
Общие сведения о системах автоматического регулирования
РАЗДЕЛ I
ОСНОВНЫЕ ПОЛОЖЕНИЯ ТЕОРИИ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
ГЛАВА 1
Общие сведения о системах автоматического регулирования
1.1. Автоматизация и механизация
Судовые энергетические установки эксплуатируются в специфических условиях, в значительной степени отличающихся от береговых. Это объясняется действием качки в штормовых условиях, высокой температуры и влажного воздуха при плавании в тропических широтах, ограниченными габаритами судовых помещений и рядом других обстоятельств. Одновременно с этим к процессам управления и контроля предъявляются такие высокие требования, что человек в силу ограниченности своих физиологических возможностей не всегда в состоянии им удовлетворить, в результате чего эффективность эксплуатации установки, особенно в аварийных ситуациях, заметно снижается.
Для повышения эффективности эксплуатации энергетических установок применяют автоматизацию и механизацию производственных процессов, операций обслуживания и управления, т.е. создают устройства, заменяющие человека в сфере обслуживания управления и контроля производственного процесса.
Рекомендуемые материалы
Механизация производственного процесса заменяет мускульную силу человека силой машин. Автоматизация заменяет отдельные операции, связанные с умственной деятельностью человека, позволяя возложить на автоматические устройства функции управления и контроля. Автоматизация производственных процессов является высшей завершающей формой развития машинного производства.
Системы, в которых осуществляется автоматическое поддержание постоянного значения регулируемой величины или изменение ее по заданному закону при различных режимах работы, называются системами автоматического регулирования САР.
Автоматика — отрасль науки и техники, охватывающая совокупность технических средств и методов, обеспечивающих освобождение человека от непосредственного участия в производственном процессе в части, связанной с выполнением функций контроля и управления процессами.
Автоматическое устройство — устройство, осуществляющее управление и (или) контроль производственного процесса в зависимости от заданных условий и обеспечивающее освобождение человека от выполнения им этих функций.
Теоретической основой автоматизации является техническая кибернетика. Она рассматривает технические системы и изучает законы управления ими.
1.2. Элементы систем автоматического регулирования
Всякий автоматический регулятор состоит из отдельных элементов или узлов, предназначенных для выполнения определенных действий. Несмотря на многообразие конструктивных типов и принципов действия автоматических регуляторов, их элементы могут быть классифицированы и представлены по назначению в схемах систем автоматического регулирования (САР) в виде следующих звеньев.
3адающее устройство, служащее для задания желаемого значения регулируемой величины.
В качестве задающего устройства механических регуляторов применяются пружины, изменяя натяжение которых можно менять заданное значение регулируемой величины. В системах программного регулирования задающие устройства управляют системой в зависимости от введенной программы, изменяя которую можно задавать различные законы изменения регулируемой величины.
Приемное устройство (или чувствительный элемент), предназначающееся для измерения действительного значения регулируемой величины.
Устройство сравнения, предназначенное для сравнения измеряемого значения регулируемой величины с ее заданным значением.
Усилительное устройство, предназначенное для усиления слабого сигнала, поступающего из устройства сравнения, до величины, достаточной для приведения в действие исполнительного устройства регулятора.
Исполнительное устройство, служащее для перемещения регулирующего органа.
Корректирующее устройство, предназначенное для улучшения динамических характеристик САР.
В отдельных элементах регулятора могут применяться преобразующие устройства, предназначенные для трансформации различных физических величин в тот род сигнала, который принят в данной схеме регулятора.
1.2.1. Чувствительные элементы и датчики
Чувствительный элемент является неотъемлемой частью каждого автоматического регулятора. Чувствительные элементы классифицируются в зависимости от физической природы входной и выходной величины (электрический или неэлектрический вход и выход), а также по измеряемой ими величине (уровень давления, температура, расход).
Для получения электрического сигнала, пропорционального измеряемой величины, первичный чувствительный элемент сопрягают с преобразующим устройством или датчиком. Схема такого сопряжения показана на рис. 1. Рассмотрим кратко основные типы датчиков.

Рис. 1. Схема сопряжения первичного чувствительного элемента с датчиком:
х1 – входной сигнал; х2 – выходной сигнал чувствительного
элемента; х3 – выходной сигнал датчика
Контактные датчики применяются в релейных САР и предназначены для преобразования линейных либо угловых перемещений чувствительного элемента в электрический сигнал.

