


Применение микропроцессоров в приводах
Лекция 11.
Применение микропроцессоров в приводах мехатронных систем. Примеры МП приводов современных систем.
Пример МК-системы на основе ОМЭВМ семейства МК51.
В данном разделе рассматривается пример построения МК-системы на основе ОМЭВМ МК51, который может быть использован для приобретения навыков программирования и отладки программ для МК51, а также рассматриваться в качестве макета реальной системы управления для отладки ее прикладного программного обеспечивания совместно с объектом управления в реальном масштабе времени.
Проектируемый отладочный модуль должен содержать следующие средства:
- постоянную память с программой Монитор, обеспечивающей управление всей системой и прежде всего взаимодействие с оператором;
- оперативную память для занесения программ, данных и создания буферов Монитора;
- простейшую клавиатуру для загрузки кодов и взаимодействия с оператором: 16 цифровых клавиш (цифры от 0 до F), 8 управляющих клавиш, в том числе и клавиша "сброс" - системного сброса;
- простой дисплей, обычно однострочный (на основе семисегментных индикаторов), который используется для визуального контроля вводимой информации и отображения данных;
- расширитель ввода-вывода на основе ППА КР580ВВ55.
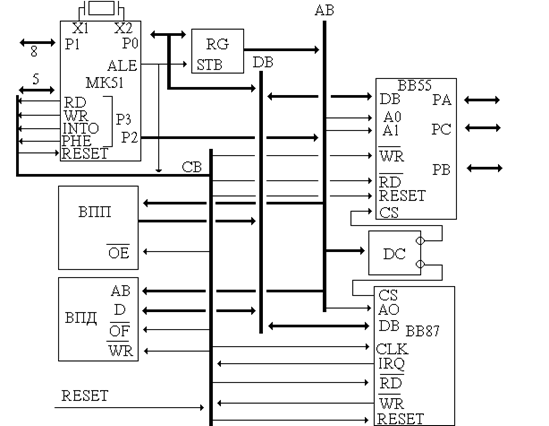
Кроме того, отладочный модуль может иметь собственный источник электропитания и (в некоторых случаях) дополнительное место на печатной плате ("слот”) для монтажа пользовательских средств связи с объектом управления. Функциональная схема отладочного модуля, удовлетворяющего поставленным требованиям, приведена на рис.15. Как видно из приведенной схемы, память МКС имеет две физически- разделенные области для хранения данных и программ: ВПД и ВПП.
Рекомендуемые материалы
Рис.15. Функциональная схема отладочного модуля
Обращение к ним стробируется сигналами RD, WR и РSЕN, соответственно. Программа Монитор расположена в ВПП. Адресное пространство ВПД включает в себя следующие области: буферную область Монитора; память данных; область, отведенную для подключения интерфейсных БИС (ППА, ККД).
Контроллер клавиатуры - дисплея (ККД) закрывает адресные пространства ВПД размером в 4 ячейки. Выбор кристалла ККД осуществляется дешифратором ДС, при установке соответствующих адресов (указанных 4-х ячеек).
Обмен данными МК с ККД осуществляется через порт Р0. Для синхронизации работы ККД используется сигнал с выхода АLЕ. Выход сигнала прерывания из ККД (IRQ) соединен со входом запроса прерываний МК. Это позволяет достаточно просто обнаруживать факт нажатия клавиш, а также выполнять переход из программы пользователя в Монитор по прерыванию от клавиатуры.
Для управления внешним объектом от МК используется порт Р1 и оставшиеся не задействованными 5 линий порта Р3. Для сопряжения МК с объектом, имеющим большое число входов/выходов, можно расширить резидентную систему ввода/вывода, подключив к МК необходимое количество внешних портов. Такое расширение может быть выполнено двумя способами: с использованием стандартного расширителя ввода/вывода (КР580ВР43) или интерфейсных БИС (КР580ВВ55, КР580ВВ51). На приведенной схеме показан вариант расширения ввода/вывода с использованием параллельного периферийного адаптера (ППА) КР580ВВ55. Порты адаптера адресуются как ячейки ВПД, при этом младшие разряды (А0, А1) шины адреса используются для выбора порта, а старшие (А10 ¸ А3) с помощью дешифратора DС формируют сигнал выбора микросхемы ППА.
