Курсовая работа: САУ микрофрезерного станка
Описание
Расчётно-пояснительная записка
курсового проекта
«Системы автоматического управления»
тема: «САУ микрофрезерного станка ».
Дата защиты: 12.12.2013 г.
РЕФЕРАТ
Ключевые слова: печатные платы, микрофрезерный станок, шаговый двигатель, программный контроль точности.
Курсовой проект посвящен проектированию системы автоматического управления микрофрезерного станка и содержит:
5 листов формата А1;
1 лист формата А2;
выполненных в САПР ASCON KomPas v14.
Данная записка выполнена в формате Microsoft Word 2003 и содержит 35 страницы, 23 рисунка, 9 таблиц.
В данном курсовом проекте рассмотрен процесс построения аппаратной и програмной частей САУ, определены основные сигналы управления и контроля, предложен программный метод коррекции цели.
Первый лист (А1) – процессная модель.
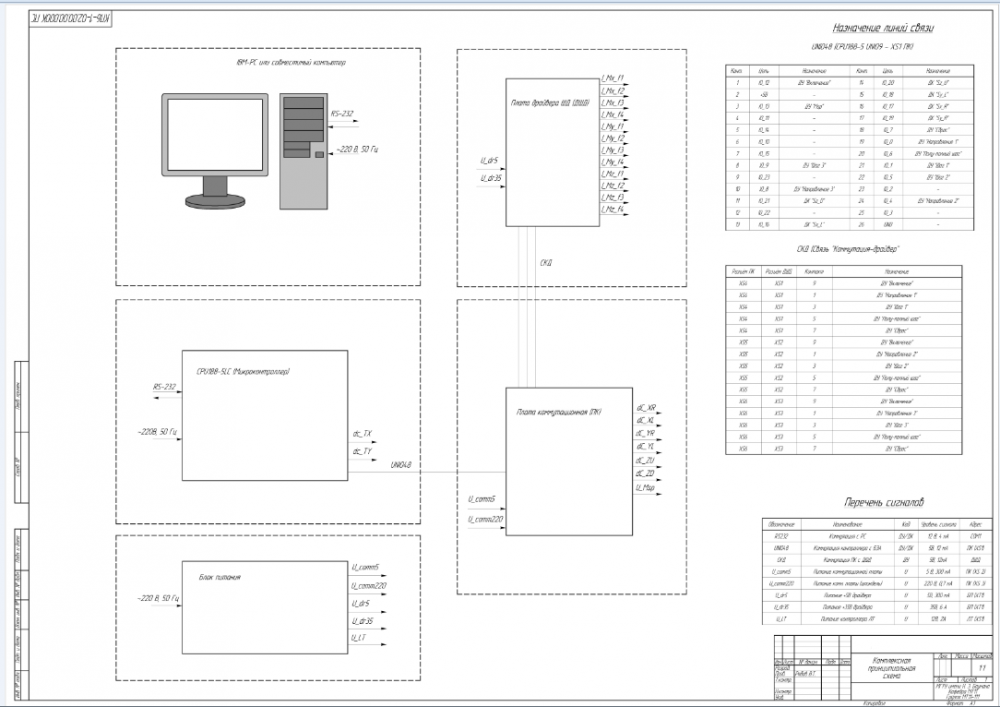
Второй лист (А1) – комплексно-принципиальная схема (приводы станка и системы контроля).
Третий лист (А1) – комплексно-принципиальная схема (контроллер и блок энергоавтоматики).
Четвертый лист (А1) – схема электрических соединений.
Пятый лист (А1) – Схема платы ШД
Шестой лист – (А2) – интерфейс ПО и алгоритм работы ПО начального установа.