Рис. 2. Схемы контактных датчиков:
а – одностороннего; б - двустороннего
Различают односторонние и двусторонние контактные датчики. Принцип действия таких датчиков показан на рис. 2. Нечувствительность контактного датчика определяется величиной зазора d.
К датчикам, работающим на принципе изменения омического сопротивления, относятся потенциометрические, угольные, тензометрические и др.
Потенциометрические или реостатные датчики преобразуют угловое или линейное перемещение в электрическое напряжение (рис. 3). Зависимость между выходной xвых или входной xвх величинами определяется соотношением
 , (1)
, (1)
где а — перемещение движка потенциометра;
аmax — полная длина рабочей части потенциометра.
Если необходимо, чтобы датчик реагировал на знак входного перемещения, надо выполнить его по схеме, приведенной на рис. 3, б.
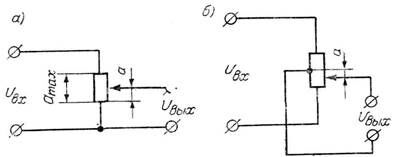
Рис. 3. Схемы потенциометрических датчиков:
а – одноконтактного; б - двуконтактного
Тензометры изготавливаются из проволоки диаметром в несколько десятков микрон (рис. 4, а, б) либо из фольги (рис. 4, в). Тензометры приклеивают к детали, деформацию которой необходимо измерить. При деформации детали происходит также деформация проволочек тензометра, в результате чего изменяется их поперечное сечение, длина, удельное сопротивление.

Рис. 4. Схемы тензометрических датчиков:
а, б – проволочных; в – из фольги
Принцип действия индуктивных датчиков основан на изменении индуктивного сопротивления катушки с железным сердечком при перемещении железного якоря. На рис. 5 показано схематическое устройство такого датчика. Входной координатой этого датчика является зазор d, а выходной – ток в катушке. Сила тока в цепи переменного тока определяется из выражения
 , (2)
, (2)
где R — омическое или активное сопротивления катушки;
n — частота переменного тока;
U0 — напряжение в сети переменного тока;
L — индуктивность катушки.
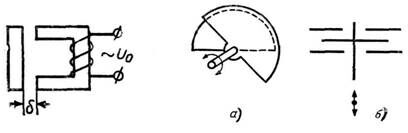
Рис. 5. Схема индуктивного Рис. 6. Схемы емкостных
датчика датчиков
Емкостный датчик представляет собой конденсатор, емкость которого зависит от площади пластин, расстояния между ними и диэлектрической проницаемости среды между пластинами. На рис. 6, а показан датчик с изменяемой площадью пластин, а на рис. 6, б – с изменяемым расстоянием между пластинами.
Магнитоупругий датчик состоит из магнитопровода, на котором расположена индуктивная катушка (рис. 7). При сжатии магнитопровода его магнитная проницаемость изменится, в результате чего изменится полное электрическое сопротивление катушки, помещенной в цепи переменного тока.

Рис. 7. Схема магнитоупругого Рис. 8. Схема пьезо-
датчика электрического датчика
В пьезоэлектрических датчиках (рис. 8) использован эффект появления зарядов на гранях некоторых кристаллов (турмалин, кварц, сегнетова соль) при их механической деформации. Для увеличения чувствительности датчик составляют из нескольких пластин.
Для измерения частоты вращения широко применяются датчики частоты вращения или тахометрические генераторы постоянного и переменного тока. Напряжение, снимаемое с коллектора тахометрического генератора, пропорционально частоте вращения ротора.
Для передачи на расстояние углового перемещения какого-либо вала используются датчики углового перемещения или сельсины. В конструктивном отношении сельсин представляет собой электрическую машину, на роторе (статоре) которая размещена однофазная обмотка возбуждения, а на статоре (роторе) – трехфазная обмотка синхронизации. В том случае, если передаваемый крутящий момент имеет небольшое значение, сельсины включаются по схеме индикаторного режима. При больших значениях передаваемого крутящего момента включение осуществляется по трансформаторной схеме. Схема включения сельсинной пары при работе в индикаторном режиме приведена на рис. 9. Ротор сельсина-датчика СД связан с командной осью. Ротор сельсина-приемника СП связан с исполнительной осью.
