СП-01Б-24, СП-02Б-24, СПЛМ-04Б - Сервоприводы (3Д модели, документация, фото) 3Д модели в универсальном формате .STEP
Описание
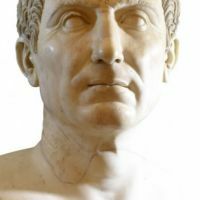
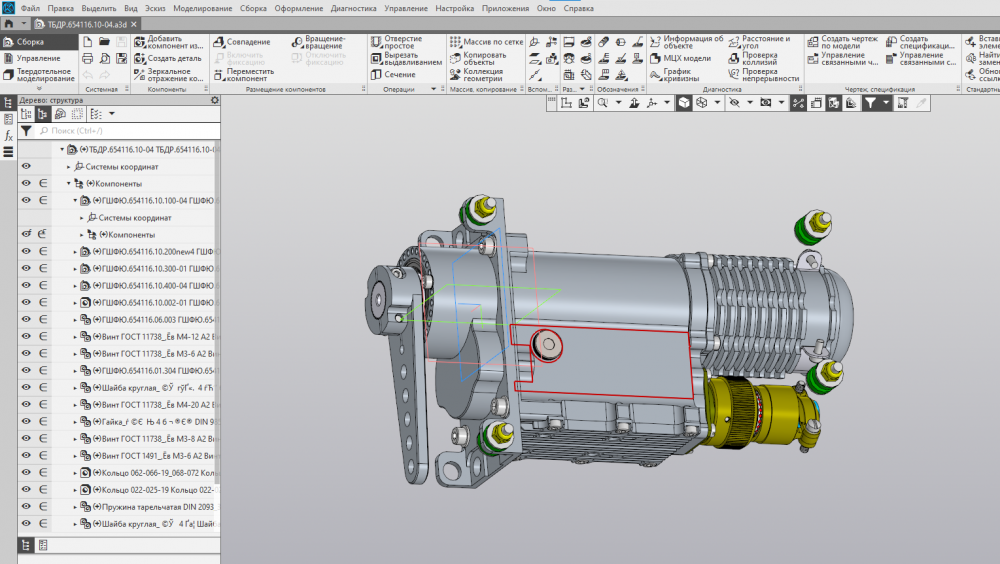
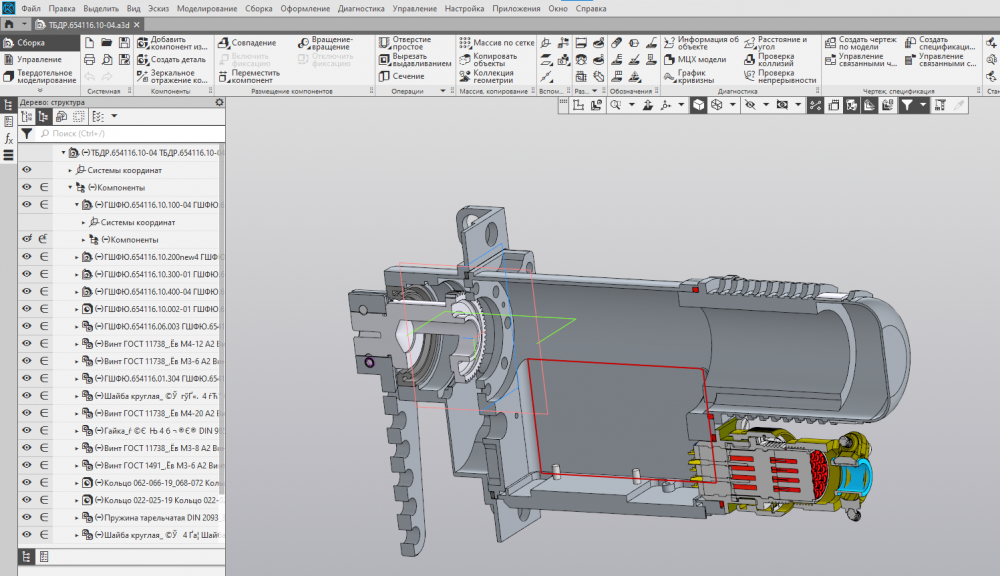
3Д модели в универсальном формате .STEP
Частичная деталировка "внутренностей"
СПЛМ-04Б - без 3Д, только документация
СП-01Б-24-108 (ГШФЮ.654116)
Сервопривод СП-01Б-XX-XXX
Техническое описание
Сервоприводы серии СП-01Б выпускаются с использованием синхронных электродвигателей, планетарных редукторов, имеют в составе два бесконтактных энкодера (абсолютный 14-бит на выходном валу и инкрементальный 4096 отсчета на валу электродвигателя) для реализации алгоритма компенсации люфта, рекуперативный шунт для сброса энергии при торможении. Сервоприводы управляются современным контроллером, который осуществляет векторное управление полем синхронного электродвигателя, реализует двухконтурную систему управления для компенсации механического люфта, взаимодействует с внешними системами посредством ряда стандартных физических интерфейсов и протоколов. Доступны варианты с разными передаточными числами от 108 до 178:1, разными максимальными угловыми скоростями и максимальными моментами от 25 Нм до 32 Нм.