Ввод/вывод данных стробируется сигналами WR/RD - записи/чтения ВПД. Системный сброс МКС осуществляется нажатием на клавишу "сброс".
Унифицированная структура силовой части статических преобразователей частоты для широкого класса приводов переменного тока.
Современный этап технической революции характеризуется бурным развитием не только управляющей, но и силовой электроники. успехи которой позволяют по новому взглянуть на ряд проблем, которые раньше не решались либо ввиду непомерной стоимости проекта либо сложности его реализации на имеющейся элементной базе.
Известно, что в большинстве промышленно развитых стран около 70-80% всей вырабатываемой электроэнергии используется для преобразования в механическую работу с помощью различных электродвигателей. При этом до последнего времени наиболее массовым типом электропривода был нерегулируемый привод с асинхронными короткозамкнутыми двигателями. Это объясняется простотой двигателя и возможностью его непосредственного подключения к трехфазной сети переменного тока с помощью так называемых пускателей - простейшей коммутационной и защитной аппаратуры.
Применение нерегулируемых электроприводов сопровождается значительными непроизводительными затратами электроэнергии и в условиях резкого подорожания энергоносителей и, соответственно, электроэнергии, экономически невыгодно. Поэтому, доля регулируемых электроприводов, в том числе частотно-регулируемых электроприводов переменного тока постоянно растет. При этом в ряде стран приняты специальные государственные программы ускоренного развития энерго- и ресурсосберегающих технологий на базе экономичного регулируемого электропривода с широкими интерфейсными возможностями, дозволяющими одновременно с экономией электроэнергии решать и задачи комплексной автоматизации производства в целях оптимизации параметров технологических процессов и улучшения качества выпускаемой продукции.
Увеличение стоимости энергоносителей привело к еще одной проблеме - удорожанию цветных металлов и к увеличению стоим ости электрических машин традиционных конструкций. Эта проблема способствовала быстрому прогрессу электрических машин новых типов с малыми затратами меди и алюминия («малообмоточных»): реактивных и индукторных, которые к тому же более технологичны, так как имеют не распределенные, а более простые в изготовлении сосредоточенные обмотки.
В отличие от асинхронных двигателей эти двигатели не могут работать непосредственно от сети переменного тока и требуют питания от инвертора напряжения или тока с регулируемой выходной частотой. Особенно эффективна работа таких машин в режиме автокоммутации, когда переключение фаз выполняется по сигналам установленного на вал двигателя (встроенного) датчика положения. Такой двигатель называется вентильным или бесконтактным двигателем постоянного тока и допускает управление по двум каналам: каналу напряжения на якоре и каналу угла коммутации. По прогнозам специалистов вентильные двигатели в начале следующего века вытеснят с рынка как традиционные коллекторные двигатели постоянного тока, так и асинхронные двигатели.
Большинство современных систем привода переменного тока со статическими преобразователями частоты строится по хорошо известной классической схеме: «Неуправляемый выпрямитель - Звено постоянного тока - Автономный инвертор напряжения с ШИМ-модуляцией - Двигатель» (рис.16). Для трехфазных двигателей (асинхронных, синхронных, вентильных или вентильных индукторных) инвертор напряжения выполняется по стандартной 6-и ключевой схеме. Для двигателей с другим числом фаз, например, для четырехфазных индукторных двигателей инвертор строится на базе полумостовых или мостовых схем.