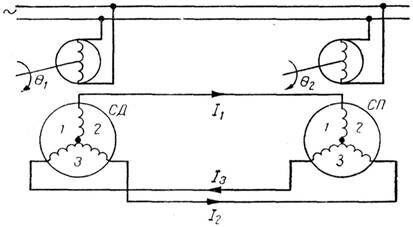
Рис. 9. Схема датчика углового перемещения
При равенстве углов q1 и q2 ротора датчика и приемника ЭДС в соответствующих обмотках статора приемника и датчика совпадают как по фазе, так и по величине. Так как эти обмотки включены навстречу друг другу, то токи в обмотках и проводах соединительных линий отсутствуют и система находится в равновесии. При нарушении равенства углов q1 и q2 ЭДС соответствующих статорных обмоток датчика и приемника не будут равны. В связи с этим под влиянием разности ЭДС в соединительных проводах появятся токи, возникнут соответствующие вращающие моменты, которые будут действовать до тех пор, пока сельсина-приемника не повернется на тот же угол, на который был повернут сельсин-датчик.
1.2.2. Усилители
В том случае, когда сигналы, получаемые от датчиков, недостаточны для перемещения регулирующего органа, в САР применяются усилительные устройства. Основной характеристикой усилителя является коэффициент усиления по мощности:
 , (3)
, (3)
где Р1, Р2 — соответственно входная и выходная мощности усилителя в номинальном режиме работы.
В САР применяются электрические, гидравлические, пневматические, а также комбинированные усилители.
По принципу действия электрические усилители делятся на магнитные, электронные и электромашинные.

Рис. 10. Принципиальная схема магнитного усилителя
Принцип действия магнитных усилителей основан на свойстве дросселя с железным сердечником изменять свою индуктивность при подмагничивании его постоянным током. Схема магнитного усилителя представлена на рис. 10. Простейший магнитный усилитель или дроссель насыщения состоит из железного сердечника, на котором намотаны две обмотки. В управляющую обмотку I подается постоянный ток подмагничивания, а обмотка II включена последовательно с нагрузкой в цепь переменного тока.
Полное сопротивление цепи переменного тока складывается из омического R и индуктивного nL сопротивлений. За счет изменения постоянного тока подмагничивания, протекающего через управляющую обмотку I, можно в широком диапазоне менять индуктивное сопротивление, а, следовательно, и величину переменного тока. Рассмотренная схема магнитного усилителя не пригодна для практических целей из-за наличия тока холостого хода в цепи нагрузки при отсутствии управляющего сигнала; переменного тока большого напряжения в обмотке постоянного тока.
Для устранения переменного тока большого напряжения в управляющей обмотке применяют двухдроссельные магнитные усилители (рис. 11), достоинствами которых являются высокая надежность, простота в эксплуатации, отсутствие подвижных деталей, высокий к.п.д. Недостатком их является значительная инерционность.

Рис. 11. Схема двухдроссельного магнитного усилителя
В последние годы начали получать широкое применение также усилители на полупроводниковых элементах.
Электромашинные усилители (ЭМУ) находят широкое применение в системах автоматического регулирования и управления, в следящих системах и автоматизированном электроприводе. ЭМУ имеют достаточно большой коэффициент усиления (до 10 000). В качестве простейшего ЭМУ может быть использована машина постоянного тока с независимым возбуждением, однако коэффициент усиления по мощности такого ЭМУ не превышает 20-50.
Наиболее широкое распространение получили ЭМУ с поперечным полем, представляющие собой генераторы постоянного тока с двумя ступенями усиления. Генератор приводится во вращение электродвигателем постоянного или переменного тока. Возбуждение усилителя осуществляется от обмоток управления, которые имеют независимое питание.
Принцип действия такого ЭМУ (рис. 12) заключается в следующем. Если к обмотке управления подвести небольшую мощность и создать тем самым магнитный поток, то при вращении якоря в его проводниках будет наводиться ЭДС. В связи с тем, что сопротивления обмотки якоря и короткозамкнутого витка имеют малую величину ток, протекающий в короткозамкнутом витке, будет достаточно большой силы. В результате будет создаваться магнитный поток, под действием которого в проводниках якоря наводится ЭДС и возникает ток нагрузки электромашинного усилителя. Созданная током продольная реакция якоря компенсируется действием обмотки, в результате чего первичный поток не будет зависеть от тока.
