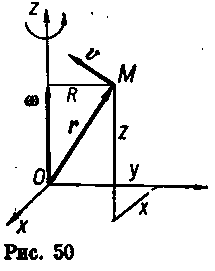
Выбрав оси координат, как указано на рис. 50, установим формулы для проекций линейной скорости на оси координат, как проекций векторного произведения.
υx=ωyrz - ωzry
υy=ωzrx - ωxrz
υz=ωxry - ωyrx
где rх = х, ry = у, rz = z, ωx= 0, ωу = 0, ωz = ω;
Вам также может быть полезна лекция "1.3 Предпосылки образования государства".
х, y, z — координаты точки М.
Окончательно получим
υx = — ωy,
υy = ωx,
υz =0.



















