Курсовая работа: Математическое моделирование замкнутой по сигналу наблюдателя состояния электромеханической системы ШИП ДПТ НВ
Описание
Перечень требований к основному содержанию ИДЗ
1. Настроить математическую модель замкнутой электромеханической системы «ШИП-ДПТ НВ» с электродвигателем, приведённым в техническом задании.
2. Настроить и провести сравнительный анализ динамики наблюдателя состояния полного порядка с П- и ПИ-принципами отработки невязки. Примечание: синтез и анализ провести в непрерывном времени.
3. Настроить и провести сравнительный анализ динамики электромеханической системы «ШИП-ДПТ НВ», замкнутой по сигналам от датчика угловой скорости и от наблюдателя состояния. Примечание: синтез и анализ провести в непрерывном времени.
4. Настроить и провести сравнительный анализ динамики не менее двух дискретных вариантов наблюдателя.
5. Настроить и провести сравнительный анализ динамики микропроцессорной электромеханической системы «ШИП-ДПТ НВ», замкнутой по сигналам от датчика угловой скорости и от наблюдателя состояния. Примечание: синтез и анализ провести в дискретном времени.
Оглавление
Список сокращений...........................................................................................................5
Введение .............................................................................................................................6
1 Общие сведения..............................................................................................................8
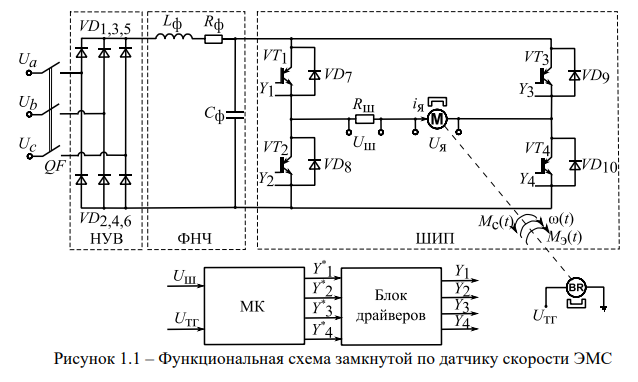
1.1 Структура рассматриваемой ЭМС.....................................................................8
1.2 Расчет основных параметров ДПТ НВ ............................................................12
2 Математическое моделирование ДПТ НВ.................................................................14
2.1 Допущения при моделировании ДПТ НВ ...........................................................14
2.2 Составление математической модели..................................................................15
3 Алгоритмы оценки неизмеряемых переменных .......................................................18
3.1 Наблюдатели состояния ........................................................................................18
3.1.1 Непрямые измерители положения .................................................................19
3.1.2 Измерители ошибки ориентирования............................................................19
3.1.3 Неадаптивные наблюдатели на основе моделей двигателя ........................20
3.1.4 Адаптивные наблюдатели на основе модели двигателя..............................20
3.1.5 Наблюдатели на основе фильтра Калмана....................................................22
3.2 Наблюдатель угловой скорости ДПТ НВ с П-принципом отработки сигнала невязки...........................................................................................................................24
3.3 Наблюдатель момента сопротивления с П-принципом отработки сигнала
невязки...........................................................................................................................30
3.4 Наблюдатель момента сопротивления с ПИ-принципом отработки сигнала
невязки...........................................................................................................................38
4 Цифровые системы управления ..................................................................................50
4.1 Билинейное преобразование .................................................................................50
4.2 Дискретный наблюдатель угловой скорости ДПТ НВ с П-принципом
отработки сигнала невязки..........................................................................................53
4.3 Дискретный наблюдатель момента сопротивления с П-принципом отработки
сигнала невязки ............................................................................................................59
4.4 Наблюдатель момента сопротивления с ПИ-принципом отработки сигнала
невязки...........................................................................................................................67
Выводы .............................................................................................................................77
Список используемых источников ................................................................................78
![]()
1. Настроить математическую модель замкнутой электромеханической системы «ШИП-ДПТ НВ» с электродвигателем, приведённым в техническом задании.
2. Настроить и провести сравнительный анализ динамики наблюдателя состояния полного порядка с П- и ПИ-принципами отработки невязки. Примечание: синтез и анализ провести в непрерывном времени.
3. Настроить и провести сравнительный анализ динамики электромеханической системы «ШИП-ДПТ НВ», замкнутой по сигналам от датчика угловой скорости и от наблюдателя состояния. Примечание: синтез и анализ провести в непрерывном времени.
4. Настроить и провести сравнительный анализ динамики не менее двух дискретных вариантов наблюдателя.
5. Настроить и провести сравнительный анализ динамики микропроцессорной электромеханической системы «ШИП-ДПТ НВ», замкнутой по сигналам от датчика угловой скорости и от наблюдателя состояния. Примечание: синтез и анализ провести в дискретном времени.
Оглавление
Список сокращений...........................................................................................................5
Введение .............................................................................................................................6
1 Общие сведения..............................................................................................................8
1.1 Структура рассматриваемой ЭМС.....................................................................8
1.2 Расчет основных параметров ДПТ НВ ............................................................12
2 Математическое моделирование ДПТ НВ.................................................................14
2.1 Допущения при моделировании ДПТ НВ ...........................................................14
2.2 Составление математической модели..................................................................15
3 Алгоритмы оценки неизмеряемых переменных .......................................................18
3.1 Наблюдатели состояния ........................................................................................18
3.1.1 Непрямые измерители положения .................................................................19
3.1.2 Измерители ошибки ориентирования............................................................19
3.1.3 Неадаптивные наблюдатели на основе моделей двигателя ........................20
3.1.4 Адаптивные наблюдатели на основе модели двигателя..............................20
3.1.5 Наблюдатели на основе фильтра Калмана....................................................22
3.2 Наблюдатель угловой скорости ДПТ НВ с П-принципом отработки сигнала невязки...........................................................................................................................24
3.3 Наблюдатель момента сопротивления с П-принципом отработки сигнала
невязки...........................................................................................................................30
3.4 Наблюдатель момента сопротивления с ПИ-принципом отработки сигнала
невязки...........................................................................................................................38
4 Цифровые системы управления ..................................................................................50
4.1 Билинейное преобразование .................................................................................50
4.2 Дискретный наблюдатель угловой скорости ДПТ НВ с П-принципом
отработки сигнала невязки..........................................................................................53
4.3 Дискретный наблюдатель момента сопротивления с П-принципом отработки
сигнала невязки ............................................................................................................59
4.4 Наблюдатель момента сопротивления с ПИ-принципом отработки сигнала
невязки...........................................................................................................................67
Выводы .............................................................................................................................77
Список используемых источников ................................................................................78
Характеристики курсовой работы
Просмотров
1
Качество
Идеальное компьютерное
Размер
6,68 Mb
Список файлов
primer.pdf

Если нужен другой вариант работы или отдельная задача из любой работы, пишите в комментарии
01 октября 2025 в 05:38
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!

















