Ответы к экзамену: Теория к экзамену
Описание
Показать/скрыть дополнительное описание
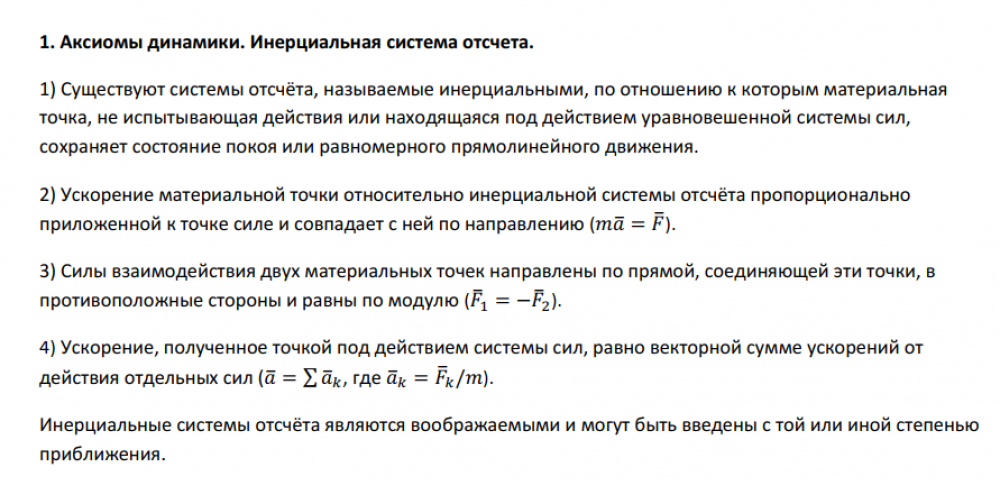
1. Аксиомы динамики. Инерциальная система отсчета. 1) Существуют системы отсчёта, называемые инерциальными, по отношению к которым материальная точка, не испытывающая действия или находящаяся под действием уравновешенной системы сил, сохраняет состояние покоя или равномерного прямолинейного движения. 2) Ускорение материальной точки относительно инерциальной системы отсчёта пропорционально приложенной к точке силе и совпадает с ней по направлению ( 𝑚𝑎̅ = 𝐹̅ ). 3) Силы взаимодействия двух материальных точек направлены по прямой, соединяющей эти точки, в противоположные стороны и равны по модулю ( 𝐹̅ 1 = -𝐹̅ 2 ). 4) Ускорение, полученное точкой под действием системы сил, равно векторной сумме ускорений от действия отдельных сил ( 𝑎̅ = ∑ 𝑎̅ 𝑘 , где 𝑎̅ 𝑘 = 𝐹̅ 𝑘 /𝑚 ).
Инерциальные системы отсчёта являются воображаемыми и могут быть введены с той или иной степенью приближения. 2. Дифференциальные уравнения движения точки в векторной форме и в проекциях на декартовы и естественные оси координат. Векторное дифференциальное уравнение движения точки: 𝑚 = 𝐹̅ (𝑡, 𝑟̅, ) 𝑑 2 𝑟̅ 𝑑𝑟̅ 𝑑𝑡 2 𝑑𝑡 В проекциях на декартовы оси: {𝑚𝑚𝑚𝑦𝑥𝑧̈̈̈ = == 𝐹 𝐹𝐹 𝑦 𝑧𝑥 (((𝑡𝑡𝑡,,,𝑥𝑥𝑥,,,𝑦𝑦𝑦,,,𝑧𝑧𝑧,,,𝑥𝑥𝑥̇̇̇,,,𝑦𝑦𝑦̇̇̇,,,𝑧𝑧𝑧̇)̇̇)) В проекциях на естественные оси (базис 𝜏̅, 𝑛̅, 𝑏̅ ): { 𝑚 𝑑 2 𝑠 𝑑𝑡 2 = 𝐹 𝜏 𝑚 𝑣 2 𝜌 = 𝐹 𝑛 𝐹 𝑏 = 0 где 𝑣 = |𝑣 𝜏 | = |𝑑𝑠/𝑑𝑡| , а 𝜌 – радиус кривизны траектории. Третье уравнение является условием равновесия для проекций сил на бинормаль.
