
Основные методы измерения
Глава 2
ОСНОВНЫЕ МЕТОДЫ ИЗМЕРЕНИЯ И ИЗМЕРИТЕЛЬНЫЕ СХЕМЫ
§ 2.1. Электрические измерения неэлектрических величин
В системах автоматики сигналы управления зависят от различных неэлектрических и электрических величии, характеризующих данный производственный процесс. Информация об этих величинах должна быть получена от датчика и сформирована в виде некоторого сигнала. Наиболее удобно использовать электрический сигнал. По сравнению с другими сигналами (например, механическими, пневматическими, световыми, звуковыми) электрический сигнал обладает целым комплексом преимуществ: возможностью передачи на большие расстояния, простотой преобразования и усиления, возможностью ввода в ЭВМ. Поэтому электрические методы измерения неэлектрических величин получили широкое распространение. Они должны обеспечивать высокую точность преобразования неэлектрической величины в электрический сигнал и быстро реагировать на ее изменение.
Информация о контролируемой неэлектрической величине получается с помощью датчика. Следует отметить, что многие неэлектрические величины удобно предварительно преобразовывать в механическое перемещение, а затем уже с помощью датчика перемещения получить электрический сигнал. Например, в перемещение преобразуются такие неэлектрические величины, как давление (с помощью упругой мембраны), температура (с помощью биметаллической пластины), уровень жидкости (с помощью поплавка), усилие (с помощью пружины). Практически большинство неэлектрических величин сравнительно несложно преобразовать в перемещение. Поэтому в автоматике широкое распространение получили датчики перемещения. Если можно сразу превратить неэлектрическую величину в электрический сигнал, то используются датчики непосредственного преобразования (например, термосопротивления и термопары).
Итак, от датчика получен электрический сигнал, несущий информацию о неэлектрической величине. Этот сигнал представляет собой изменение активного сопротивления, или индуктивности, или напряжения, или тока, или какого-либо другого электрического параметра. Чтобы измерить этот параметр, нужен соответствующий электроизмерительный прибор. А для согласования сигнала датчика с электроизмерительным прибором необходима измерительная схема. Таким образом, схема электрического измерения неэлектрической величины может быть представлена на рис. 2.1. Каждый элемент схемы обладает чувствительностью S и сопротивлением Z. Все они могут питаться от источника электроэнергии (на рис. 2.1 источник питания не показан). Датчик преобразует входную неэлектрическую величину х в электрический параметр у (сопротивление, напряжение или др.). Чувствительность датчика Измерительная схема преобразует изменение одного электрического параметра у в другой электрический параметр г. Чувствительность измерительной схемы
Измерительная схема преобразует изменение одного электрического параметра у в другой электрический параметр г. Чувствительность измерительной схемы Электроизмерительный прибор дает показания а (например, в ви-
Электроизмерительный прибор дает показания а (например, в ви-

Рис. 2.1. Структурная схема электрического измерения неэлектрической величины
де отклонения стрелки на шкале), пропорциональные параметру г. Чувствительность прибора Чувствительность, обеспечиваемая при электрическом методе измерения неэлектрической величины х,
Чувствительность, обеспечиваемая при электрическом методе измерения неэлектрической величины х,
Рекомендуемые материалы

Чувствительность прибора будем полагать величиной заданной и неизменной. А вот чувствительность измерительной схемы можно существенно изменять выбором как самой схемы, так и ее элементов. Различают два режима работы измерительной схемы.
1. Внутреннее сопротивление прибора  значительно больше выходного сопротивления измерительной схемы
значительно больше выходного сопротивления измерительной схемы 
В этом случае показания прибора зависят от напряжения на выходе схемы и поэтому для такого режима определяют чувствительность по напряжению (полагая ):
):
 (2.1)
(2.1)
2. Внутреннее сопротивление прибора соизмеримо с выходным
сопротивлением измерительной схемы. Прибор реагирует на изменение силы тока  Для такого режима определяют чувствительность по току:
Для такого режима определяют чувствительность по току:
 (2.2)
(2.2)
Очень часто в качестве измерительного прибора используется миллиамперметр. В дальнейшем будем рассматривать именно чувствительность по току.
Существующие методы электрических измерений можно в основном разделить на два класса: непосредственной оценки и сравнения. При непосредственной оценке измерительная схема выполняет лишь функции преобразования выходного сигнала датчика, например, усиливает его или согласует выходное сопротивление датчика с входным сопротивлением прибора. Этот метод прост, но применяется сравнительно редко, так как ему свойственны значительные погрешности (особенно при изменении напряжения питания датчика). Метод сравнения обеспечивает более высокие точность и чувствительность. При этом используются мостовые, дифференциальные и компенсационные схемы измерения.
§2.2. Мостовая измерительная схема постоянного тока
Принципиальная схема одинарного моста (рис. 2.2) состоит из четырех резисторов с активными сопротивлениями
 ,
,  и
и  , которые соединены в замкнутый четырехугольник АБВГ. Входящие в схему резисторы
, которые соединены в замкнутый четырехугольник АБВГ. Входящие в схему резисторы называют плечами
называют плечами
или ветвями моста. Плечи можно обозначать и буквами, например плечо АБ. В четырехугольнике АБВГ можно выделить две диагонали: АВ и БГ. В диагональ БГ моста включен измерительный прибор, имеющий активное сопротивление  В диагональ
В диагональ
АБ включен источник питания с ЭДС Е и внутренним сопротивлением Re-
Можно подобрать сопротивления плеч моста так, чтобы потенциалы точек Б и Г, между которыми включен измерительный прибор, были одинаковы. В этом случае ток в цепи прибора  отсутствует (
отсутствует ( ).
).
|
|
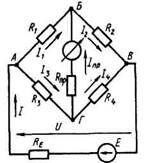
| Рис. 2.2. Мостовая измерительная схема |
Процесс подбора таких сопротивлении, обеспечивающих , называется уравновешиванием или балансировкой моста. Условие равновесия моста может быть получено на основании законов Кирхгофа, записанных для токов в плечах моста с учетом принятых на рис. 2.2 направлений токов;
, называется уравновешиванием или балансировкой моста. Условие равновесия моста может быть получено на основании законов Кирхгофа, записанных для токов в плечах моста с учетом принятых на рис. 2.2 направлений токов;

