НИР: Позиционирование подвижных объектов. SLAM метод
-41%
Описание
ВВЕДЕНИЕ
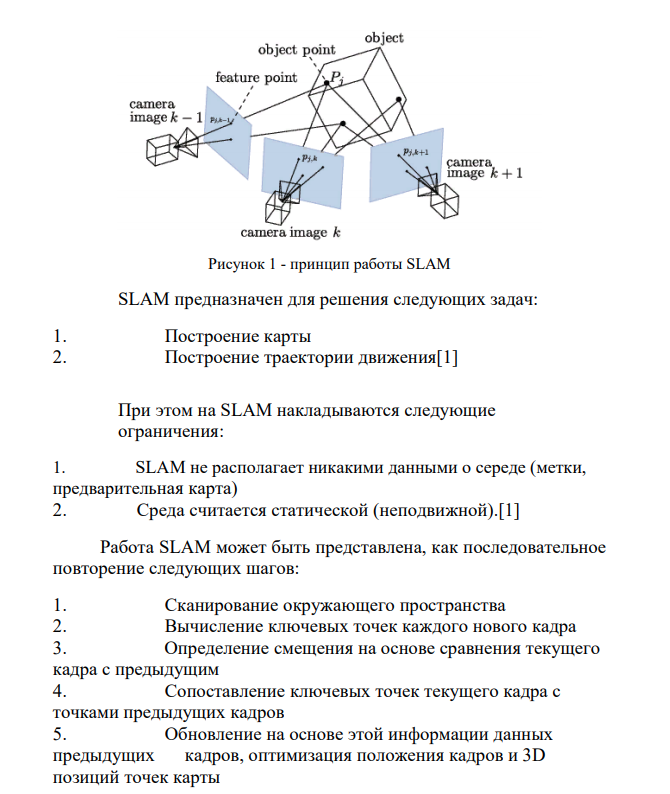
Одной из важнейших задач компьютерного зрения является задача построения карты пространства, которая реализуется путём применения алгоритма одновременного позиционирования и построения карты местности (Simultaneous Localization And Mapping – SLAM). Он выполняет глобальную оптимизацию получаемых с камеры данных. Минимизирует ошибку определения позиции камеры и вычисления инверсной глубины ключевых точек. SLAM используется для навигации управляемых и автономных роботов в помещении, на улице, ввоздухе и под водой.
![]()
![]()
![]()
Одной из важнейших задач компьютерного зрения является задача построения карты пространства, которая реализуется путём применения алгоритма одновременного позиционирования и построения карты местности (Simultaneous Localization And Mapping – SLAM). Он выполняет глобальную оптимизацию получаемых с камеры данных. Минимизирует ошибку определения позиции камеры и вычисления инверсной глубины ключевых точек. SLAM используется для навигации управляемых и автономных роботов в помещении, на улице, ввоздухе и под водой.


Характеристики НИР
Предмет
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаПросмотров
4
Размер
997,32 Kb
Список файлов
Позиционирование подвижных объектов. slam метод.pdf

Друзья, спасибо за доверие! Если вам понравилась работа – поставьте 5⭐ и напишите отзыв. Это поможет другим студентам, а мне даст силы делать ещё больше качественных материалов для вас 🔥
 anhyeuem
anhyeuem
16 мая 2021 в 03:34
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!



















