63438 (588934), страница 3
Текст из файла (страница 3)




h0
h0


C1
C2
а-а


Рис.10 Ємнісний перетворювач переміщень
Ємності між відповідними парами електродів визначаються за формулами:

 ;
;  ; (1)
; (1)
де -  - діелектрична проникливість між електродами;
- діелектрична проникливість між електродами;  (Ф/м);
(Ф/м);  - площа взаємного перекривання електродів;
- площа взаємного перекривання електродів;  - зміщення рухомого електроду;
- зміщення рухомого електроду;  - початковий зазор між електродами.
- початковий зазор між електродами.
Із залежності (1) випливає, що кожний з параметрів приводить до змінення параметрів ємнісного перетворювача. Щоб запобігти впливу площі перекриття площу рухомого електроду роблять меншою, ніж площу нерухомого. Слід мати на увазі, що між кожною парою електродів є силова взаємодія, яка визначається за формулою:
 i=1,2 , (2)
i=1,2 , (2)
де  - електричні заряди на електродах.
- електричні заряди на електродах.
Також вплив має і параметр , вплив котрого запобігається в електронній схемі. Вимірювальна схема з ємнісними перетворювачами переміщень повинна задовольняти таким умовам [1]:
-
Лінійність статистичної характеристики у всьому діапазоні вимірювання.
-
Відсутність впливу діелектричної проникливості середовища, яким заповнено простір між вимірювальними електродами перетворювача.
-
Достатня фільтрація вихідного сигналу від несучої частоти генератора, до якого включений ємнісний міст.
-
Виключення впливу тяжіння між рухомими і нерухомими електродами ємнісного моста.
-
Мінімальна кількість схемних елементів.
Найбільш підходящою схемою по вимогам, є схема на рис.11.
q
Кл2
Кл1







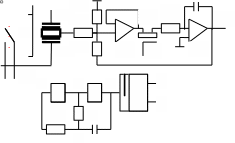
Рис.11. Принципова схема ємнісного перетворювача
Час роботи перетворювача можна розділити на два такти: перший такт підготовки, під час якого заряджається заряд вимірювальних конденсаторів від джерела опірних напруг. Ключ синхронного детектора Кл1 замкнений, а інтегратор виконує функцію аналогового запам’ятовуючого осередку [5]. Другий такт – вимірювальний, під час якого виконується перезаряд вимірювальних ємностей, ключ синхронного детектора розімкнений, що призводить до подачі сигналу на вхід інтегратора та кола зворотнього зв’язку. Два плеча ємнісного моста представляють диференційні вимірювачі ємності С1, С2, а два інших плеча- джерела опірної напруги  та
та  .
.
В ихідний опір вимірювальної діагоналі ємнісно-резисторного моста є високоомним, а рівень корисного сигналу після моста недостатній для подальшої обробки [5]. В зв’язку з цим міст доповнений повторювачем заряду на операційному підсилювачі (Оп1), який одночасно виконує функцію трансформування високого опору у низький та порівняння сигналів моста та кола зворотного зв’язку. Резистори суматора зроблені однаково і мають однаковий опір (R1=R2).
ихідний опір вимірювальної діагоналі ємнісно-резисторного моста є високоомним, а рівень корисного сигналу після моста недостатній для подальшої обробки [5]. В зв’язку з цим міст доповнений повторювачем заряду на операційному підсилювачі (Оп1), який одночасно виконує функцію трансформування високого опору у низький та порівняння сигналів моста та кола зворотного зв’язку. Резистори суматора зроблені однаково і мають однаковий опір (R1=R2).
Рис.12. Структурна схема ємнісного перетворювача
Відповідно до структурної схеми (рис.12) повна передатна функція перетворювача має вигляд:
 (3)
(3)
де  - статистичний коефіцієнт передачі перетворювача;
- статистичний коефіцієнт передачі перетворювача;  - стала часу інтегратора; s –оператор Лапласа.
- стала часу інтегратора; s –оператор Лапласа.
Інтегратор виконує дві функції. По-перше - він придає порядок астатизму перетворювачу, в результаті чого температурний дрейф електронних вузлів прямого кола охоплений зворотнім зв’язком, не впливає на точність перетворення. По-друге в підготовчому такті разом із ключем синхронного детектора він виконує функцію аналогового запам’ятовуючого осередку результату перетворення на попередньому такті. При s=0 з виразу (3) одержуємо, що напруга на виході вимірювальної схеми дорівнює:
 . (4)
. (4)
З формули (4) випливає, що основними причинами температурної похибки вимірювального кола є нестабільність джерела опорної напруги та нестабільність зазору між електродами.
Температурну похибку можна визначити за формулою:
![]() (5)
(5)
де  - температурний коефіцієнт напруги стабілізатора;
- температурний коефіцієнт напруги стабілізатора;  - температурний коефіцієнт матеріалу який впливає на змінення зазору.
- температурний коефіцієнт матеріалу який впливає на змінення зазору.
Температурний коефіцієнт напруги стабілізатора приблизно на порядок перевищує величину інших похибок. В якості одного з способів підвищення точності ємнісного перетворювача є вибір стабілізатора, знак температурного коефіцієнта напруги якого не співпадає зі знаком температурного коефіцієнта змінення початкового зазору.
Для діапазону температур (-60 …+80) ![]() сумарна відносна похибка складає
сумарна відносна похибка складає ![]() % від діапазону вимірювання.
% від діапазону вимірювання.
4.Структура та принцип функціонування мікро механічних акселерометрів
4.1. Загальні принципи побудови
О
А-А
дин з перших кремнієвих акселерометрів був виконаний по схемі, наведеній на рис. (13) [5]. 