1.1 Отрасли применения и примеры:
• Авиапром.
• Робототехника.
• Конверсия пилотируемых ЛА в БПЛА.
• Оснащение пилотируемых ЛА системами ав

СП-02Б-24-150_ТБДР.654116.30ГЧ

СП-02Б-XX-XXX [ТБДР.654116.30]
Сервоприводы серии СП-02Б выпускаются с использованием синхронных электродвигателей, планетарных редукторов, имеют в составе два бесконтактных энкодера (абсолютный 14-бит на выходном валу и инкрементальный 4096 отсчета на валу электродвигателя) для реализации алгоритма компенсации люфта, рекуперативный шунт для сброса энергии при торможении. Сервоприводы управляются современным контроллером, который осуществляет векторное управление полем синхронного электродвигателя, реализует двухконтурную систему управления для компенсации механического люфта, взаимодействует с внешними системами посредством ряда стандартных физических интерфейсов и протоколов. Доступны варианты с разными передаточными числами от 83 до 150:1, разными максимальными угловыми скоростями и максимальным моментом до 6 Нм.
1.1 Отрасли применения и примеры:
• Авиапром.
• Робототехника.
• Конверсия пилотируемых ЛА в БПЛА.
• Оснащение пилотируемых ЛА системами автопилота.
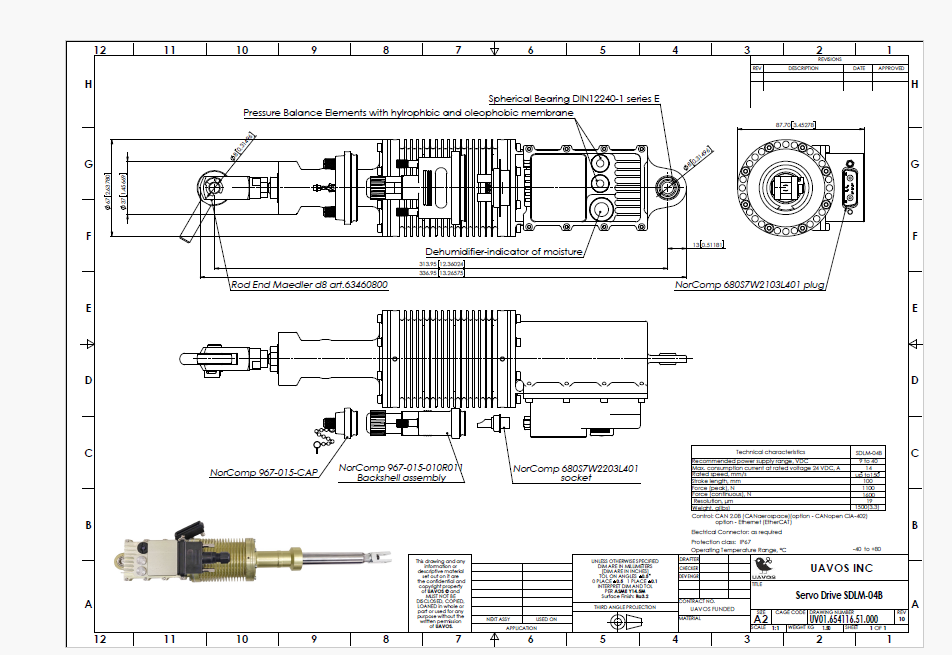
UV01.654116.51.000ВО Linear Servo Actuator SDLM-04B
Показать/скрыть дополнительное описание
СП-01Б-24, СП-02Б-24, СПЛМ-04Б - Сервоприводы (3Д модели, документация, фото) 3Д модели в универсальном формате .STEP Частичная деталировка \"внутренностей\" СПЛМ-04Б - без 3Д, только документация СП-01Б-24-108 (ГШФЮ.654116) Сервопривод СП-01Б-XX-XXX Техническое описание Сервоприводы серии СП-01Б выпускаются с использованием синхронных электродвигателей, планетарных редукторов, имеют в составе два бесконтактных энкодера (абсолютный 14-бит на выходном валу и инкрементальный 4096 отсчета на валу электродвигателя) для реализации алгоритма компенсации люфта, рекуперативный шунт для сброса энергии при торможении. Сервоприводы управляются современным контроллером, который осуществляет векторное управление полем синхронного электродвигателя, реализует двухконтурную систему управления для компенсации механического люфта, взаимодействует с внешними системами посредством ряда стандартных физических интерфейсов и протоколов.