3. Дифференциальные уравнения движения точки в неинерциальной системе координат. Принцип относительности Галилея-Ньютона. Неинерциальной называется система отсчёта, которая движется с ускорением относительно другой, инерциальной системы отсчёта. 𝑎̅ = 𝑎̅ 𝑟 + 𝑎̅ 𝑒 + 𝑎̅ 𝑘 𝑚𝑎̅ 𝑟 = 𝐹̅ + (-𝑚𝑎̅ 𝑒 ) + (-𝑚𝑎̅ 𝑘 ), 𝑚𝑎̅ 𝑟 = 𝐹̅ + Ф̅ 𝑒 + Ф̅ 𝑘 Дифференциальные уравнения движения точки в НСО: {𝑚𝑚𝑚𝑦𝑥𝑧̈̈̈ === 𝐹𝐹𝐹 𝑦𝑥𝑧 + + + Ф ФФ 𝑒𝑦 𝑒𝑧 𝑒𝑥 +++ ФФФ 𝑘𝑧 𝑘𝑥 𝑘𝑦 Принцип относительности Галилея-Ньютона : невозможно отличить одну инерциальную систему от другой путём наблюдения за механическим движением тел. 4. Центр масс системы материальных точек. Теорема о движении центра масс.
Центр масс характеризует распределение масс материальных точек в системе. Центр масс – это геометрическая точка 𝐶 , положение которой определяется радиус-вектором 𝑟 𝑐 ̅ : 𝑟̅ 𝑐 = ∑ 𝑖 𝑚 𝑖 𝑟 𝑖 ̅ 𝑀 Спроецировав на оси ДСК можно получить выражения для координат центра масс: 𝑥 𝑐 = , 𝑦 𝑐 = , 𝑧 𝑐 = ∑ 𝑖 𝑚 𝑖 𝑥 𝑖 ∑ 𝑖 𝑚 𝑖 𝑦 𝑖 𝑀 𝑀 ∑ 𝑖 𝑚 𝑖 𝑧 𝑖 𝑀 , где ∑ 𝑖 𝑚 𝑖 𝑥 𝑖 = 𝑆 𝑂𝑦𝑧 , ∑ 𝑖 𝑚 𝑖 𝑦 𝑖 = 𝑆 𝑂𝑥𝑧 , ∑ 𝑖 𝑚 𝑖 𝑧 𝑖 = 𝑆 𝑂𝑥𝑦 – статические моменты массы системы относительно координатных плоскостей. Для сплошных однородных тел суммирование можно заменить интегрированием по 𝑑𝑚 . Теорема о движении центра масс : произведение массы системы на ускорение её центра масс равно геометрической сумме всех действующих на систему внешних сил.
Доказательство : дважды продифференцируем векторное уравнение для радиус-вектора центра масс: 𝑟̅ 𝑐 = ∑ 𝑖 𝑚 𝑖 𝑟 𝑖 ̅ 𝑀 | 𝑑𝑡 2 ⟹ 𝑎̅ 𝑐 = ∑ 𝑖 𝑚 𝑀 𝑖 𝑎̅ 𝑖 Разделим все силы, действующие на материальные точки на две категории: внешние и внутренние. Равнодействующая сил, действующих на -ю точку – 𝐹̅ 𝑖 . Сила, с которой на 𝑖 -ю точку действует 𝑘 -я точка – 𝑓 𝑘 ̅ ,𝑖 . Тогда 𝑚 𝑖 𝑎̅ 𝑖 = 𝐹̅ 𝑖 + ∑ 𝑘 𝑓 𝑘 ̅ ,𝑖 , ∑ 𝑖 𝑚 𝑖 𝑎̅ 𝑖 = ∑ 𝑖 𝐹̅ 𝑖 + ∑ 𝑖 ∑ 𝑘 𝑓 𝑘 ̅ ,𝑖 . Сумма внутренних сил равна нулю (согласно 3- й аксиоме динамики), поэтому ∑ 𝑖 𝑚 𝑖 𝑎̅ 𝑖 = ∑ 𝑖 𝐹̅ 𝑖 . Тогда: 𝑎̅ 𝑐 = ∑ 𝑖 𝑚 𝑖 𝑎̅ 𝑖 𝑀 = ∑ 𝑖 𝐹̅ 𝑖 𝑀 ∎ 5. Дифференциальные уравнения поступательного движения твердого тела.
