
Динамический анализ рычажных механизмов
5. Динамический анализ рычажных механизмов
5.1. Классификация действующих сил
Среди сил, действующих на механизм, различают:
а) движущие силы Fд или моменты Mд, ускоряющие движение входных (начальных) звеньев и совершающие положительную работу. Например: силы давления газа на поршень в двигателе внутреннего сгорания, силы веса при опускании груза и т.д.
б) силы сопротивления Fc или моменты Мс, замедляющие движение входных звеньев и совершающие отрицательную работу. Они могут быть силами полезного сопротивления, дающими производственный эффект, и силами вредного сопротивления не дающими такого эффекта. К первому типу относятся например, силы тяжести при подъеме груза, а ко второму типу – силы трения.
в) силы реакции в кинематических парах Fij, возникающие в опорах звеньев и являющиеся внутренними силами для механизма в целом и внешними для каждого отдельного звена.
г) силы инерции Fи или моменты сил инерции Mи возникают при переменном движении звеньев механизма и могут быть как движущими, так и силами сопротивления (в зависимости от их направления относительно направления движения звеньев). Фактически эти силы действуют на тело, вызывающее ускорение другого тела. Однако, условное приложения сил инерции к ускоряемому телу позволяет рассматривать его в равновесии. Этот принцип – принцип Даламбера позволяет задачу динамики свести к статическому расчету.
Рекомендуемые материалы
 Силы инерции относятся к категории распределенных или так называемых массовых сил, которые как и другие аналогичные силы могут быть приведены к главному вектору и главному моменту (рис.21).
Силы инерции относятся к категории распределенных или так называемых массовых сил, которые как и другие аналогичные силы могут быть приведены к главному вектору и главному моменту (рис.21).
Fи =-mas; Mи=-JS·ε; где m и JS – масса и момент инерции звена относительно оси, про-ходящей через центр масс;
aS – ускорение центра масс;
ε – угловое ускорение звена.
Знаки (-) показывают, что направления Fи и Ми противоположны соответствующим ускорениям.
Сила Fи и момент Ми, могут быть заменены одной силой Fи/=Fи, линия действия которой проходит через так называемый центр качаний (точка К на рис.21) на оси звена и отстоит от линии действия Fи на расстоянии h=Ми/Fи при замене Ми парой сил Fи/.
5.2. Приведение сил и масс в механизме
Для исследования закона движения механизма его удобно заменить одним условным звеном – звеном приведения, имеющим закон движения аналогичного звена реального механизма.
Все внешние силы, действующие на звенья при этом заменяются одной приведенной силой F∑пр или моментом М∑пр , мощности Р∑пр которых равны мощностям Рi заменяемых сил Fi и моментов сил Mi, т.е.
Р∑пр=∑Рi, где Рi=Fi·Vi·cos(FiVi) или Рi=Мi·ωi;
Р∑пр=F∑пр·V·cos(F∑прV) или Р∑пр=М∑пр·ω.
Здесь Vi и V – скорости точек приложения соответствующих сил; ωi и ω – угловые скорости i-го звена и звена приведения.
Суммарную приведенную силу или момент удобно записывать в виде составляющих, например: М∑пр=∑МFiпр+∑ММiпр, где каждая составляющая определяется из соответствующего равенства мощностей:
МFiпр=Fi·Vi/ω·cos(FiVi) - для силы Fi;
 ММiпр=Мi·ωi/ω - для момента Мi;
ММiпр=Мi·ωi/ω - для момента Мi;
Пример кривошипно-ползунного механизма (рис.22): М∑пр=МFпр+MGпр,
где МFпр=F·VC/ω1=F·lAB·рс/pb;
 MGпр=G·VS/ω1·cos(G^VS)=G·lAB·ps/pb.
MGпр=G·VS/ω1·cos(G^VS)=G·lAB·ps/pb.
Здесь pb, pc, ps|=ps·cos(G^VS) – вектора, взятые с плана скоростей (рис.22).
Как видно из формул, величина Fпр (Мпр) зависит лишь от соотношения скоростей, а не от их абсолютной величины, что позволяет для приведения сил использовать планы скоростей без учета их масштабов. Каждое i-ое звено механизма обладает массой mi и моментом инерции Ji относительно оси, проходящей через центр масс звена, при этом кинетическая энергия i-го звена плоского механизма равна:
Ti=(mi·Vi2/2)+Ji·ωi2/2.
 Массы и моменты инерции всех звеньев механизма можно условно заменить некоторой массой mпр, сосредоточенной в произвольно выбранной точке А звена приведения (рис.23, а) или некоторым моментом инерции Jпр, приписанным звену
Массы и моменты инерции всех звеньев механизма можно условно заменить некоторой массой mпр, сосредоточенной в произвольно выбранной точке А звена приведения (рис.23, а) или некоторым моментом инерции Jпр, приписанным звену
Рис. 23 приведения (рис.23, б).
