
Автоматизация судовых дизельных установок
ГЛАВА 7
Автоматизация судовых дизельных установок
7.1. Общие вопросы автоматизации
Большинство дизельных энергетических установок судов дедвейтом свыше 3 тыс. т последних лет постройки как отечественного, так и мирового флота, а также судов, намечаемых к постройке в ближайшем будущем, снабжаются средствами автоматизации, обеспечивающими обслуживание установки на ходу одним вахтенным механиком из центрального пульта управления (ЦПУ) и безвахтенное обслуживание на стоянке.
Для осуществления такой схемы обслуживания, соответствующей требованиям Регистра СССР на символ А2, предусматривается следующее:
1) дистанционное автоматизированное управление (ДАУ) главными двигателями с мостика;
2) автоматическое и дистанционно-автоматизированное управление насосами, обслуживающими главный двигатель и дизель-генераторы;
3) автоматическое или дистанционно-автоматизированное управление компрессорами пускового воздуха;
Рекомендуемые материалы
4) автоматизированная судовая электростанция, обеспечивающая автоматическую синхронизацию основных дизель-генераторов, а также автоматический запуск аварийного дизель-генератора при исчезновении питания на шинах главного распределительного щита;
5) автоматическое управление вспомогательным и утилизационным котлами. При этом подготовка и пуск котла обычно осуществляются вручную;
6) автоматизированные системы охлаждения и смазки главного двигателя и дизель-генераторов;
7) автоматизированные системы терморегулирования различных систем машинного отделения (подогрев расходных цистерн, масла и топлива перед сепаратором и др.);
8) автоматическая система регулирования вязкости тяжелого топлива;
9) автоматизированные сепараторы тяжелого топлива;
10) автоматизированные системы цилиндровой смазки;
11) автоматическое или дистанционное осушение из ЦПУ через сепаратор трюмных вод, кормовых колодцев машинного отделения и рецесса коридора гребного вала. В системе контроля предусматривается сигнализация верхнего уровня воды в колодцах грузовых трюмов, а также автоматическая остановка осушительного насоса по нижнему уровню воды в колодцах;
12) дистанционный замер уровней и сигнализация по опасным значениям в расходных и отстойных цистернах машинного отделения;
13) дистанционные запуск и остановка пожарных насосов из ЦПУ и помещения палубной канцелярии;
14) дистанционные запуск и остановка вентиляторов из ЦПУ и остановка с мостика;
15) счетчики продолжительности работы вспомогательных механизмов.
Помимо этого, предусматриваются расширенная система сигнализации с регистрацией отклонений параметров и выносом обобщенных сигналов в каюты механиков, рулевую рубку, кают-компанию и столовую; расширенная автоматизированная система пожарной сигнализации с тепловыми и дымовыми датчиками в машинном отделении, сигнализация наличия вахтенного в помещении центрального пульта управления.
Перечисленный объем автоматизации позволяет осуществлять обслуживание силовой установки из ЦПУ одним механиком. В том случае, если механизмы оборудования энергетической установки способны нормально работать без местного обслуживания периодами не менее 24 ч и без дистанционного (по приборам) контроля за их работой из рулевой рубки или других мест, а с применением контроля только по обобщенной сигнализации, а также при наличии автоматического ввода в действие всех резервных вспомогательных механизмов при выходе из строя основных, обеспечения самоконтроля или автоматического обнаружения неисправностей в устройствах управления, аварийно-предупредительной сигнализации и защиты главных механизмов и ответственных систем, допускается обслуживание установки без постоянной вахты в машинном отделении и ЦПУ. В этом случае присваивается символ автоматизации А1.
Таким образом, как следует из перечисленного выше объема автоматизации, в настоящее время осуществляется переход от автоматизации отдельных операций к комплексной автоматизации энергетической установки. При комплексной автоматизации функции управления, регулирования, контроля, обслуживания и защиты энергетической установки осуществляются с помощью совокупности автоматически действующих устройств без непосредственного участия человека.
Роль обслуживающего персонала при этом сводится к заданию программы функционирования, периодическому наблюдению, а также выполнению профилактических осмотров и текущих ремонтных работ.
Комплексная автоматизация позволяет упростить управление и повысить маневренность судна, исключить неправильные операции, обеспечить работу двигателей на наиболее выгодном режиме и значительно сократить численность обслуживающего персонала.
Учитывая, что системы автоматического регулирования (САР) являются основной частью комплексной автоматизации, рассмотрим отдельно основные САР дизеля и обслуживающих механизмов. Современный дизель является сложным объектом регулирования. В общем случае в двигателях дизеля автоматически регулируются следующие величины: частота вращения коленчатого вала; температуры в системах охлаждения, смазки, воздуха наддува; вязкость тяжелого топлива.
7.2. Регулирование частоты вращения
Динамика дизеля, снабженного газотурбинным наддувом, как объекта регулирования частоты вращения, функциональная схема САР которой приведена на рис. 86, может быть описана следующей системой дифференциальных уравнений:
1) дизеля:
 ; (89 а)
; (89 а)
2) турбокомпрессора:
 ; (89 б)
; (89 б)
3) впускного коллектора:
 ; (89 в)
; (89 в)
4) выпускного коллектора:
 ; (89 г)
; (89 г)
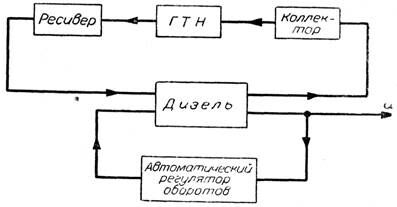
Рис. 86. Функциональная схема САР частоты вращения судового ДВС
Решая записанные уравнения совместно, получим одно дифференциальное уравнение 4-го порядка. В этих уравнениях Тд, Тт, Тк и Тв — соответственно постоянные времени двигателя, турбонагнетателя, впускного и выпускного коллекторов, a k1, k2, k3, k4, k5, k6, k7, k8, k9, k10 — коэффициенты усиления;
 ;
;  ;
;  ;
;  ;
;  —
—
безразмерные переменные соответственно частоты вращения вала дизеля, ротора турбины, давления компрессора, давления выхлопных газов и перемещения рейки топливных насосов.
Как показали исследования, проведенные в МВТУ им. Баумана, ЛПИ и т.п., инерционности впускного и выпускного коллекторов, определяемые постоянными времени Тк и Тв. весьма малы по сравнению с инерционностями дизеля и турбокомпрессора, а поэтому в практических расчетах с достаточной степенью точности динамика этих элементов может быть описана не дифференциальными, а алгебраическими уравнениями. В этом случае динамика системы будет описываться дифференциальным уравнением 2-го порядка. В то же время было обнаружено, что при значительной длине топливного трубопровода высокого давления (от топливного насоса к форсункам), что имеет место на малооборотных дизелях большой мощности, система топливоподачи обладает существенной инерционностью, а динамика ее может быть описана дифференциальным уравнением 2-го порядка.
Влияние инерционности системы топливоподачи становится особенно ощутимым при изменении внешней нагрузки по периодическому закону с амплитудой более 10%.
Поэтому при детальных исследованиях системы в некоторых случаях необходимо также учитывать и динамику топливоподающей системы.
Как известно, судовой дизель водоизмещающего судна, работающий на гребной винт, как объект регулирования частоты вращения обладает положительным самовыравниванием и поэтому при отсутствии больших возмущений может работать без регулятора. Однако ограничения колебаний частоты вращения при плавании судна в штормовых условиях, а также то, что при наличии регулятора более конструктивно решаются вопросы, связанные с установкой автоматизированного дистанционного управления дизелем, последние в большинстве случаев оборудуются регуляторами частоты вращения, тип и характеристики которых выбираются в зависимости от типа судна и его назначения, а также специфических особенностей дизеля и предъявляемых к нему требований.
7.2.1. Классификация регуляторов частоты вращения
Автоматические регуляторы частоты вращения ДВС классифицируются обычно в зависимости от типа чувствительного элемента на механические, пневматические и гидравлические; от передачи усилий на органы управления двигателем — на регуляторы прямого и регуляторы непрямого действия; от регулируемых скоростных режимов — на предельные, однорежимные, двухрежимные и всережимные; от типа обратной связи — на регуляторы без обратной связи, с жесткой обратной связью, с изодромной обратной связью и с комбинированной связью; в зависимости от числа импульсов — на одно- и многоимпульсные.
Для регулирования частоты вращения вала судовых двигателей наиболее часто применяют регуляторы с механическими чувствительными элементами непрямого действия, как предельные, так и всережимные.
В случае установки предельного регулятора частота вращения вала дизеля регулируется непосредственным воздействием с поста управления на регулирующий орган топливного насоса.
При этом каждому положению рукоятки (или маховика) на посту управления соответствуют однозначное положение регулирующего органа топливного насоса и определенная частичная характеристика двигателя. Характеристики двигателя, снабженного предельным регулятором, приведены на рис. 87. Предельный регулятор вступает в действие и перемещает топливорегулирующие органы только в сторону уменьшения подачи топлива при увеличении частоты вращения выше допустимого значения, что может иметь место при оголении гребного винта в штормовых условиях, поломке гребного вала либо потере винта.