При поступательном движении тела его угловая скорость и, следовательно, главный момент количества движения относительно центра масс тождественно равны нулю. Д.У. поступательного движения твёрдого тела в векторном виде: 𝑚𝑎̅ = ∑ 𝐹̅ 𝑖(𝑒) 𝑖 , где 𝑎̅ – ускорение центра масс тела. Д.У. поступательного движения твёрдого тела в проекциях на оси ДСК: 𝑚𝑥̈ = ∑ 𝐹 𝑖𝑥 , 𝑚𝑦̈ = ∑ 𝐹 𝑖𝑦 , 𝑚𝑧̈ = ∑ 𝐹 𝑖𝑧 (𝑒) (𝑒) (𝑒) 𝑖 𝑖 𝑖 Д.У. поступательного движения твёрдого тела в проекциях на естественные оси: 𝑚𝑠̈ = ∑ 𝐹 𝑖𝜏 (𝑒) 𝑖 , 𝑚 𝑠̇ 2 𝜌 = ∑ 𝐹 𝑖𝑛 (𝑒) 𝑖 , 0 = ∑ 𝐹 𝑖𝑏 (𝑒) 𝑖 6. Теорема об изменении количества движений точки и системы материальных точек в дифференциальной и интегральной формах.
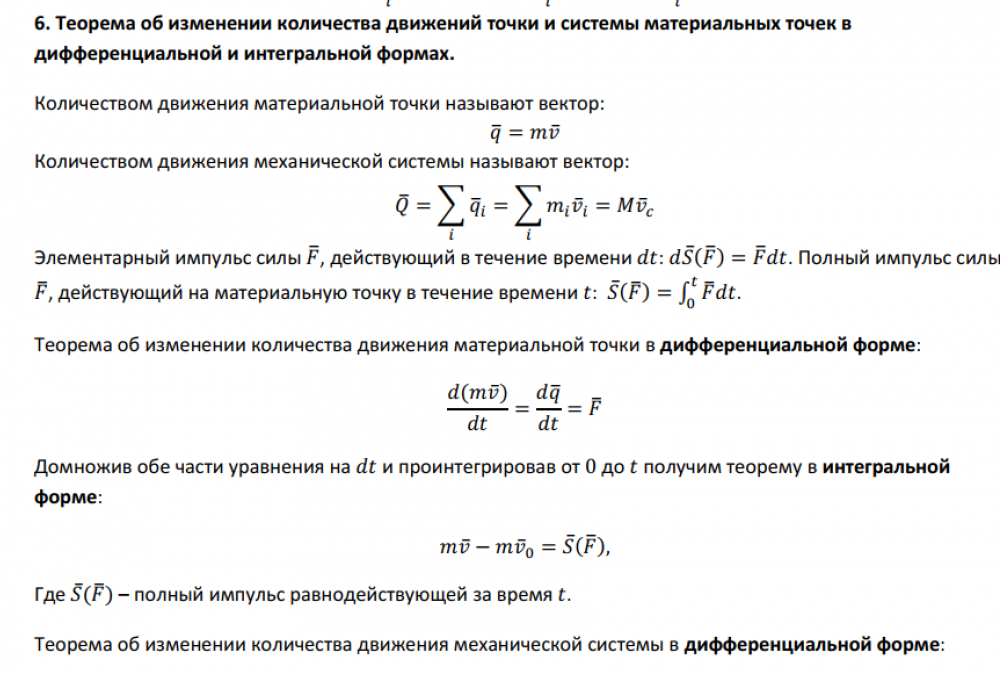
Количеством движения материальной точки называют вектор: 𝑞̅ = 𝑚𝑣̅ Количеством движения механической системы называют вектор: 𝑄̅ = ∑ 𝑞̅ 𝑖 𝑖 = ∑ 𝑚 𝑖 𝑣̅ 𝑖 𝑖 = 𝑀𝑣̅ 𝑐 Элементарный импульс силы 𝐹̅ , действующий в течение времени 𝑑𝑡 : 𝑑𝑆̅(𝐹̅) = 𝐹̅𝑑𝑡 . Полный импульс силы 𝐹̅ , действующий на материальную точку в течение времени 𝑡 : 𝑆̅(𝐹̅) = ∫ 0𝑡 𝐹̅𝑑𝑡 . Теорема об изменении количества движения материальной точки в дифференциальной форме : 𝑑(𝑚𝑣̅) 𝑑𝑡 = 𝑑𝑞̅ 𝑑𝑡 = 𝐹̅ Домножив обе части уравнения на 𝑑𝑡 и проинтегрировав от 0 до 𝑡 получим теорему в интегральной форме : 𝑚𝑣̅ - 𝑚𝑣̅ 0 = 𝑆̅(𝐹̅), Где 𝑆̅(𝐹̅) – полный импульс равнодействующей за время 𝑡 .