откуда
|
|

|
|

Поделив (2.3) на (2.4), получим
 (2.5)
(2.5)
Так как в уравновешенном мосте ток в цепи прибора  , то
, то 
 и равенство (2.5) имеет вид
и равенство (2.5) имеет вид 
или
 (2.6)
(2.6)
т. е. условие равновесия моста можно сформулировать так: произведения сопротивлений противолежащих плеч должны быть равны.
С помощью мостовой схемы можно измерить неизвестное сопротивление  включив его в одно из плеч моста, например в плечо ВГ вместо резистора
включив его в одно из плеч моста, например в плечо ВГ вместо резистора . При трех известных сопротивлениях
. При трех известных сопротивлениях  ,
,  ,
,  неизвестное сопротивление
неизвестное сопротивление  . Уравновешивание моста может быть достигнуто изменением либо одного сопротивления (
. Уравновешивание моста может быть достигнуто изменением либо одного сопротивления ( ), либо отношения двух сопротивлений
), либо отношения двух сопротивлений  В уравновешенных мостах измерительный прибор должен быть очень чувствительным, он должен реагировать на малые токи. Именно по показаниям этого прибора и фиксируется равновесие моста. Поэтому в уравновешенных мостах в качестве измерительного прибора используется обычно гальванометр.
В уравновешенных мостах измерительный прибор должен быть очень чувствительным, он должен реагировать на малые токи. Именно по показаниям этого прибора и фиксируется равновесие моста. Поэтому в уравновешенных мостах в качестве измерительного прибора используется обычно гальванометр.
Кроме уравновешенных существуют так называемые неуравновешенные (или небалансные) мосты, в которых  и измеряемое сопротивление Rx определяется именно по отклонению стрелки прибора, т. е. по величине
и измеряемое сопротивление Rx определяется именно по отклонению стрелки прибора, т. е. по величине  , поскольку
, поскольку 
В качестве измерительного прибора в неуравновешенных мостах используются амперметры (так как токи невелики, то обычно милли- или микроамперметры). Уравновешенные мосты требуют ручной или автоматической балансировки, в то время как неуравновешенные мосты не требуют регулировки при каждом измерении. Поэтому неуравновешенные мосты проще, их чаще используют для электрических измерений неэлектрических величин.
На основании законов Кирхгофа могут быть получены выражения для тока в диагонали моста, содержащей измерительный прибор, через напряжение питания 0:
 (2.7)
(2.7)
через ток питания I:
 (2.8)
(2.8)
где
 (2.9)
(2.9)
 (2.10)
(2.10)
Кстати, из (2.7) или (2.8), приравнивая  нулю, можно вывести уже полученное нами условие равновесия моста (2.6).
нулю, можно вывести уже полученное нами условие равновесия моста (2.6).
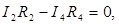
Сложное соединение сопротивлений  ,
,  в мостовой схеме можно преобразовать в эквивалентное сопротивление
в мостовой схеме можно преобразовать в эквивалентное сопротивление — входное сопротивление моста по диагонали питания АВ. Эквивалентная схема моста показана на рис. 2.3. В зависимости от соотношения
— входное сопротивление моста по диагонали питания АВ. Эквивалентная схема моста показана на рис. 2.3. В зависимости от соотношения и
и различают низкоомные и высокоомные мостовые измерительные схемы.
различают низкоомные и высокоомные мостовые измерительные схемы.
Если , то мост называется низкоомным. В таких мостах изменение cопротивления плеч почти не влияет на ток питания
, то мост называется низкоомным. В таких мостах изменение cопротивления плеч почти не влияет на ток питания , т. е. можно считать, что
, т. е. можно считать, что const. При расчете низкоомных мостов обычно используют уравнение (2.8).
const. При расчете низкоомных мостов обычно используют уравнение (2.8).
|
|
Рис 2.3 Эквивалентная схема моста
Если , то мост называется высокоомным. В этом случае постоянной величиной можно считать напряжение на зажимах моста
, то мост называется высокоомным. В этом случае постоянной величиной можно считать напряжение на зажимах моста
 . При расчете высокоомных мостов обычно используют уравнение (2.7).
. При расчете высокоомных мостов обычно используют уравнение (2.7).
Разделив (2.7) на (2.8), получим выражение для входного сопротивления моста
 (2.11)
(2.11)
§ 2.3. Чувствительность мостовой схемы
Чувствительность уравновешенного моста определяется как отношение приращения тока в измерительной диагонали  к вызвавшему его изменению сопротивления одного из плеч моста (например,
к вызвавшему его изменению сопротивления одного из плеч моста (например, на рис. 2.2):
на рис. 2.2):  . В уравновешенном мосте
. В уравновешенном мосте  После изменения
После изменения  на
на  ток прибора
ток прибора  определяется по (2.7) или (2.8):
определяется по (2.7) или (2.8):
|
|