Замена должна производится из условия равенства кинетических энергий:
Тпр=Тмех=∑Тi,
где Тпр=mпр·VA2/2 или Тпр=Jпр·ω2/2,
т.е. mпр=∑[mi·(Vi/VA)2+Ji·(ωi/VA)2] – при поступательном движении звена приведения.
Jпр=∑[ mi·(Vi/ω)2+Ji·(ωi/ω)2] – при вращательном движении звена приведения.
mпр и Jпр являются функциями положения звена приведения, т.е. их величина может меняться при изменении положения звена в процессе его движения.
5.3. Уравнение движения машины
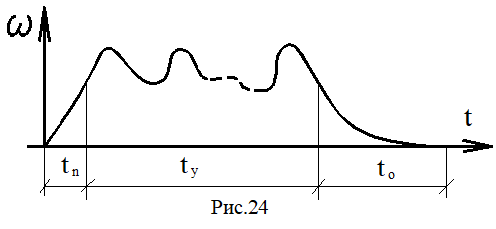
Работу машины можно разбить на 3 периода:
1) период пуска (разгон);
2) период установившегося движения;
3) период остановки (выбега);
 |
Аналитическая зависимость между действующими на звенья силами и кинематическими параметрами движения называется уравнением движения. Это уравнение в общем случае имеет вид ∆Т=Ад-Ас, где ∆Т=Т-Т0 – изменение кинетической энергии за рассматриваемый промежуток времени (Т и Т0 – величина кинетической энергии в конце и начале промежутка);
Ад-Ас – суммарная работа действующих сил за рассматриваемый промежуток (Ад, Ас – работа движущих сил и сил сопротивления).
В период пуска Ад-Ас=∆Т>0, т.е. происходит ускорение движения звеньев, являющегося неустановившемся.
В период установившегося движения Ад-Ас=∆Т=0, т.е. скорости звеньев в конечный и начальный моменты цикла равны и вся работа движущихся сил расходуется на преодоление сопротивлений.
В период остановки Ад-Ас=∆Т<0, движение продолжается некоторое время за счет накопленной кинетической энергии, поглощаемой за счет сопротивления движению.
Уравнение движения может быть выражено в интегральной и дифференциальной форме, а для упрощения его решения исследование машины заменяют исследованием звена приведения, в котором изменение кинетической энергии равно: ∆Tпр =Адпр-Аспр, где суммарная работа действующих на звено приведения сил может быть выражена:
а) в интегральной форме:
Адпр-Аспр=∫F∑прds или Адпр-Аспр=∫M∑прdφ;
б) в дифференциальной форме:
dTпр=M∑прdφ или M∑пр=dTпр/dφ;
т.е. при dTпр=1/2·Jпр·ω2 получим:
M∑пр=(dJпр/dφ)·(ω2/2)+Jпр·ω·(dω/dφ)·(dt/dt)=(dJпр/dφ)·(ω2/2)+ε·Jпр.
Таким образом, уравнение движения машины приводится к тому или иному конкретному виду и решается графическим и графоаналитическим методами, а учитываемые силы и моменты сил, а также приведенные массы и моменты инерции могут быть как постоянными так и переменными величинами, зависящими от того или иного фактора.
5.4. Понятие об уравновешивающей силе.
Теорема Жуковского о жестком рычаге
Одним из способов определения приведенной силы Fпр является способ, предложенный проф. Н.Е. Жуковским. Уравнение, из которого может быть найдена Fпр, основано на равенстве мощностей: F∑пр·VA·cos(F∑пр VA)=∑Fi·Vi·cos(Fi Vi).
 Рассмотрим какое-либо звено механизма, в т. В которого приложена сила Fi под углом αi к вектору скорости Vi этой точки (рис.25, а).
Рассмотрим какое-либо звено механизма, в т. В которого приложена сила Fi под углом αi к вектору скорости Vi этой точки (рис.25, а).
Мощность силы Fi равна:
Pi=Fi·Vi·cosαi.
Если вектор скорости т. В (план скоростей) повернуть на
Рис. 25 90˚ и силу Fi приложить к концу вектора (в т. «b»), сохранив ее направление, то момент этой силы относительно полюса «p» будет равен (рис.25, б): Mi=Fi·hi=Fi·Vi·cosαi=Pi,
т.е. равен мощности силы Fi. Таким образом, Fi можно найти, повернув на 90˚ план скоростей и приложив к нему все внешние силы, включая силы инерции, в соответствующих точках и сохраняя их направления. Тогда из уравнения моментов такого рычага:
F∑пр·hпр=∑Fi·hi, получим: F∑пр=∑Fi·hi/hпр, где hi и hпр – кратчайшие расстояния от полюса плана скоростей до линии действия i-ой и приведенной сил.