Рис. 87. Характеристики судового дизеля, снабженного предельным
регулятором частоты вращения:
1, 3, 4, 5 — винтовые характеристики; 2 — внешняя характеристика;
6 — регуляторные характеристики; 7 и 8 — частичные характеристики
При частоте вращения меньше предельной регулятор не воздействует на привод топливорегулирующих органов. Одна из возможных схем взаимодействия предельного регулятора с топливорегулирующими органами приведена на рис. 88.
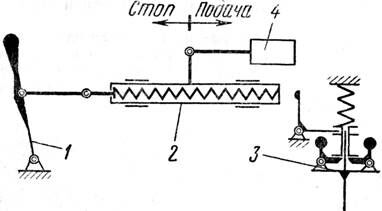
Рис. 88. Схема взаимодействия предельного регулятора
с топливорегулирующими органами:
1 — рукоятка ручного управления топливоподачей; 2 — пружинная тяга;
3 — предельный регулятор; 4 — топливный насос
В последние годы все большее распространение стали получать всережимные регуляторы, которые предназначены для автоматического поддержания любого заданного скоростного режима — от минимально устойчивого до номинального. Характеристика двигателя, снабженного всережимным регулятором, приведена на рис. 89.
При всережимном регуляторе, включенном по всережимной схеме, управление топливоподачей при любых режимах работы осуществляется регулятором, выходной рычаг сервомотора которого без люфтов соединен с приводом топливорегулирующего органа топливных насосов. Режим работы двигателя задается с поста управления путем изменения затяжки пружины чувствительного элемента регулятора.
Из изложенного выше вытекает, что при наличии предельного регулятора цикловая подача топлива остается неизменной, а частота вращения вала двигателя при изменении внешней нагрузки будет изменяться в широком диапазоне (до максимально допустимых).
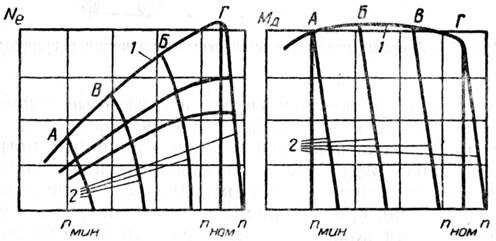
Рис. 89. Характеристика судового дизеля, снабженного всережимным
регулятором частоты вращения:
1 — внешняя характеристика; 2 — регуляторные характеристики
В этом случае тепловая нагрузка и связанные с ней температурные напряжения деталей цилиндро-поршневой группы остаются практически неизменными, а инерционные нагрузки в деталях движения будут достигать максимальных значений. В случае установки всережимного регулятора, включенного по всережимной схеме, при изменении внешней нагрузки будет изменяться цикловая подача топлива так, что частота вращения будет поддерживаться неизменной. В этом случае инерционные нагрузки, вызываемые изменением частоты вращения, не будут иметь места, но зато колебания тепловой нагрузки и связанные с ней температурные напряжения в деталях будут иметь максимальные значения.
Следовательно, как предельная, так и всережимная схема включения регулятора имеет свои отрицательные стороны.
В связи с этим в последние годы на дизелях с прямой передачей на винт находят применение всережимные регуляторы, включаемые по всережимно-предельной схеме (рис. 90).
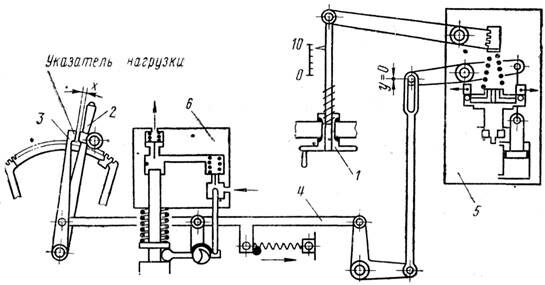
Рис. 90. Всережимно-предельная схема включения регулятора
При такой схеме включения всережимный регулятор может работать как предельный и как всережимный.
Настройка регулятора 5 на необходимый скоростной режим осуществляется маховичком 1, при помощи которого через систему рычагов изменяется затяжка пружины чувствительного элемента. Маховичок 1 располагается на посту управления двигателем. Цикловая подача топлива устанавливается рычагом 2 в соответствии с требуемой нагрузкой независимо от регулирования скоростного режима. Изменение нагрузки дизеля приводит к изменению скоростного режима.
Рычаг 2 служит упором-ограничителем для указателя нагрузки 3, который при помощи шарнирного устройства связан с рычагом 4, воздействующим на регулирующий орган топливного насоса 6.
Такая связь устройства настройки 1 с рычагом 2 в зависимости от их взаимного расположения дает возможность обеспечить работу регулятора либо как всережимного, либо как предельного.
При наличии зазора х между рычагом 2 и указателем нагрузки 3 и отсутствии зазора у (у = 0) в серьге соединения рычага 4 с выходным рычагом регулятора регулятор работает как всережимный, а частота вращения вала дизеля определяется положением маховичка 1 настройки регулятора. При отсутствии зазора х и наличии зазора у регулятор работает как предельный, а частота вращения задается рукояткой 2.
Однорежимные регуляторы предназначаются для поддержания постоянного значения заданной частоты вращения при любых нагрузках. Такие регуляторы устанавливаются на вспомогательных двигателях (дизель-генераторы, дизель-компрессоры и др.) либо на главных двигателях при включении в качестве предельных регуляторов.
Двухрежимные регуляторы обеспечивают автоматическое поддержание частоты вращения вала дизеля на двух крайних режимах, соответствующих минимальной и максимальной нагрузкам (холостой ход и полная нагрузка). В промежутке между этими режимами управление двигателем осуществляется вручную с непосредственным воздействием оператора на топливорегулирующие органы. Такого типа регуляторы обычно предназначаются для двигателей небольших мощностей, работающих на винт через реверсивно-редукционные муфты.
Для улучшения динамических характеристик регуляторов (в основном устойчивости и продолжительности переходного процесса) вводятся дополнительные обратные связи. На рис. 91, а, б и в показаны схемы регуляторов с различными типами обратных связей.
 |

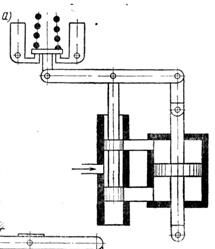
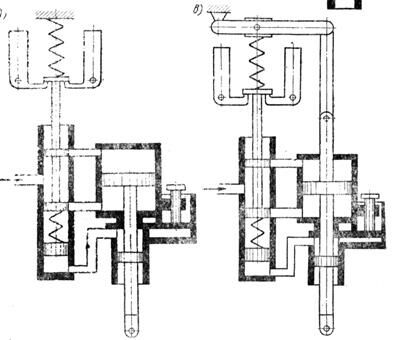
Рис. 91. Схемы регуляторов частоты вращения с обратными связями:
а — жесткой; б — изодромной; в — комбинированной (жесткой силовой и изодромной)
Как известно, при наличии жесткой обратной связи регулятор работает со статической ошибкой или остаточной степенью неравномерности. Конструктивно жесткие обратные связи выполняются таким образом, что имеется возможность изменять остаточную степень неравномерности за счет изменения плеч рычага обратной связи.
В отличие от регулятора с жесткой обратной связью в регуляторах с изодромной обратной связью неравномерность появляется только в режиме переходного процесса, а по окончании его исчезает. Поэтому изодромные регуляторы называют также регуляторами с временным статизмом.
В регуляторах с комбинированной обратной связью остаточная степень неравномерности за счет настройки может изменяться от нуля до своего максимального значения (6-12%). Остаточная степень неравномерности требуется для обеспечения параллельной работы двигателей, а также для уменьшения колебания цикловой подачи в случае работы двигателя в условиях периодически изменяющейся нагрузки (например, штормовые условия).
7.2.2. Схемы регуляторов частоты вращения
Предельный регулятор непрямого действия фирмы «Фиат» (рис. 92) установлен на главных двигателях большой мощности (суда типа «Лениногорск»). Вал 1 регулятора через систему передач приводится во вращение от вала двигателя. При увеличении угловой скорости выше допустимой (103-105% от номинальной) шарики 3 чувствительного элемента под действием центробежной силы будут раздвигаться и перемещать муфту 4 вверх, которая через рычаг 6 переместит золотник 7. Золотник 7 управляет двумя пневматическими сервомоторами 8 и 10 таким образом, что первоначально срабатывает один, а затем другой, отключая соответственно первую, а затем вторую группу топливных насосов. Маховик служит для изменения затяжки пружины 5 при первоначальной настройке регулятора.
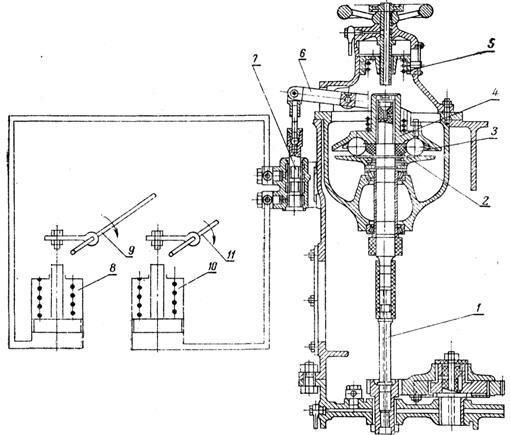
Рис. 92. Схема регулятора частоты вращения двигателя фирмы «Фиат»:
1 — приводной вал; 2 — поперечина; 3 — грузы; 4 — муфта; 5 — пружина задания; 6 — рычаг; 7 — управляющий золотник усилителя; 8 — сервомотор, отключающий первую группу ТНВД; 9 — вал механизма отключения первой группы ТНВД; 10 — сервомотор, отключающий вторую группу ТНВД; 11 — вал
механизма отключения второй группы ТНВД
Всережимный регулятор Р13М (центробежного типа, непрямого действия, с изодромной и жесткой обратными связями) нашел широкое применение в отечественных серийных двигателях типа 8ДР 43/61, ДР 30/50 и др. Схема этого регулятора приведена на рис. 93.
