Математические методы принятия решения в системах технической диагностики и контроля
2.2 Математические методы принятия решения в системах технической диагностики и контроля
Для диагностирования устройств ЖАТ используют два основных метода: комбинационный и последовательный.
При комбинационном методе на определенные входы объекта подают соответствующие электрические сигналы с последующей регистрацией характера выходных сигналов. Сравнением полученных выходных сигналов с теми, которые должны быть, судят об исправности данного блока, узла или подсистемы. Такой метод применяется при проверке блоков на специальных стендах.
Последовательный метод используют при наличии факта отказа и неисправности. Различают такие разновидности этого метода как внешний осмотр, замена неисправных элементов и измерение параметров. Для наиболее рациональных поиска и устранения неисправностей используют последовательный перебор, при котором поочередно проверяют все элементы схемы. Для оптимизации процесса проверки в качестве критерия наиболее рациональной последовательности проверок выбирают отношение ti/Pi, где ti- время необходимое для проверки и устранения неисправности; Pi- вероятность возникновения данной неисправности. Проверку начинают с минимального значения этого соотношения.
К последовательному относится и метод «средней точки», который имеет несколько разновидностей, различающихся по количеству элементов и вероятностям отказов. Суть его состоит в разделении всех элементов системы на группы. Каждая из групп последовательно делится на два по количеству элементов и, таким образом, локализуется место возникновения неисправности. Существуют и вероятностные подходы к реализации этих методов [33].
Анализ приведенных методов диагностирования показал неэффективность их применения к внедряемым на сети железных дорог усовершенствованным системам ЖАТ, реализованных на электронной элементной базе с использованием микропроцессоров.
Большинство систем строятся с использованием микропроцессоров, цифровых и аналоговых сборок. Высокая степень интеграции снижает достоверность и глубину оценки состояния устройства при помощи измерения параметров на доступных выводах, затрудняет определение степени влияния на диагностируемый модуль смежных с ним узлов. В силу огромного числа состояний дискретных устройств («проклятия размерности») невозможно произвести их полный перебор. Экспертная оценка электромехаников, выполняющих проверку, не всегда достоверна вследствие присутствия человеческого фактора, недостаточной квалификации. В связи с этим, для диагностики современных систем ЖАТ необходимо использовать самоорганизующиеся методы принятия решений.
Перспективным направлением для развития отвечающим этим требованиям СТД, является использование теории искусственных нейронных сетей (ИНС) и метода группового учета аргументов МГУА [34]. Анализ архитектур различных нейронных сетей и алгоритмов, применение которых целесообразно в системах диагностики и контроля СЖАТ, позволяет разбить их на следующие категории (рис.2.4).
В иностранной литературе такое направление получило название «теория искусственных нейронных сетей» (Neural Networks Theory). Любая подобная структура может рассматриваться как направленный граф со взвешенными связями [35].
Одной из разновидностей многослойных ИНС является сеть, построенная на основе методики МГУА (метод группового учета аргументов) [38]. Существует несколько разновидностей таких структур. Нейронная сеть позволяет на основе обучающей выборки построить зависимость одного параметра от других в виде полинома и найти скрытые зависимости в данных. Важнейшим фактором в процессе принятия решения здесь является выбор класса опорных функций.
Рекомендуемые материалы
Иерархия методов теории искусственных нейронных сетей
Информация в лекции "7 Церковь на Западе в 1-5 вв" поможет Вам.
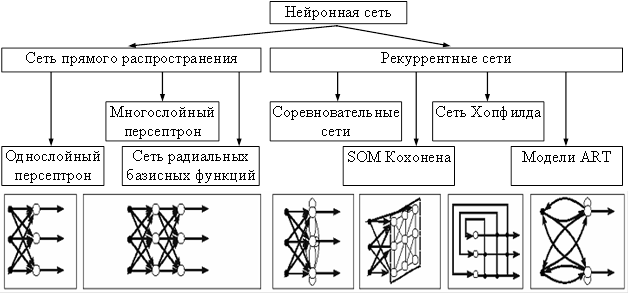
Рис.2.4
Существуют три парадигмы обучения: "с учителем", "без учителя" (самообучение) и смешанная. В первом случае нейронная сеть располагает правильными ответами (выходами сети) на каждый входной пример. Веса настраиваются так, чтобы сеть выдавала ответы как можно более близкие к известным правильным ответам. Усиленный вариант обучения с учителем предполагает, что известна только критическая оценка правильности выхода нейронной сети, но не сами правильные значения выхода.
Обучение без учителя не требует знания правильных ответов на каждый пример обучающей выборки. В этом случае раскрывается внутренняя структура данных или корреляции между образцами в системе данных, что позволяет распределить образцы по категориям. При смешанном обучении часть весов определяется посредством обучения с учителем, в то время как остальная получается с помощью самообучения.
Известны четыре основных типа правил обучения: коррекция по ошибке, машина Больцмана, правило Хебба и обучение методом соревнования. При обучении с учителем для каждого входного примера задан желаемый выход d. Реальный выход сети y может не совпадать с желаемым. Принцип коррекции по ошибке при обучении состоит в использовании сигнала (d-y) для модификации весов, обеспечивающей постепенное уменьшение ошибки. Обучение имеет место только в случае, когда персептрон ошибается. Известны различные модификации этого алгоритма обучения [35].