
Синтез адаптивной САУ
Лекция № 9. Синтез адаптивной САУ с эталонной моделью на основе нечеткой логики
Известно, что качество процессов управления при использовании ПИД - регуляторов существенно зависит от выбора его коэффициентов усиления  ,
,  и
и  для пропорциональной, интегральной и дифференциальной составляющей соответственно. Большинство инженеров на практике настраивают эти коэффициенты вручную, методом проб и ошибок. Эта процедура является достаточно сложной и требует опыта проектирования систем управления. С другой стороны, наличие такого опыта позволяет построить процедуру автоматической настройки коэффициентов усиления ПИД-регулятора на основе алгоритмов нечеткой логики. Ниже рассматривается один из возможных способов решения данной задачи.
для пропорциональной, интегральной и дифференциальной составляющей соответственно. Большинство инженеров на практике настраивают эти коэффициенты вручную, методом проб и ошибок. Эта процедура является достаточно сложной и требует опыта проектирования систем управления. С другой стороны, наличие такого опыта позволяет построить процедуру автоматической настройки коэффициентов усиления ПИД-регулятора на основе алгоритмов нечеткой логики. Ниже рассматривается один из возможных способов решения данной задачи.
Cтруктурная схема адаптивной системы управления с эталонной моделью имеет вид (рис. 3.9).
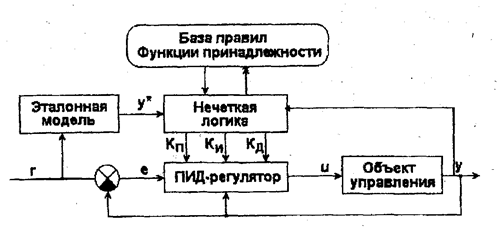
Рис. 3.9. Структурная схема нечеткой адаптивной САУ с ПИД-регулятором
Уравнение основного (ПИД-) регулятора определяется соотношением
 (3.5)
(3.5)
Наличие интегральной составляющей обеспечивает нулевую статическую ошибку САУ; выбором коэффициентов , , и обеспечиваются желаемые показатели качества переходных процессов. Будем учитывать 3 показателя динамики САУ:
- время  достижения 10 % от установившегося значения;
достижения 10 % от установившегося значения;
Рекомендуемые материалы
- время  нарастания, т.е. достижения 90 % от установившегося значения;
нарастания, т.е. достижения 90 % от установившегося значения;
- перерегулирование  .
.
Два из этих показателей  отмечены на рис. 3.10, где показан график переходной функции
отмечены на рис. 3.10, где показан график переходной функции  - реакции эталонной модели на ступенчатое изменение уставки
- реакции эталонной модели на ступенчатое изменение уставки  . Третий показатель
. Третий показатель  для переходного процесса, представленного на рис. 3.10, равен нулю, поскольку в качестве выбран монотонный переходной процесс.
для переходного процесса, представленного на рис. 3.10, равен нулю, поскольку в качестве выбран монотонный переходной процесс.
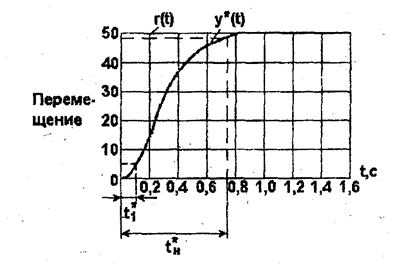
Рис. 3.10. Переходная функция эталонной модели
Будем полагать, что цель, поставленная перед нечетким регулятором, - обеспечить желаемые показатели качества системы  ,
,  ,
,  за счет подстройки параметров основного регулятора , , и . Для этого необходимо использовать правила, основанные на опыте и интуиции. При этом учитывается следующий опыт:
за счет подстройки параметров основного регулятора , , и . Для этого необходимо использовать правила, основанные на опыте и интуиции. При этом учитывается следующий опыт:
1) если коэффициент усиления увеличивается, то время нарастания уменьшается, а перерегулирование возрастает;
2) если коэффициент усиления увеличивается, то время нарастания сильно уменьшается, а перерегулирование возрастает;
3) если коэффициент усиления увеличивается, то время нарастания сохраняется, а перерегулирование слегка возрастает;
4) чтобы уменьшить время достижения 10 % от установившегося значения, необходимо уменьшить коэффициент усиления одновременно увеличить коэффициент усиления
Будем рассматривать в качестве входов HP отклонения  ,
,  ,
,  , а под выходами HP будем понимать настраиваемые значения коэффициентов усиления , и основного регулятора.
, а под выходами HP будем понимать настраиваемые значения коэффициентов усиления , и основного регулятора.
Базу правил HP, построенную на основе мнений экспертов, представим в виде таблицы 3.2.
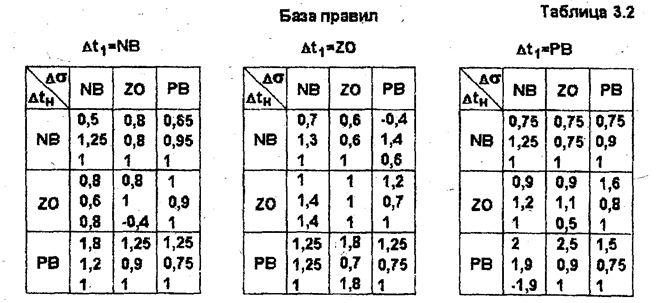
Здесь используются обозначения термов:
NB -"отрицательное большое" (negative big), ZO - "около нуля, оптимальное" (zero, optimal), PB - "большое отрицательное" (positive big).
Соответствующие этим термам функции принадлежности входных переменных HP (после нормирования диапазонов изменения указанных величин  ,
,  ,
,  ) показаны на рис. 3.11.
) показаны на рис. 3.11.
Поясним механизм составления таблицы 3.2. В каждой из клеток этой таблицы, составленной для различных значении переменной записаны значения поправочных коэффициентов  ,
,  ,
,  , определяющих требуемый закон изменения параметров ПИД-регулятора в зависимости от значений входных лингвистических переменных HP:
, определяющих требуемый закон изменения параметров ПИД-регулятора в зависимости от значений входных лингвистических переменных HP:
 ;
;  ;
;  . (3.6)
. (3.6)
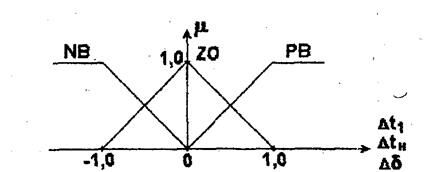
Рис. 3.11. Функции принадлежности
Примеры правил:
1° ,
,

