Курсовая работа: Трёхкоординатный микроманипулятор
Описание
РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту «Основы проектирования систем автоматического управления оборудования электронных технологий»
на тему:
«Трёх координатный микроманипулятор»
Москва 2007г.
Оглавление.Оглавление. 2
Техническое задание. 3
Реферат. 4
Введение. Описание интерфейсов устройства. 5
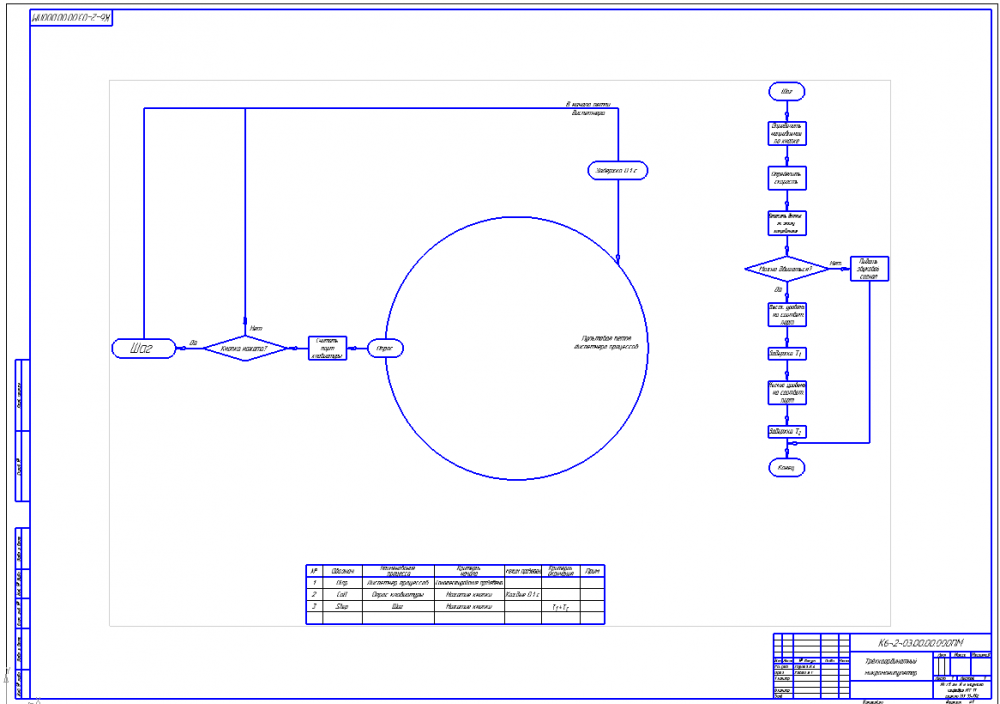
Описание процессной модели. 6
Управление микроманипулятором. 8
Комплексная принципиальная схема. 9
Техническое задание на элементы и узлы САУ.. 10
Расчёт проектируемых компонентов САУ.. 22
Заключение. 26
ЗАДАНИЕ
на курсовой проект по системам автоматического управления оборудования электронных технологий.
Тема проекта:« Трёх координатный микроманипулятор»
2. Разработать комплексную принципиальную схему, как совокупность системы целевых механизмов, системы их энергообеспечения и системы управления, связанных материальными, энергетическими и информационными потоками.
3. Описать механический, энергетический и информационный интерфейс компонентов машины. Дать техническое задание и техническое предложение на САУ и основные элементы машины.4. Разработать принципиальную электрическую схему элемента САУ или САУ в целом.
Содержание графической части.
1. Процессная модель машины..................................................1 л.
2. Комплексная принципиальная схема....................................2 л.
3. Принципиальная электрическая схема..................................1 л.
1.Введение. Описание целевого, механического и энергетического интерфейса спроектированной технологической машины.
2.Описание процессной модели. Выбор и обоснование целевых, сервисных функций, и функций коррекции цели.