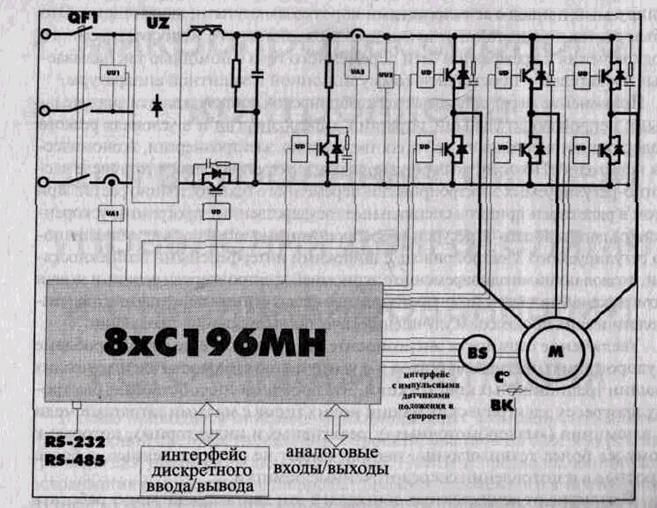
Рис. 16. Типовая структура привода переменного тока
Силовой преобразователь состоит из неуправляемого выпрямителя UZ, подключаемого к однофазной или трехфазной сети переменного тока и автономного инвертора напряжения, работающего, как правило, в режиме синусоидальной широтно-импульсной модуляции. К выходу инвертора подключен двигатель М (асинхронный или вентильный постоянного тока). В последнем случае на вал двигателя дополнительно устанавливается датчик положения BS.
Инвертор может быть построен с использованием биполярных транзисторов с изолированным затвором IGBT. В широком диапазоне токов и напряжений рядом фирм выпускаются как отдельные силовые транзисторы, так и стойки, моду; и и даже интеллектуальные модули, имеющие встроенные драйверы и элементы защиты, а также интерфейсы, допускающие непосредственное подключение микропроцессорных систем управления. Имеются также и другие необходимые для построения привода компоненты: электролитические конденсаторы на высокие напряжения и токи, диодные модули для построения выпрямителей и т.д.
Мощная, встроенная в преобразователь микропроцессорная система управления должна выполнять функции не только прямого цифрового управления инвертором напряжения, но и всеми дополнительными элементами преобразователя, а именно:
• Цепью возбуждения для синхронных и вентильных двигателей с независимым контуром возбуждения (который физически может располагаться как на роторе, так и на статоре).
• Цепью зашиты преобразователя от перенапряжений при рекуперации энергии (путем управляемого «слива» энергии в дополнительный балластный резистор) для приводов с активной нагрузкой на валу или приводов с высокими требованиями по динамике переходных процессов.
• Цепью заряда батареи конденсаторов в контуре постоянного тока при включении преобразователя в работу.
• Цепью питания электромагнитного тормоза (если он необходим).
Кроме того, встроенная система микропроцессорного управления должна напрямую обрабатывать сигналы ряда датчиков обратных связей, среди которых типовыми являются датчики напряжения и тока в цепи постоянного тока, тока возбуждения двигателя, температуры двигателя и (или) преобразователя, а также датчики положения ротора различных типов (на базе чувствительных элементов Холла, оптических импульсных датчиков положения и т.д.), необходимые для выполнения функций автокоммутации в приводах с вентильными двигателями. Датчики положения или скорости, например, импульсные, могут потребоваться также в приводах с асинхронными двигателями целях более точной компенсации скольжения в функции нагрузки для расширения диапазона регулирования. Таким образом, встроенная микропроцессорная система управления должна иметь развитый интерфейс как с источниками аналоговых сигналов, так и с источниками импульсных сигналов.
Отметим, что современная встроенная система управления преобразователем частоты не будет конкурентоспособной без интерфейса с системами более высокого уровня управления (последовательного интерфейса RS-232 или 485), а также интерфейса с пультом оперативного управления, предназначенным для организации интерактивного взаимодействия с оператором для настройки параметров преобразователя, выбора нужного режима работы, наблюдения за координатами привода и технологическими переменными и tj.
Сотни различных фирм, среди них такие известные как ABB, Siemens, Alien Bradley, Dan bss и др., выпускают преобразователи частоты и комплектные электропривода на их основе в диапазоне мощностей от 100 ВА до 100 кВА, работающие с высоким коэффициентом полезного действия до 96% и коэффициентом мощности до 0.9.
Серьезный научный потенциал, накопленный в России в области теории автоматического управления и теории электропривода, теории синхронных, шаговых и вентильных двигателей, вместе с доступностью современных микроэлектронных компонент (как силовых, так и управляющих), позволяет быстро выполнять необходимые разработки и запускать в производство отечественные серии преобразователей, основные технические характеристики которых соответствуют мировому уровню.
Приведем результаты проектирования универсального микропроцессорного контроллера для систем встроенного управления широкой гаммой приводов переменного тока со статическими преобразователями частоты, а также стабилизированными источниками питания.