Теорема об изменении количества движения механической системы в дифференциальной форме : 𝑑(𝑀𝑣 𝑐 ̅ ) 𝑑𝑄̅ 𝑑𝑡 𝑑𝑡 = = ∑ 𝐹̅ 𝑖(𝑒) 𝑖 Домножив обе части уравнения на 𝑑𝑡 и проинтегрировав от 0 до 𝑡 получим теорему в интегральной форме : 𝑄̅ - 𝑄̅ 0 = ∑ 𝑆 𝑖 ̅ (𝑒) 𝑖 7. Движение точки переменной массы. Уравнение Мещерского. I-я задача Циолковского. Для вывода уравнения движения точки переменной массы воспользуемся теоремой об изменении количества движения механической системы. Для этого рассмотрим механическую систему, состоящую из частиц постоянной массы, которые в момент времени 𝑡 составляют материальную точку ℳ (с массой 𝑀 и скоростью 𝑣̅ ) и за время ∆𝑡 присоединятся к материальной точке ℳ (обозначим их массы 𝜇 1(1) , … , 𝜇 𝑁(1 1 ) , скорости в момент времени 𝑡 – 𝑣 1 ̅ (1) , … , 𝑣 𝑁 ̅ (1 1 ) ).
Пусть 𝜇 1(2) , … , 𝜇 𝑁(2 1 ) – массы тех частиц, которые за время ∆𝑡 отделятся от точки ℳ , а 𝑣 1 ̅ (2) , … , 𝑣 𝑁 ̅ (2 1 ) – их абсолютные скорости в момент времени 𝑡 + ∆𝑡 . Введём также обозначения: 𝑣̅ 1 = ∑ 𝜇 𝑖(1) 𝑣̅ 𝑖(1) ∆𝑚 1 , 𝑣̅ 2 = ∑ 𝜇 𝑖(2) 𝑣̅ 𝑖(2) ∆𝑚 2 , где ∆𝑚 1 = ∑ 𝜇 𝑖(1) , ∆𝑚 2 = ∑ 𝜇 𝑖(2) . Запишем количество движения этой механической системы в моменты времени 𝑡 и 𝑡 + ∆𝑡 : 𝑄̅(𝑡) = 𝑀𝑣̅ + ∆𝑚 1 𝑣̅ 1 𝑄̅(𝑡 + ∆𝑡) = (𝑀 + ∆𝑚 1 - ∆𝑚 2 )(𝑣̅ + ∆𝑣̅) + ∆𝑚 2 𝑣̅ 2 ∆𝑄̅(𝑡) = 𝑄̅(𝑡 + ∆𝑡) - 𝑄̅(𝑡) = 𝑀∆𝑣̅ + ∆𝑚 1 (𝑣̅ - 𝑣̅ 1 ) - ∆𝑚 2 (𝑣̅ - 𝑣̅ 2 ) + (∆𝑚 1 - ∆𝑚 2 )∆𝑣̅ 𝑑𝑄̅ 𝑑𝑡 = ∆ lim 𝑡→0 ∆𝑄̅(𝑡) ∆𝑡 = 𝑀 𝑑𝑣̅ 𝑑𝑡 + (𝑣̅ - 𝑣̅ 1 ) 𝑑𝑚 1 𝑑𝑡 - (𝑣̅ - 𝑣̅ 2 ) 𝑑𝑚 2 𝑑𝑡 Запишем теорему об изменении количества движения системы 𝑑𝑄̅ 𝑑𝑡 = ∑ 𝐹̅ 𝑖(𝑒) и получим обобщённое уравнение Мещерского : 𝑀 𝑑𝑣̅ 𝑑𝑡 = 𝐹̅ + (𝑣̅ 1 - 𝑣̅) 𝑑𝑑𝑡 𝑚 1 - (𝑣̅ 2 - 𝑣̅) 𝑑𝑑𝑡 𝑚 2 Первая задача Циолковского .
