
Типы электроприводов и движения, осуществляемые ими
2. Типы электроприводов и движения, осуществляемые ими
Автоматизированный электропривод – электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенных для приведения в движение исполнительных органов рабочей машины и управления этим движением.
Одна из возможных структурных схем автоматизированного электропривода представлена на рис.1.
В структурной схеме можно выделить три основных элемента:
1) Механическая часть силового канала электропривода, включающая рабочий механизм РМ, передаточное устройство МП, предназначенное для передачи механической энергии от двигателя (электромеханического преобразователя ЭМП) к исполнительному органу РМ;
2) Электрическая часть силового канала, предназначенная для преобразования электрической энергии в механическую или механической энергии в электрическую. Электрическая часть силового канала включает различные типы двигателей, а также электрические и электромеханические преобразователи.
Основными типами двигателей, применяемых в электроприводе, являются:
- двигатели постоянного тока;
- асинхронные двигатели с короткозамкнутым и фазным ротором;
Рекомендуемые материалы
- синхронные двигатели;
- линейные двигатели;
- Вентильные и др.
Электрические преобразователи:
- генератор постоянного тока;
- тиристорный преобразователь;
- преобразователь частоты;
- широтно-импульсный преобразователь;
- тиристорный регулятор напряжения переменного тока и др.
3)Информационный канал электропривода, состоящий из преобразователя, управляющего устройства, задающего устройства ЗУ и датчиков обратных связей. Преобразователь ЭП предназначен для питания двигателя и создания управляющего воздействия на него. Он преобразует род тока, напряжение, частоту. Управляющее устройство, получая командные сигналы от ЗУ, управляет преобразователем ЭП. Информация о текущем состоянии электропривода и технологического процесса получается от датчиков обратных связей. С помощью их величины I, U, w, M, F, S –преобразуются в пропорциональные этим параметрам электрические сигналы, которые подаются в управляющее устройство.
Электропривод взаимодействует с системой электроснабжения или источником электрической энергии с одной стороны и с технологической установкой, с другой стороны. Кроме того, электропривод может быть связан также с информационными системами и системами управления более высокого уровня, например АСУТП производства. Если вычислительная техника и системы управления являются «мозгом» современной технологии, то электропривод является её «мышцами».
Диапазон мощностей электропривода очень широк – от долей ватта – до десятков мегаватт. Диапазон по частоте вращения – от 1 оборота за несколько часов – до 150000 об/мин, напряжение определяется номинальным напряжением применяемых двигателей. Безгранично широк диапазон областей применения электроприводов (от бытовых установок, до мощных производственных механизмов и космических аппаратов, управляемых на расстоянии в миллионы километров).
Электропривод является также основным потребителем электрической энергии – примерно 60-70% всей вырабатываемой электроэнергии.
Общие требования к электроприводу:
- надежность – обеспечение нормальных функций в течении длительного времени;
- точность регулирования (точное обеспечение скорости, положения, остановки, моментов), обеспечение стабильных параметров движения;
- быстродействие;
- качество динамических показателей;
- энергетическая эффективность (КПД и затраты электрической энергии);
- совместимость электропривода с системой электроснабжения, особенно в электроприводах большой мощности;
- ресурсоёмкость, материалоёмкость, энергоёмкость.
Система электроснабжения

 ТР - трансформатор;
ТР - трансформатор;
ЭП – электрический преобразователь;
ЭМП – электромеханический преобразователь (двигатель);
МП – механическая передача.
Все многообразие электроприводов можно разделить на три группы:
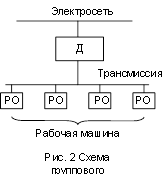
1) групповой - обеспечивает движение наполнительных органов нескольких рабочих машин или нескольких исполнительных органов одной рабочей машины (трансмиссионный).
 Недостатком такого типа привода являются громоздкие механический связи, усложняющие конструкцию машины.
Недостатком такого типа привода являются громоздкие механический связи, усложняющие конструкцию машины.
2) индивидуальный – движение каждого механизма обеспечивается своим двигателем. Преимущество: улучшаются условия работы, повышается производительность работы, обеспечиваются более высокие энергетические показатели и оптимальный режим работы, лучшее резервирование, упрощаются механические передачи, повышается точность работы.
3) взаимосвязанный – содержит два или несколько электрически или механически связанных между собой электродвигательных устройств (или электроприводов), при работе которых поддерживается заданное, соотношение или равенство скоростей или нагрузок, или положение исполнительных органов рабочих машин. В качестве примера можно назвать электропривод цепного конвейера, станков с программным управлением, бумагоделательных машин и д.р.
 Разновидность взаимосвязанного электропривода – многодвига-тельный электропривод – это электропривод, двигательные устройства которого совместно работают на общий вал. Пример: привод поворота мощного экскаватора.
Разновидность взаимосвязанного электропривода – многодвига-тельный электропривод – это электропривод, двигательные устройства которого совместно работают на общий вал. Пример: привод поворота мощного экскаватора.
По степени управляемости электропривод может быть:
1) нерегулируемый – для приведения в действие исполнительного органа рабочей машины с одной рабочей скоростью, параметры привода изменяются только в результате возмущающих воздействий;
2) регулируемый – для сообщения изменяемой или неизменяемой скорости исполнительному органу машины, параметры привода могут изменяться под воздействием управляющего устройства;
3) программно- управляемый – управляемый в соответствии с заданной программой;
4) следящий – автоматически отрабатывающий перемещение исполнительного органа рабочей машины с определенной точностью в соответствии с произвольно- меняющимся задающим сигналом;
5) адаптивный – автоматически избирающий структуру или параметры системы управления при изменении условий работы машины с целью выработки оптимального режима.
По роду передаточного устройства:
Рекомендуем посмотреть лекцию "83 Приготовление первых блюд".
1) редукторный, в котором двигатель передает вращательные движения передаточному устройству, содержащему редуктор;
2) безредукторный, в котором осуществляется передача движения от двигателя либо непосредственно рабочему органу, либо через передаточное устройство, не содержащее редуктор.
По уровню автоматизации:
1) неавтоматизированный – электропривод, в котором управление ручное, в настоящее время такой привод встречается редко (бытовая медтехника и др.);
2) автоматизированный - управляемый автоматическим регулированием параметров;
3) автоматический – в котором управляющее воздействие вырабатывается автоматическим устройством без участия оператора.


