Преобразуем числитель этого выражения, учитывая условие равновесия

Следовательно,  , и чувствительность уравновешенного моста по току
, и чувствительность уравновешенного моста по току
 (2.12)
(2.12)
В некоторых случаях (например, в мостах с автоматическим уравновешиванием) входным сигналом мостовой схемы служит напряжение в измерительной диагонали БГ. Тогда следует определять чувствительность по напряжению: Оценим влияние сопротивлений плеч моста на чувствительность мостовой уравновешенной схемы. Для этого удобно выразить сопротивления всех плеч моста относительно измеряемого сопротивления R4.
Положим ;
;  ;
;  . Так как в уравновешенном мосту
. Так как в уравновешенном мосту  , то
, то  . Подставим значения сопротивлении в (2.12).
. Подставим значения сопротивлении в (2.12).
 1. Для высокоомного моста (полагая
1. Для высокоомного моста (полагая )
)

Анализ уравнения (2.15) показывает, что чувствительность возрастает с увеличением напряжения питания и уменьшением сопротивлений плеч моста. Эти выводы достаточно очевидны. При этом следует иметь в виду, что с уменьшением сопротивлений мост уже не будет высокоомным и к нему неприменимо уравнение (2.15). Менее очевидно, но представляет большой интерес влияние коэффициентов я, т, q. Рассмотрим функцию (2.16). При уменьшении я чувствительность схемы увеличивается. При неизменных коэффициентах п к q чувствительность моста максимальна при

Уравнение (2.17) можно получить продифференцировав  по т и приравняв
по т и приравняв нулю.
нулю.
На рис. 2.4, а показаны номограммы для случая , с помощью которых можно определить т и я, т. е. сопротивления мостовой схемы. По виду кривых можно судить о том, что при известном и достаточно большом диапазоне изменения значений
, с помощью которых можно определить т и я, т. е. сопротивления мостовой схемы. По виду кривых можно судить о том, что при известном и достаточно большом диапазоне изменения значений  и
и  чувствительность мостовой схемы изменяется незначительно.
чувствительность мостовой схемы изменяется незначительно.
Чувствительность низкоомного моста (при )
)
|
|
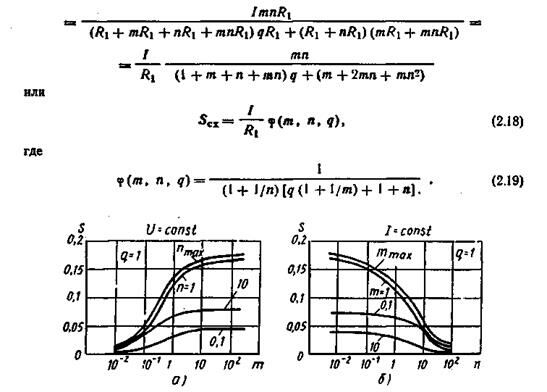
Рис. 2.4. Номограммы к расчету чувствительности мостовой схемы
Анализ уравнения (2.19) показывает, что при увеличении т. чувствительность схемы возрастает. При неизменных значениях  и
и  чувствительность моста максимальна при
чувствительность моста максимальна при
 (2.20)
(2.20)
Уравнение (2.20) можно получить продифференцировав  по я
по я
и приравняв  нулю. Номограммы для случая
нулю. Номограммы для случая  показаны на рис. 2.4, б.
показаны на рис. 2.4, б.
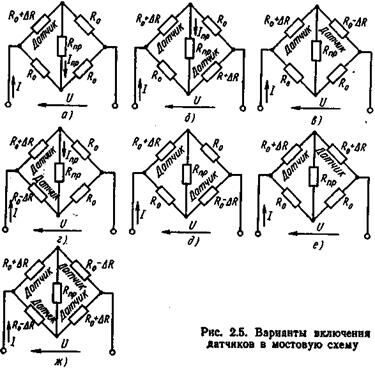
Рассмотрим теперь чувствительность неуравновешенного моста. Датчики с изменяющимся сопротивлением  можно включить в разные плечи моста. Рассмотрим различные варианты подключения датчиков (рис. 2.5).
можно включить в разные плечи моста. Рассмотрим различные варианты подключения датчиков (рис. 2.5).
1. Чаще всего используется простая (рис. 2.5, а) схема равноплечего ( ) моста с одним датчиком где
) моста с одним датчиком где  —
—  сопротивление датчика, соответствующее начальному значению измеряемой неэлектрической величины.
сопротивление датчика, соответствующее начальному значению измеряемой неэлектрической величины.
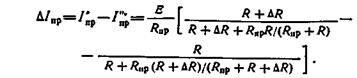
Воспользуемся уравнением (2.8) для определения изменения тока через из
мерительный прибор:


