
Электроизмерительные цепи ИИС
1. ЭЛЕКТРОИЗМЕРИТЕЛЬНЫЕ ЦЕПИ ИИС.
5.1 Виды модуляции сигналов в ИИС, [Л.8, с.213-216].
5.2 Многоканальные системы, мультиплексирование,[Л.2, с.217-220].
Существуют два основных подхода к обработке более чем одного аналогового сигнала. Долгое время наиболее популярным был способ аналогового мультиплексирования всех входных каналов с использованием одного АЦП для выполнения преобразований. Одной из причин популярности этого способа являлась высокая стоимость АЦП. В альтернативном подходе используются отдельные АЦП для каждого канала. Этот способ имеет некоторые преимущества, и он становится все более привлекательным для практической реализации в связи с уменьшением стоимости АЦП.
Аналоговое мультиплексирование. На рис. 5.13 показана наиболее часто используемая конфигурация системы сбора данных с аналоговым мультиплексированием каналов. По команде мультиплексор соединяет выбранный канал в УВХ, которое делает выборку и затем хранит ее для преобразования в АЦП. Заметим, что УВХ позволяет мультиплексору при необходимости переключиться на другой канал, в то время как АЦП еще выполняет преобразование. Это означает, что время переключения мультиплексора и его время установления не влияют на производительность системы. Одной из модификаций этой конфигурации является система одновременной выборки. УВХ устанавливаются на входах мультиплексора и запускаются по одной и той же команде SAMPLE. Это позволяет получить отсчеты значений двух или большего числа сигналов точно в один и тот же момент времени, что иногда требуется для некоторых систем управления и обработки сигналов.
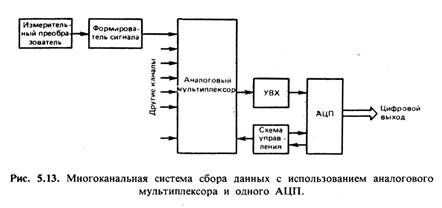
В аналоговых мультиплексорах чаще всего используются полу проводниковые ключи (на полевых транзисторах с управляемым pn-переходом и КМОП-транзисторах). Матрица управляемых ключей изготавливается в виде монолитной ИС, которая, как правило, содержит и дешифратор, позволяющий использовать лишь несколько управляющих линий для выбора любого сигнального канала. Широкое распространение получили мультиплексоры на 4, 8 и 16 каналов, допускающие работу с заземленными или дифференциальными входными сигналами. Мультиплексор должен сначала отключать текущий коммутируемый вход и только затем подключать следующий, чтобы гарантировать отсутствие короткого замыкания двух входных линий. Другими важными рабочими характеристиками аналогового мультиплексора являются сопротивление его ключей в открытом состоянии, токи утечки ключей в закрытом состоянии, точность коэффициента передачи, перекрестные помехи и время установления. На сопротивлении открытого ключа входной сигнал создает некоторое падение напряжения, приводящее к погрешности коэффициента передачи. Эту погрешность можно минимизировать, нагружая мультиплексор схемой с большим входным сопротивлением. В частности, уменьшению погрешности коэффициента передачи способствует высокое входное сопротивление подключаемого к выходу мультиплексора УВХ. Точность коэффициента передачи — это выраженная в процентах погрешность передачи входного сигнала на выход мультиплексора. Перекрестные помехи возникают в результате паразитной связи между выходом мультиплексора и входом закрытого ключа. Время установления — это время, необходимое для того, чтобы значение выходного сигнала мультиплексора оказалось и в дальнейшем оставалось внутри некоторого установленного диапазона значений вблизи уровня подключаемого входного сигнала. Разработчик должен знать величину этого параметра, чтобы запускать УВХ только после указанной стабилизации уровня выходного сигнала мультиплексора.
Параллельное преобразование. При параллельном способе сбора данных для каждого канала используется отдельный АЦП (рис. 5.14). Преимущества такого подхода проявляются в промышленных системах сбора данных, когда измерительные преобразователи распределены по большой площади и, как правило, работают в условиях сильных внешних помех. Установка АЦП вблизи измерительных преобразователей и передача преобразованных данных в цифровой форме предотвращают прохождение аналоговых сигналов через области действия помех. При таком подходе обеспечивается также гальваническая развязка и исключается появление земляных контуров (принципы реализации интерфейса для таких систем обсуждались в разд. 5.3).

Рекомендуемые материалы
Рис. 5.14. Многоканальная система сбора данных с использованием отдельных АЦП для каждого канала и цифрового мультиплексора.
Наличие отдельного АЦП для каждого канала позволяет реализовать намного большую частоту дискретизации в расчете на канал. И наоборот — для реализации заданной производительности можно использовать менее быстродействующие АЦП.
(дополнительный материал: ЛР №5 ”ИИС на примере контроллера SSJKS4. Исследование работы аналогового мультиплексора”.)
5.3 АНАЛОГО-ЦИФРОВОЕ ПРЕОБРАЗОВАНИЕ.[Л.2, глава 5, с.189]
Преимущества обработки информации и осуществления функций управления с использованием цифровых методов становятся все более очевидными. Однако данные, которые мы получаем из реального мира, обычно представлены в аналоговой форме. Необходимый аналого-цифровой интерфейс обеспечивает система сбора данных. Она преобразует исходные данные от одного или нескольких измерительных преобразователей в выходной сигнал, пригодный для цифровой обработки; преобразование осуществляется с помощью таких компонентов, как усилители, фильтры, схемы выборки — хранения, мультиплексоры и аналого-цифровые преобразователи (АЦП).
В этой главе в фокусе нашего обсуждения будет аналого-цифровой преобразователь — наиболее важная часть любой системы сбора данных. Сначала подробно обсуждаются принципы аналого-цифрового преобразования, конкретные функциональные схемы преобразователей, а также принципы выбора АЦП и их сопряжения с другими устройствами. Затем описываются системы сбора данных и их компоненты. В конце главы рассматривается конструкция 16-канальной недорогой системы сбора данных для IВМ РС.
5.3.1 ПРИНЦИПЫ РАБОТЫ АЦП.
В этом разделе вводятся основные понятия и определяются некоторые широко используемые термины, относящиеся к АЦП, а также описываются характеристики входных и выходных сигналов типичного АЦП [З].
Основное соотношение между входными и выходными сигналами
Аналого-цифровое преобразование по существу является операцией, устанавливающей отношение двух величин. Входной аналоговый сигнал vi преобразуется в дробь x путем сопоставления его значения с уровнем опорного сигнала Vr. Цифровой сигнал преобразователя есть кодовое представление этой дроби. Это фундаментальное соотношение иллюстрируется на рис. 5.1 (а). Если выходной код преобразователя является n-разрядным, то число дискретных выходных уровней равно 2 . Для взаимно-однозначного соответствия диапазон изменения входного сигнала должен быть разбит на такое же число уровней. Каждый квант (величина интервала) такого разбиения представляет собой значение аналоговой величины, на которое отличаются уровни входного сигнала, представляемые двумя соседними кодовыми комбинациями. Этот квант называют также величиной младшего значащего разряда (МЗР). Таким образом,
. Для взаимно-однозначного соответствия диапазон изменения входного сигнала должен быть разбит на такое же число уровней. Каждый квант (величина интервала) такого разбиения представляет собой значение аналоговой величины, на которое отличаются уровни входного сигнала, представляемые двумя соседними кодовыми комбинациями. Этот квант называют также величиной младшего значащего разряда (МЗР). Таким образом,
Q = МЗР ПД/2,
Где Q — квант, МЗР — аналоговый эквивалент МЗР и ПД — полный диапазон изменения входного аналогового сигнала.
