Ответы к экзамену: Теория к экзамену
Описание
Теория к экзамену
- 1. Звенья и кинематические пары в механизмах (на примере любого механизма); используемые допущения. Число подвижностей, число наложенных связей, виды соприкосновения звеньев в кинематических парах (КП). Классификация кинематических пар по числу подвижностей (примеры).
- 2. Изобразите цилиндрическую кинематическую пару и пару "цилиндр на плоскости"; укажите, сколько подвижностей имеет каждая из них, какие наложены связи, каков характер соприкосновения звеньев?
- 9. Аналоги (передаточные функции) скоростей и ускорений, составьте формулы для определения скоростей и ускорений через заданные аналоги.
- 10. Классификация сил, действующих в машинах; механические характеристики различных машин.
- 11. Приведение сил. Напишите исходное уравнение и составьте систему уравнений для определения суммарного приведенного момента ΜΣпр (на примере нагружения кривошипно-ползунного механизма).
- 12. Приведение масс. Напишите исходное уравнение и составьте систему уравнений для определения суммарного приведенного момента инерции IпрΣ (на примере кривошипно-ползунного механизма).
- 13. Динамическая модель механизма, ее свойства и параметры; составьте уравнение движения механизма в энергетической и дифференциальной форме; режимы движения механизма.
- 14. Изобразите график ω1(t) при установившемся движении; назовите условия его поддержания; укажите кинематические параметры, характеризующие установившееся движение.
- 15. Составьте уравнение для определения по заданному коэффициенту неравномерности [δ] приведенного момента инерции JI пр, необходимого для ограничения периодических колебаний скорости главного вала машин.
- 17. Постройте для установившегося режима график ТI(ϕ1), задавшись графиками АΣ (ϕ1), Тп(ϕ1) , и величиной Тнач.; укажите величину ΔΤI НБ.
- 18. Определение (приближенное) изменения угловой скорости Δω1(ϕ1) при установившемся движении по заданному графику изменения кинетической энергии ΔΤI(ϕ1).
- 19. Определение угловой скорости ω1(ϕ1) в переходном процессе, если заданы графики МΣпр (ϕ1) , JΣпр(ϕ1) и начальные условия : при t = 0 имеем ϕ1=ϕ1нач, ω1=0.
- 20. Постройте график ϕ1(t) закона движения механизма, в переходном процессе, если задан график ω1(ϕ1 ) (при t = 0 имеем ϕ1 =0) .
- 21.Определение углового ускорения ε1 начального звена механизма из его уравнения движения или графически ( по заданному графику ω1(ϕ1)).
- 22. Определение угловой скорости ω1(t) в установившемся режиме, если заданы JΣпр=const, МДпр =А-Вω1, Мспр=МАcos(ωсрt)+Мср .
- 23. Определение угловой скорости ω1(t) в процессе разгона машины, если заданы: JΣпр = const , МДпр = МД0пр -βω1, Мспр= const (при t=0 имеем ω1=0).
- 24. Действие реакций в кинематических парах плоского механизма (поступательной, вращательной, высшей), если не учитывать трения.
- 25. Действие реакций в кинематических парах плоского механизма (поступательной, вращательной высшей) при учете трения.
- 26. На примере простейшей (двухповодковой) группы Ассура, содержащей только низшие пары , покажите , что группа Ассура статически определима, а отдельно взятое звено группы - статически неопределимо.
- 27. Определение сил инерции ползуна и шатуна в кривошипно-ползунном механизме. (проверить)
- 28. Методика силового расчета кривошипно-ползунного механизма без учета трения (составить необходимые уравнения сил и моментов).
- 29. Основная теорема зацепления.
- Формулировка анализа. Контактная нормаль к профилям высшей пары пересекает линию центров в полюсе относительного вращения звеньев
- 30. Скольжение профилей в процессе их зацепления; составьте формулу для определения скорости скольжения.
- 31. Эвольвента, ее свойства и ее уравнение.
- 32. Изобразите схему образования боковой поверхности прямого и косого зубьев цилиндрического колеса.
- 33. Эвольвентное прямозубое колесо, его элементы составьте расчетные формулы для определения радиусов делительной, основной и произвольной окружностей, шагов по этим окружностям и углового шага колеса.
- 34. Эвольвентное внешнее зацепление, его элементы и свойства. (проверить рисунок)
- В зубчатой передаче контактирующие элементы двух профилей выполняются по эвольвентам окружности и образуют, так называемое эвольвентное зацепление.