Универсальный контроллер для встроенных применений
На рис. 17. показана блок-схема системы управления для использования в частотно-регулируемых электроприводах с асинхронными, синхронными, вентильными и шаговыми двигателями, а также в системах вторичного стабилизированного питания. Диапазон применений системы управления широк: от приводов насосов-дозаторов жидких сред до двухпроцессорных систем векторного управления приводами стержней ядерных реакторов.
При проектировании система управления была принята концепция совмещения функций прямого цифрового управления элементами преобразователя частоты и технологическими переменными, значение которых изменяется при регулировании скорости привода. Таким образом, в систему непосредственного управления встроены функции промышленного программируемого контроллера средней производительности, реализующего заданный алгоритм управления технологическим процессом (ПИД-регулятор). Такой подход позволяет отказаться от дополнительных устройств, создавая своеобразные узлы автоматизации, способные самостоятельно управлять как двигателями, так и технологическими переменными (давлением, расходом, подачей и т.д.).
Концепция интеллектуальных распределенных систем управления с каждым годом завоевывает все больше сторонников. Это связано с общей тенденцией переноса все больших вычислительных ресурсов непосредственно к месту, где установлено исполнительное устройство и соответствующий рабочий орган.
В состав системы управления входят следующие изделия.
• Одноплатный универсальный контроллер (в формате Е2).
• Пульт оперативного управления с двухстрочным жидкокристаллическим дисплеем и клавиатуре ft 4х4, выпускаемый как в виде встраиваемого изделия, так и виде автономного изделия, подключаемого к контроллеру плоским кабелем.
• Интерфейсная плата релейного ввода/вывода дискретных сигналов «сухим» контактом (8 входов и 8 выходов).
• Интерфейсная плата ввода/вывода импульсных сигналов, обеспечивающая сопряжение с 2-,3 -, 4-, 6-фазными датчиками положения, а также ввод реперных сигналов идентификации начальной позиции. Для работы контроллера необходим внешний источник питания 5 В (1А). Встроенная схема мониторинга питания обеспечивает постоянный контроль уровня внешнего питания и формирование запроса на прерывание процессора при раннем обнаружении падения напряжения ниже допустимого уровня.
В качестве центрального процессора выбран один из самых современных и высокопроизводительных 16-разрядных микроконтроллеров для управления двигателями Inte 18хС196МН, обеспечивающий функции прямого цифрового управления инверторами напряжения в режиме центрированной синусоидальной ШИМ-модуляции на частотах несущей до 20 кГц с возможностями программного регулирования «мертвого времени» для защиты инвертора от сквозного тока в диапазоне от 0 до 125 мкс.
Все выходы ШИМ-генератора могут дополнительно буферироваться преобразователями уровня TTL-MOS (опция), что позволяет применять в силовой части привода драйверы различных фирм, в том числе с изолированными источниками питания ключей. Допускается подключение внешних источников питания для преобразователей уровня с диапазоном напряжений от 5 до 24 В. Предусмотрены программно-аппаратные средства безопасной инициализации при подаче напряжения питания на контроллер или при сбросе системы, исключающие случайное формирование отпирающих управляющих сигналов на драйверы силовых ключей в течение переходных процессов в цепях питания.
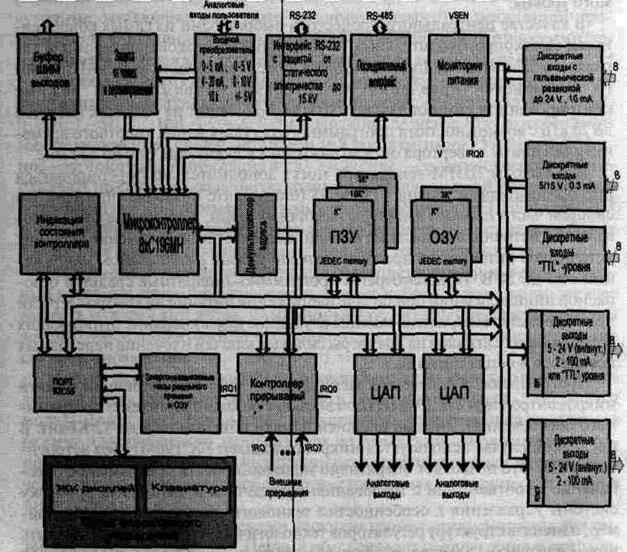
Рис. 17. Блок-схема универсального контроллера
Программное обеспечение располагается либо во внутренней памяти микроконтроллера 87С196МН (при поставке базового комплекта программного обеспечения), либо но внешней памяти объемом от 8 до 32 Кбайт. В последнем случае исполняется микроконтроллер 80С196МН без встроенного ПЗУ. Это позволяет оперативно модифицировать программное обеспечение в соответствии с требованиями заказчика и выполнять привязку системы управления к особенностям технологического процесса, например, изменять структуру регуляторов технологических переменных, вводить новые алгоритмы адаптивного управления и т.д.