А
А
Рис. 13 Принципова схема балочного акселерометра
Д
Г1
іапазон вимірювання прискорень від 0,1 до 500 м/с2, а частотний діапазоні від 0 до 100 Гц. Блок-схема чутливого елемента з частотним виходом представлена на рис. 14, чутливий елемент складається з двох маятників кожний з яких підвішений на трьох пружних перемичках [5]. ` 


f
C2
C1

СМ
а



Г2
Рис.14 Блок-схема розімкнутого акселерометра з частотним виходом
Номінальний зазор складає 0,039 мм. Маятники складають дві ємності С1 і С2 з електродами, встановленими на корпусі приладу. Обкладки ємностей включені таким чином, що при дії прискорення зазор в одному конденсаторі збільшується а в другому зменшується.
Кожна ємність включена до складу контура генераторів Г1 та Г2. Частота одного генератора зменшується а другого збільшується. Сигнали від кожного генератора складаються за допомогою змішувача ЗМ, а різницева частота цих сигналів і є вихідним сигналом акселерометра. Така схема акселерометра дозволяє виключити додаткові деталі на маятниках і значно спростити конструкцію чутливого елементу.
За вимірюванням різницевих частот двох генераторів можна визначити прискорення. На рис.15 приведена залежність вихідного сигналу акселерометра від величини діючого прискорення.

Рис.15. Залежність вихідного сигналу від діючого прискорення
При розробці даного типу акселерометра довелось зіткнутися з цілим рядом проблем: явищем самосинхронізації частот двох генераторів, досить значною залежністю вихідного сигналу акселерометра від величини напруги живлення та температури навколишнього середовища. Для компенсації всіх цих похибок розробниками вводилось алгоритмічна компенсація всіх похибок.
По схемі балочного акселерометра випускаються прилади типу АТ1101 та АТ1105.
Ш
А-А
ироко застосовується підвіс маятника по схемі рис. 16. З таким підвісом маятника можуть працювати, як кутові акселерометри так і лінійні акселерометри при зміщенні центру мас маятника відносно осі пружних перемичок. 

а

А


А
Рис.16. Гібридний акселерометр компенсаційного типу (схема підвісу)
Маятником може слугувати як внутрішня, так і зовнішня пластина. Акселерометр має гібридну конструкцію – датчик моменту контуру зворотнього зв’язку виконаний по традиційній технології і має нерухомий постійний магніт та обмотку на маятнику. На маятнику напилені електроди, які є загальною обкладкою ємнісного датчика переміщень маятника, а два інших електрода напилені на корпусі приладу. Зазор між маятником та електродами на корпусі складає 0,021 мм. Для збільшення маятниковості встановлений груз.
Акселерометр має встрояну електроніку зворотнього зв’язку, виконану на основі гібридно-плівчатої технології. Акселерометри були виготовлені для застосування в керуючих боєприпасах з діапазоном вимірювання від 100g до 100000g а також для комерційних цілей з діапазоном вимірювання прискорень (0,1-1,5)g.
Блок-схема акселерометра наведена на рис.17. Блок-схема складається з задаючого генератора ЗГ, двох підсилювачів У1 та У2, двох випрямлювачів В1 та В2, диференційного підсилювача ДУ, датчика моменту ДМ, та еталонного опору Rе з якого знімається вихідний сигнал.

R
У1
В1

+
ДУ
-
ЗГ
ДМ
ак


Uвих

R
У2
В2
Rе
маятник
Рис.17. Блок-схема акселерометра
Даний тип акселерометра випускається в декількох модифікаціях (А-12, А-15, А-16), в залежності від конкретного застосування. Ці акселерометри встановлюються в карданні та безкарданні системи.
Основним недоліком описаного приладу є складність конструкції чутливого елементу.
Акселерометр з встрояною електронікою витримує удари до 50g та має наступні характеристики:
- діапазон вимірювальних прискорень ![]() ;
;
- масштабний коефіцієнт ![]() ;
;
- нестабільність масштабного коефіцієнта ![]() ;
;
- дрейф нульового сигналу на протязі однієї години ![]() ;
;
