- 35. Реечное станочное зацепление, его элементы, смещение исходного производящего контура; составьте расчетные формулы для определения ra, h, s.
- 36. Подрезание зубьев, его причины; составьте расчетные формулы для определения zmin и xmin.
- 37. Составьте расчетную формулу для определения толщины зуба sу по окружности произвольного радиуса; напишите расчетную формулу для толщины зуба sa на окружности вершин; заострение зуба.
- 38. Составьте расчетную формулу для определения αw- угла зацепления.
- 39. Составьте расчетные формулы для определения аw межосевого расстояния, и у - коэффициента воспринимаемого смещения. (не обязательно)
- 40. Составьте расчетную формулу для определения Δу- коэффициента уравнительного смещения.
- 41. Коэффициент перекрытия в прямозубой передаче; составьте расчетную формулу для определения коэффициента перекрытия εα
- 42. Изобразите расчетную схему для составления формулы коэффициента осевого перекрытия εβ косозубой передачи; поясните влияние угла наклона β на значение коэффициента перекрытия; напишите расчетную формулу для коэффициента полного перекрытия εγ.
- 43. Ряды зубчатых колес; передаточное отношение многоступенчатого зубчатого механизма.
- 44. Изобразите схему планетарного зубчатого зацепления и составьте для него формулу Виллиса (соотношение между угловыми скоростями и радиусами начальных окружностей).
- 45. Выполните кинематическое исследование двухрядного планетарного механизма графическим методом.
- 46. Выполните кинематическое исследование двухрядного планетарного механизма аналитическим методом.
- 47. Составьте уравнение соосности и условие соседства для однорядного многосателлитного планетарного механизма.
- 48. Составьте уравнение сборки для однорядного многосателлитного планетарного редуктора.
- 49. Изобразите схему кулачкового механизма с прямолинейно движущимся роликовым толкателем, поясняющую влияние угла давления на реакции в кинематических парах; каково влияние угла давления на работоспособность механизма?
- 50. Составьте расчетное уравнение для определения угла давления; как он влияет на размеры кулачкового механизма?
- 51. Изобразите графики перемещения, скорости (или аналога скорости) и ускорения (или аналога ускорения), характеризующие движение толкателя в кулачковом механизме.
- 52. Изложите метод определения свободных размеров ( r0, e ) кулачкового механизма с прямолинейно движущимся роликовым толкателем по заданному значению [V], задавшись графиком Vqтолк = ƒ(sтолк). (не обязательно)
- 53. Изложите метод определения свободных размеров (r0, aw) кулачкового механизма с коромысловым роликовым толкателем по заданному значению[V], задавшись графиком Vqтолк = ƒ(sтолк). (не обязательно)
- 54. По заданному закону движения Sтол=ƒ(ϕкул) прямолинейно движущегося роликового толкателя и по заданным свободным размерам (r0, е) графически определите координаты центрового профиля кулачка (используйте метод обращения движения кулачка и стойки); постройте конструктивный профиль кулачка.
- 55. По заданному закону движения Sтол=ƒ(ϕкул) коромыслового роликового толкателя, по заданным свободным размерам (r0, aw) и длине толкателя графически определите координаты центрового профиля кулачка (используйте метод обращения движения кулачка и стойки); постройте конструктивный профиль кулачка.
- 56. Какой ротор (вращающееся звено) называется неуравновешенным? Какой величиной выражается мера неуравновешенности? Дайте характеристику статической, моментной и динамической неуравновешенности ротора. Каковы причины неуравновешенности ротора? Понятие о балансировке изготовленных роторов.
- 57. Изложите метод динамического уравновешивания ротора при проектировании.
- 58. Виброизоляция: схема механической системы, действующие силы уравнение движения, коэффициент виброизоляции, влияние жесткости и вязкости виброизолятора.
- 59. Виброзащита машин методом динамического гашения колебаний.
- 60. Коническая зубчатая передача; основное векторное уравнение угловых скоростей, определение углов при вершинах начальных (аксойдных) конусов.
- 61. Коническое зубчатое колесо, его элементы и основные размеры.
- 62. Изложите метод дополнительных конусов для геометрического расчета конической зубчатой передачи.
- Ширина зубчатого венца , где b=0.3....0.4 - коэффициент ширины зубчатого венца.
- 63. Станочное зацепление при изготовлении конических колес, его элементы определение основных размеров.
- 64. Волновая зубчатая передача, ее устройство и кинематика.
- 65. Механизмы с прерывистым движением (мальтийские и др.), их особенности, устройство и расчет.