Имеется также встроенная защита программного обеспечения от несанкционированного доступа.
Модуль памяти комплектуется различными типами внешней оперативной памяти:
• Статическим ОЗУ объемом от 8 до 32 Кбайт.
• Энергонезависимым ОЗУ объемом от 8 до 32 Кбайт с гарантированных сроком хранения данных до 10 лет.
Статическое ОЗУ используется исключительно для временного хранения промежуточных результатов, а также для ведения оперативного протокола с целью наблюдения за текущими значениями регулируемых переменных в приводе (мощность, ток и т.д.), а также за параметрами технологического процесса (давление в магистрали, расход, концентрация и т.д.).
Энергонезависимой ОЗУ используется для хранения параметров привода, преобразователя, Заводских уставок, а также заданных циклограмм управления технологическими переменными в функции времени (часовые, суточные, недельные, месячные, годовые циклы). Для реализации программного управления координатами привода или технологическими переменными в состав контроллера включены часы реального времени.
Контроллер имеет Унифицированный интерфейс с различными источниками аналоговых сигналов в большинстве промышленных стандартов: 0-5В, 0-10В, +/-5В,+/-10В,4-20мА,0-5мА, внешний резистор 10 кОм и обеспечивает подключение в общей сложности до 8 таких сигналов (5 из них внутренние - датчики тока, напряжения и т.д., 3 внешние, — задание скорости, обратная связь по скорости, Задание технологической переменной, обратная связь по технологической переменной, возмущающее воздействие). Точность АЦП составит 10 разрядов, время одного преобразования 10 мкс, максимальная абсолютная погрешность не более +/-3 единиц младшего разряда.
Модуль ввода аналоговых сигналов имеет встроенный высокостабильный источник опорного напряжения, а также наборное поле, позволяющее выбрать нужный тип входа. Функциональное назначение каждого из аналоговых входов программно настраивается в процессе конфигурирования системы управления.
Модуль вывода аналоговых сигналов позволяет выводить во вне до 8 аналоговых сигналов с разрешением 1/256 в диапазоне 0-5 В или -5,+5 В. Этот модуль может быть использован для управления шаговыми двигателями в режиме электрического дробления шага (до 4-х осей одновременно от одного контроллера) или для индикации скорости привода или текущих значений технологических переменных на стрелочных или других аналоговых индикаторах.
Для сопряжения с системами верхнего уровня предусмотрены два интерфейса RS-232 и RS-485. Первый обеспечивает подключение к преобразователю любого компьютера или промконтроллера, в том числе «на ходу».
Эта возможность позволяет выполнить настройку преобразователя или диагностику оборудования с использованием портативных компьютеров в качестве переносных пультов оперативного управления. Второй позволяет подключить к одному каналу связи до 32-х преобразователей частоты и организовать не только управление преобразователями в реальном времени от системы верхнего уровня, но и сбор информации о состоянии привода и локально-контролируемого технологического оборудования.
Последовательные каналы связи дополнительно могут использоваться для подключения удаленных датчиков технологических переменных: температуры, уровня жидкости и т.д.
Контроллер имеет мощную встроенную систему ввода/вывода дискретных сигналов. что позволяет подключать кнопочные станции, командо-аппараты, датчики состояния технологического оборудования и т.д., а также выводить управляющие воздействия дискретного типа и информационные сигналы о состоянии привода.
