
Лекция 1. Электромеханические системы
Лекция 1. Электромеханические системы
Терминология, определения. Если исполнительными механизмами системы являются электромеханизмы, а система автоматически выполняет автономные режимы, связанные с работой одного или более механизмов, то такая система называется электромеханической. Класс электромеханических систем (ЭМС) достаточно широк, с их помощью решаются задачи автоматического управления, стабилизации или программного управления.
Как показывает практика, исполнительные механизмы и агрегаты ЭМС достигли своего совершенства. Так, например, системы стыковки космических аппаратов (КА) [1], [2] обеспечивают с помощью стыковочного узла жесткое соединение электрических и гидравлических разъёмов, а также герметичный стык между двумя КА. Такие ювелирные задачи по точной механике обеспечиваются конструкцией исполнительных механизмов и авионикой. Опыт отечественной и зарубежной космонавтики показал, что наибольшее распространение получил стыковочный узел типа «штырь-конус». На одном КА размещается активный стыковочный агрегат (АСА) типа «штырь», на другом – пассивный стыковочный агрегат (ПСА) типа «конус».
Стыковочный узел и его эволюция. Назначением стыковочного узла является соединение двух КА в единое целое и их расстыковка на монтажной орбите. Эту задачу выполняет стыковочный механизм (СтМ) АСА, защёлки головки которого механически соединяются с гнездом приёмного конуса ПСА. При этом усилие стягивания СтМ двух КА составляет порядка 1,5 т. При расстыковке агрегат АСА должен растолкнуть КА с требуемыми параметрами, при этом усилие обеспечивается пружиной СтМ, которая взводится при выдвижении штанги. Для обеспечения высокой надёжности расстыковки КА в состав СтМ были введены пироболты (ПБ) отстрела стыковочного механизма. В случае необходимости переход экипажа из одного КА в другой осуществляется по наружной поверхности космических аппаратов и требует наличия шлюзовых камер для выхода и входа космонавта. Для более комфортного перехода космонавта каждый из стыковочных агрегатов стал оснащаться крышкой переходного люка (ПЛ), которая открывается/закрывается, разгерметизируется/герметизируется вручную или автоматически. Эти операции усложнили режим стыковки за счет введения процедур освобождения защелок и втягивания штанги.
Наличие крышки ПЛ потребовало введения механизма герметизации стыка (МГС), который размещается на стыковочном шпангоуте каждого агрегата. При этом усилие стягивания двух КА возросло до 20 т. При расстыковке достаточно открыть крюки МГС, а рассталкивание КА обеспечивается толкателями, устанавливаемые по два на каждом стыковочном шпангоуте. На этом этапе введены ПБ открытия активных и пассивных крюков.
Если для первых КА достаточным была работа МГС одного агрегата АСА, то при увеличении масс стыкуемых КА и усложнении конфигурации станций потребовалась одновременная работа замком двух стыковочных агрегатов. В дальнейшем для обеспечения надежности было увеличено число замков, а в состав принадлежностей стыковочного агрегата были введены ручные зажимы для стяжки стыка. Кроме того, в СтМ были введены управляемые электромагнитные тормоза (ЭМТ), осуществляющие интенсивное демпфирование соударения стыковочных агрегатов.
С увеличением задач сборки количество агрегатов ПСА на станции возросло до шести. С учётом требований эксплуатации был увеличен просвет переходного люка.
Эволюция системы стыковки. Автоматическая система стыковки (АСС) проектировалась для беспилотных КА. Для проведения стыковки и расстыковки в ограниченной зоне радиовидимости в систему АСС был введен временной контроль выполнения каждого режима, который осуществлялся автономным программно-временным устройством (ПВУ). В нештатной ситуации (НШС) любой режим прерывался меткой ПВУ для проведения ана-
лиза отказа и принятия решения.
Рекомендуемые материалыГидравлический пресс 1.6 МН (для листовой штамповки) ЛР1 Отчет по лабораторной работе №1 "Построение модели изделия в PDM системе" -60% Ответы к РК №1 Отчет по учебной практике - ГОСТ 7.32-2017 Ответы к РК №1
Рисунок 1.1. Связь АСС с системами КА: РНС – радионавигационная система; СУД – система управления движением; СИО – система исполнительных органов; СБИ – система бортовых измерений; СУБА – система управления бортовой автоматикой; ПК – пульт космонавтов, КРЛ – командная радиолиния | АСС (см. рисунок 1.1) состоит из: · стыковочного агрегата, оснащенного контактными датчиками и механизмами на базе электроприводов с контактными устройствами; · блока управления (БУ); · программно-временного устройства (ПВУ); · бортовой кабельной сети (БКС). Для первых систем АСС блок БУ создавался один и обеспечивал управление приводами АСА и взаимное управление с другими системами КА. В дальнейшем создание систем АСС для различных КА потребовало модернизации авионики. С этой целью авионика была разбита на отдельные унифицированные субблоки: блок логики (БЛ) и блоки управления приводами (БУП). Наличие электроразъёмов стыка, которые автоматически соединяются в процессе стыковки для обеспечения эле- |

ктрической связи между КА, позволило ввести в алгоритм управления операции по оперативному включению резервных приводов ПСА и контролю операций режимов работы АСС. Однако, это привело к усложнению алгоритма.