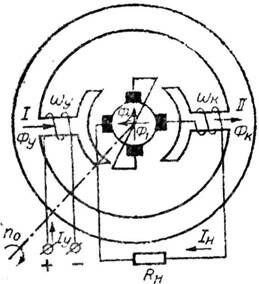
Рис. 12. Схема электромашинного усилителя
(ЭМУ) с поперечным полем
В данном усилителе первая ступень усиливает мощность Py = Iy Uy до мощности P2 = = I2 Е2, а вторая ступень усиливает мощность P2 до мощности Pвых = Iн Uвых. Применяющиеся ЭМУ с поперечным полем имеют большой диапазон выходных мощностей (от сотен ватт до десятков киловатт). Конструктивно электромашинный усилитель и приводной двигатель выполняются в одном агрегате.
На рис. 13 показана схема гидравлического усилительно-силового устройства, состоящего из отсечного золотника и гидравлического сервопоршня. При перемещении золотника вверх или вниз от равновесного положения масло под рабочим давлением Р1 поступает либо в верхнюю, либо в нижнюю полости цилиндра, а из противоположных полостей масло поршнем вытесняется на слив.
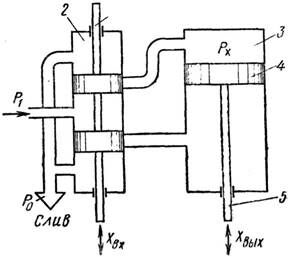
Рис. 13. Схема гидравлического усилителя с отсечным золотником:
1 – золотник; 2 – цилиндр; 3 – силовой цилиндр; 4 – сервопоршень; 5 - шток
Принцип действия струйной трубки может быть пояснен схемой, показанной на рис. 15. Жидкость либо воздух под давлением поступает из струйной трубки во входные каналы. В зависимости от отклонения струйной трубки будет изменяться давление в каналах и полостях силового цилиндра. Сервопоршень со штоком при наличии перепада давления между полостями будет перемещаться в ту либо другую сторону.
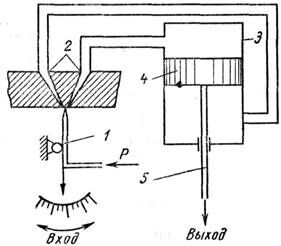
Рис. 14. Схема усилителя со струйной трубкой:
1 – струйная трубка; 2 – входные каналы;
3 – силовой цилиндр; 4 – сервопоршень; 5 - шток
Принцип работы дросселя переменного сечения рассмотрим на рис. 15. Рабочая жидкость (либо воздух) под постоянным давлением подается в усилитель через дроссели 3 и 2 на слив. В зависимости от положения заслонки в пространстве между дросселями, а также в подпоршневой полости сервомотора устанавливается давление Р. Так как поршень сервомотора находится в равновесии под действием усилия пружины сверху и давления рабочей среды снизу, то он будет перемещаться в зависимости от величины этого давления Р, определяемого в свою очередь положением заслонки.

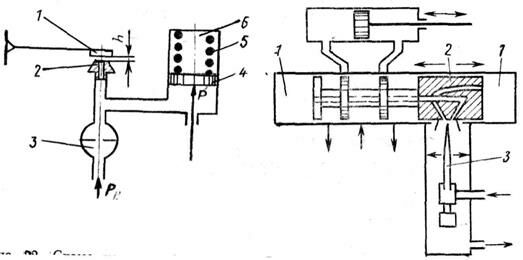
Рис. 15. Схема усилителя с дросселем Рис. 16. Схема двухкаскадного усилителя:
переменного сечения: 1 – торцевые камеры; 2 – золотник;
1 – заслонка; 2, 3 – дроссели; 4 – серво- 3 - струйная трубка
поршень; 5 – пружина; 6 - серводвигатель
При необходимости получения больших коэффициентов усиления применяют двух- или многокаскадное усиление.
Схема двухкаскадного усилителя типа «струйная трубка — отсечный золотник» приведена на рис. 16.
Здесь струйная трубка управляет перемещением золотника, который в свою очередь управляет сервопоршнем. При перемещении струйной трубки создается повышенное давление в правой либо левой торцевой камере, в результате чего золотник переместится в левую либо правую сторону.
1.2.3. Электромагнитные реле
Электромагнитные реле представляют собой устройства, в которых при определенных значениях входного сигнала происходит скачкообразное изменение выходной величины. Схема электромагнитного нейтрального реле, которое одинаково срабатывает независимо от полярности тока, показана на рис. 17. При прохождении тока по катушке якорь притягивается к сердечнику и замыкает правую пару контактов. При прекращении питания пружина перебрасывает якорь, размыкает правые контакты и замыкает левые.