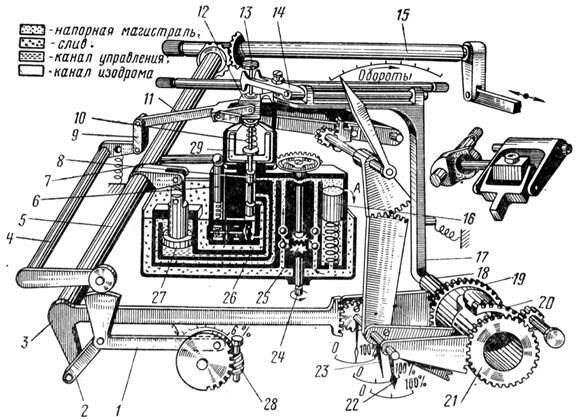
Рис. 93. Схема всережимного регулятора частоты вращения Р13М
Конструктивно регулятор является типичным регулятором такого класса; выполнен в виде агрегата с замкнутой гидравлической системой. Регулятор приводится во вращение от двигателя через вертикальный вал 24 и может работать при любом направлении вращения двигателя.
Регулятор имеет устройство 28 для изменения степени неравномерности в пределах от 0 до 6%, а также устройство для ограничения нагрузки двигателя. Ограничение нагрузки осуществляется вручную и автоматически. Установка ручного ограничителя в пределах 25—110% производится поворотом рукоятки, воздействующей на шестерню 21.
При установившемся режиме центробежная сила грузов 29 уравновешивается усилием пружины 10. При уменьшении внешней нагрузки угловая скорость вала двигателя возрастает; под действием возросшей центробежной силы грузы 29 разойдутся и, преодолевая усилие пружины, переместят золотник 8 вверх. Напорная масляная магистраль, давление в которой обеспечивается шестеренчатым масляным насосом 25 и аккумулятором 16, сообщится с нижней полостью сервомотора, в результате чего поршень 27 переместится вверх, поворачивая кинематически связанные с ним продольный 5 и поперечный 15 валы в сторону уменьшения подачи топлива. При перемещении поршня сервомотора и повороте вала 5 приходит в действие механизм жесткой обратной связи, включающий в себя сектор 3, рычаг 2, шатун 1, валик с роликом 4, рычаг 9 и суммирующий рычаг 11, который через муфту 12 воздействует на пружину 10 так, что после наступления равновесия при новом положении поршня сервомотора пружина будет дополнительно поджата и новая равновесная частота вращения несколько возрастет. При движении поршня сервомотора вверх поршень изодрома 6, следуя за пальцем изодрома 7, движется вверх, создавая разрежение в канале изодрома, которое подтягивает золотник в сторону равновесного положения. Через канал иглы 26 изодрома масло подсасывается из сливной полости и изодром постепенно разгружается. При увеличении нагрузки перемещение деталей произойдет в обратном направлении.
Ограничение нагрузки двигателя достигается соответствующей установкой шестерен 20 и 21 механизма ограничителя (с помощью рукоятки 12 и трубки, расположенной справа от шестерни 21). Задавая ограничение нагрузки вручную или одновременно с заданием скоростного режима, устанавливают в определенное положение стрелки-указатели ручного 22 и автоматического 23 ограничителей нагрузки и связанные с ними шестерни 20 и 21, на торцевых поверхностях которых имеются выступы-кулаки. При возрастающей нагрузке поршень сервомотора переместится вниз, повернет вал 5 и (через сектор 3 с рычагом) шестерню 19 таким образом, что выступы на торце шестерни 19 начнут набегать на выступы-кулаки шестерен 20 и 21. В результате этого шестерня 19 вместе с толкателем 18 сместится вдоль оси и повернет при этом рычаг 17, который через вильчатый рычаг 14 и упорную тарелку 13 приподнимет золотник до нейтрального положения и прекратит перемещение поршня сервомотора.
Другим примером регулятора непрямого действия, который нашел широкое применение на двигателях иностранной постройки большой и средней мощности, является всережимный регулятор, выпускаемый серийно американской фирмой «Вудворд».
Схема такого регулятора марки UG—40TL приведена на рис. 94. Марка регулятора расшифровывается следующим образом: U — универсальный; G — регулятор; цифра 40 означает работоспособность регулятора (произведение усилия, развиваемого выходным валиком, на перемещение его) в фунто-футах (~550 кгс-см); TL — ограничение нагрузки.
Приведенная на рис. 94 схема регулятора является универсальной, так как содержит в себе дополнительные устройства программного ограничения подачи топлива в зависимости от заданного скоростного режима и ограничения подачи топлива в зависимости от давления наддува.
При установившемся режиме подвижная муфта, выполняющая роль устройства сравнения, находится в динамическом paвновесии под действием усилия пружины 4 и центробежных сил грузов 3. При нарушении равновесного режима муфта переместится и передвинет кинематически связанный с ней золотник 2, управляющий подводом масла в нижнюю полость сервомотора 1. При перемещении поршня сервомотора 1 вступят в действие обратные связи и переместят золотник 2 в противоположном направлении. Рычаги 25, 26 и 18 жесткой обратной связи изменят затяжку 4 таким образом, что при увеличении нагрузки она уменьшается и при новом установившемся режиме двигатель будет работать с меньшей частотой вращения.
За счет изменения соотношения плеч рычагов обратной связи можно изменять степень неравномерности в пределах 0— 12%.
Изодромная обратная связь действует следующим образом: при повороте выходного валика 23 поршень 8 изодрома смещается и изменяет давление под поршнем 6, в результате чего он переместится и в свою очередь передвинет золотник 2 в исходное (среднее) положение. По прошествии некоторого времени разрежение или избыточное давление под поршнем вследствие перетекания масла через дроссель 7 исчезает, поршень 6 под действием усилия деформированной пружины возвращается в свое первоначальное положение, а изодромная обратная связь выключается.
За счет перемещения подвижной опоры 9 можно изменять величину временного статизма изодромной связи, а время изодрома, определяющее продолжительность переходного процесса, регулируется иглой 7.
Ограничение топливоподачи по давлению наддувочного воздуха или величине крутящего момента осуществляется соответственно поворотом коромысел 12 или 19, сидящих свободно на валике 13 таким образом, что регулировочные винты нажимают на подвижный валик 14, а планка 16 поворачивается вокруг валика 13 толкателем 11 и горизонтальным рычагом удерживает золотник 2 от перемещения в направлении увеличения подачи топлива. Коромысла 12 и 19 соответственно шарнирно связаны с двухплечным рычагом 20 и планкой 10. На рычаг 10 действуют усилия, которые характеризуют соответствие закону заградительной характеристики (по коэффициенту избытка воздуха) отсечки топлива, определяемой положением поршня сервомотора 1 и давлением наддувочного воздуха в ресивере, измеряемым при помощи сильфона и преобразуемым в линейное перемещение профильного лекала 21 сервомотором 22.
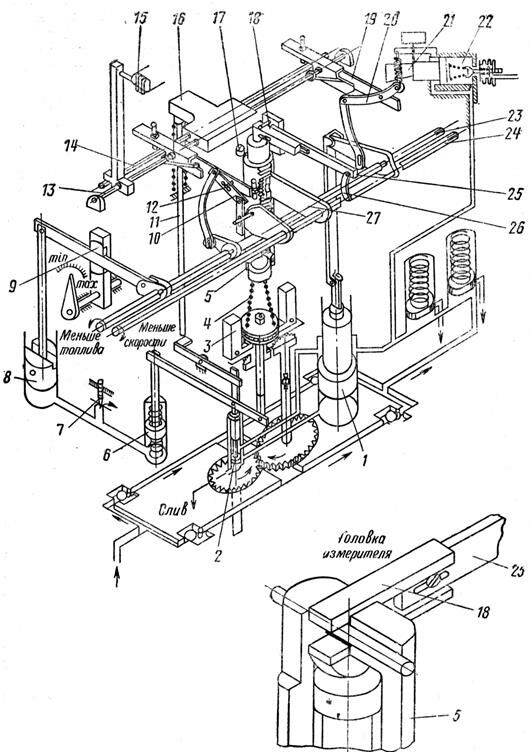
Рис. 94. Схема унифицированной модели регулятора
фирмы «Вудворд» (UG—40TL)
В том случае, когда подача топлива в двигатель в процессе переходного режима меньше установленной валиком 24, а также меньше соответствующей давлению наддувочного воздуха, механизм ограничения не вступает в действие.
Настройка регулятора на требуемый скоростной режим осуществляется при помощи валика 24 через сектор 27.
Соленоид 15 предназначен для экстренной дистанционной остановки двигателя за счет выключения подачи топлива. Минимальная частота вращения устанавливается винтом 17, который ограничивает ход .втулки 5.