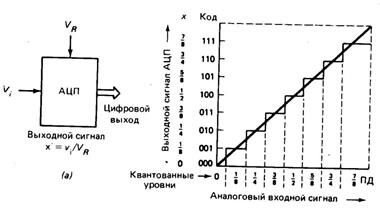
Все аналоговые величины внутри заданного интервала разбиения представляются одним и тем же цифровым кодом, которому обычно ставят в соответствие значение аналоговой переменной в средней точке интервала, называемое пороговым уровнем [5]. Тот факт, что входной сигнал может отличаться от порогового уровня на величину, достигающую ±  МЗР, не отличаясь при этом по кодовому представлению, означает, что любому процессу аналого-цифрового преобразования присуща неопределенность (погрешность) дискретизации, равная ± МЗР. Ее влияние можно только уменьшить, увеличивая число разрядов в выходном коде преобразователя. На рис. 5.1(6) иллюстрируется взаимосвязь входных и выходных сигналов для идеального 3-разрядного АЦП. Величина МЗР равна
МЗР, не отличаясь при этом по кодовому представлению, означает, что любому процессу аналого-цифрового преобразования присуща неопределенность (погрешность) дискретизации, равная ± МЗР. Ее влияние можно только уменьшить, увеличивая число разрядов в выходном коде преобразователя. На рис. 5.1(6) иллюстрируется взаимосвязь входных и выходных сигналов для идеального 3-разрядного АЦП. Величина МЗР равна  ПД, а диапазон изменения входного сигнала разбит на 8 отдельных уровней, от 0 до
ПД, а диапазон изменения входного сигнала разбит на 8 отдельных уровней, от 0 до  ПД. Обратим внимание, что максимальное двоичное число 111 на выходе преобразователя соответствует не полному диапазону, а ПД. С учетом того, что одна из кодовых комбинаций присваивается нулевому уровню входного сигнала, максимальный выходной сигнал АЦП всегда соответствует аналоговой величине полного диапазона минус 1 МЗР.
ПД. Обратим внимание, что максимальное двоичное число 111 на выходе преобразователя соответствует не полному диапазону, а ПД. С учетом того, что одна из кодовых комбинаций присваивается нулевому уровню входного сигнала, максимальный выходной сигнал АЦП всегда соответствует аналоговой величине полного диапазона минус 1 МЗР.
5.3.2 Погрешности преобразователя
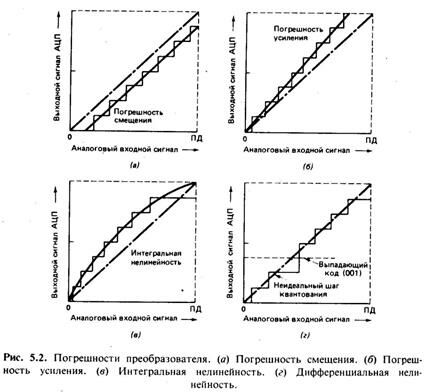
Характеристики реальных преобразователей по ряду параметров могут отличаться от идеальных характеристик (аналогичных идеальной характеристике на рис. 5.1(6). Передаточная характеристика преобразователя может быть сдвинута относительно идеальной характеристики (рис. 5.2(а)). Эта погрешность «смещения» или «установки нуля» определяется как значение аналоговой величины, при которой характеристика пересекает ось входных напряжений [4]. Наклон передаточной характеристики может отличаться от своего идеального значения, что приводит к погрешности «наклона» или «усиления» (рис. 5.2(6)). Для большинства имеющихся в продаже АЦП погрешности смещения и усиления или очень малы, или могут быть практически полностью устранены с помощью предварительных регулировок. Труднее устранить погрешности, связанные с нелинейностью передаточной характеристики, которые невозможно уменьшить с помощью регулировки. В АЦП проявляются два типа нелинейности – интегральная и дифференциальная. Интегральная нелинейность определяется максимальным отклонением передаточной характеристики от идеальной прямолинейной характеристики при нулевых значениях погрешностей смещения и усиления (рис. 5.2(в)). Дифференциальная нелинейность — это отклонение величины одного из квантов от его идеального аналогового значения. Заметим, что если дифференциальная нелинейность превышает 1 МЗР, то в выходном сигнале может отсутствовать одна из кодовых комбинаций (выпадающий код), как показано на рис. 5.2(г).
Разрешение преобразователя
Этот наиболее важный параметр преобразователя определяется как минимальная величина изменения аналогового напряжения на входе АЦП, вызывающая изменение выходного кода на один МЗР. Значение этого параметра обычно указывается в расчете на идеальный преобразователь и поэтому скорее отражает возможности преобразователя, чем его реальные рабочие характеристики. Разрешение может задаваться в процентах от полного диапазона, в милливольтах для заданного диапазона изменения входного сигнала или просто, как это чаще всего делается, числом разрядов преобразователя.
Точность преобразователя
Точность преобразователя определяется как максимальная разность между фактическим входным напряжением и аналоговым эквивалентом двоичного выходного кода при заданном полном диапазоне. Этот параметр называют абсолютной точностью, когда его значение указывается в реальных вольтах. Однако гораздо чаще при определении точности на единицу измерения аналогового сигнала принимается величина МЗР; тогда речь идет об относительной точности. В любом случае, точность преобразователя есть максимальное значение суммы всех его погрешностей, включая погрешность квантования. В спецификации погрешностей преобразователя обычно указываются отдельные погрешности в единицах МЗР. Для преобразователей, которые не требуют коррекции смещения или усиления (к ним относится, например, АЦП ADC0816 фирмы National Semiconductor), может быть указана полная некорректируемая погрешность (± МЗР для ADC0816). Точность не всегда включается в технические характеристики АЦП, если указаны отдельные погрешности, но ее очень просто рассчитать.
Время преобразования и производительность преобразователя
После того как на АЦП поступает команда запуска, требуется некоторое конечное время, называемое временем преобразования  tc, прежде чем он сможет выдать правильные выходные данные. Изменение входного напряжения во время процесса преобразования вносит нежелательную неопределенность в генерируемый выходной сигнал [б]. Полная точность преобразования реализуется только в том случае, когда эта неопределенность не превосходит разрешения преобразователя. Таким образом, для п-разрядного преобразователя, характеризуемого временем преобразования , необходимо выполнение условия
tc, прежде чем он сможет выдать правильные выходные данные. Изменение входного напряжения во время процесса преобразования вносит нежелательную неопределенность в генерируемый выходной сигнал [б]. Полная точность преобразования реализуется только в том случае, когда эта неопределенность не превосходит разрешения преобразователя. Таким образом, для п-разрядного преобразователя, характеризуемого временем преобразования , необходимо выполнение условия



 .