Пусть ТПМ движется в безвоздушном пространстве вне силового поля, причём имеет место лишь процесс отделения частиц. Движение такой точки моделирует движение ракеты в космосе (учитывая различные пренебрежения). Тогда 𝐹̅ = 0 и из уравнения Мещерского получим векторное уравнение движения ракеты: 𝑀 = 𝑢̅ 𝑟 , 𝑑𝑣̅ 𝑑𝑀 𝑑𝑡 𝑑𝑡 где 𝑢̅ 𝑟 – относительная скорость отделения продуктов сгорания топлива. Полагая, что 𝑢̅ 𝑟 постоянна по величине и направлена противоположно скорости 𝑣̅ ракеты, найдём скорость и закон движения ракеты. Направим ось 𝑂𝑥 вдоль вектора скорости 𝑣̅ ракеты. В проекции на ось 𝑂𝑥 уравнение Мещерского с учётом, что 𝑣 𝑥 = 𝑣, 𝑢 𝑟𝑥 = -𝑢 𝑟 , имеет вид: 𝑀𝑑𝑣 = -𝑢 𝑟 𝑑𝑀 Разделяя переменные и интегрируя найдём: 𝑣 = 𝑣 0 + 𝑢 𝑟 ln (𝑀𝑀( 0 𝑡)) Так как 𝑀 0 = 𝑀 к + 𝑀 т , где 𝑀 к – масса корпуса ракеты, 𝑀 т – масса топлива в начальный момент времени, из полученной формулы можно найти предельную скорость, которую получит ракета, когда всё топливо будет израсходовано: 𝑣 к = 𝑣 0 + 𝑢 𝑟 ln (1 + 𝑀𝑀 т к ) Путь, пройденный ракетой, зависит от закона сгорания топлива.
Полагая 𝑥(0) = 0 получим: 𝑥(𝑡) = 𝑣 0 𝑡 + 𝑢 𝑟 ∫ ln (𝑀𝑀( 0 𝑡)) 𝑑𝑡 𝑡 0 8. Кинетический момент точки и системы материальных точек относительно центра и оси. Кинетический момент (момент количества движения) точки относительно центра 𝑂 : 𝑘̅ 𝑂 = 𝑀̅ 𝑂 (𝑞̅) = 𝑟̅ × 𝑞̅ = 𝑟̅ × 𝑚𝑣̅ Проекции 𝑘̅ 𝑂 на оси равны кинетическим моментам относительно соответствующих осей: 𝑘 𝑥 = 𝑚(𝑦𝑧̇ - 𝑧𝑦̇), 𝑘 𝑦 = 𝑚(𝑧𝑥̇ - 𝑥𝑧̇), 𝑘 𝑧 = 𝑚(𝑥𝑦̇ - 𝑦𝑥̇) Кинетический момент механической системы относительно центра 𝑂 : 𝐾̅ 𝑂 = ∑ 𝑘̅ 𝑂𝑖 𝑖 = ∑ 𝑀̅ 𝑂 (𝑞̅ 𝑖 ) 𝑖 = ∑ 𝑟 𝑖 ̅ × 𝑚 𝑖 𝑣̅ 𝑖 𝑖 Проекции 𝐾̅ 𝑂 на оси равны главным кинетическим моментам относительно соответствующих осей: 𝐾 𝑥 = ∑ 𝑚 𝑖 (𝑦 𝑖 𝑧̇ 𝑖 - 𝑧 𝑖 𝑦̇ 𝑖 ) 𝑖 , 𝐾 𝑦 = ∑ 𝑚 𝑖 (𝑧 𝑖 𝑥̇ 𝑖 - 𝑥 𝑖 𝑧̇ 𝑖 ) 𝑖 , 𝐾 𝑧 = ∑ 𝑚 𝑖 (𝑥 𝑖 𝑦̇ 𝑖 - 𝑦 𝑖 𝑥̇ 𝑖 ) 𝑖 Главный кинетический момент относительно оси вращения при вращательном движении твёрдого тела: 𝐾 𝑧 = ∑ 𝑀 𝑧 (𝑚 𝑖 𝑣̅ 𝑖 ) 𝑖 = ∑ 𝑚 𝑖 𝑣 𝜏𝑖 ℎ 𝑖 𝑖 = ∑ 𝜔 𝑧 𝑚 𝑖 ℎ 𝑖2 𝑖 = 𝜔 𝑧 ∑ 𝑚 𝑖 ℎ 𝑖2 𝑖 = 𝜔 𝑧 𝐽 𝑧 9.