В целях обеспечения более высокого качества регулирования, которое особенно требуется в САР частоты вращения вала дизель-генераторов, применяют двухимпульсные регуляторы.
Основным импульсом в таких регуляторах, как и в одноимпульсных, остается отклонение частоты вращения вала, а в качестве дополнительного импульса вводится либо изменение нагрузки, либо воздействие по производной от частоты вращения вала.
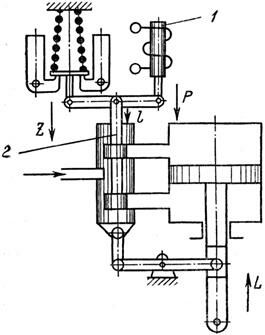
Рис. 95. Схема двухимпульсного регулятора
частоты вращения
Одна из возможных схем двухимпульсного регулятора с дополнительным импульсом по нагрузке приведена на рис. 95. Ток, пропорциональный нагрузке, подается на обмотку электромагнита 1, выполняющего функции измерителя нагрузки.
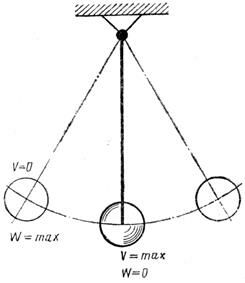
Рис. 96. Схема воздействия по производной
При изменении нагрузки еще до изменения частоты вращения вала измеритель нагрузки 1 переместит золотник 2 усилительного устройства, в результате чего поршень сервомотора, воздействуя на регулирующий орган, изменит подачу топлива, предотвратив тем самым значительные отклонения частоты вращения вала.
Принцип действия регулятора с воздействием по производной можно объяснить на примере движения маятника, изображенного на рис. 96. Когда маятник находится в крайних положениях, движение его меняет направление и поэтому скорость равна нулю, зато ускорение, или производная от скорости, имеет максимальное значение. Точно так же при соответствующим образом сконструированном чувствительном элементе можно получить воздействие от изменения ускорения, когда изменение скорости, являющейся регулируемой величиной, еще не наступило.
Регуляторы, имеющие в качестве второго импульса воздействие по производной, по сравнению с одноимпульсными регуляторами срабатывают с некоторым опережением и поэтому обеспечивают более качественное протекание переходного процесса.
7.2.3. Регулирование частоты вращения
параллельно работающих дизелей
Параллельную работу дизелей применяют в дизель-редукторных агрегатах, когда два или более двигателей через редуктор работают на общий вал либо при работе нескольких дизель-генераторов на общие шины. Как в одном, так и в другом случае частота вращения валов параллельно работающих дизелей будет одинаковая, поэтому оптимальным распределением между ними активной нагрузки будет такое, при котором она будет пропорциональна номинальным мощностям двигателей. Для такого распределения нагрузки необходимо, чтобы регуляторные характеристики всех двигателей имели одинаковую форму и были совмещены (рис. 97).
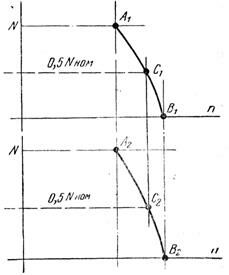
Рис. 97. Регуляторные характеристики
параллельно работающих дизелей
В связей с тем, что при различных частичных режимах настройки регуляторов регуляторные характеристики могут несколько изменяться, необходимо, чтобы они были прямолинейными или близкими к ним. В то же время для обеспечения устойчивой параллельной работы и надлежащего распределения нагрузки между двигателями регуляторные характеристики должны обеспечивать некоторую неравномерность. Поэтому изодромные регуляторы с неравномерностью характеристик, близкой к нулевой, для параллельно работающих дизелей не применяются. Для обеспечения надлежащего регулирования параллельно работающих дизель-генераторов, т.е. обеспечения устойчивой работы и пропорционального распределения нагрузки, применяют обычно изодромные регуляторы с остаточной неравномерностью (гибкая и дополнительная жесткая обратная связь).
В последние годы для обеспечения высококачественного регулирования начинают применять так называемые корректоры нагрузки, в которых специальное устройство сравнивает положение приводов реек топливных насосов и при наличии рассогласования вырабатывает сигнал, воздействующий на задающее устройство регулятора.
7.3. Регулирование температуры охлаждающей среды
Системы охлаждения современных судовых дизелей в большинстве случаев выполняются замкнутыми. Для обеспечения работы дизеля на оптимальном температурном режиме, при котором достигаются наибольшее значение эффективного к.п.д. двигателя и минимальные износы деталей цилиндро-поршневой группы, температура охлаждающей воды внутреннего контура автоматически поддерживается на заданном уровне.
Регулирование температуры охлаждающей воды может осуществляться одним из следующих способов:
1) способом дросселирования, при котором на входе либо выходе воды, охлаждающей двигатель, устанавливается дроссельный клапан, изменяя проходное сечение которого, можно изменять количество воды, проходящей через двигатель;
2) способом обвода, при котором изменяется количество забортной воды, прокачиваемой через холодильник, за счет обвода части ее по байпасному трубопроводу;
3) способом перепуска, при котором часть горячей воды, выходящей из двигателя, по перепускному трубопроводу подается обратно на вход двигателя.
Наибольшее распространение в судовых установках получил способ регулирования перепуском, при этом в зависимости от места установки чувствительного элемента можно поддерживать постоянной температуру воды на входе либо выходе из двигателя.
На рис. 98 изображена принципиальная схема САР температуры воды с наиболее распространенным местом установки чувствительного элемента на трубопроводе с водой, выходящей из двигателя. В этом случае регулируемой величиной, поддерживаемой с учетом статической ошибки на заданном уровне, является температура воды на выходе, а температура ее на входе будет изменяться в зависимости от режима работы.
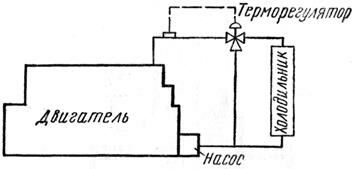
Рис. 98. Схема САР температуры охлаждающей воды
Исследования показали, что при принятой схеме регулирования обеспечивается более благоприятное распределение температур в охлаждаемых деталях, чем при регулировании температуры на входе, а переходные процессы при сбросах и набросах нагрузки протекают по экспоненциальному закону. В связи с этим ГОСТ 10150—62 и ГОСТ 12709—67 устанавливают в качестве регулируемой величины температуру воды на выходе из двигателя.
При повышении температуры воды САР должна сработать таким образом, чтобы количество воды, проходящее через холодильник, увеличивалось, а идущей на перепуск — уменьшалось. В случае понижения температуры — наоборот.
В соответствии с ГОСТ 12709—67 САР температуры охлаждающей воды должна удовлетворять следующим требованиям:
¾ диапазон настройки регулятора — 35-100°С;
¾ неравномерность (статическая ошибка регулирования) — не более 12°С;
¾ нечувствительность — не более 1°С;
¾ инерционность регулятора, под которой понимается время перемещения регулирующего органа на 2/3 полного хода при скачкообразном изменении температуры среды на величину, равную неравномерности регулятора — не более 40 с;
¾ заброс температуры в переходных процессах при единичном скачкообразном возмущении — не более 6°С;
¾ продолжительность переходного процесса в САР при полном сбросе или набросе нагрузки — не более 20 мин для главных двигателей и не более 10 мин для вспомогательных.
В САР температуры масла регулируемой величиной является температура масла на входе в двигатель, а регулирование ее обычно осуществляется посредством перепуска части забортной воды, помимо масляного холодильника.
В остальном требования к САР температуры масла аналогичны изложенным выше.
7.3.1. Регуляторы температуры
Регуляторы температуры или терморегуляторы выполняются прямого и непрямого действия. На двигателях небольшой мощности (до 2000 л.с.) преимущественно применяются терморегуляторы прямого действия, на мощных двигателях применяют терморегуляторы как прямого, так и непрямого действия. Регуляторы прямого действия выполняются недистанционными, когда чувствительный элемент встроен в регулирующий орган, и дистанционными. Чувствительные элементы в терморегуляторах применяются парожидкостного и объемного типа.
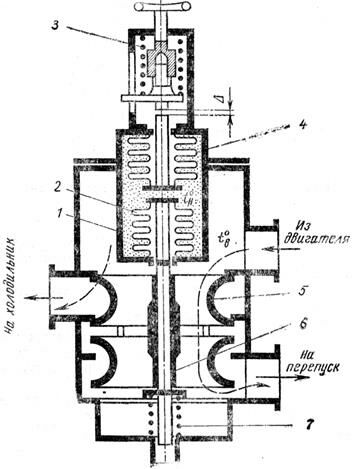
Рис. 99. Схема недистанционного регулятора
температуры прямого действия
На рис. 99 приведена схема недистанционного регулятора прямого действия с объемным измерителем. Чувствительными элементами в этом регуляторе являются два сильфона 2 и 4. Пространство между сильфонами и кожухом 1 заполнено жидкостью с большим объемным коэффициентом расширения (глицерин, толуол и др.). При увеличении температуры объем жидкости-наполнителя увеличивается, в результате чего будут сжиматься сильфоны 2 и 4. Так как препятствий для перемещения (сжатия) сильфона 4 нет, то при повышении температуры первоначально будет деформироваться сильфон 4 до тех пор, пока не исчезнет установочный зазор D. После этого при дальнейшем повышении температуры станет деформироваться сильфон 2, в результате чего регулирующие органы 5 и 6 будут перемещаться вниз, увеличивая тем самым количество воды, поступающей в холодильник, и уменьшая количество воды, идущей на перепуск.