Рис. 17. Схема электромагнитного нейтрального реле:
1 – катушка; 2 – пружина; 3 – контакты; 4 - якорь
Схема трехпозиционного поляризованного реле показана на рис. 18. При отсутствии питания катушки якорь, расположенный между полюсами магнита, находится в среднем положении. В зависимости от полярности тока, подаваемого на катушку, якорь переместится в правое или левое положение, замыкая соответственно правую или левую пару контактов.

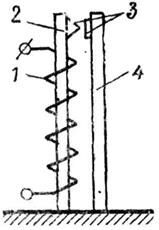
Рис. 18. Схема поляризованного реле: Рис. 19. Схема электро-
1 – катушка; 2 – контакты; 3 – магнит; 4 – якорь термического реле:
1 – обмотка; 2, 4 – биметаллические
пластинки; 3 - контакты
Помимо электромагнитных, широкое распространение получили также электротермические реле (рис. 19). При пропускании тока по обмотке с большим омическим сопротивлением выделяется тепло, под действием которого биметаллическая пластинка нагревается, изгибается и замыкает контакты. Для устранения влияния температуры окружающей среды правая пластинка выполнена также из биметалла.
1.3. Объекты регулирования
Несмотря на различие в устройстве и принципе действия объектов регулирования, статические и динамические свойства, а, следовательно, и поведение их в переходных процессах можно в большинстве случаев описать одним из типовых дифференциальных уравнений, которое дает математическое выражение физического закона, определяющего работу рассматриваемого объекта. Под объектом регулирования понимается машина, аппарат, устройство или система, в которых осуществляется регулирование одной или нескольких величин, называемых регулируемыми величинами.
По структуре объекты регулирования можно разделить на простейшие — одноемкостные и более сложные — многоемкостные. Работа объекта связана с преобразованием энергии или рабочего вещества. Способность объекта накапливать внутри себя рабочее вещество или энергию называется аккумулирующей способностью.
В том случае, когда объект имеет только один участок, в котором может накапливаться рабочее вещество или энергия, он называется одноемкостным объектом. Динамика одноемкостного объекта описывается дифференциальным уравнением 1-го порядка.
При наличии нескольких участков, в которых может аккумулироваться вещество или энергия, причем перетекание энергии или вещества из одного участка в другой происходит через сопротивление, объект будет называться многоемкостным. Схема двухъемкостного объекта показана на рис. 20.
Динамика многоемкостных объектов описывается дифференциальными уравнениями более высоких порядков. Для математического описания многоемкостного объекта необходимо рассматривать каждую из емкостей в отдельности с учетом взаимного влияния их друг на друга.

Рис. 20. Схема двухъемкостного объекта регулирования:
Q1 - приток рабочего вещества; Q2 - расход рабочего вещества;
Н1 и Н2 - уровни рабочего вещества; I и II - емкости
Входной координатой объекта регулирования является положение регулирующего органа, на который воздействует автоматический регулятор. Выходной координатой является регулируемая величина. Кроме того, на объект регулирования действуют внешние возмущения.

а) 6) в)
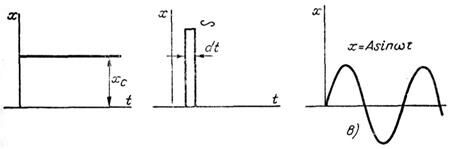
Рис. 21. Типовые возмущающие воздействия:
а - ступенчатое; 6 - импульсное; в - гармоническое
При изменении внешней нагрузки или при изменении положения регулирующего органа происходит изменение регулируемой величины на выходе объекта регулирования.
Изменение регулируемой величины во времени при изменении нагрузки или положения регулирующего органа называется переходным процессом.
Очевидно, что характеристики переходного процесса будут изменяться в зависимости от вида возмущающего воздействия. Для возможности сопоставления результатов при исследованиях на вход объекта подают так называемые типовые возмущающие воздействия, к числу которых относятся ступенчатое, импульсное и гармоническое. Схемы указанных возмущающих воздействий приведены на рис. 21. В большинстве случаев исследование переходных процессов производится при резком скачкообразном изменении положения регулирующего органа на небольшую величину, т.е. при ступенчатом возмущении. Такой характер возмущения является одним из наиболее сильных и позволяет по характеру переходного процесса, т.е. по изменению регулируемой величины во времени от одного установившегося режима до другого, определить статические и динамические свойства объекта регулирования.
