
Аэродинамические характеристики самолетных винтов
Лекция 14
Тема 4. Аэродинамические характеристики самолетных винтов
4.1. Геометрические и кинематические характеристики воздушных винтов.
4.1.1. Назначение и типы воздушных винтов. Основные геометрические параметры.
Воздушным винтом называется вращающееся лопастное устройство, предназначенное для создания тяги за счет реакции отбрасываемой назад массы воздуха, проходящей через плоскость его вращения.
Воздушные винты по конструктивным особенностям подразделяются на дозвуковые ( применяются на ЛА с малыми скоростями полета и обтекаются во всех сечениях лопастей на всех режимах с дозвуковыми скоростями) и сверхзвуковые (применяются на самолетах с околозвуковыми скоростями полета и обтекаются на крейсерском режиме в большинстве сечений лопастей со сверхзвуковыми скоростями).
Винты могут быть фиксированного шага или изменяемого шага.
Подразделяются винты также на одиночные и соосные.
К основным геометрическим параметрам воздушных винтов относятся:
Рекомендуемые материалы
-диаметр D;
-радиус R;
-радиус сечений r;
-относительный радиус сечения  =r/R;
=r/R;
-число лопастей i;

 -угол установки сечения
-угол установки сечения  -угол между хордой сечения и плоскостью вращения винта.
-угол между хордой сечения и плоскостью вращения винта.
Рис.4.1
-угол установки лопасти -  - угол установки сечения на =0,75
- угол установки сечения на =0,75
-крутка лопасти кр, характеризует изменение угла установки сечений по длине лопасти, отсчитывается от угла установки лопасти
 =r-
=r-
-форма лопасти в плане - сужающиеся к концам;
и их разновидность - саблевидные или веслообразные.
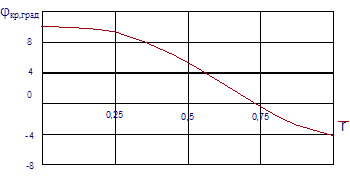 |
Рис.4.2
4.1.2. Кинематические характеристики винта
Кинематические характеристики (параметры) воздушного винта определяют его движение, состоящее из вращательного и поступательного.
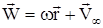
Вращательное движение характеризуется окружной скоростью сечения  r, а поступательное - скоростью полета V ¥ . Полная скорость обтекания сечения
r, а поступательное - скоростью полета V ¥ . Полная скорость обтекания сечения
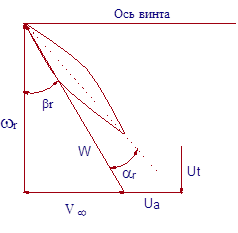 |
Рис.4.3
Строго говоря, названные скорости отличаются от указанных значений на величины осевой индуктивной скорости Ua ( за счет отбрасывания воздуха винтом) и окружной индуктивной скорости Ut ( за счет закручивания потока винтом). Но в силу их малости по сравнению с r ими обычно пренебрегают.
( за счет отбрасывания воздуха винтом) и окружной индуктивной скорости Ut ( за счет закручивания потока винтом). Но в силу их малости по сравнению с r ими обычно пренебрегают.
Угол между вектором полной скорости и хордой сечения называется углом атаки сечения -  r.
r.
Угол между вектором полной скорости сечения и плоскостью вращения называется углом притекания струй  r.
r.
Одной из характеристик винта является его шаг Н, т.е. расстояние, проходимое винтом в осевом направлении в неподатливой среде за один оборот
 .
.
Однако в силу того, что винт движется в воздухе, вводится параметр поступь винта
 ,
,
т.е. расстояние, проходимое винтом в осевом направлении за один оборот в воздухе.
Поступь винта, отнесенная к его диаметру, называется относительной поступью или коэффициентом скорости
 .
.
4.2. Тяга, мощность и КПД винта
Полная аэродинамическая сила, возникающая на лопасти при вращении винта, Ri может быть разложена на две составляющие:
Pi - сила тяги лопасти - параллельная оси вращения;
Хi - сила сопротивления вращению параллельна плоскости вращения.
Структура формул для определения этих сил аналогична формулам подъемной силы и силы лобового сопротивления крыла, только за характерную скорость принимается скорость, пропорциональная скорости конца лопасти (ncD) , за характерную площадь - D2 и по другому обозначаются коэффициенты пропорциональности.
Поэтому формула для тяги винта в целом имеет вид:
 ,
,
где  - коэффициент тяги,
- коэффициент тяги,
nc - число оборотов винта в секунду.
