Другое 73: 73Б - Проектирование и исследование механизма управления летательного аппарата с уголковым соплом вариант Б
-61%
Описание
Техническое задание №73 (б)
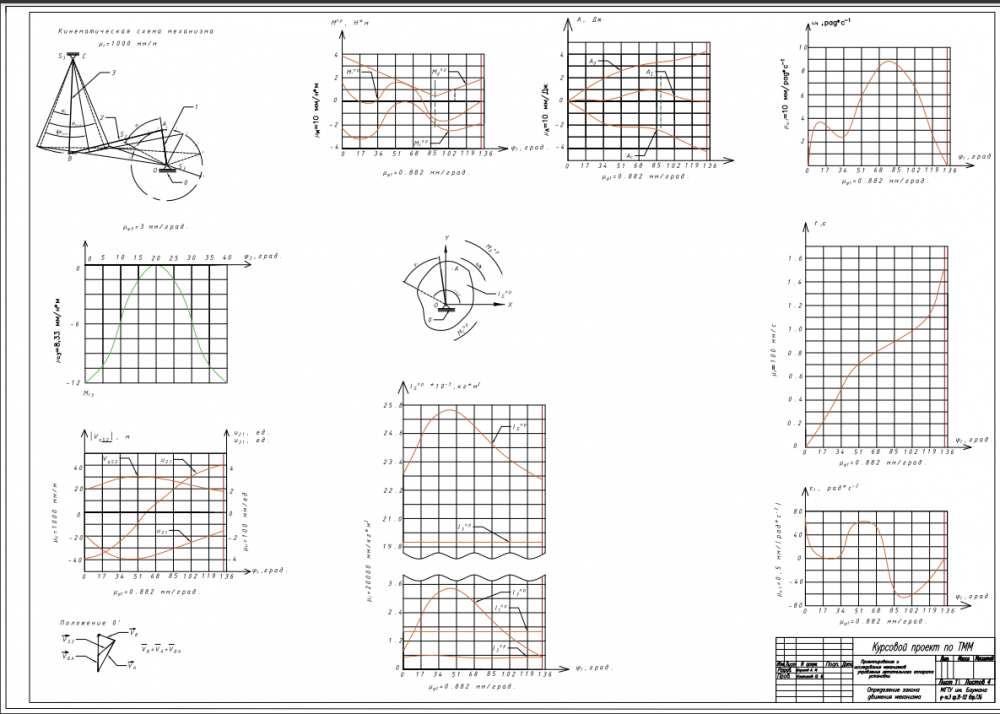
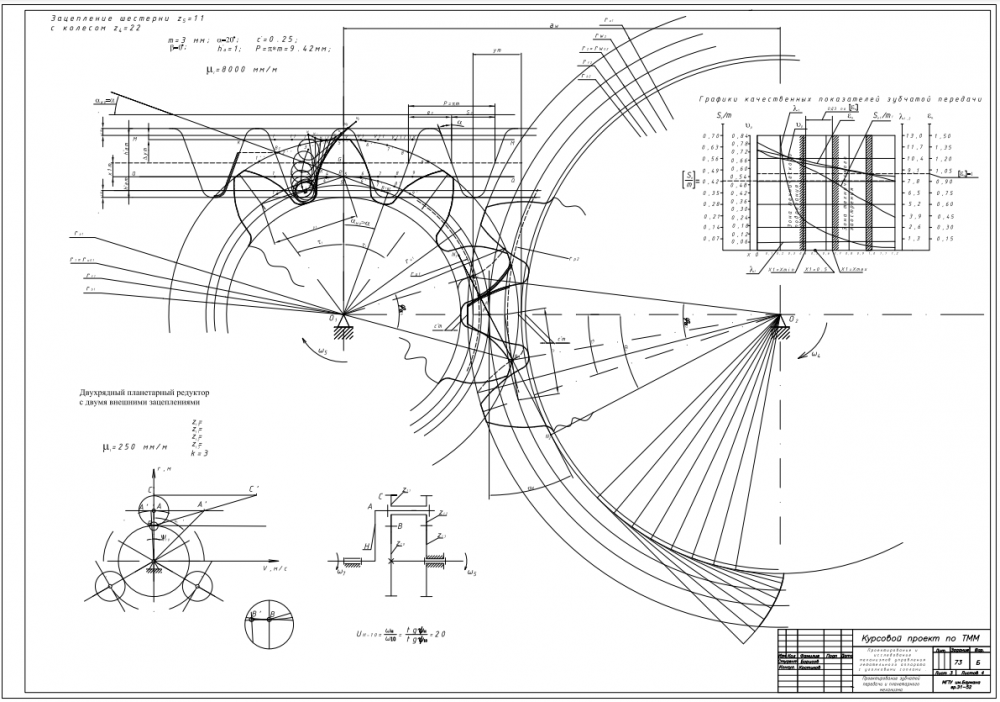
Проектирование и исследование механизмов управления летательного аппарата с угловыми соплами. Корректировка траектории полета летательного аппарата производится за счет изменения направления потока газов, выходящих их уголковых сопел. Схема расположения уголковых сопел и их привод представлены на рис. 73а. Поворот подвижной части 3 уголкового сопла относительно неподвижной его части осуществляется с помощью механизмов управления. Направление поворота и величина угла поворота каждого из уголковых сопел могут быть различными, благодаря чему траектория полета может значительно меняться. При необходимости изменения траектории полета соответствующий сигнал подается от автомата управления 9 на источник питания 8 (специальные батареи с устройством переключения полярности) электродвигателя 7. В зависимости от включения источника питания вал электродвигателя начинает вращаться в ту или иную сторону. Движение от электродвигателя 7 через планетарный редуктор 6 (схема редуктора изображена на рис. 73 в) и зубчатые колеса 5, 4 передается валу 0, на котором закреплено звено 1 стержневого механизма ОАВС. Звено 1, поворачиваясь на некоторый угол вокруг оси 0, передает движение через шатун 2 коромыслу 3, которое жестко связано с подвижной частью уголкового сопла. Начальное положение I уголкового сопла характеризуется отклонением звена 3 от нейтрального (вертикального) положения на угол 20˚ (рис. 73 б).
![]()
![]()
![]()
![]()
![]()
![]()
Проектирование и исследование механизмов управления летательного аппарата с угловыми соплами. Корректировка траектории полета летательного аппарата производится за счет изменения направления потока газов, выходящих их уголковых сопел. Схема расположения уголковых сопел и их привод представлены на рис. 73а. Поворот подвижной части 3 уголкового сопла относительно неподвижной его части осуществляется с помощью механизмов управления. Направление поворота и величина угла поворота каждого из уголковых сопел могут быть различными, благодаря чему траектория полета может значительно меняться. При необходимости изменения траектории полета соответствующий сигнал подается от автомата управления 9 на источник питания 8 (специальные батареи с устройством переключения полярности) электродвигателя 7. В зависимости от включения источника питания вал электродвигателя начинает вращаться в ту или иную сторону. Движение от электродвигателя 7 через планетарный редуктор 6 (схема редуктора изображена на рис. 73 в) и зубчатые колеса 5, 4 передается валу 0, на котором закреплено звено 1 стержневого механизма ОАВС. Звено 1, поворачиваясь на некоторый угол вокруг оси 0, передает движение через шатун 2 коромыслу 3, которое жестко связано с подвижной частью уголкового сопла. Начальное положение I уголкового сопла характеризуется отклонением звена 3 от нейтрального (вертикального) положения на угол 20˚ (рис. 73 б).