.
Рассмотрим, например, синусоидальный входной сигнал с амплитудой А и частотой f:
Vi = A sin (2 ft),
ft),
преобразование которого осуществляется с помощью 8-разрядного преобразователя, и пусть время преобразования tc = 100 мкс. Скорость изменения входного сигнала
 = 2fA cos(2ft),
= 2fA cos(2ft),
а максимальное значение этой величины составляет
()= 2fA
Полагая ПД = 2А (полный размах синусоидального сигнала), получаем
2fA  ,
,
f  ,
,
f = = 12Гц.
Таким образом, даже в случае относительно гладкого синусоидального сигнала мы ограничены низкой частотой 12,4 Гц. При столь жестком ограничении диапазон применений АЦП был бы исключительно узок. Эта трудность обходится путем использования на входе АЦП схемы или устройства выборки — хранения (УВХ). УВХ — простая аналоговая схема, которая по команде осуществляет отсчет значения входного сигнала и затем сохраняет это значение на приблизительно постоянном уровне,пока АЦП выполняет преобразование. Временным интервалом, определяющим по приведенной выше формуле допустимую скорость изменения входного напряжения, является теперь время задержки, называемое также апертурным временем ta. Здесь имеется в виду характерная для УВХ задержка между моментом получения команды и моментом фактического перехода схемы в режим хранения (схемы выборки — хранения очень подробно обсуждаются в разд. 5.4). Типичное значение апертурного времени — несколько десятков наносекунд. Если мы используем УВХ с апертурным временем, скажем 20 нc, то максимальная допустимая частота входного сигнала составит
f =  = 62,17кГЦ
= 62,17кГЦ
Это вполне приемлемое значение для преобразователя с tс = 100 мкс. Значение f может быть увеличено еще на два порядка, если командный цикл короче апертурной задержки. Величину f определяет при этом намного меньшая задержка, называемая апертурным дрожанием.
Производительность преобразователя — еще один важный параметр. Это — число отсчетов входного сигнала, выполняемых преобразователем в единицу времени при сохранении полной точности. Производительность преобразователя рассчитывается как обратная величина полного времени, необходимого для выполнения одного завершенного преобразования. Она является обратной величиной времени преобразования только в том случае, когда не используется УВХ. Пример расчета производительности с учетом влияния УВХ приведен в разд. 5.6.
5.3.3 Входные и выходные сигналы преобразователя
Аналоговый входной сигнал. Большинство монолитных преобразователей сконструированы в расчете на работу с дифференциальным или отсчитываемым от потенциала земли однополярным входным сигналом. Уровень этого сигнала должен быть согласован с установленным входным диапазоном преобразователя. Чаще всего используются входные диапазоны 0...10В и 0...5В. Если фактический диапазон изменения входного сигнала составляет только часть полного входного диапазона преобразователя, то некоторые выходные кодовые комбинации преобразователя никогда не будут реализованы. При этом неоправданно сужается динамический диапазон преобразователя, что приводит к более сильному влиянию погрешностей преобразователя на выходной сигнал. Наилучшее решение этой проблемы — выбор преобразователя с наиболее подходящим входным диапазоном и предварительное масштабирование входного сигнала с помощью операционного усилителя. В большинстве систем входной сигнал обычно требует некоторой предварительной обработки, и согласование может быть выполнено в конечном каскаде соответствующей обрабатывающей схемы. В некоторых случаях недостаточный размах входного сигнала можно скомпенсировать путем пропорционального уменьшения масштаба опорного сигнала при условии, что в конструкции преобразователя предусмотрена возможность регулировки уровня опорного сигнала.
Для биполярного входного сигнала тоже можно использовать однополярный преобразователь, сначала масштабируя этот сигнал, а затем добавляя к нему напряжение смещения, как показано на рис. 5.3. Если же на выходе необходимо иметь информацию о полярности сигнала, приходится использовать биполярный преобразователь. Биполярные преобразователи работают с биполярными входными диапазонами, чаще всего от -5 до +5 В, и вырабатывают выходные сигналы в виде биполярных цифровых кодов (дополнительном, смещенном, прямом или обратном), которые обсуждались в разд. 4.1.
Аналоговый опорный сигнал. На рис. 5.4(а) показаны входы и выходы типичного АЦП. Для работы каждого АЦП нужен аналоговый опорный сигнал, с которым сравнивается входной сигнал.
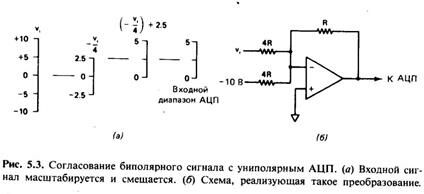
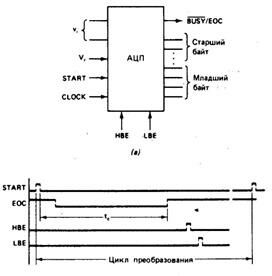
Рис. 5.4 Аналого-цифровой преобразователь (АЦП). (а) Типичные входы и выходы. (б) Типичные временные диаграммы управляющих сигналов.
Любая погрешность опорного сигнала, связанная с неточностью его первоначальной установки или температурным и временным дрейфом, проявляется как погрешность усиления в передаточной характеристике АЦП. Поэтому точность и стабильность опорного сигнала являются важнейшими факторами в реализации полной точности АЦП. Дешевые интегральные стабилизаторы представляют собой подходящие источники опорного сигнала при условии, что окружающая температура изменяется в небольших пределах. Однако для большинства применений требуется лучшая температурная стабильность, которая может быть обеспечена прецизионными интегральными источниками опорного напряжения.
Существующие источники опорного напряжения на ИС можно разделить на два типа. В источниках первого типа используется обратный пробой компенсированного зенеровского диода (стабилитрона). Типичное напряжение таких источников равно примерно 6,9В, а температурный коэффициент напряжения изменяется в диапазоне (5...100)∙10 /˚С. В новейших устройствах этого типа используются «подповерхностные» или «скрытые» зенеровские диоды, в которых лавинный пробой происходит под поверхностным слоем кремния. Такая конструкция обеспечивает улучшение долговременной стабильности и шумовых характеристик. Интегральные источники опорного напряжения второго типа — это стабисторные источники, использующие прямое падение напряжения на диоде, которое определяется шириной запрещенной зоны. Вырабатываемое ими опорное напряжение соответствует экстраполированному значению ширины запрещенной зоны кремния (выраженному в вольтах). Температурная компенсация в этих источниках основана на использовании напряжений база — эмиттер двух транзисторов с различными токами смещения. Типичное значение напряжения таких источников равно 1,2 В.