1.3.1. Дифференциальное уравнение динамики объекта
Выведем дифференциальное уравнение переходного процесса, справедливое для основных одноемкостных объектов регулирования. Физические процессы, протекающие в объектах регулирования, могут быть описаны следующим обобщенным уравнением:
 (4)
(4)
где t — время;
, q и B — обобщенные величины.
Величина q является регулируемой, величина B характеризует результирующее энергетическое воздействие, изменяемое при помощи регулирующего органа, а величина L характеризует собственные свойства объекта. В общем случае параметр B равен разности притока (поступающей) Qпр энергии и расхода (потребляемой) Qр энергии, т.е. B = Qпр - Qр. При установившемся режиме B = 0
Допустим, что в некоторый момент времени произошло мгновенное небольшое изменение притока и расхода энергии на величину DQ, т.е.
 (5)
(5)
где  и
и  — начальные значения притока и расхода энергии.
— начальные значения притока и расхода энергии.
В результате изменения притока и расхода энергии величина регулируемого параметра также изменится на величину Dq.
Запишем уравнение (4) в приращениях для этого возмущенного состояния:
 . (6)
. (6)
Будем считать, что приток энергии Qпр зависит от положения регулирующего органа l и значения регулируемой величины q, а расход энергии Qр — только от значения регулируемой величины q, т.е. что
 . (7)
. (7)
В общем случае указанные зависимости (7) являются нелинейными, в результате чего аналитическое исследование процесса сильно усложняется, а в некоторых случаях вообще не представляется возможным, т.е. решение уравнений динамики не может быть представлено в общем виде. Однако, учитывая, что в течение переходного процесса происходят малые отклонения регулируемых величин от их установившихся значений, действительные нелинейные зависимости в большинстве случаев можно заменить линейными. Такая операция замены нелинейных зависимостей линейными при малых отклонениях величин носит название линеаризация. Для линеаризации этих функций разложим их в ряд Тейлора и учтем только первые члены разложений:
 (8)
(8)
Подставляя выражение (8) в уравнение (5), получим:
 (9)
(9)
В выражениях (8) и (9) индекс нуль, стоящий у скобки, указывает на то, что значения производных определяются при исходном установившемся режиме, и, следовательно, эти значения являются постоянными величинами.
Подставим выражение (9) в уравнение (6):
 .
.
Перенесем члены уравнения, содержащие Dq, в левую сторону:
 .
.
Поделив все члены уравнения на выражение в квадратной скобке, получим:
 . (10)
. (10)
Введя обозначения:
 ; (11)
; (11)
 ; (12)
; (12)
х = D l — приращение координаты регулирующего органа;
y = D q — приращение регулируемого параметра,
получим уравнение одноемкостного объекта в следующем виде:
 . (13)
. (13)
Величина Т0 называется постоянной времени объекта, а k1 — коэффициентом усиления.
Операторная форма записи дифференциальных уравнений. Если в дифференциальном уравнении заменить знак производной символом p, т.е. обозначить:
 , (14)
, (14)
то производные при этом можно представить как
 . (15)
. (15)
Для операции интегрирования действительны соответственно обратные обозначения:
 и т.д. (16)
и т.д. (16)
В этом случае произвольное дифференциальное уравнение 3-го порядка, правая часть которого имеет также дифференциальную форму,
 , (17)
, (17)
в операторной форме может быть представлено так:
 . (18)
. (18)
Полином  называют собственным оператором, а полином
называют собственным оператором, а полином  – оператором воздействия.
– оператором воздействия.
В общем виде уравнение (18) можно представить в такой форме:
 , (19)
, (19)
где d(p) — собственный оператор;
k(p) — оператор воздействия.
Если собственный оператор приравнять к нулю, получается характеристическое уравнение.
Полученное ранее дифференциальное уравнение объекта в операторной форме запишется следующим образом:
 . (20)
. (20)
1.3.2. Решение дифференциального уравнения
Общим решением неоднородного дифференциального уравнения является сумма, состоящая из общего решения однородного уравнения ус и частного решения неоднородного уравнения уb, т.е.
 . (21)
. (21)
Общее решение однородного уравнения порядка n ищут в виде:
 , (22)
, (22)
где p1, p2 … pn — корни соответствующего ему характеристического уравнения.
Частное решение неоднородного уравнения в общем случае ищется с учетом вида правой части. При исследовании звеньев САР частное решение неоднородного уравнения обычно ищу для случая, когда приложенное скачкообразное внешнее воздействие (см. рис. 21) сохраняется постоянным во времени, т.е.
