


Искусственные механические характеристики двигателя независимого возбуждения
2.4 Искусственные механические характеристики двигателя независимого возбуждения
Характеристики, соответствующие изменяемым параметрам двигателя ( ) или специальным схемам его включения, принято называть искусственными характеристиками двигателя.
) или специальным схемам его включения, принято называть искусственными характеристиками двигателя.
2.4.1 Реостатные характеристики
Реостатные характеристики могут быть получены, при включении в цепь якоря добавочных сопротивлений  , т.е.
, т.е.
 .
.
Уравнения реостатных механических характеристик будет иметь вид:

где  - скорость идеального холостого хода
- скорость идеального холостого хода
 - перепад скорости относительно скорости идеального холостого хода двигателя.
- перепад скорости относительно скорости идеального холостого хода двигателя.
Рекомендуемые материалы
Следовательно
 . (2.26)
. (2.26)
 .
.
Модуль жесткости реостатных характеристик
 . (2.27)
. (2.27)
Cкорость идеального холостого хода при работе на искусственных характеристиках остаётся неизменной, т.е.
 .
.
Однако перепад скорости оказывается пропорциональным величине добавочного сопротивления (рис. 2.7)
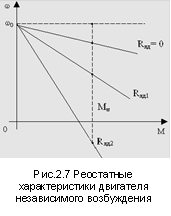
Следовательно, включение дополнительных сопротивлений  в цепь якоря снижает жесткость механических характеристик.
в цепь якоря снижает жесткость механических характеристик.
Кроме того, при этом снижается также ток якоря двигателя:
 , (2.28)
, (2.28)
что позволяет использовать эти сопротивления при пуске и регулировать скорость двигателя.
2.4.2 Механические характеристики при 
Обычно рабочая точка двигателя независимого возбуждения, соответствующая номинальному магнитному потоку находится “за коленом кривой намагничивания машины” (рис. 2.8). Поэтому увеличение магнитного потока выше номинального значения на практике не применяется из – за значительного повышения тока возбуждения при этом и перегрева этой обмотки.
 Поэтому используется обычно ослабление магнитного потока с целью расширения регулировочных возможностей двигателя. Уравнение механической характеристики при этом:
Поэтому используется обычно ослабление магнитного потока с целью расширения регулировочных возможностей двигателя. Уравнение механической характеристики при этом:
 . (2.29)
. (2.29)
 Скорость идеального холостого хода
Скорость идеального холостого хода  и перепад скорости
и перепад скорости  при этом определяется
при этом определяется

 Следовательно, уменьшение магнитного потока вызывает увеличение скорости и увеличение перепада скорости (рис.2.9)
Следовательно, уменьшение магнитного потока вызывает увеличение скорости и увеличение перепада скорости (рис.2.9)
Жесткость механических характеристик снижается при ослаблении магнитного потока:
 . (2.30)
. (2.30)
Следует иметь в виду, что при постоянном значении допустимого тока  , допустимый момент двигателя снижается при ослаблении магнитного потока двигателя. Аналогично величина тока короткого замыкания не зависит от магнитного потока
, допустимый момент двигателя снижается при ослаблении магнитного потока двигателя. Аналогично величина тока короткого замыкания не зависит от магнитного потока  . В это же время момент короткого замыкания пропорционален этому потоку:
. В это же время момент короткого замыкания пропорционален этому потоку:
 . (2.31)
. (2.31)
Для современных машин диапазон увеличения скорости при ослаблении магнитного потока обычно указывается в каталогах. Например, для машин серии 2П он составляет  . Меньшие значения скорости
. Меньшие значения скорости  соответствуют быстроходным двигателям.
соответствуют быстроходным двигателям.
Для специальных двигателей диапазон увеличения скорости может достигнуть  .
.
Расчет добавочных сопротивлений, включаемых в цепь возбуждения для получения необходимого ослабления поля двигателя, производится с использованием кривой намагничивания, указываемой в специальных справочниках. При их отсутствии ориентировочно можно пользоваться данными универсальной кривой намагничивания для двигателей независимого возбуждения (табл. 2.1).
Таблица 2.1
|
| 0,05 | 0,2 | 0,375 | 0,65 | 0,82 | 0,87 | 0,92 | 1,0 | 1,05 |
|
| 0 | 0,1 | 0,4 | 0,6 | 0,6 | 0,7 | 0,8 | 1,0 | 1,2 |


При этом номинальные значения  и
и  могут быть найдены по каталогам.
могут быть найдены по каталогам.
2.4.3 Механические характеристики при 
Изменения напряжения  в регулируемом электроприводе – основное управляющее воздействие. Как правило, напряжение уменьшается по сравнению с номинальным значением. Не допускается повышения напряжения сверх номинального значения. Однако ряд крановых металлургических двигателей серии 2П рассчитаны на возможную работу с напряжением
в регулируемом электроприводе – основное управляющее воздействие. Как правило, напряжение уменьшается по сравнению с номинальным значением. Не допускается повышения напряжения сверх номинального значения. Однако ряд крановых металлургических двигателей серии 2П рассчитаны на возможную работу с напряжением  (но это исключение из общего правила). Уравнения механической характеристики
(но это исключение из общего правила). Уравнения механической характеристики
 . (2.32)
. (2.32)
Скорость идеального холостого хода пропорциональна напряжению на зажимах двигателя:
 .
.
Ещё посмотрите лекцию "5 Выпрямительные диоды" по этой теме.
Перепад скорости в этом случае находится
 ,
,
 следовательно, механические характеристики в этом случае будут параллельны друг другу (рис.2.10)
следовательно, механические характеристики в этом случае будут параллельны друг другу (рис.2.10)
Жесткость механических характеристик постоянна:
 .
.
Характеристика, соответствующая напряжению  проходит через начало координат.
проходит через начало координат.


