/˚С. В новейших устройствах этого типа используются «подповерхностные» или «скрытые» зенеровские диоды, в которых лавинный пробой происходит под поверхностным слоем кремния. Такая конструкция обеспечивает улучшение долговременной стабильности и шумовых характеристик. Интегральные источники опорного напряжения второго типа — это стабисторные источники, использующие прямое падение напряжения на диоде, которое определяется шириной запрещенной зоны. Вырабатываемое ими опорное напряжение соответствует экстраполированному значению ширины запрещенной зоны кремния (выраженному в вольтах). Температурная компенсация в этих источниках основана на использовании напряжений база — эмиттер двух транзисторов с различными токами смещения. Типичное значение напряжения таких источников равно 1,2 В.
Источники опорного напряжения обоих типов следует использовать с буферными схемами (иногда располагаемыми на самом кристалле) для масштабирования напряжения к требуемому уровню и улучшения стабильности рабочей точки. Такие буферизованные источники опорного напряжения на ИС — наиболее подходящие источники опорного сигнала для большинства АЦП.
Выходные сигналы. Выходной цифровой сигнал АЦП характеризуется числом разрядов (разрешением) и типом используемого кода. Наибольшее распространение получили преобразователи с 8- и 12-разрядным разрешением. Однако имеется также достаточно широкий выбор преобразователей с разрешением 10 разрядов. 3цифры двоично-десятичного кода, 14 и 16 разрядов. В униполярных преобразователях в качестве выходного кода чаще всего используется обычный двоичный код. Выходные сигналы преобразователей, специально разрабатываемых для измерительных приборов с цифровым отображением информации и цифровых мультиметров, практически всегда представляются в двоично-десятичном коде. Эти и другие широко используемые коды обсуждаются в разд. 4.1.
Управляющие сигналы. Для функционирования любого АЦП требуются синхронизирующий и некоторые управляющие сигналы. Представление об управляющих сигналах лучше всего получить, рассматривая один цикл преобразования типичного АЦП (рис. 5.4(6)). Внешнее устройство, с которым связан АЦП (например, микропроцессор), инициирует процесс преобразования путем переключения на мгновение входа START АЦП в состояние высокого уровня. В момент начала процесса преобразования АЦП переводит в состояние низкого уровня свою линию BUSY/EOC (АЦП занят/ Преобразование завершено). Таким образом, внешним устройствам сообщается, что идет процесс преобразования и что пока еще не следует вести поиск выходных данных и не следует инициировать новый цикл преобразования. По завершении текущего преобразования АЦП возвращает эту линию в исходное состояние высокого уровня. Этот переход, как правило, используется для генерации сигнала прерывания микропроцессора или какого-либо другого сигнала, сообщающего внешнему устройству о завершении преобразования. Внешнее устройство посылает в АЦП сигнал разрешения вывода (ОЕ), разрешающего АЦП выдачу выходного слова на шину данных. В преобразователях с более чем 8-разрядным разрешением сигнал ОЕ может разбиваться на два сигнала — разрешения вывода старшего байта (НВЕ) и разрешения вывода младшего байта (LBE), в результате чего выходное слово преобразователя может передаваться по 8-разрядной шине данных в виде двух последовательных посылок.
5.3.4 МЕТОДЫ АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ
В этом разделе мы обсудим некоторые основные схемотехнические приемы, используемые при построении внутренних функциональных структур АЦП. Будут рассмотрены важнейшие характеристики этих конструкций.
Большинство схемных реализаций АЦП основано или на использовании внутреннего ЦАП, или на применении некоторого способа интегрирования для осуществления функции преобразования. Существуют АЦП, не относящиеся ни к одному из этих двух широких классов преобразователей; в них реализован способ параллельного или мгновенного преобразования, используемый главным образом для построения сверхбыстродействующих АЦП.
АЦП с динамической компенсацией и следящий АЦП
На рис. 5.5(а) показана структурная схема АЦП с динамической компенсацией. В этом АЦП используется счетчик импульсов, который в процессе счета обеспечивает постепенное нарастание выходного сигнала связанного с ним ЦАП, пока этот сигнал не превысит уровень входного сигнала. Счетчик сбрасывается перед началом каждого преобразования и затем увеличивает свое содержимое на 1 при прохождении каждого тактового импульса. Выходной сигнал ЦАП при каждом единичном изменении состояния счетчика возрастает на величину МЗР, как показано на рис. 5.5(6). Компаратор останавливает счетчик, когда выходное напряжение ЦАП достигает уровня входного сигнала. Выходной сигнал (состояние) счетчика в этот момент как раз и является цифровым выходным сигналом АЦП. Главный недостаток этого простого способа аналого-цифрового преобразования — зависимость времени преобразования от уровня входного сигнала, причем это время может быть к тому же довольно велико (2 периодов тактовых импульсов для n-разрядного преобразователя в случае входного сигнала, близкого по уровню к величине полного диапазона).
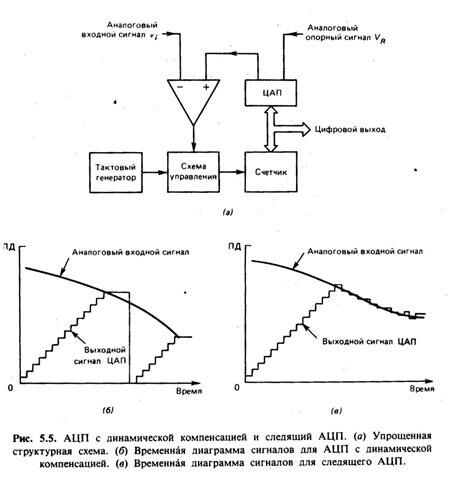
В модифицированном варианте АЦП с динамической компенсацией — так называемом «следящем» АЦП (или «серво-АЦП») — используется реверсивный счетчик, позволяющий ЦАП непрерывно отслеживать входной сигнал при условии, что изменения входного сигнала невелики. На рис. 5.5(в) иллюстрируется характер изменения выходного сигнала ЦАП в АЦП следящего типа. Останавливая счетчик подачей внешнего воздействия в нужный момент времени, мы можем использовать следящий АЦП в качестве УВХ с цифровым выходом и сколь угодно большим временем хранения. Допуская возможность счета или только в прямом, или только в обратном направлении, можно с помощью этого АЦП получать цифровой выходной сигнал, соответствующий максимальному или минимальному значению входного сигнала в данном временном интервале.
АЦП последовательного приближения
Метод последовательного приближения — наиболее распространенный способ реализации функции аналого-цифрового преобразования в преобразователях со средним и высоким быстродействием. В структуру АЦП последовательного приближения также входит ЦАП. Однако в отличие от АЦП с динамической компенсацией в АЦП последовательного приближения выходной сигнал ЦАП нарастает до уровня входного сигнала точно за n тактов (для n-разрядного преобразователя). В результате процесс преобразования занимает гораздо меньше времени, и, кроме того, время преобразования не зависит от уровня входного сигнала. Данный метод основан на аппроксимации входного сигнала двоичным кодом и последующей проверке правильности этой аппроксимации для каждого разряда кода, пока не достигается наилучшее приближение к величине входного сигнала. На каждом этапе этого процесса двоичное представление текущего приближения хранится в так называемом регистре последовательного приближения (РПП).