 . (23)
. (23)
Постоянные интегрирования С1, С2 … Сn определяют из начальных условий, которые можно принять нулевыми т.е. при t = 0,
 и т. д. (24)
и т. д. (24)
Применим изложенную методику к решению уравнения объекта (13).
Соответствующее уравнению (20)характеристическое уравнение  будет иметь один корень
будет иметь один корень  .
.
Тогда
 . (25)
. (25)
Частное решение неоднородного уравнения ищем в виде:
подставляя значения  и
и  в уравнение (13), получим:
в уравнение (13), получим:

и, следовательно,
 .
.
Исходя из нулевых начальных условий, т.е. при t = 0 y = 0, получим  или
или  .
.
В окончательном виде решение уравнения (13) или его переходная функция будет:
 . (26)
. (26)
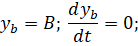
Графически переходной процесс, соответствующий переходной функции (26), будет иметь вид экспоненты, изображенной на рис. 22.
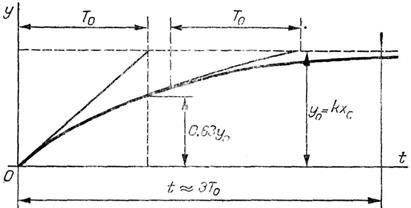
Рис. 22. График переходного процесса
Коэффициент усиления k показывает зависимость выходной координаты от входной при различных установившихся режимах.
Постоянная времени Т0 характеризует скорость изменения регулируемой величины в переходном процессе. Для экспоненциальной функции такого вида Т0 будет являться проекцией касательной, проведенной в любой точке экспоненты на линию установившегося значения  .
.
Теоретически переходный процесс продолжается бесконечно долго. В практических инженерных расчетах принимают, что переходный процесс закончится, когда регулируемая величина достигнет значения:
 . (27)
. (27)
Подставляя это значение в выражение (26), можем определить продолжительность переходного процесса в зависимости от величины п:
 . (28)
. (28)
В практических расчетах принимают п = (0,99÷0,95). Для этих значений продолжительность переходного процесса соответственно будет:  = 4,6 Т0 и = 3 Т0.
= 4,6 Т0 и = 3 Т0.
1.4. Автоматические регуляторы
Автоматический регулятор формирует закон регулирования и обеспечивает заданные динамические свойства САР. Автоматические регуляторы разделяются на регуляторы прямого и непрямого действия. В регуляторах непрямого действия перемещение регулирующего органа осуществляется за счет энергии постороннего источника, в зависимости от вида которой различают электрические, пневматические, гидравлические и комбинированные регуляторы.
В общем случае регулятор можно отнести к колебательному звену, динамика которого описывается уравнением 2-го порядка [см. уравнение (50)]. Однако в связи с тем, что постоянные времени Т1 и Т2 в уравнении (50) обычно во много раз меньше постоянной времени объекта Т0, в практических расчетах ими часто пренебрегают и считают регулятор идеальным звеном [см. уравнение (29)].
В зависимости от характеристики действия регуляторы делятся:
на статические или пропорциональные (П-регуляторы), в которых регулирующее воздействие пропорционально отклонению регулируемой величины; уравнение динамики идеального статического регулятора имеет вид:
 ; (29)
; (29)
на астатические или интегральные (И-регуляторы), у которых регулирующее воздействие пропорционально интегралу отклонения регулируемой величины; уравнение динамики идеального астатического регулятора имеет вид:
 ; (30)
; (30)
на изодромные или пропорционально-интегральные (ПИ-регуляторы), у которых регулирующее воздействие пропорционально отклонению и интегралу отклонения регулируемой величины; уравнение динамики идеального изодромного регулятора имеет вид:
 ; (31)
; (31)
на регуляторы с воздействием по производной (или ПД-регуляторы), у которых регулирующее воздействие пропорционально отклонению и производной отклонения регулируемой величины. Применяются также регуляторы, у которых регулирующее воздействие пропорционально отклонению, производной и интегралу отклонения регулируемой величины — изодромные с воздействием по производной (ПИД-регуляторы); уравнение динамики ПИД-регулятора имеет вид:
 . (32)
. (32)
1.4.1. Взаимодействие объекта и регулятора
Рассмотрим, как будут изменяться основные показатели переходного процесса в случае совместной работы объекта, обладающего положительным самовыражением, с различными типами регуляторов. Как следует из функциональной схемы, приведенной на рис. 23, к объекту приложено два воздействия: внешнее возмущение z(t) и регулирующее воздействие со стороны регулятора x(t).