Входные дискретные сигналы могут быть трех типов: ТТЛ-уровня, 15В и 24 В. Для входных сигналов напряжением 15 В предусмотрена дополнительная защита от помех триггерами Шмитта. Дискретные входы 24 В имеют встроенную гальваническую развязку. Выходные дискретные сигналы могут быть нескольких типов: ТТЛ, с регулируемым выходным напряжением в диапазоне от 5 до 24 В за счет подсоединения внешнего источника питания.
Если по условиям эксплуатации необходимо использовать релейные входы или выходы, те к контроллеру подключается дополнительная интерфейсная плата на 8 входов, 8 выходов.
Система прерываний микроконтроллера 8хС196МН расширена с помощью дополнительной БИС контроллера прерываний, что позволяет вводить по прерываниям ряд дискретных сигналов с датчиков, например, теплового перегрева инвертора, двигателя и т.д.
Возможности системы управления позволяют вводить (и выводить) также импульсные сигналы, например с импульсных датчиков положения, причем с автоматической идентификацией процессором скорости двигателя в широком диапазоне (вплоть до 10000 об/мин.). Измерение скорости производится с aвтоматическим программным переключением диапазонов с целью получения максимальной точности в каждом диапазоне. Это позволяет применять частотно-регулируемые асинхронные привода в точных замкнутых системах управления. Имеется также ряд дополнительных возможностей по организации синхронной работы нескольких приводов, по организации управления группой шаговых двигателей (до четырех осей) с автоматическим контролем выпадения двигателей из синхронизма.
Набор программного обеспечения зависит от типа привода. Комплект программного обеспечения для асинхронного привода реализует функции автоматического регулирования выходного напряжения в функции текущей выходной частоты, задатчика интенсивности, блока ограничения резонансных частот, выбора заданного типа торможения, технологического регулятора и т.д. Разумеется реализованы и функции защиты двигателя и преобразователя: максимально-токовая, время-токовая, от сквозных токов, от обрыва и перекоса фаз, от недопустимого отклонения напряжения сети и другие.
В состав программного обеспечения входят драйверы дисплея и клавиатуры пульта оперативного управления, драйверы последовательных каналов связи, программе -монитор и другое системное программное обеспечение.
Выводы
• Рассматриваемая в качестве примера версия системы управления преобразователями частоты открывает богатейшие возможности по автоматизированной настройке параметров преобразователя в процессе пуско-наладочных работ, по автоматической адаптации режима работы привода к условиям эксплуатации, по решению различных задач оптимального управления. Она сочетает в себе возможности качественного прямого цифрового управления инвертором с возможностями управления те отологическими переменными.
"1 часть" - тут тоже много полезного для Вас.
• Пользователь вместе с преобразователем получает и встроенный промконтроллер средней производительности, приобретая возможность создавать узлы локальной автоматизации, которые затем, при необходимости, можно легко подключить по каналу связи к системе управления более высокого уровня, с целью как удалённого управления, так и наблюдения за регулируемыми переменными и состоянием привода.
• Унифицированные интерфейсы позволяют использовать одну и ту же систему управление для приводов различных типов: постоянного тока, синхронных, шаговых, асинхронных и вентильных.
• Управляющие воздействия можно вводить через аналоговые входы, дискретные входы; или по одному из каналов последовательной связи. Гибкая система настройки конфигурации системы управления позволяет выполнять программную перенастройку функционального назначения входов системы управления оптимальным образом.
• Русифицированный дисплей пульта оперативного управления позволяет создавать дружественное программное обеспечение с интуитивно понятной мнемоникой. Возможно конфигурирование системы управления, настройка и местное управление с использованием портативного компьютера, подключенного к системе по последовательному каналу связи.
• При переходе к массовому производству изделий с встроенными системами управления аппаратная часть унифицированного контроллера может быть легко минимизирована в соответствии с требованиями конкретной задачи.
• Использование перспективных систем встроенного управления преобразователями частоты насосов холодного и горячего водоснабжения жилых и промышленных зданий позволяет экономить до 50% электроэнергии и до 15% воды. При этом срок окупаемости преобразователя не превышает одного года. В условиях начавшейся в России коммунальной реформы, актуальность работ в этом направлении не вызывает сомнений.
