На рис. 5.6 показана базовая функциональная схема 3-разрядного АЦП последовательного приближения с иллюстрацией принципа ее работы. Преобразование всегда начинается с установки единичного значения СЗР в РПП.
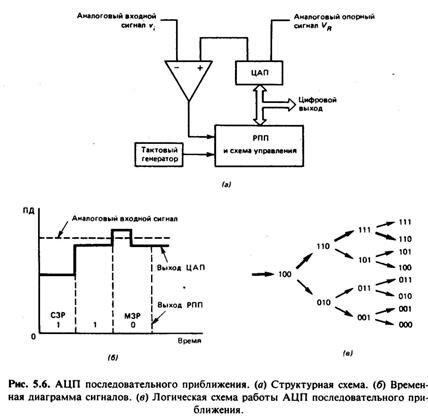
Это соответствует первоначальной оценке величины входного сигнала половиной величины полного диапазона (полной шкалы). Компаратор сравнивает выходной сигнал ЦАП с входным напряжением и выдает контроллеру команду на сброс СЗР, если эта первоначальная оценка превышает величину входного сигнала; в противном случае остается установленное значение СЗР. В следующем такте котроллер устанавливает в единичное значение следующий (по старшинству) разряд, и снова, исходя из уровня входного сигнала, компаратор «решает», сбрасывать или оставлять установку этого разряда. Преобразование продолжается аналогичным образом, пока не будет проверен последний МЗР. В этот момент содержимое РПП и выходного регистра является наилучшим двоичным приближением входного сигнала — это и есть выходной цифровой сигнал (слово) АЦП. Поскольку в процессе последовательного приближения установка значений разрядов выполняется в последовательном порядке, то в АЦП этого типа исключительно просто обеспечивается последовательный вывод данных. Обратим внимание, что предполагалось постоянство уровня входного сигнала в процессе преобразования. Вообще говоря, мы не можем гарантировать выполнение этого условия, и необходимо учитывать влияние изменения входного напряжения на выходной сигнал преобразователя; эта проблема обсуждалась в разд. 5.1.
Двухтактный интегрирующий АЦП
На рис. 5.7 иллюстрируется метод двухтактного (или двойного) интегрирования. Входное напряжение интегрируется в течение фиксированного интервала времени Т1, который, как правило, соответствует временной реализации всей счетной последовательности внутреннего счетчика. В конце этого интервала счетчик сбрасывается, а вход интегратора переключается на источник опорного сигнала. Выходное напряжение интегратора теперь уменьшается по линейному закону, пока не достигается его нулевое значение, где счетчик останавливается и интегратор устанавливается в исходное состояние. Заряд, накопленный интегрирующим конденсатором в течение первого интервала, должен быть равен заряду, потерянному им в течение второго интервала; значит,
 .
.
Отсюда следует

Заметим, что отношение временных интервалов является одновременно отношением содержимого счетчика к числовому выражению полного диапазона счета. Другими словами, состояние счетчика в конце интервала t2 представляет собой выходное слово на двоичном выходе АЦП, Рассмотренная схема преобразования легко модифицируется для АЦП, использующих другие выходные коды.
Метод двухтактного интегрирования обеспечивает ряд преимуществ, главное из которых — отличные шумовые характеристики.
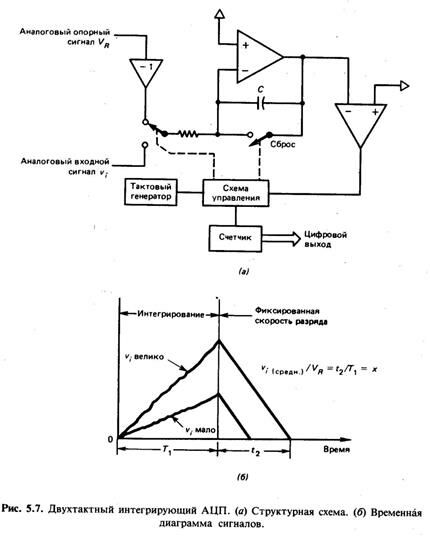
Поскольку входное напряжение интегрируется в течение некоторого промежутка времени, любые высокочастотные шумы, накладывающиеся на входной сигнал, при интегрировании компенсируются. Кроме того, фиксированный временной интервал Т1 можно выбрать таким, чтобы почти полностью исключить помехи с частотами, кратными 1/Т1. Для этой цели обычно выбирается временной интервал, определяемый частотой бытовой сети.
Следует отметить, что вариации частоты синхронизации не влияют на разрешение. Разрешение преобразователя ограничено только возможностями входящих в него аналоговых схем, а не дифференциальной нелинейностью, так как выходной сигнал интегратора непрерывен и не может приводить к появлению каких-либо выпадающих кодовых комбинаций на выходе преобразователя. Поэтому довольно просто получить хорошее разрешение и варьировать его путем изменения разрядности внутреннего счетчика и частоты синхронизации.
Главный недостаток двухтактного интегрирующего АЦП — низкое быстродействие. Например, если Т1 выбирается из условия ослабления сетевых наводок с частотой 60Гц и их гармоник, то минимальное возможное значение Т1 будет равно 16,67 мс. Поскольку время преобразования может вдвое превышать эту величину, то производительность преобразователя ограничена 30 отсчетами в секунду; такая производительность слишком мала для любой быстродействующей системы сбора данных. Двухтактные интегрирующие преобразователи широко используются в измерительных устройствах с отображением информации на цифровых индикаторных панелях, в цифровых мультиметрах и термометрах и в других аналогичных устройствах, где допустима низкая скорость отсчетов.
АЦП с преобразованием напряжения в частоту

На рис. 5.8 представлена схема метода аналого-цифрового преобразования с использованием преобразования напряжения в частоту. Аналоговое входное напряжение преобразуется с помощью прецизионного преобразователя напряжение — частота (ПНЧ) в последовательность импульсов, частота которых пропорциональна величине этого напряжения. Затем счетчик формирует выходное цифровое слово путем подсчета этих импульсов в течение фиксированного интервала времени. Заметим, что входной сигнал эффективно интегрируется в этом интервале. Как и метод двухтактного интегрирования, данный метод преобразования характеризуется низким быстродействием, но хорошей помехоустойчивостью.
Если приемлемо большое время преобразования, метод преобразования напряжение — частота позволяет получить высокое разрешение для медленно изменяющихся сигналов при очень низкой стоимости. Например, при подсчете импульсов ПНЧ с частотой 10 кГц в течение 1 с обеспечивается точность 10-5 (т. е. лучшая, чем при 13-разрядном разрешении). Более того, эта точность сохраняется в широком диапазоне изменения величины входного сигнала. Громадные преимущества использования преобразования напряжение — частота очевидны для систем дистанционного считывания данных в условиях внешних помех. В таких применениях ПНЧ располагается в непосредственной близости к удаленному измерительному преобразователю. Последовательность импульсов, вырабатываемых ПНЧ, в цифровой форме передается на большие расстояния к станции контроля, где приемно-счетное устройство преобразует эту последовательность в цифровой выходной сигнал. Тем самым исключается передача аналогового сигнала по подверженным внешним помехам линиям передачи и возможное при такой передаче ухудшение отношения сигнал/шум. Передача данных в цифровой форме исключает также синфазные помехи. При необходимости может быть обеспечена гальваническая развязка выхода преобразователя с датчиком; это требуется при осуществлении контроля и управления в высоковольтных системах.
