Курсовая работа: Динамический расчет системы автоматического управления - Вариант 27 вариант 27
-60%
Описание
Аннотация.
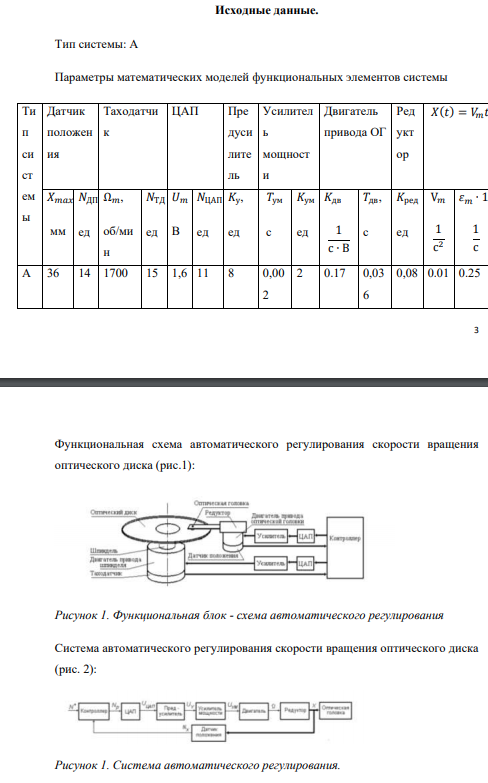
Выполнение научно – исследовательской работы основывается на динамическом расчете контура управления и стабилизации угловой скорости шпинделя оптического диска контура автоматического позиционирования ОГ. В ходе выполнения данного анализа необходимо сформировать функциональную блок-схему системы автоматического регулирования позиционирования оптической головки , и, пренебрегая нелинейностями характеристик функциональных элементов системы и дискретным характером процессов в отдельных точках системы, сформировать линейные модели элементов ее неизменяемой части и вычислить числовые значения параметров этих модулей с учетом требуемых условий. Также необходимо определить передаточные функции элементов системы и составить структурную схему системы с учетом управляющего воздействия. Исходную структурную схему преобразуем к эквивалентной с единичной обратной связью методом структурных преобразований. Определим передаточные функции разомкнутой, замкнутой системы и передаточную функцию ошибки по управляющему воздействию. По полученным передаточным функциям необходимо построить дифференциальные уравнения системы и получить выражения характеристических полиномов для системы в разомкнутом и замкнутом состояниях. Проанализировать также устойчивость неизменяемой системы, используя алгебраический критерий Гурвица и частотный критерий Найквиста. Также определим показатели динамического качества и статической точности по реакциям системы на тестовые ступенчатое и линейно возрастающее входное воздействие.![]()
![]()
Выполнение научно – исследовательской работы основывается на динамическом расчете контура управления и стабилизации угловой скорости шпинделя оптического диска контура автоматического позиционирования ОГ. В ходе выполнения данного анализа необходимо сформировать функциональную блок-схему системы автоматического регулирования позиционирования оптической головки , и, пренебрегая нелинейностями характеристик функциональных элементов системы и дискретным характером процессов в отдельных точках системы, сформировать линейные модели элементов ее неизменяемой части и вычислить числовые значения параметров этих модулей с учетом требуемых условий. Также необходимо определить передаточные функции элементов системы и составить структурную схему системы с учетом управляющего воздействия. Исходную структурную схему преобразуем к эквивалентной с единичной обратной связью методом структурных преобразований. Определим передаточные функции разомкнутой, замкнутой системы и передаточную функцию ошибки по управляющему воздействию. По полученным передаточным функциям необходимо построить дифференциальные уравнения системы и получить выражения характеристических полиномов для системы в разомкнутом и замкнутом состояниях. Проанализировать также устойчивость неизменяемой системы, используя алгебраический критерий Гурвица и частотный критерий Найквиста. Также определим показатели динамического качества и статической точности по реакциям системы на тестовые ступенчатое и линейно возрастающее входное воздействие.
Характеристики курсовой работы
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаВариант
Теги
Просмотров
40
Размер
765,6 Kb
Список файлов
Курсовая работа На тему Динамический расчет системы автоматического управления -Вариант 27.pdf

Друзья, спасибо за доверие! Если вам понравилась работа – поставьте 5⭐ и напишите отзыв. Это поможет другим студентам, а мне даст силы делать ещё больше качественных материалов для вас 🔥
 anhyeuem
anhyeuem
17 марта 2021 в 13:45
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!
Отзывы на другие работы автора
Отзыв
ДМ1519 - Проектирование привода цепного транспортера с двухступенчатым цилиндрическим редуктором выполненным по развернутой схеме
Есть недочёты, хорошо подходит как база для выполнения аналогичного варианта курсача

Отзыв
Сборочная размерная цепь + Подетальная размерная цепь
Были замечания, но автор все быстро исправил, теперь все отлично.

Отзыв
Плоская и пространственная статика
Есть небольшая путаница с углами из условий, которая может влиять на численный ответ, и подобные мелкие ошибки, в остальном всё хорошо

Отзыв
Кратные и криволинейные интегралы
есть ошибка в 5 номере и преподаватели уже начинают палить что эта работа списана

Отзыв
Отчет по производственной практике - Композиционные материалы - Предприятие НИИ СМ МГТУ им. Н.Э. Баумана
Спасибо! Изложение краткое и конструктивное, лишней информации нет. Помогло при составлении отчета




