Для малых приращений можно пренебречь в знаменателе слагаемыми
можно пренебречь в знаменателе слагаемыми  и
и по сравнению с другими слагаемыми
по сравнению с другими слагаемыми
Чувствительность схемы
 (2.21)
(2.21)
Примем чувствительность моста с одним датчиком за исходную и выразим чувствительность всех других вариантов мостовых схем через
и выразим чувствительность всех других вариантов мостовых схем через
2. На схеме рис. 2.5, б одинаковые датчики с изменяющимся сопротивлением включены в противоположные плечи моста. В этом случае приращение тока в измерительном приборе
включены в противоположные плечи моста. В этом случае приращение тока в измерительном приборе

т. е. чувствительность увеличивается вдвое. Такое же увеличение чувствительности получается в схеме рис. 2.5, в, где второй датчик включен не в противоположное, а в соседнее плечо и его сопротивление не увеличивается, а уменьшается:
увеличивается вдвое. Такое же увеличение чувствительности получается в схеме рис. 2.5, в, где второй датчик включен не в противоположное, а в соседнее плечо и его сопротивление не увеличивается, а уменьшается: В схемах по рис. 2.5, а—в чувствительность непостоянна, т. е. зависимость
В схемах по рис. 2.5, а—в чувствительность непостоянна, т. е. зависимость нелинейна.
нелинейна.
3. Если датчики с изменяющимися сопротивлениями включить в соседние
плечи моста по схеме рис. 2.5, г ( —в плечо
—в плечо  , а
, а —в плечо
—в плечо  ), то чувствительность его по-прежнему в два раза больше
), то чувствительность его по-прежнему в два раза больше  , а зависимость
, а зависимость близка к линейной в довольно широких пределах.
близка к линейной в довольно широких пределах.
Недостаток схемы в том, что если датчиками являются сопротивления с подвижным контактом, то питание к схеме подводится именно через этот подвижный контакт, что снижает надежность схемы.
4. При включении датчиков по схемам, показанным на рис. 2.5, д, е, изменение сопротивления одновременно в обоих плечах не приводит к изменению тока в измерительном приборе, т. е. Такое подключение датчиков является ошибочным.
Такое подключение датчиков является ошибочным.
5. Если включить четыре одинаковых датчика во все четыре плеча моста так. как показано на рис. 2.5, ж, то изменение тока в измерительном приборе
 При этом обеспечивается максимальная чувствительность
При этом обеспечивается максимальная чувствительность
§ 2.4. Мостовая схема переменного тока
В плечи мостовой схемы переменного тока (рис. 2.6) включены полные сопротивления, состоящие из активной и реактивной составляющих. Будем пользоваться комплексной формой записи полных сопротивлений В диагональ АВ моста
В диагональ АВ моста
 включен источник переменного синусоидального напряжения
включен источник переменного синусоидального напряжения , а в диагональ БГ — измерительный прибор переменного тока. Направления токов в плечах моста могут быть выбраны произвольно. Ток измерительной диагонали
, а в диагональ БГ — измерительный прибор переменного тока. Направления токов в плечах моста могут быть выбраны произвольно. Ток измерительной диагонали
 ,
,
| где |
|
|

| Рис. 2.6. Мостовая измерительная схема на переменном токе |
|
|

(2.22)
 — комплексные выражения, аналогичные выражениям в уравнениях (2.9) и (2.10) для моста постоянного тока.
— комплексные выражения, аналогичные выражениям в уравнениях (2.9) и (2.10) для моста постоянного тока.
|
|

Условия равновесия моста переменного тока получим, приравнивая (2.22) нулю:

|
|

где
Напомним, что при показательной форме записи комплексной величины модуль а аргумент
а аргумент
В соответствии с условием равновесия моста подставим в (2.25) значения полных сопротивлений

Представим левую и правую части в виде действительной и мнимой составляющих:

Две комплексные величины равны только в том случае, если равны порознь их действительные и мнимые части:
 (2.26) (2.27)
(2.26) (2.27)

 Таким образом, получаем два независимых условия равновесия, которые должны выполняться одновременно. Если в мостах постоянного тока имеется одно условие равновесия и уравновешивание достигается регулировкой одного сопротивления, то в мостах переменного тока для уравновешивания необходима регулировка не менее двух параметров схемы. Трудность уравновешивания моста переменного тока состоит в том, что в процессе обеспечения одного условия (например, равенства произведений модулей сопротивлений в противоположных плечах:
Таким образом, получаем два независимых условия равновесия, которые должны выполняться одновременно. Если в мостах постоянного тока имеется одно условие равновесия и уравновешивание достигается регулировкой одного сопротивления, то в мостах переменного тока для уравновешивания необходима регулировка не менее двух параметров схемы. Трудность уравновешивания моста переменного тока состоит в том, что в процессе обеспечения одного условия (например, равенства произведений модулей сопротивлений в противоположных плечах:  ) нарушается другое соотношение — между фазовыми сдвигами:
) нарушается другое соотношение — между фазовыми сдвигами:
Обычно такие мосты регулируются вручную методом последовательных приближений.
В некоторых частных случаях уравновешивание моста обеспечивается выполнением одного из трех условий.
1. Если  , т. е. плечи моста имеют только реактивные сопротивления, то условие равновесия
, т. е. плечи моста имеют только реактивные сопротивления, то условие равновесия
2. Если  , т. е. плечи моста имеют только активные сопротивления, условие равновесия
, т. е. плечи моста имеют только активные сопротивления, условие равновесия
3.  Если два соседних плеча имеют только реактивные сопротивления, а два других — только активные (любая пара соседних плеч), например
Если два соседних плеча имеют только реактивные сопротивления, а два других — только активные (любая пара соседних плеч), например  , то условие равновесия:
, то условие равновесия:
Следует иметь в виду, что катушки индуктивности всегда кроме индуктивного сопротивления имеют активное сопротивление, которое в некоторых случаях настолько мало, что им можно пренебречь.
Расчет чувствительности моста переменного тока можно провести в соответствии с (2.12), учитывая, что вместо  следует подставить комплексное сопротивление
следует подставить комплексное сопротивление . Чувствительность моста по току
. Чувствительность моста по току
 (2.28)
(2.28)
чувствительность по напряжению
 (2.29)
(2.29)
Уравновешивание моста переменного тока может осуществляться автоматически при соотношениях сопротивлений плеч, рассмотренных для частных случаев 1—3.
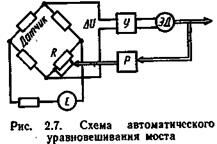
Автоматическое уравновешивание мостов переменного и постоянного тока выполняется по
схеме, показанной на рис. 2.7. Напряжение разбаланса  снимается с измерительной диагонали моста и подается на исполнительный микроэлектродвигатель (ЭД) через усилитель (У). Двигатель через редуктор (Р) перемещает движок переменного резистора R до тех пор, пока не будет обеспечено условие равновесия и напряжение разбаланса
снимается с измерительной диагонали моста и подается на исполнительный микроэлектродвигатель (ЭД) через усилитель (У). Двигатель через редуктор (Р) перемещает движок переменного резистора R до тех пор, пока не будет обеспечено условие равновесия и напряжение разбаланса  не станет равным нулю. Одновременно будет перемещаться и стрелка по шкале, которая может быть проградуирована в единицах сопротивления датчика или в соответствующих этому сопротивлению единицах измеряемой неэлектрической величины.
не станет равным нулю. Одновременно будет перемещаться и стрелка по шкале, которая может быть проградуирована в единицах сопротивления датчика или в соответствующих этому сопротивлению единицах измеряемой неэлектрической величины.
§ 2.5. Дифференциальные измерительные схемы
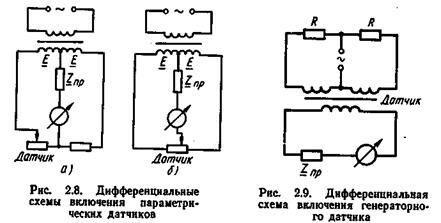
Дифференциальная схема состоит из двух смежных контуров с источником питания, а измерительный прибор включен в общую ветвь контуров и реагирует на,разность контурных токов. В дифференциальной схеме могут быть использованы как параметрические датчики (с изменяющимися сопротивлениями), так и генераторные (с изменяющейся ЭДС). Дифференциальные схемы включения параметрических датчиков показаны на рис. 2.8 (а — датчик включен в один контур; б — датчик включен в оба контура). ЭДС, питающие оба контура, одинаковы. Дифференциальная схема включения генераторного датчика показана на рис. 2.9. В этой схеме датчиком является так называемый дифференциальный трансформатор (подробно рассмотрен в § 6.4). При изменении магнитной связи между обмотками трансформатора ЭДС левого контура, например, возрастает, а правого — уменьшается. Изменение магнитной связи обусловлено контролируемой неэлектрической величиной. Например, оно может быть вызвано перемещением ферромагнитного сердечника в дифференциальном трансформаторе.
Проведем сравнение дифференциальной и мостовой измерительных схем по чувствительности. В обеих схемах (рис. 2.10, а, 6) будем использовать одинаковые датчики с изменяющимся активным сопротивлением  и одинаковое питание — от вторичной обмотки трансформатора с ЭДС, равной
и одинаковое питание — от вторичной обмотки трансформатора с ЭДС, равной (при дифференциальной схеме имеется вывод от средней точки).
(при дифференциальной схеме имеется вывод от средней точки).
Для расчета токов в дифференциальной схеме используем метод наложения: сначала определим токи от одной ЭДС, затем — от другой (рис. 2.11).
|
|