Практическая эффективность использования данного метода аналого-цифрового преобразования зависит от наличия дешевых ПНЧ с хорошей линейностью и стабильностью. Имеется несколько методов реализации функции преобразования напряжения в частоту. Наиболее известный из них — метод зарядового уравновешивания, который обсуждался в разд. 1.9, где были также описаны некоторые ПНЧ, имеющиеся в продаже.
АЦП параллельного, или мгновенного, преобразования
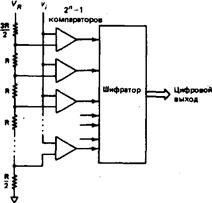
Метод мгновенного, или параллельного, преобразования иллюстрируется на рис. 5.9. Он используется в тех случаях, когда требуется очень высокая скорость преобразования, например в видеотехнике, радиолокации, в цифровых осциллографах. В этом методе входной сигнал сравнивается одновременно со всеми пороговыми уровнями с помощью компараторов, смещенных по уровню опорного сигнала на 1 МЗР относительно друг друга. Смещение в преобразователе обеспечивается путем использования генератора опорного сигнала и прецизионной резистивной схемы. При подаче аналогового сигнала на вход АЦП компараторы, смещенные выше уровня входного сигнала, имеют на выходе логический 0, а смещенные ниже этого уровня — логическую 1. Так как все компараторы изменяют свое состояние одновременно, процесс квантования осуществляется за один шаг. Быстродействующий шифратор затем преобразует выходные сигналы компараторов в выходной сигнал всего АЦП. Скорость преобразования в этом случае достигает 100МГц при 8-разрядном разрешении. Однако разрешение монолитных параллельных преобразователей ограничено из-за большого числа требуемых компараторов (255 для 8-разрядного АЦП).
Программная реализация аналого-цифрового преобразования
Такие функции, как счет, сдвиг, инвертирование, преобразование кодов и некоторые другие реализуются с помощью программных средств самого микропроцессора. Иногда используется такая программная реализация аналого-цифрового преобразования. Однако ее практическая ценность невелика, поскольку имеется очень большой выбор дешевых АЦП с хорошими рабочими характеристиками.
5.4 Рекомендации по выбору и использованию АЦП. [Л.2, глава 5, с.220-229]
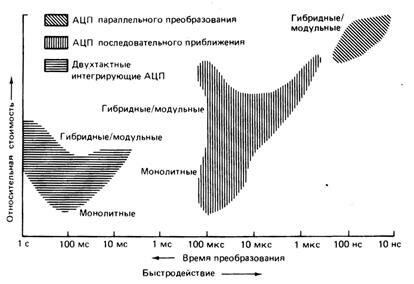
Аналого-цифровые преобразователи. Фирмы, выпускающие АЦП, предлагают устройства с очень широким диапазоном рабочих параметров. Используемый метод преобразования (последовательного приближения, двухтактного интегрирования, параллельного преобразования или какой-либо другой из рассмотренных в разд. 5.2) и технология изготовления схемы (монолитная, гибридная, модульная) определяют наиболее существенные характеристики АЦП – быстродействие, разрешение, стоимость. Диапазоны изменения некоторых характеристик серийно выпускаемых АЦП разного типа представлены на рис. 5.15.
Наиболее широк выбор АЦП последовательного приближения,используемых в большинстве случаев применения аналого-цифрового преобразования. Самыми дешевыми являются монолитные АЦП. За последние несколько лет сделан громадный скачок в улучшении их рабочих параметров. Монолитные АЦП изготавливаются с использованием КМОП- и биполярной технологий. КМОП АЦП характеризуются очень малым энергопотреблением и допускают реализацию на самом кристалле аналогового мультиплексора, входного фиксатора, дешифратора и тристабильного буфера. Однако в КМОП-технологии возникают трудности с формированием прецизионного источника опорного сигнала и прецизионного быстродействующего компаратора. Биполярная технология обеспечивает простую реализацию этих функций, но при относительно невысоком уровне интеграции. Эти ограничения можно обойти при использовании И Л-схемотехники. В этом случае удается создать законченный интегральный АЦП с тактовым генератором, источником опорного сигнала и соответствующими буферными схемами на одном кристалле.
Л-схемотехники. В этом случае удается создать законченный интегральный АЦП с тактовым генератором, источником опорного сигнала и соответствующими буферными схемами на одном кристалле.
5.4.1 Выбор АЦП
Чтобы правильно выбрать АЦП для конкретного применения, нужно знать обусловленные этим применением требования к его рабочий параметрам — разрешению, времени преобразования, допустимой погрешности и т. д. Эти требования определяются проектируемыми техническими характеристиками разрабатываемой системы сбора данных. Наиболее важными являются следующие характеристики:
§ Число аналоговых каналов.
§ Производительность. Учитывается как производительность всей системы, так и максимальная производительность для отдельных каналов.
§ Расположение измерительных преобразователей (вблизи или в удалении от выходного терминала).
§ Точность преобразования.
§ Окружение. В частности, важно знать уровень электрических помех и диапазон изменения окружающей температуры.
§ Стоимость системы
Разработка системы обычно начинается с выбора ее конфигурации (см. разд. 5.4). Затем выясняются требования к рабочим характеристикам каждого компонента системы. Мы обсудим этот этап на примере АЦП.
Точность АЦП. Требования к точности преобразователя вытекают из соответствующей технической характеристики разрабатываемой системы сбора данных с учетом погрешностей, вносимых всеми другими компонентами этой системы. Распространенная ошибка — выбор АЦП с разрешением, удовлетворяющим этому требованию по точности, поскольку фактическая точность преобразователя хуже того значения, на которое указывает разрешение, в силу наличия различных погрешностей преобразователя. Список вкладов основных погрешностей, называемый бюджетом погрешностей, помогает рассчитать реальную точность преобразователя. Пример составления бюджета погрешностей и расчета точности приведен в разд. 5.6.
Время преобразования. Требуемое от АЦП число преобразований, выполняемых за одну секунду, определяется проектируемой производительностью системы сбора данных, числом каналов и выбранной конфигурацией системы. Частота дискретизации по одному каналу равна производительности АЦП только в том случае, когда для каждого канала используется отдельный АЦП. Список всех временных задержек, связанных с одним преобразованием, называется временным бюджетом. Производительность АЦП рассчитывается, исходя из этого временного бюджета. Пример расчета производительности АЦП приведен в разд. 5.6.