Доступны варианты с разными передаточными числами от 108 до 178:1, разными максимальными угловыми скоростями и максимальными моментами от 25 Нм до 32 Нм. 1.1 Отрасли применения и примеры: • Авиапром. • Робототехника. • Конверсия пилотируемых ЛА в БПЛА. • Оснащение пилотируемых ЛА системами ав СП-02Б-24-150_ТБДР.654116.30ГЧ СП-02Б-XX-XXX [ТБДР.654116.30] Сервоприводы серии СП-02Б выпускаются с использованием синхронных электродвигателей, планетарных редукторов, имеют в составе два бесконтактных энкодера (абсолютный 14-бит на выходном валу и инкрементальный 4096 отсчета на валу электродвигателя) для реализации алгоритма компенсации люфта, рекуперативный шунт для сброса энергии при торможении.
Сервоприводы управляются современным контроллером, который осуществляет векторное управление полем синхронного электродвигателя, реализует двухконтурную систему управления для компенсации механического люфта, взаимодействует с внешними системами посредством ряда стандартных физических интерфейсов и протоколов. Доступны варианты с разными передаточными числами от 83 до 150:1, разными максимальными угловыми скоростями и максимальным моментом до 6 Нм. 1.1 Отрасли применения и примеры: • Авиапром. • Робототехника. • Конверсия пилотируемых ЛА в БПЛА. • Оснащение пилотируемых ЛА системами автопилота. UV01.654116.51.000ВО Linear Servo Actuator SDLM-04B Сервоприводы серии СП-02Б выпускаются с использованием синхронных электродвигателей, планетарных редукторов, имеют в составе два бесконтактных энкодера (абсолютный 14-бит на выходном валу и инкрементальный 4096 отсчета на валу электродвигателя) для реализации алгоритма компенсации люфта, рекуперативный шунт для сброса энергии при торможении.
Сервоприводы управляются современным контроллером, который осуществляет векторное управление полем синхронного электродвигателя, реализует двухконтурную систему управления для компенсации механического люфта, взаимодействует с внешними системами посредством ряда стандартных физических интерфейсов и протоколов. Доступны варианты с разными передаточными числами от 83 до 150:1, разными максимальными угловыми скоростями и максимальным моментом до 6 Нм. 1.1 Отрасли применения и примеры: • Авиапром. • Робототехника. • Конверсия пилотируемых ЛА в БПЛА. • Оснащение пилотируемых ЛА системами автопилота. • Испольнительные механизмы для БПЛА и других типов беспилотной техники.