Содержание
Реферат……………………………………………………………………………………………….…………………..2
Задание на проектирование………………………………………………………………….……………….4
1. Введение. Описание составных частей станка..…………..…………………… ………………5
1.1. Шаговые двигатели………………………………………………………………………………………….5
1.2. Фрезерная головка………………………………………………………………………………………… 6
2. Процессная модель. Функции……………………………………………………………………………..7
2.1. Структура процессов в САУ……………………………………………………………………………….7
2.2. Функции……………………………………………………………………………………………………………8
2.3. G –code………………………………………………………………………………………………………….…..8
2.4. Техническое задание. Определение состава ПО микроконтроллера……………..12
3. Комплексная принципиальная схема…………………………………………………………….…13
3.1. Описание КПС………………………………………………………………………………………………….13
3.2. Перечень элементов……………………………………………………………………………………….13
3.3. Перечень потоков и сигналов………………………………………………………………………....13
4. Выбор САУ…………………………………………………………………………………………………………..15
4.1. Микроконтроллер…………………………………………………………………………………………..15
4.2.Блок энергоавтоматики…………………………………………………………………………………..15
4.3. Типы ключевых элементов…………………………………………………………………………….15
4.4. Способы включения обмоток…………………………………………………………………………15
4.5. Стабилизация токов………………………………………………………………………………………16
4.6. Выбор схемы драйвера шаговых двигателей………………………………………………..18
4.7. Схема коммутационной платы……………………………………………………………………….23
4.8. Схема электрических соединений……………………………………….....................................23
5. Система контроля. Начальный установ…………………………………………………………….24
5.1. Система контроля лазерным треккером………………………………………………………..24
5.2. Начальный установ…………………………………………………………………………………………27
5.3 Конвертер HPGL->G-CODE………………………………………………………………………………..31
Заключение и выводы…………………………………………………………………………………………..34
Список использованной литературы……………………………………………………………………35
1. Введение. Описание составных частей станка
В современной технике для производства микроэлектронных изделий, печатных плат и т.д. требуются микрофрезерные станки. Например, для фрезерования дорожек на печатной плате с последующей заливкой проводящим материалом или просверливания отверстий для монтажа электронных компонентов, а так же для получения 3D моделей разного рода изделий. Для всего этого нужны микрофрезерные станки с ЧПУ. В проектируемом станке предполагаются функции как сверлильного, так и фрезерного станков. Управление станком будет осуществляться с помощью компьютера посредством выполнения программ. Основной функцией станка является фрезерование и сверление отверстий текстолитовых печатных плат.
Станок состоит из электрической и механической частей. Рассмотрим устройство механической части.
Станок имеет жесткое основание, на котором закреплены координатный стол и стойка. В стойке смонтирован привод осей Y и Z. Привод состоит из передачи «винт-гайка», и приводится в движение шаговым двигателем.
Координатный стол осуществляет перемещение по координате X. В состав стола входит передача «винт-гайка», на которой закреплен стол с заготовкой. Вращение винту передают шаговые двигатели.
В электрическую часть входят:
- контроллер (программное обеспечение, запуск процессов);
- блок энергоавтоматики (сопряжение с механической частью, питание);
- персональный компьютер (CAD-система и средства визуализации).
1.1. Шаговые двигатели
В микрофрезерном станке используются шаговые двигатели двух моделей:
ДШИ-200-3 (перемещение по осям X и Y) и ДШИ-200-2 (перемещение по оси Z).
Рис.1. Шаговые двигатели ДШИ-200
Паспортные данные этих двигателей приведены в таблице:
Параметры | 200-3 | 200-2 |
Номинальный ток питания в фазе, А | 1,5 | |
Максимально допустимый ток в фазе, А | 2 | |
Сопротивление фазных обмоток, Ом | 3,35 | 2,1 |
Индуктивность фазных обмоток, мГ (не более) | 6,2 | 3,0 |
Максимальный статический синхронизирующий момент, Н·м | 0,84 | 0,46 |
Максимальная частота приемистости, Гц (не менее) | 1000 | |
Единичный шаг, град. и статическая погрешность отработки шага | 1,8 (±3%) | |
Максимальная потребляемая мощность, Вт (не более) | 16,7 | 11,8 |
Табл. 1. Параметры шаговых двигателей
Электрическая схема электродвигателя представлена на рисунке:
Рис. 2. Электрическая схема шаговых двигателей ДШИ-200
1.2. Фрезерная головка
Для передачи вращательного движения от мотора к шпинделю может быть
использована ременная или зубчатая передача. Однако в современных станках в
подавляющем большинстве случаев используют мотор-шпиндель, то есть шпиндель, непосредственно присоединенный к мотору. Такое решение позволяет уменьшить массу привода шпинделя и, следовательно, нагрузку на другие приводы, упростить конструкцию станка и повысить его КПД.
Критерии для выбора мотор-шпинделя – мощность, скорость вращения и крутящий
момент, которые должны соответствовать режиму резания при черновой обработке, для которой характерны наибольшие значения этих параметров. Также немалую роль при выборе играют масса и габаритные размеры мотор-шпинделя: чем они меньше, тем менее нагружены приводы станка и тем он удобнее в эксплуатации.
Выбран мотор-шпиндель SC 50101 как наиболее легкий и компактный (см. рис. 2).
Модель | Произво -дитель | Номи- нальная мощность, кВт | Номинальны й крутящий момент, Нм | Скорость вращения , об/мин | Габаритные размеры,мм | Масса, кг | Модель |
SC50101 | Fisher Precise | 2 | 11 | 1000-5000 | 350 | 100 | 14,7 |
Табл. 2. Характеристики мотор-шпинделя.
Характеристики курсовой работы
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСписок файлов

Начать зарабатывать
 zzyxel
zzyxelКомментарии
Отзывы на другие работы автора