Тип АЦП. Для выбора типа АЦП обычно достаточно информации об используемой конфигурации системы, требуемом разрешении АЦП и времени преобразования. Например, для обеспечения среднего или высокого быстродействия следует выбрать АЦП последовательного приближения. Если одновременно требуется также высокое разрешение, то придется, по-видимому, применить АЦП, выполненный по гибридной технологии. При высоком разрешении, но низком быстродействии более подходящим будет двухтактный интегрирующий АЦП. Двухтактному интегрирующему АЦП следует отдать предпочтение и в тех случаях, когда нужно обеспечить высокую помехоустойчивость или ослабить наводки с частотой 60 Гц. Аналогично в системах дистанционного сбора данных лучше всего использовать АЦП на основе преобразования напряжения в частоту, тогда как в сверхбыстродействующих системах сбора данных вне конкуренции будет АЦП параллельного преобразования.
Другие факторы. Выяснив, какой тип АЦП нам нужем, мы должны затем выбрать среди АЦП данного типа устройство, удовлетворяющее всем другим нашим требованиям. Например, диапазон температур, в котором предполагается использовать АЦП, определяет эксплуатационный класс выбираемого устройства: должно ли оно относиться к классу коммерческих устройств (диапазон рабочих температур О... 70° С) или предназначается для промышленных (-25... +85°С) или военных (-55... +125 °С) применений. Нужно проверить также входной диапазон устройства, его совместимость с биполярными входными сигналами, форму представления выходных цифровых данных (последовательная или параллельная) и, если это необходимо, возможность реализации интерфейса с микропроцессорами.
5.4.2 Рекомендации по использованию АЦП
Соблюдение некоторых простых правил при использовании АЦП будет гарантией того, что мы получим от него наибольшую отдачу.
Используйте полный входной диапазон АЦП. Если входной сигнал изменяется только от 1 до 3,5В при использовании АЦП с входным диапазоном 0...5В, погрешность преобразователя фактически удваивается. Чтобы предотвратить это неоправданное ухудшение рабочих характеристик преобразователя, используйте предварительное масштабирование сигнала для обеспечения максимально возможного соответствия диапазона его изменения и входного диапазона АЦП.
Используйте хорошие источники опорного сигнала. Температурный и временной дрейфы опорного сигнала проявляются как погрешность усиления и поэтому должны удерживаться на минимальном уровне. Прецизионный интегральный источник опорного сигнала — хороший выбор для большинства применений.
Обращайте внимание на скорость изменения входного сигнала. Изменения входного сигнала в течение времени преобразования приводят к погрешности усиления в АЦП последовательного приближения. Если характер изменения входного сигнала непредсказуем, используйте УВХ. Модели УВХ общего назначения довольно дешевы. Используйте высококачественные полипропиленовые или полистирольные конденсаторы в качестве запоминающих конденсаторов в УВХ.
Применяйте отдельные общие провода для цифровых и аналоговых схем. Цифровые сигналы создают большие выбросы тока на общих проводах. Общие провода аналоговых и цифровых компонентов схемы должны быть отдельными и должны соединяться только в одной общей точке.
Добивайтесь минимизации помех и не забывайте о нагрузочных характеристиках схем. Стремитесь к уменьшению погрешностей входного аналогового сигнала, вызываемых земляными контурами, синфазными наводками и другими помехами, с помощью технических приемов, описанных в гл. 2. Вводите адекватное шунтирование (танталовый конденсатор емкостью 10мкф — для пульсаций и керамический конденсатор емкостью 10 или 100нФ — для импульсных помех) каждой ТТЛ ИС в цифровой части схемы. Не нагружайте управляющие линии более чем двумя ТТЛ БИС или используйте буферные схемы. Буферные схемы имеются на выходе большинства АЦП, но может потребоваться дополнительная буферизация, если выходные линии, по которым передаются данные, имеют достаточно большую длину или если к выходу АЦП подключено несколько других устройств.
(дополнительный материал: ЛР №4 ”ИИС на примере контроллера SSJKS4. Исследование работы АЦП”.)
5.5 Применение унифицирующих преобразователей.
Основное назначение унифицирующих преобразователей связано с приведением аналоговых измерительных сигналов к диапазону стандартных значений(например установленных ГОСТ 9895-78 и ГОСТ 26013-81). Применение унифицирующих элементов расширяет возможности использования ИИС, делает их более универсальными. В то же время выполнение некоторых операций унификации сигналов (в частности, масштабирование) связано с введением дополнительных погрешностей в конечный результат измерения и контроля.
Основные функции, выполняемые унифицирующими элементами, сводятся к линейным (установление нуля, температурная компенсация, масштабирование) и нелинейным (линеаризация) преобразованиям сигналов от измерительных цепей с датчиками, а также к уменьшению влияния на них помех.
Унифицирующие преобразователи могут быть индивидуальными, связанными с одним датчиком, и групповыми, работающими с несколькими измерительными цепями. Групповые унифицирующие элементы обычно используются в системах, имеющих коммутаторы сигналов измерительных цепей. При применении групповых унифицирующих элементов особенно важно, чтобы выполнялись условия правильного согласования их точностных и динамических характеристик с характеристиками коммутатора и других элементов измерительного тракта.
(см. также масштабные усилители, амплитудные ограничители, формирователи импульсных сигналов, триг. Шмитта…)
5.6 ЗАЩИТА ВХОДНЫХ ИЗМЕРИТЕЛЬНЫХ ЦЕПЕЙ ИИС ОТ ПОМЕХ, [Л.2, глава 2, с.61-84]
[Л.1, глава 7, с.121] , [Л.12, часть 1] /notebook1_2001_1.pdf/.
Под помехоустойчивостью ИИС понимается их способность противостоять вредному влиянию помех. Основные пути повышения помехоустойчивости ИИС связаны с улучшением защиты от помех аналоговых измерительных цепей систем и с уменьшением влияния помех на результат измерения, главным образом, путем соответствующей обработки измерительной информации в ИИС.
Учитывая, что помехоустойчивость ИИС в значительной степени определяется защитой от помех аналоговых входных измерительных цепей, далее в сжатом виде рассматриваются основные способы такой защиты.
5.6.1 Виды и источники помех
Помехи могут вызываться процессами, происходящими внутри ИИС, а также влиянием внешних источников помех. Причинами внутренних помех могут служить тепловые шумы в резисторах, термо-ЭДС, изменение сопротивления изоляции, перекрестные влияния измерительных цепей, связи измерительных цепей с цепями питания. К внутренним помехам могут быть также отнесены изменения напряжения источников питания, превышающие допустимые: не считается помехой только кратковременное (от 1 до 30 периодов частоты сети) понижение напряжения сети питания до 30% номинального, полный перерыв в питании может быть до 5 периодов частоты сети (100 мс). Кроме того, через сеть питания могут проникать импульсные высокочастотные возмущения (до 20 МГц) с повышенной амплитудой и длительностью до нескольких микросекунд.
Внешние атмосферные помехи возникают в результате разрядов молний, возникающих в большом количестве (до сотен разрядов в секунду) на Земле, а также от электризации частиц (пыли, снега и т. п.) в атмосфере Земли.
