
Основные требования к методам наведения
Основные требования к методам наведения .
1. должен обеспечивать наименьшую кривизну кинематической траектории на всех участках полета ракеты и особенно в районе точки встречи . Характер кинематической траектории определяет так называемые кинематические перегрузки ракеты (nк) , т.е. перегрузки , которые должна выдерживать ракета при полете по этой траектории . Величина (nк) , при заданных параметрах движения цели и скорости ракеты – функция методов наведения .
2. должен обеспечивать встречу ракеты с целью во всем диапазоне (заданном) скоростей , высот и курсовых параметров ее движения .
3. должен обеспечивать требуемую точность движения ракеты с целью в различных условиях среды .
4. должен обеспечивать простоту , в смысле его приборной реализации . Однако это требование всегда подчинено требованиям тактической задачи (п.1 , п.2 , п.3) .
Нам нужно так организовать движение точки “р” при произвольном движении точки “C” , чтобы эти две точки математически точно совместились .
Из всех существующих методов наведения можно выделить :
§ метод погони ;
§ метод трех точек ;
Рекомендуемые материалы
§ метод параллельного сближения ;
§ комбинированный метод .
 Метод погони .
Метод погони .
Это такой метод наведения (рис.52) , при котором требуемое движение ракеты определяется условием : в течении всего времени полета вектор скорости ракеты направлен на цель .

Метод трех точек .
Это такой метод наведения (рис.53) , при котором требуемое движение ракеты определяется условием : ракета в течении всего времени полета к цели , должна находится на прямой соединяющей пункт наведения с целью .
Метод параллельного сближения .
![]() Это такой метод наведения , при котором линия “ракета-цель” в течении всего времени полета ракеты остается параллельной самой себе .
Это такой метод наведения , при котором линия “ракета-цель” в течении всего времени полета ракеты остается параллельной самой себе .
 Это такой метод наведения , при котором линия “ракета-цель” в течении всего времени полета ракеты остается параллельной самой себе .
Это такой метод наведения , при котором линия “ракета-цель” в течении всего времени полета ракеты остается параллельной самой себе .φ – угол места (азимута) линии “ракета-цель” .
Комбинированный метод .
Совокупность первых трех методов наведения (рис.55).
"17 Пуск двигателя с фазным ротором с помощью пускового реостата" - тут тоже много полезного для Вас.
Сначала метод 2 , потом метод 3 .
Для любого из указанных методов можно установить следующую кинематическую зависимость .
Из рис.55 :
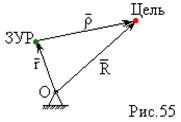

Возьмем произвольную по времени и получим :



