В том случае, если регулирующие органы дойдут до упора, а температура будет повышаться, для предохранения клапана от поломки предусмотрена предохранительная пружина 3, при сжатии которой верхний сильфон сможет получить дополнительное перемещение. При понижении температуры регулирующий орган будет перемещаться вверх под действием возвратной пружины 7. Настройка регулятора на необходимый температурный режим осуществляется за счет изменения зазора D. Статическая характеристика регулятора такого типа приведена на рис. 100. Как видно из рисунка, статическая характеристика является нелинейной и имеет петлеобразный вид. Неравномерность этого регулятора Dtнер = 18°С, а нечувствительность Dtнеч ± 0,75°С.
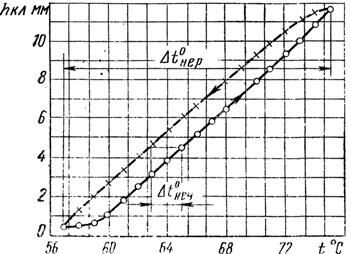
Рис. 100. Статическая характеристика недистанционного
регулятора прямого действия
Схема дистанционного регулятора прямого действия с парожидкостным чувствительным элементом приведена на рис. 101. Чувствительный элемент 1, капиллярная трубка 2 и полость сильфона 3 заполнены легковскипающей жидкостью. Давление внутри герметичной системы зависит от температуры среды. Настройка терморегулятора осуществляется за счет изменения натяжения пружины 4 при помощи гайки 5.
Схема пневматического регулятора температуры непрямого действия с объемным жидкостным чувствительным элементом приведена на рис. 102. Регулятор состоит из следующих конструктивных узлов: чувствительного элемента А; усилительного устройства Б и сервомотора мембранного типа В.
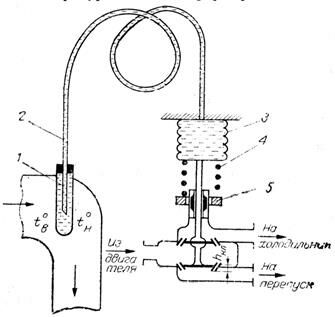
Рис. 101. Схема дистанционного регулятора
температуры прямого действия

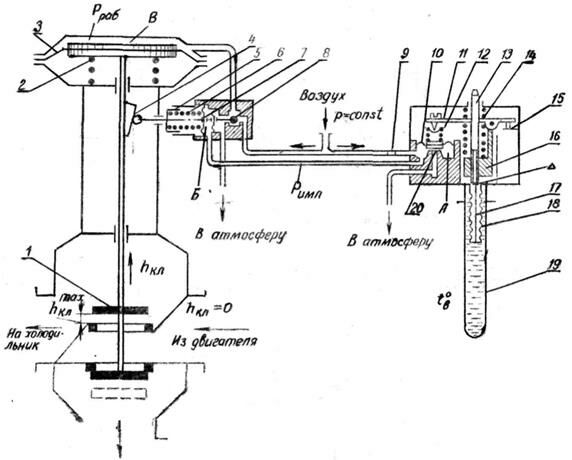
Рис. 102. Схема регулятора, температуры непрямого действия:
1 — регулирующий клапан; 2 — пружина сервомотора; 3 — мембрана сервомотора; 4 — кулачок-лекало жесткой обратной связи (ЖОС); 5 — толкатель ЖОС; 6 — пружина ЖОС; 7 — мембрана управляющего клапана (позиционера); 8 — управляющий клапан усилителя; 9 — дроссель; 10 — мембрана измерителя; 11 — рычаг измерителя; 12 — пружина измерителя; 13 — винт узла задания; 14 — пружина возврата; 15 — неподвижная опора рычага; 16 — гайка узла задания; 17 — шток чувствительного элемента (ЧЭ); 18 — сильфон ЧЭ; 19 — гильза ЧЭ;
20 — сопло измерителя
При повышении температуры среды повышается давление внутри гильзы 19, в результате чего шток чувствительного элемента (ЧЭ) 17 будет свободно перемещаться вверх до тех пор, пока не выберется зазор D. При дальнейшем перемещении штока вверх он будет (через винт узла задания 13) перемещать также вверх гайку узла задания 16 и левый конец рычага измерителя 11, в результате чего уменьшатся деформация и усилие, развиваемое пружиной измерителя 12, мембрана 10 переместится вверх и увеличит проходное сечение для выхода воздуха через сопло измерителя 20. Давление воздуха в камере под мембраной 10, а также на мембрану 7 уменьшится, в результате чего клапан 8, управляющий отводом воздуха в атмосферу, переместится вправо и уменьшит давление воздуха в камере и верхней полости сервомотора В. Мембрана 3 и связанный с ней регулирующий клапан 1 переместятся вверх, при этом количество охлаждающей среды, поступающее на холодильник, увеличится, в результате чего температура ее понизится до заданной. Настройка регулятора на необходимый температурный режим осуществляется путем изменения зазора D с помощью винта 13.
7.3.2. Динамика САР температуры
Система автоматического регулирования температуры включает в себя многоемкостный объект регулирования с распределенными параметрами. Это обстоятельство объясняется тем, что аккумулирование тепла может осуществляться в металле двигателя, пресной воде, заключенной в его зарубашечном пространстве, и металле корпуса водо-водяного холодильника, а также в трубках и забортной воде, прокачиваемой через холодильник. Температуры как пресной, так и забортной воды вследствие притока и отвода (потерь) тепла в различных местах тракта имеют неодинаковое значение, что приводит к распределенности параметров.
При выводе уравнений динамики САР обычно рассматривают упрощенную модель, считая параметры емкостей сосредоточенными.
Применительно к схеме, изображенной на рис. 98, математическое описание динамики системы будет состоять из следующих уравнений:
1) дифференциального уравнения 2-го порядка двигателя как теплового объекта регулирования;
2) дифференциального уравнения 2-го порядка водо-водяного холодильника;
3) алгебраического уравнения смесителя;
4) дифференциального уравнения 1-го порядка регулятора температуры.
При скачкообразном изменении нагрузки двигателя переходный процесс в САР температуры обычно имеет либо апериодический, либо малоколебательный характер. Продолжительность переходного процесса в зависимости от типа и размера двигателя может меняться в пределах 6—30 мин, при этом большие значения относятся к мощным малооборотным двигателям.
7.4. Регулирование температуры наддувочного воздуха
Для стабилизации оптимального значения коэффициента избытка воздуха, а также предотвращения выпадения влаги в продувочных ресиверах в последние годы передовые дизелестроительные фирмы стали устанавливать регуляторы температуры наддувочного воздуха совместно с регуляторами или корректорами, поддерживающими заданную разность температур наддувочного воздуха и точки росы.
Так, на т/х «Котовский» установлен электронный полупроводниковый регулятор фирмы «Дженерал Электрик».
Регулятор может осуществлять всережимную стабилизацию температуры либо быть переключенным на дистанционное управление исполнительным электродвигателем.
В качестве чувствительных элементов используются электрический хлористо-литиевый измеритель температуры точки росы и платиновый термометр сопротивления для замера температуры воздуха в продувочном ресивере.
7.5. Регулирование вязкости тяжелого топлива
Для снижения расходов на топливо ведущие дизелестроительные фирмы выпускают мощные мало- и среднеоборотные дизели, приспособленные для работы на тяжелых сортах топлива.
Качественный распыл тяжелого топлива может быть обеспечен только при условии, если вязкость его будет поддерживаться на определенном уровне, порядка 2°Е.
Для поддержания рекомендуемой заводом-строителем вязкости топлива применяют различного типа регуляторы вязкости.
В судовых установках наибольшее распространение получили регуляторы типа «Аскания Вискозимат» производства ФРГ, принцип действия которого основан на измерении падения давления в капиллярной трубке, через которую протекает ламинарный поток жидкости, вязкость которой подлежит регулировке, а также регуляторы фирмы «VAF-Вискотерм», схема установки которых приведена на рис. 103.
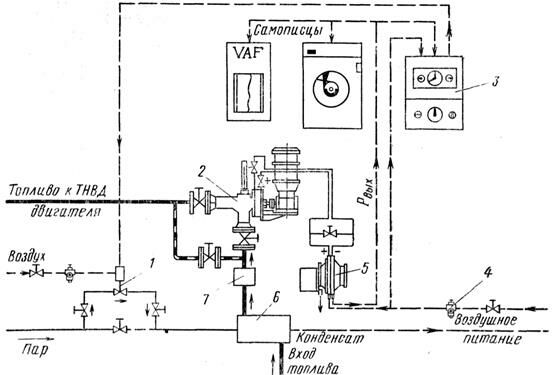
Рис. 103. Схема установки регулятора вязкости топлива:
1 — паровой регулирующий клапан; 2 — чувствительный элемент; 3 — станция управления; 4 — воздушный фильтр с редуктором; 5 — датчик перепада давлений;
6 — подогреватель топлива; 7 — топливный фильтр
Из расходной цистерны топливоподкачивающий насос подает тяжелое топливо через подогреватель 6 и фильтр 7 к чувствительному элементу 2 и далее к топливным насосам высокого давления. Чувствительный элемент, схема которого представлена на рис. 104, а, состоит из углового патрубка, внутри которого размещен шестеренный насос 1, приводимый во вращение от электродвигателя через редуктор. Насос 1 непрерывно забирает всегда постоянное количество топлива и прокачивает его через капиллярную трубку 2. Вследствие ламинарного движения топлива в капиллярной трубке перепад давления в ней прямо пропорционален вязкости топлива.