К другому виду внешних электрических помех относятся индустриальные помехи, создающиеся промышленными установками, радиостанциями, электрооборудованием автотранспорта и т. п.
Расположенные вблизи измерительных цепей электроэнергетические установки и силовая проводка питания являются основными источниками так называемых наведенных, или поперечных, помех. Эти помехи являются следствием воздействия внешних электромагнитных полей, а также реактивных связей измерительных цепей с источниками помех. В свою очередь такие факторы, как изменение сопротивления изоляции (например, от влияния повышенной температуры), появление разности потенциалов в разных точках заземления аналоговой измерительной цепи, тепловые шумы могут явиться источниками помех другого вида, которые носят название продольных.
Если параллельно измерительным проводам проходят силовые провода, то из-за наличия взаимной индуктивности ЭДС, наводимая на измерительных проводах, может быть найдена из выражения
Е = -Mdi/dt = -2·107 ln(a12a21 / a11a22) (di/dt),
где / — длина проводов; М — коэффициент взаимной индуктивности; I — ток в проводах; a — расстояние между проводами.
Нужно учитывать и емкостные связи между проводами. Так, при длине соединительных линий 30 м, погонной емкости 150-10~12 Ф/м и сопротивлении линии 100 Ом может быть получено напряжение помехи порядка 15,5-10-3 В при напряжении на силовых проводах 220 В.
По форме помехи любого происхождения разделяются на импульсные, флуктуационные и регулярные.
Импульсные помехи — это случайно появляющиеся импульсы (но обычно с интервалом не менее длительности импульса) произвольной формы.
Весьма широко используется разделение помех на аддитивные, независимые от полезного сигнала, и мультипликативные. Аддитивные помехи y(t) могут суммироваться с полезным сигналом x(t), а мультипликативные помехи служат множителем этого сигнала.
5.6.2 Основные способы защиты от помех
Для оценки эффективности защиты от помех далее используется коэффициент ослабления помех 20 log (п.вх/п.вых), дБ.
К общим мерам уменьшения влияния помех следует отнести использование вида модуляции сигналов, обеспечивающего нужную помехоустойчивость, и повышение уровня полезного сигнала. Рациональный выбор вида модуляции сигналов может быть сделан, если известен характер помех.
Для повышения уровня полезного сигнала используется переход к импульсной модуляции. Предполагается, что при переходе от AM- к АИМ-сигналу удается сокращением длительности импульса повысить его амплитуду. Предел такому повышению сигнала ставят тепловые, временные ограничения, а в некоторых случаях — электрическая прочность элементов измерительной цепи. При использовании импульсного питания измерительных цепей с тензорезисторами, закрепленными на поверхности металлической детали с достаточной теплоемкостью, удается повысить полезный сигнал более чем на порядок и ослабить влияние помех до 20 дБ. Нужно отметить, что длительность импульса, постоянные времени измерительной и тепловой цепей должны быть такими, чтобы за время измерения тепловой режим изменился незначительно.
Для уменьшения влияния продольных помех используется ряд мер. Одна из них — гальваническое разделение частей цепи, в которых имеются места заземления. Гальваническое разделение производится преимущественно с помощью трансформаторов и разделительных конденсаторов. Другая мера — симметрирование входной измерительной цепи.
Наконец, используются мостовые цепи, сбалансированные по напряжению продольной помехи, и компенсирующие трансформаторы. Имеются трансформаторы (фирма Philips), у которых индуктивность обмоток равна 400 Гн, а активное сопротивление — 240 Ом; в такой схеме происходит уменьшение продольной помехи 50 Гц примерно в 500 раз.
Защита измерительных цепей от внешних наведенных (поперечных) помех достигается рядом мер, к числу которых относятся уменьшение длины проводов за счет приближения к датчикам аналого-цифровых измерительных устройств, а также сближение и скрутка проводов, идущих к датчикам. При скрутке проводов ЭДС, наводимые в отдельных элементарных контурах, вычитаются, и благодаря этому удается уменьшить влияние поперечных помех на измерительные провода на несколько порядков.
Применяют также магнитное и электростатическое экранирование входных цепей от низкочастотных и высокочастотных магнитных полей. Экраны должны иметь замкнутую поверхность, охватывающую измерительную цепь и отдельно источники переменного тока. Части систем с разными потенциалами или имеющие гальванические развязки должны иметь свои экраны. Экранировка проводов может ослабить наведенные помехи 50 Гц до 30 дБ.
Компенсировать наведенные помехи можно путем организации специальных контуров. Типичные решения при этом связаны с трехпроводными схемами подключения датчиков (см. предыдущий параграф), применением компенсирующего трансформатора и др. При использовании параметрических датчиков можно изменять полярность питания измерительной цепи и брать среднее из суммы и разности полезного сигнала ис и помехи uti:[(uu + uc) +(Uu—"с)]/2.
При синусоидальной наведенной помехе возможно выполнение измерений в моменты, когда помеха принимает допустимо малый размер. При таком методе удается получить значительное ослабление помехи.
Для уменьшения внутренних помех целесообразно провода питания прокладывать и экранировать отдельно от измерительных проводов с низким уровнем полезного сигнала, коммутация сигналов высокого и низкого уровней должна проводиться отдельными коммутаторами. В необходимых случаях следует использовать специальные средства защиты от перерывов питания.
Должны быть продуманы места заземления измерительных цепей. Некоторые из таких мест определяются правилами электробезопасности или технологическими приемами монтажа элементов измерительной цепи (например, присоединением спая термопар к металлической поверхности). Некоторые точки заземления могут появиться в процессе измерительного эксперимента, например, из-за нарушения сопротивления изоляции, что может привести к организации контуров, вызывающих дополнительные погрешности. Такие контуры образуются, если заземлять экраны в нескольких точках. При проектировании системы рекомендуется составить и проанализировать схему заземления, а при наладке — уточнить ее.
Дальнейшее повышение помехоустойчивости может быть достигнуто обработкой суммы сигнала с помехой, имеющей случайный характер, в аналоговом или цифровом виде. Наиболее часто встречающиеся здесь виды обработки — это фильтрация и накопление сигналов, в течение которого происходит усреднение.
"6 - Поисковые геологические критерии" - тут тоже много полезного для Вас.
В интегрирующих аналого-цифровых преобразователях ослабление влияния помех может достигать 100 дБ.
Индивидуальные фильтры, как правило, просты (обычно однозвенные RС-фильтры). Их частотная характеристика выбирается, исходя из спектральных характеристик сигналов и помехи.
На практике при фильтрации и избирательном усилении удается ослабить помехи на 40 дБ, а при методе накопления—на 120 дБ.
При проектировании аналоговых измерительных цепей выбирается такой комплекс средств защиты, при котором действие помехи не превышает заданного уровня.
(дополнительный материал: ”Защита от помех датчиков и соединительных проводов систем промышленной автоматизации” см. в /notebook1_2001_1.pdf/.)




