С внедрением переходных люков в авионику введён новый блок, осуществляющий автоматические режимы открытия и закрытия переходных люков. Система стала называться системой стыковки с внутренним переходом (ССВП).
Таким образом, можно сформулировать следующие требования к авионике ЭМС:
1. Обеспечение максимальной надёжности посредством введения структурной и функциональной избыточности. Структурная избыточность создаётся за счет резервирования элементов автоматики, функциональная избыточность – введения нескольких контуров управления: автоматического, ручного и резервного.
2. Упрощение внутренней логики системы посредством введения автономных режимов всеми приводами агрегата, при помощи которых обеспечивается выход из НШС.
3. Выдача сигнальной информации на пульт космонавта (ПК) с целью контроля выполнения всех операций, инициируемых командами с ПК.
4. Выдача телеметрической информации, характеризующей состояние всех элементов и механизмов системы, изменяющих своё состояние или положение, с целью идентификации возможных неисправностей, определения путей устранения неисправностей и выработке соответствующих рекомендаций. К элементам системы, изменяющим своё положение или состояние, относятся датчики, механизмы и приводы СТА, формирователи команд и признаков, а также мостовые схемы блоков.
5. Разбиение авионики на ряд субблоков, каждый из которых выполняет вполне определённую функцию.
Такое построение авионики позволяет:
· более рационально организовать замену субблоков по мере выработки ими ресурса,
· при разработке новой системы максимально использовать результаты предыдущих разработок.
Структурная схема ЭМС. Система управления сложного объекта типа КА, самолёта, и др. (см. рисунок 1.2) представляет собой многоуровневую структуру, состоящую из центральной системы управления верхнего уровня (ЦСУ) и семейства ЭМС и др. систем. В общем случае в качестве ЭМС будем
|
Рисунок 1.2 – Структурная схема электромеханической системы | рассматривать систему, управляющую несколькими приводами и обеспечивающую определённое количество режимов работы агрегата. При простом объекте управления может использоваться только одна ЭМС с дополнительным пультом управления и отдельным источником питания. ЦСУ осуществляет включение фидеров питания ЭМС, выдачу команд управления, а также ведёт приём ответ- состояние системы и используемых ЦСУ в процессе управления. В состав ЭМС входят: авионика, электроприводы, датчики, кабельная сеть, а также другие электромеханические устройства (светильники, клапаны и др.). Приводы и датчики могут объединяться- |
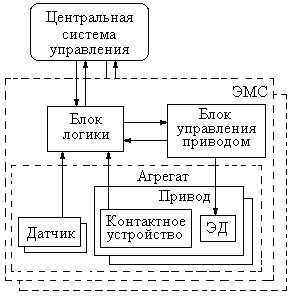
в один агрегат. Каждый привод включает в себя электродвигатель (ЭД) с редуктором и контактное устройство, состоящее из концевых выключателей.
Авионика обычно представляется блоком логики (БЛ), который обеспечивает выполнение алгоритма системы, и блоком управления приводом (БУП), который коммутирует электродвигатель и обеспечивает алгоритм его автономной работы. Блоки электрически связаны между собой. В свою очередь авионика предъявляет требования к выбору датчиков, электродвигателей и др.
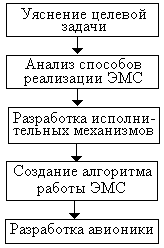
Каждая конкретная ЭМС в зависимости от назначения реализует свои алгоритмы работы, поэтому ниже рассматривается только общие положения алгоритма разработки системы. Алгоритм разработки ЭМС (см. рисунок 1.3) заключается в последовательном выполнении определённых процедур.
Первоначально алгоритм работы ЭМС разрабатывает конструктор исполнительных механизмов системы. Далее разработчик авионики после изучения алгоритмов работы, выбора современной элементной базы приступает к проектированию авионики c целью достижения поставленных задач управления. В блоках БУ реализуются процедуры алгоритма, дополнительно вводятся команды взаимного управления, решаются проблемы резервирования, а также вводится постоянный контроль состояния аппаратуры. В итоге авионика обеспечивает автоматизацию процесса управления системы и в случае возникновения НШС, выдаёт статусные сообщения, по которым ЦСУ выключает систему. Таким образом, потребительские качества ЭМС возрастают за счёт дополнительных сервисных функций алгоритма управления. Возникает актуальная задача разработки оптимальных алгоритмов с учётом самоконтроля и высокой живучести в жестких условиях эксплуатации.