1.2 Общие характеристики серии: • Тип разъема: одна или две герметичные вилки Fischer Ultimate UR01-W-L-07-F-005-C-BK-1-E-2-A-B (5-контактов) (ответная кабельная часть: UP01-W-L-07-M-005-C-BK-1-E-2-Z-B) Опциональный вариант: Fischer Ultimate UR01-W-L-07-F-007-S-BK-1-E-2-A-B (7-контактов) (ответный разъем: UP01-W-L-07-M-007-S-BK-1-E-2-Z-B), либо две герметичные вилки UR01-W-L-07-F-005-C-BK-1-E-2-A-B (5-контактов). Возможны другие типы разъемов по согласованию с заказчиком. • Анодированный авиационный алюминий. • Тип крепления: промежуточный кронштейн. Основные телеметрийные данные с контроллера сервопривода: • Текущая абсолютная позиция и скорость. • Текущее значение тока в обмотках электропривода и напряжение шины питания.
• Температура силового каскада контроллера и температура статора электропривода. • Контроль влажности внутри корпуса. Тип : СП-02Б Редакция. No. : 7 Дата : Редакция. Дата : 14.03.2023 «ООО Тайбер» «СП-02Б» 2 1.3 Основные технические характеристики привода СП-02Б-24-150: Параметр Значение Номинальное напряжение 24 В Абсолютный диапазон входного напряжения 9 – 52 В Рекомендуемый рабочий диапазон напряжения1 12 В – 50 В Ток покоя при номинальном напряжении 0.12 A Номинальный ток при номинальном напряжении 2.277 A Пиковый ток при номинальном напряжении 3.12 A Номинальный момент при номинальной скорости2 4.3 Нм Переменный момент3 5.3 Нм Пиковый момент при номинальном напряжении4 6 Нм Номинальная скорость при номинальном моменте 278 °/сек Ограничения по рабочему сектору нет ограничений по рабочему сектору Диапазон рабочих углов ≤ 360° Механический люфт ≤ 0,6° Ошибка позиции в пределах рабочего температурного диапазона ≤ 0,1° Рабочий температурный диапазон (температура среды) -40°C … +60°C Температурный диапазон хранения -40°C … +90°C Вес, включая ответный разъем 480 g ±10% Степень защиты от воздействия среды IP66 Габаритные размеры, не более 140 мм x 89 мм x 36 мм Управляющий интерфейс RS485; CANaerospace (рекомендуется) 1 Диапазон входного напряжения, обеспечивающий запас электрической прочности, включая возможные допуски внешнего источника питания и гарантирующий оптимальную работу контура скорости и позиции во время ускорения и торможения.
Если используется встроенный рекуперативный шунт, верхний предел рабочего диапазона напряжения должен быть на 2-3 вольта меньше чем значение заданное в регистре ‘Shunt enable voltage’!!!. Значение в регистре ‘Shunt enable voltage’ по умолчанию равно 56 VDC. 2 Крутящий момент, создающий максимально возможную продолжительную нагрузку на выходной вал; превышение этого значения резко уменьшает срок эксплуатации. 3 Крутящий момент в циклическом режиме работы (скважность рабочего цикла не более 25 %). 4 Абсолютный максимальный крутящий момент, создаваемый редуктором сервопривода, при однократных и случайных нагрузках на выходном валу. Данные нагрузки не должны возникать циклически.
Редуктор сервопривода может выдать данный момент от нескольких сотен до нескольких тысяч раз без механического повреждения. Тип : СП-02Б Редакция. No. : 7 Дата : Редакция. Дата : 14.03.2023 «ООО Тайбер» «СП-02Б» 3 2 Механическая характеристика сервопривода СП-02Б-24-150 3 Интерфейс # Интерфейс Описание интерфейса 1 CANaerospace Физический уровень – CAN; Протокол – описание в приложении. 2 RS485 ICD Физический уровень RS485 полудуплекс Скорость обмена и формат 115200 бит/c (количество бит данных – 8; количество стоп битов – 1; бит паритета - отсутствует) Макс. частота кадров 100 кадров/c Среда настройки и обновления Servomotor Studio Протокол связи ICD (Interface Control Data) Тип : СП-02Б Редакция.