Ток через прибор для расчетной схемы (рис. 2.11, а)
Ток через прибор для расчетной схемы (рис. 2.11, б)

Результирующий ток через прибор
 Определение чувствительности дифференциальной схемы в общем виде приводит к довольно сложному уравнению, поэтому рассмотрим числовой пример. Пусть E=10 В; R= 10 Ом;
Определение чувствительности дифференциальной схемы в общем виде приводит к довольно сложному уравнению, поэтому рассмотрим числовой пример. Пусть E=10 В; R= 10 Ом;  =0,1 Ом; Rпр=0,5 Ом. Тогда
=0,1 Ом; Rпр=0,5 Ом. Тогда
 |
|
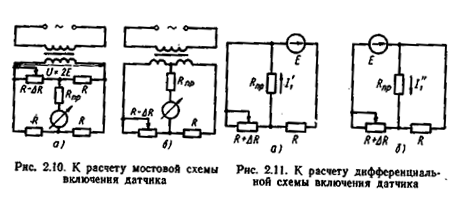
Таким образом, при одинаковых напряжениях питания, сопротивлениях датчика и измерительного прибора, приращениях сопротивления датчика дифференциальная схема дает большее приращение тока в измерительной цепи. Следовательно, дифференциальная измерительная схема имеет большую чувствительность, чем мостовая схема.
Ток в измерительной цепи мостовых и дифференциальных схем зависит от напряжения питания. Колебания напряжения питания . приводят к появлению погрешности, так как ток через прибор и отклонение его стрелки изменяются даже при неизменном сопротивлении датчика.
 Для уменьшения влияния напряжения питания на показания прибора используют так называемые логометрические схемы измерения. Логометром называется магнитоэлектрический прибор, противодействующий момент в котором создается не механически (пружиной), а электрически. На рис. 2.12 приведена принципиальная схема логометра для измерения сопротивления датчика Яд, В магнитном поле постоянного магнита с полюсными наконечниками NS помещен стальной цилиндрический сердечник. В зазоре между сердечником и полюсными наконечниками помещены две обмотки wi и а>2, выполненные в виде рамок. При прохождении тока по рамке создается вращающий момент и рамка поворачивается. Зазор сделан неравномерным, чтобы вращающий момент изменялся в зависимости от угла поворота. Обмотки o»i и а>2 намотаны так, чтобы моменты рамок были направлены навстречу друг другу. Рамки жестко соединены между собой под определенным углом. Вместе они могут поворачиваться одновременно с закрепленной на рамках стрелкой прибора. Токи к рамкам подводятся с помощью спиральных пружин, которые создают малый противодействующий момент, возвращающий рамки и стрелку в исходное положение, когда тока в приборе нет.
Для уменьшения влияния напряжения питания на показания прибора используют так называемые логометрические схемы измерения. Логометром называется магнитоэлектрический прибор, противодействующий момент в котором создается не механически (пружиной), а электрически. На рис. 2.12 приведена принципиальная схема логометра для измерения сопротивления датчика Яд, В магнитном поле постоянного магнита с полюсными наконечниками NS помещен стальной цилиндрический сердечник. В зазоре между сердечником и полюсными наконечниками помещены две обмотки wi и а>2, выполненные в виде рамок. При прохождении тока по рамке создается вращающий момент и рамка поворачивается. Зазор сделан неравномерным, чтобы вращающий момент изменялся в зависимости от угла поворота. Обмотки o»i и а>2 намотаны так, чтобы моменты рамок были направлены навстречу друг другу. Рамки жестко соединены между собой под определенным углом. Вместе они могут поворачиваться одновременно с закрепленной на рамках стрелкой прибора. Токи к рамкам подводятся с помощью спиральных пружин, которые создают малый противодействующий момент, возвращающий рамки и стрелку в исходное положение, когда тока в приборе нет.
Датчик включен последовательно с обмоткой
включен последовательно с обмоткой , постоянный резистор R — последовательно с обмоткой
, постоянный резистор R — последовательно с обмоткой . Если сопротивления
. Если сопротивления и R равны, то токи в рамках также равны (
и R равны, то токи в рамках также равны ( ) и подвижная система (обе рамки со стрелкой) займет положение, симметричное относительно оси полюсов NS. Если же сопротивление датчика изменится (например, увеличится), то ток /i уменьшится и уменьшится момент
) и подвижная система (обе рамки со стрелкой) займет положение, симметричное относительно оси полюсов NS. Если же сопротивление датчика изменится (например, увеличится), то ток /i уменьшится и уменьшится момент  , создаваемый этим током в рамке i0j. Так как ток