Теорема об изменении кинетического момента для точки и системы материальных точек. Уравнение движения материальной точки: 𝑚 𝑑𝑣̅ 𝑑𝑡 = 𝐹̅ Домножим его слева векторно на 𝑟̅ : 𝑟̅ × 𝑚 𝑑𝑣̅ 𝑑𝑡 = 𝑟̅ × 𝐹̅ Преобразуем левую часть: 𝑟̅ × 𝑚 𝑑𝑣̅ 𝑑𝑡 = 𝑑(𝑟̅ × 𝑚𝑣̅) 𝑑𝑡 - 𝑑𝑟̅ 𝑑𝑡 × 𝑚𝑣̅ = 𝑑(𝑟̅ × 𝑚𝑣̅) 𝑑𝑡 - 𝑣̅ × 𝑚𝑣̅ = 𝑑(𝑟̅ × 𝑚𝑣̅) 𝑑𝑡 𝑑(𝑟̅ × 𝑚𝑣̅) 𝑑𝑡 = 𝑑(𝑘̅ 𝑂 ) 𝑑𝑡 = 𝑟̅ × 𝐹̅ = 𝑀̅ 𝑂 (𝐹̅) Теорема об изменении кинетического момента для точки: 𝑑(𝑘̅ 𝑂 ) 𝑑𝑡 = 𝑀̅ 𝑂 (𝐹̅) Для механической системы запишем сумму теорем об изменении кинетического момента для всех точек: ∑ 𝑑(𝑟 𝑖 ̅ ×𝑑𝑡𝑚 𝑖 𝑣̅ 𝑖 ) 𝑖 = ∑ 𝑟 𝑖 ̅ × 𝐹̅ 𝑖(𝑒) 𝑖 Преобразуем левую часть: ∑ 𝑑(𝑟 𝑖 ̅ ×𝑑𝑡𝑚 𝑖 𝑣̅ 𝑖 ) 𝑖 = 𝑑 𝑑𝑡 (∑ 𝑖 𝑟 𝑖 ̅ × 𝑚 𝑖 𝑣̅ 𝑖 ) = 𝑑𝑑𝑡 𝐾̅ 𝑂 ∑ 𝑟 𝑖 ̅ × 𝐹̅ 𝑖(𝑒) 𝑖 = 𝐿̅ (𝑒 𝑂 ) Теорема об изменении кинетического момента для механической системы: 𝑑𝐾̅ 𝑂 𝑑𝑡 = 𝐿̅ (𝑂𝑒) 10.
Дифференциальное уравнение вращения твердого тела вокруг неподвижной оси. Теорема об изменении главного кинетического момента механической системы относительно оси вращения 𝑂𝑧 : 𝑑𝐾 𝑧 𝑑𝑡 = ∑ 𝑀 𝑧 (𝐹̅ 𝑖(𝑒) ) 𝑖 Для твёрдого тела 𝐾̅ 𝑧 = 𝜔 𝑧 𝐽 𝑧 = 𝜑̇ 𝐽 𝑧 , тогда имеем Д.У. вращения твёрдого тела вокруг ос....
Характеристики ответов (шпаргалок) к экзамену
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСписок файлов
 The Best Choice
The Best ChoiceКомментарии
Отзывы на другие работы автора



