Сигнал перепада давлений Dpk поступает к датчику (рис. 104, б), который преобразует его таким образом, что выходное давление управляющего воздуха становится пропорциональным вязкости топлива. Далее выходной сигнал поступает в станцию управления, где действительное значение вязкости сравнивается с заданным. Воздух под давлением, пропорциональным заданному и действительному значению вязкости топлива, поступает к мембранному регулирующему клапану, изменяющему количество пара, поступающего к подогревателю, а, следовательно, температуру и вязкость топлива.
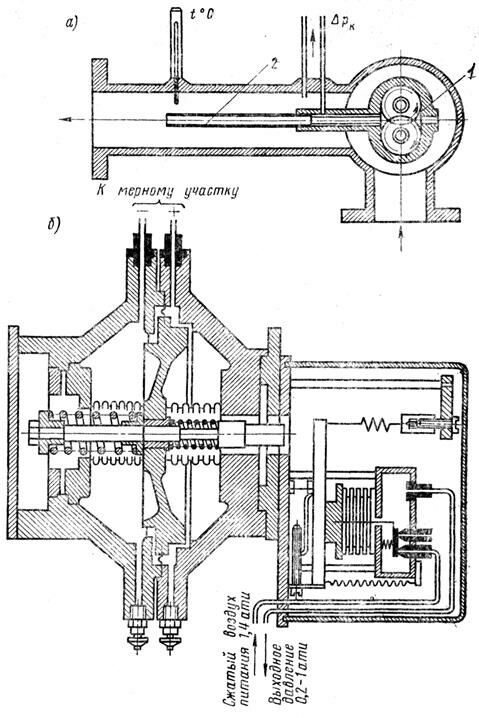
Рис. 104. Регулятор вязкости топлива:
а — схема чувствительного элемента; б — датчик перепада давления
7.6. Системы сигнализации и защиты
Для обеспечения безаварийной работы как главных, так и вспомогательных дизелей, а также для информации о протекающих в них процессах они оборудуются системами сигнализации и защиты.
Объем и состав сигнализации определяются конструкцией, назначением, условиями работы, а также надежностью двигателя.
В общем случае сигнализация и защита предусматриваются по следующим параметрам:
¾ температуре и давлению в системе охлаждения;
¾ температуре и давлению в системе смазки;
¾ уровню топлива, масла и пресной охлаждающей воды в цистернах;
¾ частоте вращения вала;
¾ температуре подшипников;
¾ температуре выпускных газов.
Для автоматизированных энергетических установок параметры, подлежащие индикации, сигнализации и аварийной защите, регламентируются требованиями Правил Морского Регистра СССР, и для судов с объемом автоматизации, соответствующим знаку А2, приведены в таблице.
ПАРАМЕТРЫ, ПОДЛЕЖАЩИЕ ИНДИКАЦИИ, СИГНАЛИЗАЦИИ
И ЗАЩИТЕ, ДЛЯ АВТОМАТИЗИРОВАННЫХ ДИЗЕЛЬНЫХ СУДОВ
| № п/п | Контролируемая величина | Индикация (показывающие приборы) | Сигнализация (АПС) | Защита: остановка или изменение режима |
| I. Двигатель | ||||
| 1. | Частота вращения главного двигателя (для реверсивных двигателей с указанием направ-ления вращения) | Постоянная | — | — |
| 2. | Температура выпускных газов на выходе из каждого цилиндра двигателя | Постоянная или по вызову | Высокая | — |
| 3. | Температура газов в выхлоп-ном коллекторе | Постоянная | ||
| 4. | Нагрузка двигателя | — | Высокая (р) | — |
| II. Топливная система | ||||
| 5. | Вязкость или температура топ-лива на входе в двигатель | — | Высокая, низкая | |
| 6. | Давление топлива перед насо-сом высокого давления | По вызову | — | — |
| 7. | Уровень в расходной цистерне | По вызову (р) | Низкий | — |
| 8. | Температура подогреваемого топлива в цистерне | По вызову (р) | Высокая | — |
| 9. | Уровень топлива в отстойных цистернах | По вызову (р) | Высокий | |
| 10. | Вибрация сепаратора | — | Повышение | Остановка сепаратора |
| 11. | Поток топлива в сепараторе | — | Отсутствие | — |
| III. Масляная система | ||||
| а) Система циркуляционной смазки | ||||
| 12. | Температура масла на входе в двигатель | Постоянная или по вызову | Высокая, низкая (т) | — |
| 13. | Температура масла на выходе из двигателя | Постоянная (р) | Высокая | — |
| 14. | Давление масла на входе в двигатель | Постоянная | Низкое | Остановка двигателей |
Продолжение
| № п/п | Контролируемая величина | Индикация (показывающие приборы) | Сигнализация (АПС) | Защита: остановка или изменение режима |
| 15. | Концентрация масляных паров в картере двигателя | — | Высокая | — |
| 16. | Уровень масла в сточной цир-куляционной системе | — | Низкий | — |
| 17. | Температура масла на входе в сепаратор | — | Высокая (р) | — |
| 18. | Вибрация сепаратора | — | Повышение | Остановка сепаратора |
| 19. | Поток масла в сепараторе | — | Отсутствие потока | — |
| б) Система смазки цилиндров | ||||
| 20. | Уровень масла в лубрикаторах | — | Низкий | — |
| в) Система смазки газотурбонагнетателя (ГТН) | ||||
| 21. | Температура масла на входе в ГТН | По вызову | Высокая | — |
| 22. | Давление масла на входе в ГТН | Постоянная или по вызову | Низкое | — |
| 23. | Уровень масла в напорной цистерне | — | Низкий | — |
| 24. | При смазке, замкнутой в ГТН: наличие потока температура масла | — — | Отсутствие (р) Высокая | — — |
| IV. Система охлаждения | ||||
| 25. | Температура охлаждающей жидкости на выходе из контура охлаждения форсунок | Постоянная или по вызову | Высокая | — |
| 26. | Температура охлаждающей жидкости на выходе из каждого цилиндра и поршня | По вызову | Высокая | — |
| 27. | Давление охлаждающей жид-кости на входе в каждый контур охлаждения | Постоянная | Низкое | Остановка двигателя (т) |
| 28. | Поток воды через каждый пор-шень | — | Уменьшение | — |
| 29. | Уровень воды в расширитель-ной цистерне | — | Низкий | — |
| V. Система забортной воды | ||||
| 30. | Температура забортной воды перед холодильниками | По вызову | — | — |
| 31. | Давление забортной воды | Постоянная | Низкое | — |
| VI. Система наддува | ||||
| 32. | Температура газов до и после ГТН | По вызову | — | — |
| 33. | Температура продувочного воздуха в ресивере | По вызову (р) | — | — |
| 34. | Частота вращения в ГТН | Постоянная | — | — |
Продолжение
| № п/п | Контролируемая величина | Индикация (показывающие приборы) | Сигнализация (АПС) | Защита: остановка или изменение режима |
| 35. | Давление воздуха в продувоч-ном ресивере | Постоянная | — | — |
| VII. Система пускового воздуха | ||||
| 36. | Давление воздуха в баллонах | Постоянная | Низкое | Запуск компрессора |
| 37. | Температура воздуха на выхо-де из компрессора | — | Высокая | — |
| 38. | Давление охлаждающей воды в компрессоре | — | Низкое | Остановка работающего компрессора |
| 39. | Давление масла в компрессоре | — | Низкое | Остановка работающего компрессора |
Примечание. В таблице даны следующие обозначения:
«Постоянная» — показание величины параметра должно производиться непрерывно;
«По вызову» — показание величины параметра должно производиться через определенные промежутки времени (обегающий контроль) или по требованию оператора;
для ЦПУ, расположенного вне машинных помещений: (р) — рекомендуется; (т) — требуется.
Автоматическая защита обычно воздействует либо на привод рейки топливных насосов, отключая подачу топлива в цилиндры двигателя, либо на устройство для изменения настройки регулятора частоты вращения.
В процессе эксплуатации встречаются такие случаи, когда даже в надвигающейся аварийной ситуации остановить главный двигатель невозможно, так как это может привести к гибели судна в целом (например, проход узкостей или каналов при штормовых условиях). В связи с этим защиты, как правило, выполняются отключаемыми. К неотключаемой защите относится только защита от превышения допускаемой частоты вращения вала, так как выход этого параметра за допустимые пределы приводит к разрушению двигателя.
Системы сигнализации и защиты выполняются независимыми от систем автоматического регулирования.
В состав систем сигнализации и защиты входят следующие элементы: чувствительные элементы и датчики, исполнительные устройства, сигнальные устройства, логические элементы и коммутационная аппаратура.
В качестве примера на рис. 105 показана одна из схем системы сигнализации и защиты, которая включает в себя местный пульт управления (МПУ), дистанционный пульт управления (ДПУ), стоп-устройство с электромагнитным приводом (СУ), звуковой сигнал (ЗС).
