Курсовая работа: Макет узла подложки автоматизированной установки вакуумного нанесения тонких пленок
Описание
Чертежи в JPG
«макет узла подложки автоматизированной установки вакуумного нанесения Тонких пленок »
Москва — 2013 г
ЗАДАНИЕ
на курсовой проект по курсу «Основы проектирования систем автоматического управления оборудования электронных технологий».
Тема проекта: Макет узла подложки автоматизированной
установки вакуумного нанесения тонких пленок
1. Проработать описание работы машины, выбрать и обосновать состав его основных целевых функций, сервисных функций, функций коррекции цели.
2. Разработать комплексную принципиальную схему, как совокупность системы целевых механизмов, системы их энергообеспечения и системы управления, связанных материальными, энергетическими и информационными потоками.
3. Описать механический, энергетический и информационный интерфейс компонентов машины. Дать техническое задание и техническое предложение на САУ и основные элементы машины.
4. Разработать принципиальную электрическую схему элемента САУ или САУ в целом.
Содержание графической части.
- Процессная модель машины.......................................................1 л.
- Комплексная принципиальная схема.........................................1 л.
- Схема питания и управления.....................................................1 л.
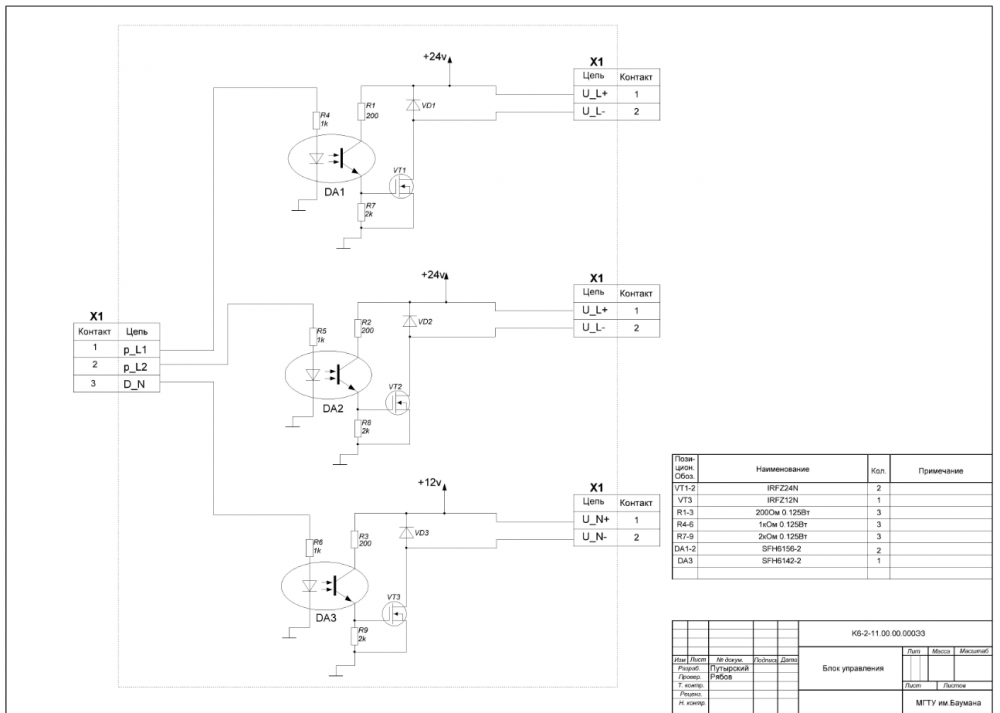
- Принципиальная электрическая схема блока управления.......1 л.
Содержание расчетно-пояснительной записки.
- Введение. Описание модуля подложки и его макета
- Описание процессной модели. Выбор и обоснование целевых, сервисных функций, и функций коррекции цели.
- Техническое задание и техническое предложение на систему управления машины по приведенной в Приложении 1 форме.
- Описание комплексной принципиальной схемы ФС. Обоснование структурно-компоновочного решения, выбор и согласование уровней потоков элементов.
- Документы, сопровождающие комплексную принципиальную схему:
- перечень элементов ПЭ;
- перечень потоков и сигналов ПС;
- Информационный поиск датчиков и исполнительных элементов машины и ее САУ, описание целевого, механического, энергетического и информационного интерфейса этих элементов ОЭ.
- Расчет и описание принципиальной электрической схемы.
- Заключение.
Содержание
1. Введение. Устройство модуля подложки и его макета. 2
2. Описание процессной модели. 3
4. Схема питания и управления. 6
5. Информационный поиск датчиков и исполнительных элементов машины и ее САУ 8
5.1. Центральный контроллер. 8
6. Подключение устройств ввода-вывода информации к центральному контроллеру 14
6.1. Подключение текстового экрана. 14
6.2. Подключение клавиатуры.. 15
Модуль подложки состоит из жесткого основания с закрепленными на нем двумя створками заслонки, которые поднимаются и опускаются путем включения и отключения двух длинноходовых электромагнитов, приводящих в действие кривошипные механизмы. На жестком основании закреплен подложкодержатель-нагреватель с установленным на нем чувствительным элементом датчика температуры и камертонным датчиком толщины покрытия. Основание модуля с помощью специальных планок для регулировки высоты подложки относительно источника жестко закреплено на верхнем фланце вакуумной камеры.
На данный момент на установке УВН-1 реализован модуль подложки с приводом заслонки на основе шагового двигателя. Такая конструкция имеет ряд недостатков:
- Нерациональное использование объема вакуумной камеры.
- Отсутствие возможности контроля толщины осаждаемой пленки (не предусмотрена установка кварцевых микровесов, камертонных датчиков и т.д.).
- Отсутствие возможности регулировки высоты подложки.
- Нерациональное использование нагревательного элемента.
Однако, несмотря не перечисленные выше недостатки такая конструкция является работоспособной. Поэтому, для отработки механической, аппаратной и программной частей модуля без прерывания работы установки разрабатывается специальный макет в котором будут сымитированы все функции модуля за исключением контроля толщины пленки, который кроме того будет иметь собственное энергообеспечение, устройство ввода, монитор и систему управления на основе аппаратной платформы Arduino Mega 2560.
В данном проекте разрабатывалась процессная модель автоматизированного управления модулем подложки установки вакуумного нанесения тонких пленок (см. лист1 "Процессная модель"), которые кроме процесса "нанесение покрытия с контролем по толщине" должны быть реализованы на макете модуля.
Система управления должна реализовывать основные целевые, сервисные функции и функции коррекции цели.
Основные целевые функции и их алгоритмы представлены на листе «Процессная модель». В табл.1 приведен перечень выполняемых в системе управления процессов для реализации целевых функций.
Таблица 1 Основные целевые функции
Установка должна работать в непрерывном цикле.
Система управления должна реализовать основные целевые, сервисные функции и функции коррекции цели.
1. Основные целевые функции
Характеристики курсовой работы
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСписок файлов

Начать зарабатывать
 zzyxel
zzyxelКомментарии
Отзывы на другие работы автора