No. : 7 Дата : Редакция. Дата : 14.03.2023 «ООО Тайбер» «СП-02Б» 4 4 Подключение Подключите бортовой кабель CAN с ответным разъемом Fischer UR01-W-L-07-F-005-C-BK-1-E-2-A-B (UP01-W-L-07-M-007-S-BK-1-E-2-Z-B) к разъему MAIN сервопривода СП-02Б. Соблюдайте полярность подключения для изделий без встроенной защиты от обратной полярности. Назначение контактов разъема MAIN Подключите отладочный кабель RS485 с ответным разъемом Fischer UR01-W-L-07-F-005-C-BK-1-E-2-A-B (UP01-W-L-07-M-007-S-BK-1-E-2-Z-B) к разъему AUX сервопривода СП-02Б. Соблюдайте полярность подключения для изделий без встроенной защиты от обратной полярности. Назначение контактов разъема AUX Вид на вилку сервопривода со стороны ответной розетки № Цепь Описание 1 CAN1L L-сигнал CAN 2 CAN1H H-сигнал CAN 3 GND Силовая (сигнальная) земля 4 + V DC Питающее напряжение 5 PE Корпус № Цепь Описание 1 RS485B Инвентированная линия RS485 2 RS485A Неинвентированная линия RS485 3 GND Силовая (сигнальная) земля 4 + V DC Питающее напряжение 5 PE Корпус Тип : СП-02Б Редакция.
No. : 7 Дата : Редакция. Дата : 14.03.2023 «ООО Тайбер» «СП-02Б» 5 5 Каталожный номер СП-02Б-24-150-Р-РС85-Ф05 Тип разъема Класс Ф05 = Fischer Ultimate 005 Ф05x2 = 2 x Fischer Ultimate 005 РС85 = RS485 ICD C = CAN ICD CO = CANopen E = EtherCAT СП-01Б СП-02Б Интерфейс Напряжение 18 = 18 VDC 24 = 24 VDC 36 = 36 VDC 48 = 48 VDC Редукция Рекуперативный шунт Р = Рекуперативный шунт 83 = приложение рис. а 103 = приложение рис. б 111 = приложение рис. с 138 = приложение рис. д 150 = текущий вариант Тип : СП-02Б Редакция. No. : 7 Дата : Редакция. Дата : 14.03.2023 «ООО Тайбер» «СП-02Б» 6 6 Наработка до отказа (живучесть сервопривода) Наработка сервопривода до отказа зависит от совокупности таких условий эксплуатации как температура окружающей среды, характер нагрузки на выходном валу, вибрации и других условий.
Для разных компонентов сервопривода величина наработки существенно отличается и составляет: • для контроллера сервопривода - несколько сотен тысяч часов • для синхронного электродвигателя – десятки тысяч часов • для планетарного редуктора – тысячи часов. Тип : СП-02Б Редакция. No. : 7 Дата : Редакция. Дата : 14.03.2023 «ООО Тайбер» «СП-02Б» 7 Приложение Рисунок а – Механическая характеристика СП-02Б-24-83 (155 мм, 520 г) Рисунок б – Механическая характеристика СП-02Б-24-103 (155 мм, 520 г) Тип : СП-02Б Редакция. No. : 7 Дата : Редакция. Дата : 14.03.2023 «ООО Тайбер» «СП-02Б» 8 Рисунок с – Механическая характеристика СП-02Б-24-111 (155 mm, 520 г) Рисунок д – Механическая характеристика СП-02Б-24-138 (155 мм, 520 г) .
Характеристики учебной работы
 МАДИ
МАДИСписок файлов

 EcoTime Inc.
EcoTime Inc.Комментарии
Отзывы на другие работы автора