- 66. КПД механизма и системы механизмов, соединенных последовательно и параллельно.
- 67. Манипуляторы, их технические характеристики; составьте кинематическую схему манипулятора с четырьмя степенями свободы.
- 68. Проектирование кулисного механизма по заданным условиям: размер стойки l, коэффициент обратного хода ползуна κν и длина его хода Н.
- 69. Метод определения противовесов (корректирующих масс) для частичного статического уравновешивания кривошипно-ползунного механизма.
- 70. Метод определения противовесов (корректирующих масс) для частичного статического уравновешивания шарнирного четырехзвенника.
- 71. Силовой расчет механизмов – постановка задачи силового расчета, определение числа неизвестных, особенности статического силового расчета.
- 72. Плоский кулачковый механизм - области применения, основные преимущества и недостатки. Угол давления и заклинивание в кулачковых механизмах.
- 73. Синтез типовых планетарных механизмов - условия, которые необходимо выполнить при подборе чисел зубьев.
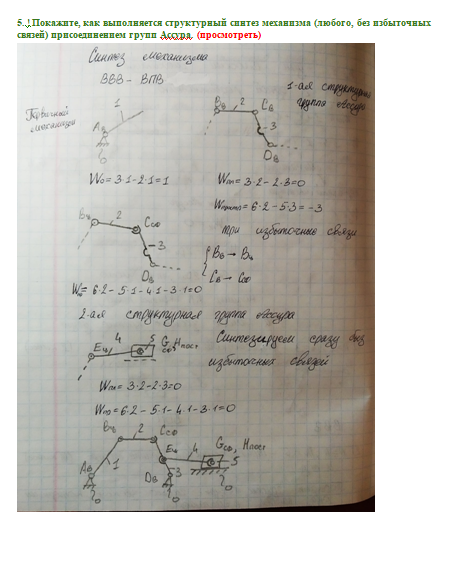
- 74. Типовые механизмы с высшими парами - структурные схемы, основные преимущества и недостатки, области применения. Методы повышения нагрузочной способности при проектировании.
- 75. Режим работы машинного агрегата "пуск-останов". Управление конечным положением объекта - жесткий и мягкий удары при останове, безударный останов, удержание объекта в конечном состоянии (кинематические и энергетические условия)?
- 76. Изобразите схему планетарного зубчатого зацепления и составьте для него формулу Виллиса (соотношение между угловыми скоростями и радиусами начальных окружностей).
- 77. Динамика одноподвижного машинного агрегата - уравнения движения механической системы и ее динамической модели в энергетической форме.
- 78. Определение линейных и угловых координат точек и звеньев плоского механизма аналитическим методом (на примере шарнирного четырехзвенника).
- 79. Определение сил инерции звеньев в шарнирном четырехзвеннике.
- 80. Алгоритм расчета быстродействия машинного агрегата при режиме работы "пуск-останов".
Образец ![]()

Характеристики ответов (шпаргалок) к экзамену
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Просмотров
754
Качество
Файлы различного качества
Размер
73,44 Mb
Список файлов
Теория к экзамену - ТММ.docx
Вам все понравилось? Получите кэшбэк - 40 рублей на Ваш счёт при покупке. Поставьте оценку и напишите положительный комментарий к купленному файлу. После Вы получите деньги на ваш счет.
10 февраля 2021 в 18:17
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!
Отзывы на другие работы автора
Отзыв
Выбор материала и технологии термической обработки
Прекрасный файл, все сделано по требованиям сайта кафедры "Материаловедения" , дз зачли без всяких нареканий! Придраться не к чему! 5 из 5 баллов!

Отзыв
Статически неопределимые задачи изгиба
У букеткина не было вопросов по ответам, только по оформлению, но это моя вина. А так супер
Отзыв
Задача 10-12
Хорошо решена задача, только главное не запутаться в коэффициентах в расчете параллельных труб
Отзыв
Проектирование и исследование механизмов четырехтактного двигателя внутреннего сгорания
Норм некоторые листы. Но для того, чтобы собрать полностью правильный курсач пришлось покупать 3-4 курсача от разных авторов
Отзыв
Клапан перепускной
Хорошие чертежи) Немного не сошлись размеры, но самое главное очень помогли разобраться с деталями!! все выносные чертежи также приняли)) шпиндель у меня уже был утерян, так что только благодаря чертежу смогла сборку сделать)

Спасибо за отзыв❤️


