3.Техническое задание и техническое предложение на систему управления машины по приведенной в Приложении 1 форме.
4. Описание комплексной принципиальной схемы ФС. Обоснование структурно-компоновочного решения, выбор и согласование уровней потоков элементов.
5. Документы, сопровождающие комплексную принципиальную схему:
-перечень элементов ПЭ;
-перечень потоков и сигналов ПС;
-технические задания на основные подсистемы и узлы машины ТЗ.
6. Информационный поиск датчиков и исполнительных элементов машины и ее САУ, описание целевого, механического, энергетического и информационного интерфейса этих элементов ОЭ.
7. Расчет и описание принципиальной электрической схемы.
8. Заключение.
Графические работы в объеме 5 листов выполнены на ПК с помощью программы АСКОН КОМПАС v.7Plus. Записка выполнена с использованием программного продукта Microsoft Word.
Целью данного курсового проекта является овладение навыками, методами и средствами комплексных разработок механических и электронных компонентов оборудования САУ, а также правилами и методами составления технического задания на программное обеспечение САУ.
Задачи проекта состоят в:
-распределении функций машины между различными компонентами и обоснование этих функций;
-постановке четких технических заданий перед разработчиками отдельных компонентов;
-выполнении технической документации на электронные компоненты.
В проекте разработана система управления вакуумной установкой нанесения титанового покрытия.
Курсовой проект выполнен в следующем объеме: процессная модель (алгоритм работы системы управления установкой); комплексная принципиальная схема (КПС) установки, включающая разработку КПС механической части и КПС систем пневмоавтоматики, энергообеспечения и управления; схема соединений элементов установки; экран монитора персонального компьютера. В расчетно-пояснительной записке приведены необходимые пояснения и отражены принципы построения САУ установки, даны расчеты и описания.
Введение. Описание интерфейсов устройства.Целью данного курсового проекта является разработка системы автоматизированного управления трёхкоординатным микроманипулятором. Необходимо автоматизировать процесс перемещения по координатам.
Устройство является экспериментальным стендом по точному совмещению чипов различных МЭМС-изделий. Общий вид представлен рис.1.
Рис.1
Устройство состоит из основания 2, вращающейся платформы 5, упругой направляющей 3, ходового винта 4, шагового двигателя 1. Шаговые двигатели обеспечивают перемещение спутника 6 с изделием по трём координатам: горизонтальная, вертикальная и угол поворота. После достижения требуемой точности совмещения имеется возможность зафиксировать спутники в конечном положении и извлечь их из манипулятора. В упругих направляющих сформирована резьба. Вал передаёт движение от шагового двигателя ходовой части направляющей. Ходовая часть соединена с неподвижной упругой системой, которая призвана выбирать зазор в резьбе. Аналогичным образом передаётся движение поворотному основанию.Техническая характеристика установки.
Пределы перемещений
·по горизонтали и вертикали ±2 мм
·по углу поворота ±3°
Шаг 1,5 мкм.
Целевой интерфейс.
Устройство предназначено для совмещения чипов изделий микромеханики.
Механический интерфейс.
Габаритные размеры устройства – 110х160х50. Масса установки – 2 кг. Устройство может быть размещено на любой горизонтальной поверхности. Имеется требование по отсутствию вибраций.
Энергетический интерфейс.
Питание устройства производится от сети с напряжением 220 В и частотой 50 Гц. Мощность, потребляемая устройством – 100 Вт.
Информационный интерфейс.
Информационная часть устройства включает контроллер управления шаговыми двигателями, цифровую камеру и любой современный ПК для отображения изображения с камеры..
Контроллер предназначен для обработки поступающей информации и выдачи управляющих воздействий для реализации всех возложенных на САУ функций.
Персональный компьютер предназначен для отображения картинки, поступающей с камеры по протоколу USB 2.0, записи фотографий.
Характеристики курсовой работы
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСписок файлов

Начать зарабатывать
 zzyxel
zzyxel



