Файлы условия, демо
Характеристики учебной работы
Тип
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Номер задания
Вариант
Просмотров
288
Размер
1,24 Mb
Список файлов
Курсовой проект вариант 73Б
1.PNG
ЛИст 2.pdf
Лист 1.pdf
Лист 3.pdf
Лист 4.pdf
РПЗ.pdf

Друзья, спасибо за доверие! Если вам понравилась работа – поставьте 5⭐ и напишите отзыв. Это поможет другим студентам, а мне даст силы делать ещё больше качественных материалов для вас 🔥
 anhyeuem
anhyeuemКомментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!
Отзывы на другие работы автора
Отзыв
ДМ1519 - Проектирование привода цепного транспортера с двухступенчатым цилиндрическим редуктором выполненным по развернутой схеме
Есть недочёты, хорошо подходит как база для выполнения аналогичного варианта курсача

Отзыв
Сборочная размерная цепь + Подетальная размерная цепь
Были замечания, но автор все быстро исправил, теперь все отлично.

Отзыв
Плоская и пространственная статика
Есть небольшая путаница с углами из условий, которая может влиять на численный ответ, и подобные мелкие ошибки, в остальном всё хорошо

Отзыв
Кратные и криволинейные интегралы
есть ошибка в 5 номере и преподаватели уже начинают палить что эта работа списана

Отзыв
Отчет по производственной практике - Композиционные материалы - Предприятие НИИ СМ МГТУ им. Н.Э. Баумана
Спасибо! Изложение краткое и конструктивное, лишней информации нет. Помогло при составлении отчета