 ,
,
т.е. в случае затянутого, слабо демпфированного переходного процесса  необходимо на 50 % увеличить коэффициент усиления
необходимо на 50 % увеличить коэффициент усиления  на 25 % снизить коэффициент усиления
на 25 % снизить коэффициент усиления  , сохраняя неизменным значение .
, сохраняя неизменным значение .
2° ,
,

 ,
,
т.е. при наличии слишком форсированного переходного процесса необходимо резко уменьшить значение , изменив даже его знак; несколько увеличить значение сохранив на том же уровне значение , и т. д.
Таким образом, измеренные значения отклонений , , (входы нечеткого регулятора) после их фаззификации с помощью приведенных на рис. 3.11 функций принадлежности подвергаются обработке с использованием записанных в табл. 3.2 правил вывода.
Если на данном этапе применить метод Произведения, а для дефаззификации воспользоваться методом Центра тяжести, то получаем следующие результирующие значения поправочных коэффициентов , , :


 (3.7)
(3.7)

Тройная сумма в каждом из выражений (3.7) учитывает тот факт, что любое из измеренных значений , , принадлежит двум соседним нечетким подмножествам. Число отличных от нуля слагаемых в тройной сумме, записанной в знаменателе (3.7), равно числу активизируемых правил вывода, а величина этой суммы равна сумме уровней активности данных правил (сравните с приведенными ранее предложениями (2.22), (3.4)).
После вычисления "четких" значений коэффициентов  ,
,  ,
,  необходимо подставить их в формулы (3.6), определяющие приращения искомых параметров (, , ) ПИД-регулятора.
необходимо подставить их в формулы (3.6), определяющие приращения искомых параметров (, , ) ПИД-регулятора.
Пример. Объект управления описывается дискретной передаточной функцией
 ,
,
11. Служебная переписка - лекция, которая пользуется популярностью у тех, кто читал эту лекцию.
где  ;
;  ;
;  ;
;  ; период дискретизации
; период дискретизации  .
.
На рис. 3.12 приведены результаты моделирования системы, осуществляющей управление перемещением данного объекта.
Пунктирными линиями здесь показаны выходы управляемого объекта до выполнения процессов самонастройки указанных выше коэффициентов усиления. Сплошные линии обозначают выходы эталонной модели и совпадающие с ними выходы объекта после выполнения 5 итераций процесса самонастройки. Приведенные на рис. 3.12 результаты моделирования соответствуют случаям самонастройки для предварительно выбранной медленной (а) и быстрой (б) переходной функции САУ.
Таким образом, использование нечеткого алгоритма адаптации обеспечивает хорошее совпадение переходных процессов на выходе САУ и ее эталонной модели, сохраняя такие традиционные преимущества ПИД-регуляторов, как их низкая чувствительность к параметрическим и сигнальным возмущениям
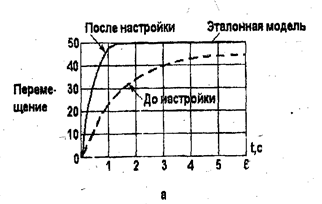
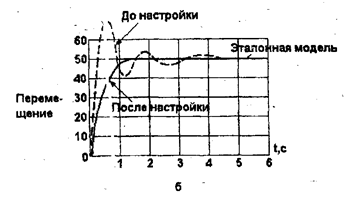
Рис. 3.12. Результаты моделирования адаптивной САУ




