, создаваемый этим током в рамке i0j. Так как ток и соответствующий ему момент
и соответствующий ему момент остался неизменным, то результирующий момент повернет подвижную систему на некоторый угол. При этом рамка
остался неизменным, то результирующий момент повернет подвижную систему на некоторый угол. При этом рамка с большим током входит в расширяющийся зазор с меньшей индукцией, а рамка wi с меньшим током, наоборот, входит в сужающийся зазор с большей индукцией. Момент
с большим током входит в расширяющийся зазор с меньшей индукцией, а рамка wi с меньшим током, наоборот, входит в сужающийся зазор с большей индукцией. Момент будет уменьшаться, а
будет уменьшаться, а —увеличиваться. При определенном угле поворота моменты сравниваются и подвижная система займет новое равновесное положение. Если же изменится напряжение питания цепи U, то в рамках
—увеличиваться. При определенном угле поворота моменты сравниваются и подвижная система займет новое равновесное положение. Если же изменится напряжение питания цепи U, то в рамках  и
и изменятся токи, притом одновременно и в одинаковой степени (так как рамки подключены к источнику питания параллельно). Соотношение токов и моментов останется неизменным и положение подвижной системы не изменится. Как видно, на положение стрелки влияют не сами токи, а их отношение, которое определяется сопротивлением датчика и не зависит от напряжения питания.
изменятся токи, притом одновременно и в одинаковой степени (так как рамки подключены к источнику питания параллельно). Соотношение токов и моментов останется неизменным и положение подвижной системы не изменится. Как видно, на положение стрелки влияют не сами токи, а их отношение, которое определяется сопротивлением датчика и не зависит от напряжения питания.
§ 2.6. Компенсационные измерительные схемы
Компенсационные схемы используют для измерения неэлектрических величин, которые преобразуются датчиками в ЭДС или напряжение. Сигнал датчика сравнивается с компенсирующим напряжением, вырабатываемым потенциометром. Подбор компенсирующего напряжения выполняется вручную или автоматически.
Приборы с автоматической компенсацией называют также автоматическими потенциометрами.
 Рассмотрим простейшую компенсационную схему (рис. 2.13) с ручным уравновешиванием. Измеряемая ЭДС
Рассмотрим простейшую компенсационную схему (рис. 2.13) с ручным уравновешиванием. Измеряемая ЭДС или напряжение
или напряжение уравновешиваются равным и противоположным по знаку напряжением
уравновешиваются равным и противоположным по знаку напряжением , снимаемым с переменного проволочного резистора
, снимаемым с переменного проволочного резистора . Этот резистор имеет два неподвижных вывода и один подвижный, выполненный в виде щетки, скользящей по проволоке. Все сопротивление резистора R включено в цепь источника питания с ЭДС Е. Переменное сопротивление RK пропорционально перемещению х движка (щетки):
. Этот резистор имеет два неподвижных вывода и один подвижный, выполненный в виде щетки, скользящей по проволоке. Все сопротивление резистора R включено в цепь источника питания с ЭДС Е. Переменное сопротивление RK пропорционально перемещению х движка (щетки):  , где L — общая длина проволочной намотки между неподвижными выводами. Соответственно и компенсирующее напряжение UK будет пропорционально перемещению движка х
, где L — общая длина проволочной намотки между неподвижными выводами. Соответственно и компенсирующее напряжение UK будет пропорционально перемещению движка х  , где / — ток, проходящий через резистор R под действием ЭДС Е.
, где / — ток, проходящий через резистор R под действием ЭДС Е.
Движок необходимо перемещать до тех пор, пока компенсирующее напряжение не сравняется с измеряемым напряжением
не сравняется с измеряемым напряжением =
= , Для определения положения точной компенсации используется чувствительный прибор (гальванометр или микроамперметр). Ток через прибор
, Для определения положения точной компенсации используется чувствительный прибор (гальванометр или микроамперметр). Ток через прибор