Объект и статический регулятор (П-регулятор). Динамика САР может быть описана следующими уравнениями:
 (33)
(33)
Здесь kx и kz — коэффициенты усиления по рейке топливных насосов и нагрузке соответственyо; k1 и k2 — коэффициенты усиления регулятора.
Рис. 23. Функциональная схема САР:
у — регулируемая величина; z(t) — внешнее возмущение;
x(t) — регулирующее воздействие; g(t) — управляющее воздействие
Решая приведенную систему уравнений совместно, получим уравнение динамики САР:
 . (34)
. (34)
Из полученного уравнения следует, что постоянная времени, а, следовательно, и продолжительность переходного процесса, а также коэффициент усиления, а, следовательно, и ошибка регулирования с введением П-регулятора уменьшились по сравнению с таковыми у двигателей без регулятора.
Объект и астатический регулятор (И-регулятор). Динамика САР в этом случае может быть описана следующими уравнениями:
 (35)
(35)
Решая приведенную систему уравнений совместно, получим:
 . (36)
. (36)
Так как на вход системы подается ступенчатое возмущение z = zc = const, то рz = 0, а, следовательно, и k2pz = 0 (производная от постоянной величины). Левая часть уравнения стала дифференциальным уравнением 2-го порядка, а правая стала равной нулю. Следовательно, переходный процесс может быть колебательным либо апериодическим, но с нулевой ошибкой регулирования.
Объект и изодромный регулятор (ПИ-регулятор). Динамика САР может быть представлена следующей системой уравнений:
 (37)
(37)
решая систему совместно, получим:
 . (38)
. (38)
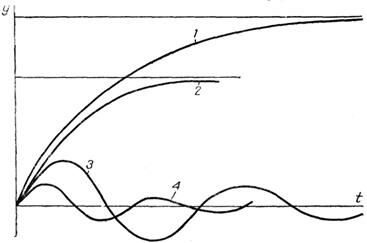
Рис. 24. Переходные процессы в САР:
1 — без регулятора; 2 — с П-регулятором;
3 — с И-регулятором; 4 — с ПИ-регулятором
Как и в предыдущем случае, так как z = zc =const, pz = 0, т.е. ошибка регулирования будет отсутствовать, а переходный процесс может иметь колебательный характер.
Результаты проведенных исследований показаны на рис. 24
1.4.2. Выбор типа и настройки регулятора
Как уже указывалось ранее, САР является динамической системой, статические и динамические характеристики которой (зависимость выходной величины от входной в статике и динамике) определяются характеристиками объекта регулирования и регулятора, а также типом возмущений.
Поэтому при выборе типа регулятора должны учитываться основные характеристики объекта, а также требования, предъявляемые к техническим показателям регулирования (продолжительность переходного процесса, колебательность, статическая и динамическая ошибки).
Так, объекты с большим коэффициентом самовыравнивания могут оборудоваться любым типом регулятора, и если нет особых требований к показателям переходного процесса, то для автоматического регулирования можно использовать простейшие П-регуляторы и И-регуляторы. При наличии больших запаздываний и в то же время медленно изменяющихся возмущениях обычно применяют ПИ-регуляторы, а при резких и частых возмущениях — ПИД-регуляторы. Необходимо отметить, что правильный выбор типа регулятора является очень важной и в то же время достаточно сложной задачей. При настройке регулятора преследуются две цели: обеспечение устойчивой работы САР, под которой понимается способность системы возвращаться к равновесному состоянию после получения возмущений, а также получение требуемого техническими условиями качества регулирования. Параметрами настройки регуляторов являются коэффициенты усиления и, в зависимости от закона регулирования, различные постоянные времени.
Для сложных систем автоматического регулирования до настройки в натурных условиях часто выполняют исследования и настройку модели системы, которая набирается на моделирующих электронных установках.
Вопросы для самоконтроля:
1. Какие системы называются системами автоматического регулирования (САР)?
2. Назвать элементы систем автоматического регулирования.
Ещё посмотрите лекцию "1 Содержание" по этой теме.
3. Назначение потенциометрического и индуктивного датчиков.
4. Принцип действия пьезоэлектрического датчика и сельсина.
5. Назначение и устройство магнитных усилителей.
6. Объект и статический регулятор (П-регулятор). Динамика САР.
7. Объект и изодромный регулятор (ПИ-регулятор).
Литература [4, 5, 6].



