В общем случае алгоритм функционирования ЭМС должен реализовыватьследующие требования:
|
Рисунок 1.3 – Алгоритм разработки ЭМС | · система должна иметь резервные датчики и приводы для безусловного выполнения своих функций; · система должна выполнять несколько режимов; · каждый режим состоит из нескольких последовательных операций; · каждая операция контролируется ПВУ, временная метка которого превышает максимальное время выполнения операции в худших условиях эксплуатации системы; · при невыполнении операции режим прекращается. Российская космонавтика показывает, что техника стыковки на орбите получила мировое признание. Если в 1975 году в рамках проекта ЭПАС каждая страна СССР и США сконструировали и изготовили собственные системы стыковки, то в 90-х годах прошлого века |
для совместного полёта орбитальной станции «Мир» и американских шаттлов, последние оснащались российскими системами стыковки. В дальнейшем для нужд международной космической станции МКС все стыковки осуществляются с помощью отечественных систем стыковки. Деловые американцы покупают нашу технику, понимая, что им самим делать это будет дороже, а качество и надёжность российских систем подтверждается их систематической эксплуатацией. Российские разработчики ездят на подготовку к каждому полёту на полигон во Флориду и в Хъюстонский ЦУП на поддержку полётов.
Успехи отечественной системы стыковки должны вызывать гордость россиян и, особенно, студентов МГУЛ, которым возможно придётся трудиться в крупных КБ и на промышленных производствах нашей страны и г. Королёва.
Аннотация дисциплины Автоматизация проектирования систем и средств управления (АПССУ). В связи с развитием ЭМС остро встаёт задача разработки авионики на современной элементной базе. На рынке микроэлектроники появились программируемые логические интегральные схемы (ПЛИС), которые имеют достаточно большие возможности переработки цифровой информации в малых габаритах, что делает их незаменимыми в электромеханических системах. По сути дела микросхема (МС) состоит из комплекта логических ячеек (типа И, ИЛИ, НЕ, триггер и т.д.), на которых каждый пользователь реализует свою конкретную авионику. В процессе проектирования с помощью специальных САПР автоматически создаётся структура файла конфигурации. Успешная разработка аппаратуры цифровой обработки сигналов на ПЛИС [3] требует знания современной элементной базы и основных методов их проектирования. Всем этим вопросам посвящены 1-ая и 2-ая лекции.
С 3-ей по 13-ую лекции изучаются архитектура, типы и характеристики ПЛИС фирмы Xilinx, а также основные режимы её работы, возможности программирования ПЛИС с помощью САПР Foundation Series 2.1i.
В лекциях №13-№17 рассматривается САПР фирмы Altera, этапы проектирования. Приводится состав программного обеспечения, его приложения, порядок создания проекта.
Заканчивая рассмотрение объёма настоящего курса, хочется остановиться ещё на одной проблеме. Если в ХYIII и XIX веках человеку, получившему высшее образование, профессиональных знаний хватало на всю творческую жизнь, то начиная со второй половины ХХ века, обновление технических знаний уже должно происходить постоянно. За этот период на памяти только одного поколения изобретены телевизор, вычислительные машины, включая персональный компьютер, космические корабли, которые бороздят Вселенную, и произошло ещё много нового в науке и технике. Поэтому студентам необходимо учиться систематическому обновлению своих знаний. Без этого Вы не станете современным инженером!
В этом семестре необходимо выполнить две лабораторные работы: таймер системы управления и устройство опроса дискретных датчиков с формированием последовательного кода. Изучение курса заканчивается экзаменом.
Вопросы для закрепления материала
1. Класс электромеханических систем (ЭМС).
2. Стыковочное устройство, его состав и эволюция.
3. Система стыковки, её состав и эволюция.
4. Структурная схема системы ЭМС.
5. Состав электропривода ЭМС.
6. Основные положения алгоритма функционирования ЭМС.
7. Алгоритм разработки электромеханической системы.
8. Состав авионики ЭМС, назначение блоков управления.
Рекомендация для Вас - 2. Восприятие в процессе общения.
9. Функции программно-временного устройства ЭМС.
10. Функции центральной системы управления сложных объектов.
Литература
1. Сыромятников В.С. 100 рассказов о стыковке и о других приключениях в космосе и на Земле. Часть 1: 20 лет назад. –М.: Лотос, 2003. –568 с.: ил.
2. Сыромятников В.С. Стыковочные устройства космических аппаратов. – М.: Машиностроение, 1984. –214 с., ил.
3. Мальцев П.П., Гарбузов Н.И., Шарапов А.П., Кнышев Д.А. Программируемые логические ИМС на КМОП-структурах и их применение.1998. –М.: Энергоатомиздат, -159 с.


