На МПУ расположены:
¾ реле давления масла (РДМ), реле температуры воды (РТВ), реле температуры масла (РТМ);
¾ катушки исполнительных реле (1РИ, 2РИ, ЗРИ);
¾ блокирующие контакты (2РИ4 и ЗРИ4);
¾ зеленая лампа (ЛЗ), красные лампы аварийного давления масла (ЛАДМ), аварийной температуры воды (ЛАТВ), аварийной температуры масла (ЛАТМ).
При работе без ДПУ к клеммам 1 и 10 подключаются стоп-устройство (СУ) и звуковой сигнал (ЗС). При работе с ДПУ к клеммам 1 и 10 подключают клеммы 6 и 7, стоп-устройство подключается к 4 и 5, а звуковой сигнал — к 8 и 9. Выключатель (ВКЛ) 2 служит для отключения защиты и сигнализации. Выключатель (ВКЛ) 3 служит для отключения защиты, а ПКЛ1 — отключает звуковой сигнал.
При нормальном состоянии системы горит одна зеленая лампа (ЛЗ). При возникновении аварийного состояния зеленая лампа гаснет, а загорается одна из ламп ЛАДМ, ЛАТВ или ЛАТМ, а также лампа сигнала «авария» — (ЛА).
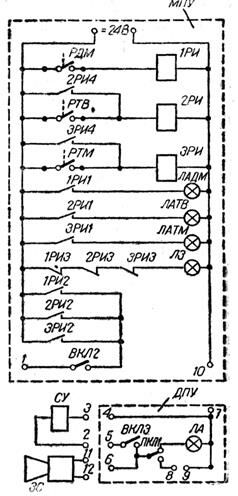
Рис. 105. Схема системы аварийной
сигнализации и защиты
Для предотвращения неправильных действий судового состава предусматривается также ряд блокировочных устройств, к числу которых относятся устройства, запрещающие:
¾ пуск дизеля при включенном валоповоротном устройстве;
¾ реверс работающего дизеля (при неотключенной подаче топлива);
¾ пуск в направлении, противоположном заданному машинным телеграфом, и др.
7.7. Системы дистанционного автоматизированного управления
Под дистанционным автоматизированным управлением (ДАУ) понимают устройство, позволяющее с помощью одного органа (рукоятки) осуществлять на расстоянии автоматическое управление (реверс, пуск, изменение скоростного режима и остановку) главным двигателем. При этом перемещение органа управления из любого начального в любое требуемое положение осуществляется без ограничения скорости и какой-либо выдержки в промежуточных положениях, а все промежуточные операции по выводу двигателя на заданный режим выполняются автоматически по заложенной в ДАУ программе.
На современных транспортных судах с мощными дизелями установлено более 30 типов ДАУ с различной номенклатурой выполняемых функций или с различным уровнем автоматизации процессов, сопутствующих управлению главным двигателем. Системы ДАУ с минимальной номенклатурой выполняют только операции автоматизированного реверса, пуска, изменения скоростного режима и остановки двигателя.
Системы ДАУ с более полной номенклатурой выполняют также операции, связанные с подготовкой главного двигателя и обслуживающих его механизмов и систем к пуску, а также осуществляют снижение мощности двигателя в случае отклонения параметров, характеризующих состояние и работу двигателя, за допустимые пределы. Помимо этого, на систему ДАУ возлагаются функции блокировок и аварийной защиты двигателя в случае отклонения основных параметров, характеризующих его работу, за допустимые пределы, когда автоматическое снижение мощности не приводит к желаемым результатам.
Систематизация функций, выполняемых основными системами ДАУ, позволяет свести их к следующим операциям:
1) подготовка двигателя к пуску;
2) автоматизированный пуск, включая повторные;
3) вывод двигателя на режим по нормальной и экстренной программе;
4) вывод двигателя на режим по замедленной программе;
5) автоматическое снижение мощности при выбеге основных параметров за допустимые пределы;
6) ускоренное прохождение зоны критических оборотов;
7) нормальный реверс двигателя;
8) экстренный реверс;
9) нормальная и экстренная остановка (вывод с режима) по программе;
10) защита от перегрузок, а также повышения температур, снижения давления масла, возникновения взрывоопасной концентрации масляных паров в картере и др.;
11) регистрация маневровых операций и установившихся параметров работы;
12) контроль работоспособности блоков ДАУ;
13) автоматическое переключение с ДАУ на ДУ или ручное управление при отказе ДАУ;
14) автоматическое включение аварийного питания;
15) обеспечение консерватизма системы, под которым понимается способность системы в случае выхода ее из строя оставаться в положении, предшествующем аварии.
Анализ повторяемости перечисленных функций в системах ДАУ различных конструкций позволяет сделать следующие выводы.
Функции, выполняемые основными системами, отличаются в значительной степени, при этом уровень автоматизации ДАУ, под которым будем понимать отношение количества функций, присущих данному типу ДАУ, к полному перечню их, изменяется от 0,85 до 0,21.
Это обстоятельство объясняется тем, что при назначении рационального уровня автоматизации системы ДАУ учитываются следующие факторы:
¾ тип судна, его размерения, район плавания и связанные с этим навигационные условия;
¾ надежность главного двигателя и обслуживающих его механизмов (чем эта надежность выше, тем меньше необходимость оборудования системы ДАУ различными средствами защиты);
¾ отнесение рассматриваемого типа ДАУ к одному определенному типу двигателя, обладающему определенным уровнем надежности, или установление того, что эта система ДАУ является универсальной, предназначенной для двигателей с различным уровнем надежности;
¾ надежность элементов, из которых собраны блоки и узлы ДАУ;
¾ организация труда плавсостава, под которой подразумевается наличие либо отсутствие постоянной вахты в ЦПУ либо в машинном отделении, а также другие факторы (береговое обслуживание, наличие ЗИПа, квалификация обслуживающего персонала).
Минимальный состав операций, которые должна выполнять система ДАУ, является следующим:
¾ автоматический пуск двигателя, включая и два повторных;
¾ вывод двигателя на режим по нормальной и экстренной программе;
¾ нормальный реверс;
¾ регистрация маневровых операций.
Остальные дополнительные функции выбираются с учетом высказанных ранее соображений.
По виду используемой энергии наибольшей популярностью пользуются ДАУ, в которых логическая часть выполнена на базе электронной аппаратуры, а исполнительная часть пневматическая.
Блок-схема одной из систем ДАУ главным двигателем дизеля приведена на рис. 106. По сравнению с приведенным ранее перечнем функций в этой системе ДАУ не предусматриваются такие, как автоматическая подготовка двигателя к пуску, автоматическое снижение мощности при выбеге основных параметров за допустимые пределы, ускоренное прохождение зоны критических оборотов, контроль работоспособности блоков ДАУ, автоматическое переключение с ДАУ на ДУ и автоматическое включение аварийного питания, т.е. отсутствуют 6 операций из приведенных 15.
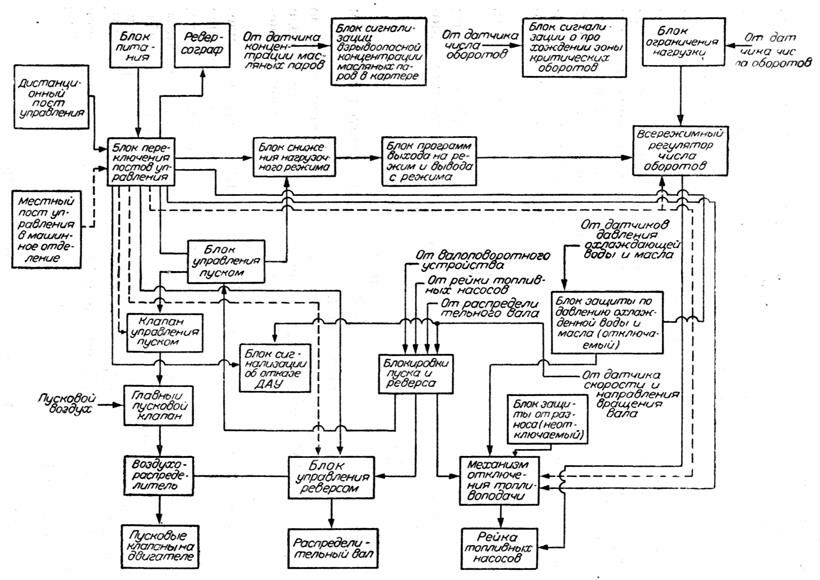
Рис. 106. Блок-схема системы ДАУ главным двигателем дизеля
7.8. Системы централизованного контроля (СЦК)
Второй, не менее существенной системой комплексно-автоматизированной энергетической установки является СЦК.
Сущность автоматизированного контроля заключается в том, что измерение и сравнение текущих значений параметров с предельно допустимыми, сигнализация об отклонениях и документирование результат9в контроля производятся без участия оператора (механика).
Визуальный контроль осуществляется по нескольким показывающим приборам, а также по выборочному вызову оператором параметров на табло индикации.
Для осуществления автоматизированного централизованного контроля устанавливают машины централизованного контроля (МЦК), которые совместно с датчиками, мнемосхемами и элементами предоставления информации образуют СЦК.