Для преодоления силы сопротивления вращению к винту необходимо приложить крутящий момент М, т.е. затратить мощность
N=M
Формула для мощности имеет вид
 ,
,
где  - коэффициент мощности.
- коэффициент мощности.
Коэффициент полезного действия винта - это отношение полезной мощности, передаваемой винтом на движение ЛА, к затраченной мощности
 .
.
С учетом выражений для P и N получаем
 .
.
4.3. Нормальные характеристики винтов. Режимы работы.
Нормальными характеристиками винтов называются зависимости коэффициентов тяги , мощности и КПД  от коэффициента скорости
от коэффициента скорости  при постоянном угле установки лопасти .
при постоянном угле установки лопасти .
 |
Рис.4.4
По нормальным характеристикам устанавливают следующие режимы работы винта:
1. Работа винта на месте.
2. Пропеллерный (основной) режим.
3. Режим нулевой тяги.
4. Режим торможения.
5. Режим авторотации.
6. Режим ветряка.
Рассмотрим кратко физическую картину этих режимов.
1.Режим работы винта на месте.
Соответствует точке О на нормальных характеристиках.
=0 (поступательное движение отсутствует), =0 (винт не совершает полезной работы)
r=r, >0 (винт создает тягу), >0 (на вращение затрачивается мощность).
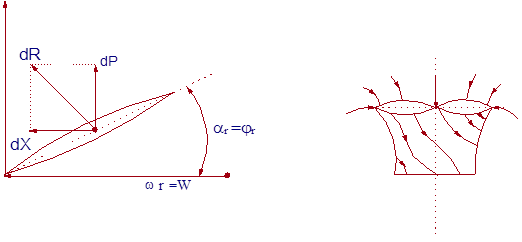 |
Рис.4.5
2.Основной (пропеллерный режим)
Соответствует участку от точки О до точки А, за исключением этих точек.
>0, >0, r>0, сначала растет, затем падает до нуля.
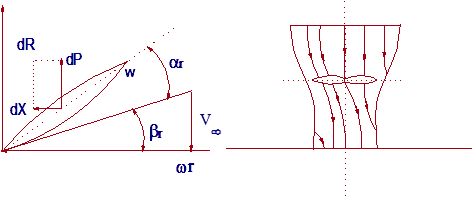 |
Рис.4.6
3. Режим нулевой тяги
Соответствует точке А. =0 (винт не создает тягу), =0, >0. Полная аэродинамическая сила лежит в плоскости вращения.
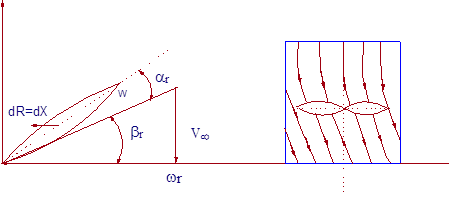
Рис.4.7
4. Режим торможения
Соответствует участку от точки А до точки В за исключением этих точек. Тяга отрицательна (<0), >0.
 | |||
 |
5. Режим авторотации.
Соответствует точке В. <0. Винт вращается за счет энергии набегающего потока - =0.
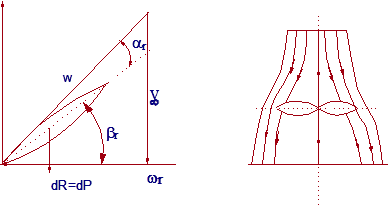
Рис.4.9
Вам также может быть полезна лекция "8.5 Борьба за независимость".
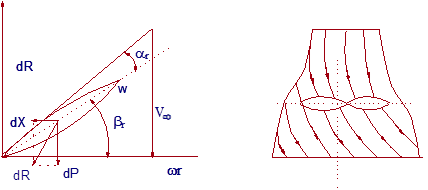
6. Режим ветряка
Правее точки В. Винт вращается под действием набегающего потока, создает отрицательную тягу и передает мощность на вращение двигателя.
<0, <0
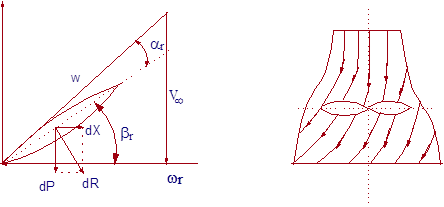
Рис.4.10



