где —сопротивление датчика;
—сопротивление датчика; —сопротивление прибора.
—сопротивление прибора.
Если компенсация произошла, то ток через прибор равен нулю: Значит, прибор в данном случае нужен не для измерения тока, а для определения его нулевого значения. Поэтому такой прибор называют нуль-индикатором (НИ). О значении измеряемого напряжения можно судить по перемещению движка, т. е. движок можно соединить со стрелкой, а вдоль резистора R расположить шкалу, проградуировав ее в единицах напряжения или сразу в единицах той неэлектрической величины, которая преобразуется датчиком в ЭДС
Значит, прибор в данном случае нужен не для измерения тока, а для определения его нулевого значения. Поэтому такой прибор называют нуль-индикатором (НИ). О значении измеряемого напряжения можно судить по перемещению движка, т. е. движок можно соединить со стрелкой, а вдоль резистора R расположить шкалу, проградуировав ее в единицах напряжения или сразу в единицах той неэлектрической величины, которая преобразуется датчиком в ЭДС или в напряжение
или в напряжение
Отметим также, что при компенсационном методе измерения  Действительно,
Действительно, , но в момент компенсации
, но в момент компенсации
Точность измерения при компенсационном методе зависит от стабильности поддержания тока / в цепи питания резистора R. Ведь именно от силы этого тока зависит значение компенсирующего напряжения Если ЭДС источника питания Е уменьшилась (из-за разряда аккумулятора или батарейки), то уменьшится и ток L Для компенсации придется на большее расстояние х переместить движок резистора
Если ЭДС источника питания Е уменьшилась (из-за разряда аккумулятора или батарейки), то уменьшится и ток L Для компенсации придется на большее расстояние х переместить движок резистора , и стрелка укажет на иное, ошибочное значение измеряемой величины. Для поддержания стабильного тока питания / можно использовать регулировочный резистор
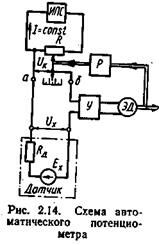
, и стрелка укажет на иное, ошибочное значение измеряемой величины. Для поддержания стабильного тока питания / можно использовать регулировочный резистор  и миллиамперметр или применить источник стабилизированного напряжения, как в автоматическом потенциометре (рис. 2.14).
и миллиамперметр или применить источник стабилизированного напряжения, как в автоматическом потенциометре (рис. 2.14).
Чувствительность компенсационной схемы можно определить как отношение приращения тока через прибор к вызывающему его изменению измеряемого напряжения:
 (2.31)
(2.31)
|
|
Если достигнуто состояние компенсации, то измеряемое напряжение  уравновешено компенсирующим напряжением
уравновешено компенсирующим напряжением
 и ток через прибор равен нулю.
и ток через прибор равен нулю. Пусть измеряемое напряжение изменилось на
Пусть измеряемое напряжение изменилось на а компенсирующее напряжение не изменилось (движок резистора R неподвижен). В этом случае разность между измеряемым и компенсирующим напряжениями равна
а компенсирующее напряжение не изменилось (движок резистора R неподвижен). В этом случае разность между измеряемым и компенсирующим напряжениями равна  . Под действием этого напряжения через прибор пройдет ток
. Под действием этого напряжения через прибор пройдет ток
 (2.32)
(2.32)
где —внутреннее сопротивление электрической цепи питания, замеренное на зажимах а—б при отключенном датчике;
—внутреннее сопротивление электрической цепи питания, замеренное на зажимах а—б при отключенном датчике;  — сопротивление прибора (нуль-индикатора);
— сопротивление прибора (нуль-индикатора);  —сопротивление датчика.
—сопротивление датчика.
Сопротивление можно представить как параллельное соединение части сопротивления компенсирующего резистора
можно представить как параллельное соединение части сопротивления компенсирующего резистора

с сопротивлением, состоящим из оставшейся части компенсирующего резистора  и регулировочного резистора
и регулировочного резистора
| Бесплатная лекция: "11 - Электронный каталог (ЭК)" также доступна.
|

Подставив (2.32) и (2.33) в (2.31), получим выражение для чувствительности компенсационной схемы:

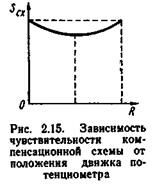
Анализ формулы (2.34) показывает, что чувствительность схемы зависит от , а так как
, а так как то чувствительность зависит от положения движка х. Чувствительность непостоянна в разных точках шкалы. На рис. 2.15 показана зависимость чувствительности от положения движка компенсирующего резистора. В начальном положении движка
то чувствительность зависит от положения движка х. Чувствительность непостоянна в разных точках шкалы. На рис. 2.15 показана зависимость чувствительности от положения движка компенсирующего резистора. В начальном положении движка чувствительность максимальна:
чувствительность максимальна: 
 В среднем положении движка чувствительность минимальна, что необходимо учитывать при точных измерениях ЭДС.
В среднем положении движка чувствительность минимальна, что необходимо учитывать при точных измерениях ЭДС.
Компенсационный метод измерения применяется в цепях как постоянного, так и переменного токов. Однако потенциометры переменного тока дают меньшую точность измерения и сложнее, поскольку необходимо компенсировать падение напряжения не только по абсолютной величине, но и по фазе. Это требует одновременного регулирования не менее двух параметров для обеспечения полной компенсации. На практике стремятся упростить мост переменного тока, выполняя одну пару плеч моста чисто активными, а другую пару — из однотипных элементов.



