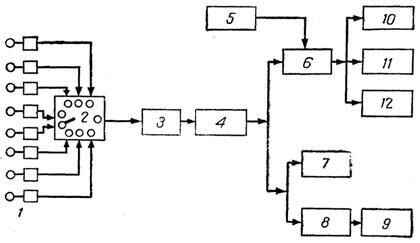
Рис. 107. Структурная схема системы централизованного контроля
Структурная схема СЦК приведена на рис. 107. Значения контролируемых величин, прошедшие датчики 1, поступают на обегающее устройство 2, которое соединяет поочередно на определенный промежуток времени каждый из каналов 1 с усилителем 3. После усиления сигнал поступает на преобразователь 4, где преобразуется в цифровой код. В устройстве сравнения 6 происходит сравнение действительного значения измеряемой величины с заданным или допустимым, которое хранится в памяти блока 5.
В случае отклонения измеряемой величины за допустимые пределы автоматически включается печатающее устройство аварийных значений 10, а также световая 11 и звуковая 12 сигнализации.
Печатающее устройство 7 регистрирует через заданные интервалы времени группу величин, подлежащих документированию (это те величины, которые вахтенный механик при вахтенной форме обслуживания заносил ежечасно в машинный журнал). Через устройство вызова 8 оператор может в любое время вызвать на табло 9 значение каждой из измеряемых машиной величин. Обычно табло 9 представляет собой цифровой индикатор, показывающий относительные значения (или проценты) измеряемой величины.
На т/х «Новгород» установлена МЦК «Датацент» фирмы AEG. МЦК контролирует 106 параметров главного двигателя. Скорость обегания — 5 точек в секунду. Через каждые 20 с МЦК совершает малый цикл обегания, контролируя наиболее ответственные параметры. Остальные параметры контролируются с различной периодичностью (в 1, 2, 5 и 10 мин).
Из отечественных МЦК на судах нашли применение МЦК «Алдан». Машины этой системы построены на полупроводниковых элементах по блочному принципу. Число параметров, контролируемых этой машиной, 81.
Рис. 108. Общий вид пульта управления главным двигателем в ЦПУ
Представление информации оператору осуществляется следующим образом. При отклонении параметра за предельное значение появляется световой сигнал в соответствующем месте мнемосхемы. Световой сигнал сопровождается звуковым.
При переходе на безвахтенную форму обслуживания энергетической установки дежурный механик имеет право находиться в каюте, кают-компании, столовой, а также в машинном отделении, т.е. при такой форме обслуживания механик не находится все время в ЦПУ и не получает непрерывно информации о состоянии энергетической установки. В связи с этим возникают дополнительные требования к системе централизованного контроля, которые сводятся к тому, чтобы дежурный механик при нахождении вне машинного отделения в случае возникновения аварийной ситуации мог бы получить максимальное количество информации.
В этом случае механик может сразу направиться к аварийному механизму, а за время следования принять необходимые решения. Осуществление такой информации можно представить себе с помощью так называемой системы обобщенного контроля, под которым подразумевается совокупность комплексных или обобщенных сигналов, извещающих дежурного механика о нарушении нормального технического состояния установки.
Конструктивно устройство обобщенного контроля можно представить себе в виде светового табло, на котором по горизонтальной оси будут расположены номера, соответствующие наименованию основных механизмов, обеспечивающих живучесть судна, а по вертикальной оси — тип контролируемых величин. Проработки показали, что для стандартного сухогрузного теплохода необходимая информация может быть обеспечена за счет 36 обобщенных сигналов. Щиты обобщенного контроля должны располагаться в местах, легкодоступных для обзора: в каютах механиков, кают-компании, жилых коридорах, в районе входов в машинное отделение.
В качестве примера приведена фотография ЦПУ т/х «Котовский» (рис. 108).
7.9. Перспективы развития автоматизации
Дальнейшее развитие автоматизации энергетических установок предусматривает в дополнение к машинам централизованного контроля (МЦК) установку на судах бортовых ЭЦВМ.
В результате совместного действия МЦК и ЭЦВМ создан информационно-управляющий вычислительный комплекс (ИУВК), предназначенный для осуществления диагностического контроля и управления судовыми техническими средствами.
Судовые бортовые ЭВМ на отдельных судах выполняют следующие функции:
¾ контроль за работой энергетических установок;
¾ управление энергетическими установками;
¾ контроль и управление электроэнергетическими установками;
¾ контроль и управление грузовыми операциями;
¾ навигационные задачи;
¾ новые функции: вычисление технико-экономических показателей, автоматическая диагностика неисправностей, оптимизация процессов.
Для выполнения новых функций предложена разработка и совершенствование алгоритмов диагностического контроля неисправностей основного оборудования энергетических установок, а также разработка математического обеспечения бортовой ЭЦВМ применительно к поставленным задачам, разработка и усовершенствование устройств сбора и преобразования первичной информации, ввода и вывода ее в ЭЦВМ, разработка устройств предоставления оператору обобщенной информации.
В дальнейшем, с совершенствованием и отладкой алгоритмов и средств диагностического контроля, появится возможность перейти от планово-предупредительных ремонтов и вскрытий механизмов, сроки выполнения которых определяются на базе среднестатистических данных по более или менее близким в конструктивном отношении механизмам, а потому не всегда совпадают с технической необходимостью, к профилактическому обслуживанию по потребности.
Одновременно с этим осуществляется сбор и надлежащая обработка достоверных технико-эксплуатационных данных о работе и неисправностях автоматизированного оборудования, которые позволят вскрыть наиболее слабые узлы этого оборудования, довести и улучшить его конструкцию и наладить эффективную эксплуатацию.
Применение ИУВК позволяет сократить в дальнейшем объем аппаратуры систем автоматики за счет замены параллельно функционирующих блоков быстродействующими устройствами последовательного действия либо расширить объем выполняемых задач при сохранении существующего количества аппаратуры.
Одновременно с этим применение ИУВК позволяет улучшить эксплуатационные характеристики судовых технических средств за счет решения таких задач, выполнение которых традиционными средствами малоэффективно либо вообще невозможно, а также за счет обеспечения межсистемной унификации и повышенной модернизационной способности автоматических систем. К числу таких задач можно отнести техническую диагностику оборудования, программное управление группами технических средств, подготовку и представление оператору информации в рациональном объеме и форме.
На современных судах установлены многоцелевые вычислительные комплексы. В задачи вычислительного комплекса входит:
¾ определение места судна по данным спутниковой навигационной системы и по счислению;
¾ выполнение расчетов по прокладке курса судна;
¾ выбор навыгоднейшего курса судна в зависимости от ожидаемых и фактических метеорологических условий;
¾ расчет по данным радиолокационной станции маневра, необходимого для избежания столкновения со встречным судном;
¾ непрерывное определение фактического к.п.д. энергетической установки (ЭУ) в целом и отдельных ее агрегатов, сравнение полученных значений с оптимальными для данных условий плавания, выявление элементов ЭУ, к.п.д. которых оказался пониженным, и определение мер, необходимых для его повышения;
¾ установление обоснованных сроков работ по техническому обслуживанию ЭУ;
¾ управление судовой холодильной установкой и контроль за условиями в рефрижераторных трюмах.
Сроки технического обслуживания (осмотры, профилактические и ремонтные работы) рассчитываются ЭВМ по каждому агрегату и устройству ЭУ в отдельности. При этом в ЭВМ вводятся данные о фактическом количестве часов работы различных механизмов, о проведенных работах по их техническому обслуживанию, выполненных экипажем, о техническом состоянии и износе оборудования.
По результатам обработки этих данных корректируется периодичность и устанавливаются сроки выполнения осмотров и ремонтов, автоматически регистрируемые ЭВМ в специальном журнале технического обслуживания ЭУ, который является руководящим материалом для плавсостава, работников пароходства при планировании сроков профилактических работ и ремонта.
Исходным материалом для разработки данного многоцелевого вычислительного комплекса послужили данные о положительных результатах эксплуатации опытного вычислительного комплекса, установленного на итальянском сухогрузном судне «Esquilino».
Обратите внимание на лекцию "2 Реляционные базы данных".
Касаясь экономической эффективности автоматизации, одна из шведских компаний сообщает, что за счет автоматизации процессов судовождения и грузовых операций на танкерах дедвейтом 250 000 т, эксплуатирующихся на линии Персидский залив — Роттердам, достигается экономия эксплуатационного времени на 1,8% по сравнению с судами, на которых эти процессы не автоматизированы.
Эта экономия достигается за счет повышения точности навигационных вычислений (1%), за счет повышения точности удержания судна на курсе (0,5%) и в результате автоматизации грузовых операций (0,3%).
Указанный выигрыш во времени дает дополнительную годовую прибыль в размере от 60 000 до 380 000 долларов в зависимости от величины фрахтовых ставок.
Стоимость автоматизации, обеспечивающей указанный экономический эффект, составляет около 1 % от строительной стоимости судна.
Вопросы для самоконтроля:
- Что означает символ А2 в соответствии с требованиями Регистра Морского судоходства и что он предусматривает в этой связи?
- Как классифицируются регуляторы частоты вращения?
- Каким образом действует изодромная обратная связь?
- Объяснить регулировку частоты вращения параллельно работающих дизелей.
- Системы централизованного контроля (СЦК), их назначение.
Литература [7].




















