Курсовая работа: Механизмы
Описание
РЕФЕРАТ
Содержит 22 с., 3 рис., 5 табл., 4 источника, 4 чертежа.
Объектом изучения являются: плоский рычажный механизм в заданном положении; плоский зубчатый механизм вращательного действия; кинематическая схема реальной машины.
Цель курсовой работы – изучение методов исследования структурных, геометрических, кинематических и динамических свойств механизмов различных групп.
В курсовой работе выполнен структурный анализ, определена подвижность механизма, простроен план положения механизма, рассчитаны скорости, ускорения точек и звеньев механизма, силы и моменты сил плоского рычажного механизма.
Подсчитаны делительные диаметры зубчатых колес и межосевые расстояния, передаточные отношения отдельных пар зубчатых колес и механизма в целом, общий КПД зубчатого механизма, найдены значение мощности на выходном валу, подобран электрический двигатель, начерчен рабочий чертеж зубчатого колеса.
Подобран электрический двигатель для машины, рассчитаны угловые скорости и крутящие моменты сил на валах, диаметры валов под зубчатые колеса.
МЕХАНИЗМЫ РАЧАЖНЫЙ, ЗУБЧАТЫЙ, СКОРОСТИ, УСКОРЕНИЯ, СИЛЫ, РЕАКЦИИ, ДВИГАТЕЛЬ, ДИНАМИЧЕСКИЙ АНАЛИЗ МАШИНЫ.
СОДЕРЖАНИЕ
1 Задача № 1. СТРУКТУРНЫЙ И КИНЕМАТИЧЕСКИЙ АНАЛИЗ ПЛОСКОГО РЫЧАЖНОГО МЕХАНИЗМА.. 4
1.2 Структурный анализ плоского механизма. 4
1.3 План положения механизма. 5
1.4 Построение планов скоростей и ускорений. 5
1.5 Составление схемы нагружения механизма. 8
1.6 Определение уравновешивающей силы и момента сил. 9
1.7 Расчеты реакции в кинематических парах механизма. 9
2.2 Начальные диаметры и межосевые расстояния. 10
2.3 Расчеты подвижности и передаточных отношений механизма. 11
2.4 Угловые скорости и угловые ускорения звеньев. 11
2.5 Расчет КПД и выбор двигателя зубчатого механизма. 12
2.6 Расчет размеров зубчатых колес и сил в зацеплении. 12
2.7 Расчет элементов зубчатого колеса. 14
2.8 Расчет шпоночного соединения. 15
3 Задача №3. ДИНАМИЧЕСКИЙ АНАЛИЗ КИНЕМАТИЧЕСКОЙ СХЕМЫ МАШИН.. 17
3.2 Мощность двигателя машины.. 17
3.3 Передаточные отношения формовочной машины.. 18
3.4 Угловая скорость и крутящие моменты.. 19
3.5 Проектировочные диаметры валов машины.. 19
3.6 Выбор муфт привода машины.. 20
1 Задача № 1. СТРУКТУРНЫЙ И КИНЕМАТИЧЕСКИЙ АНАЛИЗ ПЛОСКОГО РЫЧАЖНОГО МЕХАНИЗМА
1.1 Исходные данные
Дано: кинематическая схема плоского рычажного механизма на (рис. 1.1);
угол положения ведущего звена кривошипа φ = 120° ;
угловая скорость кривошипа ω = 45 с -1 ;
длина кривошипа ℓАВ = 0,045 м;
ℓAС = 3,5∙ℓAB; ℓCD = 5∙ℓAB; ℓCE = 2∙ℓAB; ℓEH = 4∙ℓAB.
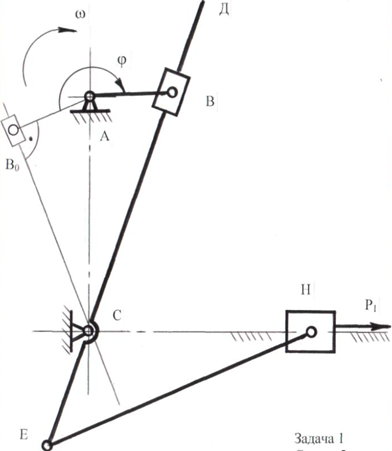
Рисунок 1.1 – Кинематическая схема рычажного механизма
2 Задача №2. КИНЕМАТИЧЕСКОЕ ИССЛЕДОВАНИЕ ЗУБЧАТОГО ПОВОДА И ГЕОМЕТРИЧЕСКИЙ СИНТЕЗ ЗУБЧАТОГО ЗАЦЕПЛЕНИЯ
2.1 Исходные данные
Дано: кинематическая схема (рис. 2.1);
модуль зацепления m = 5 мм;
число зубьев Zi колес механизма Z1=17, Z2=49, Z3=17, Z4=21, Z5=21, Z6=22;
угловая скорость ω1=95 с-1;
угловое ускорение ε1=9 с-2;
вращающийся момент Т1=25 Нм
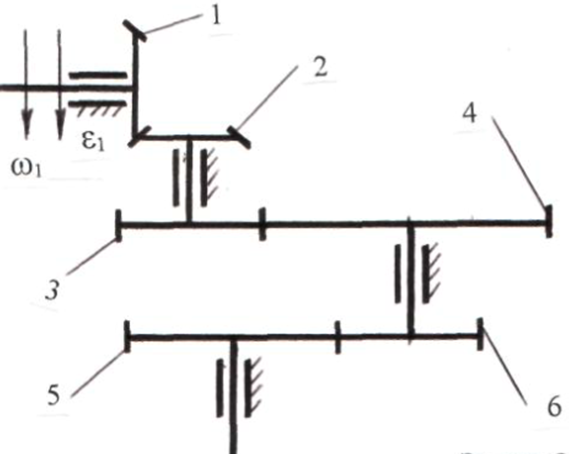
Рисунок 2.1 – Кинематическая схема зубчатого механизма
3 Задача №3. ДИНАМИЧЕСКИЙ АНАЛИЗ КИНЕМАТИЧЕСКОЙ СХЕМЫ МАШИН
3.1 Исходные данные
Дано: кинематическая схема машины (рис. 3.1);
мощность на исходном валу машины Р3 = 11 кВт;
угловая скорость исходного вала ω3 = 7 с-1.
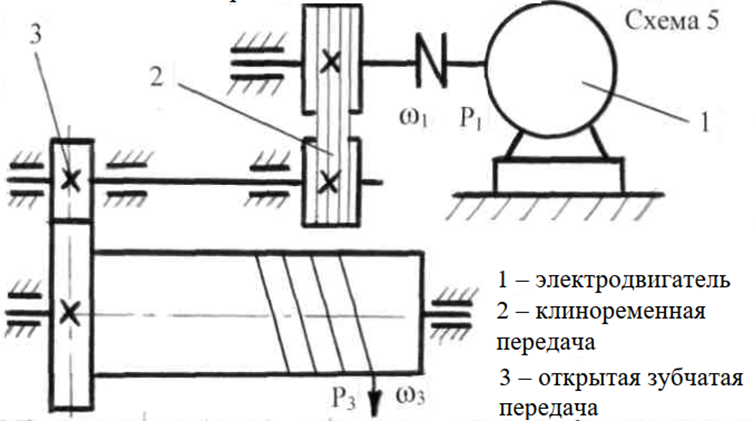
Рисунок 3.1 – Кинематическая схема привода тягового механизма
 all_at_700
all_at_700

