Повернутый на 90˚ план скоростей с приложенными к нему силами называется жестким рычагом Жуковского.
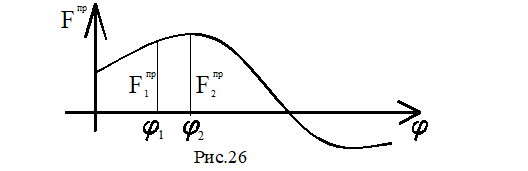
Величина Fпр или Мпр зависит от положения механизма, поэтому можно построить диаграмму, например, Fпр(φ), являющуюся функцией положения звена приведения. Для этого необходимо последовательно определить значения Fпр методом рычага Жуковского для целого ряда положений механизма в пределах цикла (F1пр, F2пр,…) и отложить их на диаграмме (рис.26).
Приведенная сила F∑пр или момент М∑пр характеризует реакцию механизма на движение его входного звена по определенному закону, задаваемому двигателем. Сила или момент, равные по величине приведенной силе или моменту, но противоположные им по направлению называется уравновешенной силой Fур или моментом Мур. Эта сила или момент развивается двигателем и обеспечивает заданное движение входного звена.
Если к рычагу Жуковского приложить все внешние силы, включая силы инерции, а также Fур, то его можно рассматривать в равновесии, из условия которого: Fур·hур+∑Fi·hi=0 можно определить неизвестную Fур, а также найти мощность двигателя Pдв, требуемую для получения заданного движения входного звена в заданном положении:
Pдв=Fур·VA·cos(FурVA)=Mур·ω.
5.5. Графоаналитический метод решения уравнения движения машины
Данный метод позволяет не только наглядно иллюстрировать связь между динамическими и кинематическими параметрами движения, но и решать практические задачи синтеза, например, задачу уменьшения неравномерности вращения звеньев.
В качестве примера рассмотрим построение так называемой диаграммы энергомасс. Эта диаграмма строится на основе графиков:
∆Тпр(φ)=Тпр(φ)-Т0пр(φ) и Jпр(φ),
причем график ∆Тпр(φ) может быть получен путем графического интегрирования графика Мпр(φ).
На рис.27 показана последовательность построения диаграммы энергомасс в координатах ∆Тпр(Jпр), которая при установившемся движении является замкнутой кривой и строится на базе диаграмм ∆Тпр(φ) и Jпр(φ) путем исключения параметра φ (φ – угол поворота звена приведения).
Если известна угловая скорость вращения ω0 звена приведения в начале цикла, то можно определить начальную кинетическую энергию:Т0пр=1/2·J0пр·ω02.
Тогда диаграмму энергомасс можно рассматривать в координатах Тпр(J1пр), где ось J1пр отстоит от первоначальной оси Jпр на величину Т0пр (рис.27).
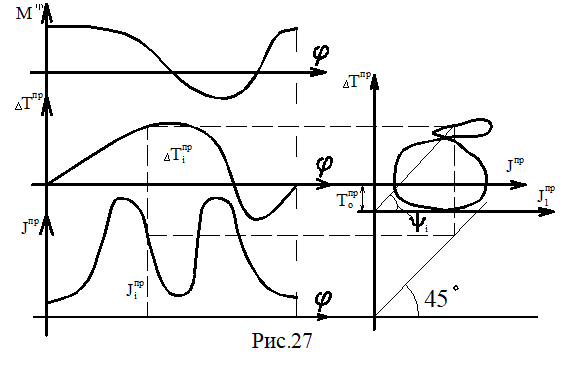 |
Так как Тпр=1/2·Jпр·ω2, то ω2=2·Тпр/Jпр=2·μТ/μJ·tgΨ,
где μТ и μJ – масштабные коэффициенты, используемые для построения диаграмм. Таким образом, диаграмма энергомасс позволяет при установившемся движении определить угловую скорость ω звена приведения в любой момент времени, т.е.
ω= ; а tgΨ= μJ/μT·ω2/2.
; а tgΨ= μJ/μT·ω2/2.
5.6. Неравномерное движение машин. Маховики
 Одним из режимов движения машины при совершении полезной работы является режим равномерного или установившегося движения.
Одним из режимов движения машины при совершении полезной работы является режим равномерного или установившегося движения.
При равномерном движе-нии угловая скорость ω вала двигателя постоянна, а при установившемся движении она
Рис. 28 периодически изменяется (рис.28),
причём степень неравномерности можно оценить коэффициентом неравномерности:
δ=(ωmax- ωmin)/ωc,
где ωс – средняя угловая скорость за цикл ωс=(ωmax+ ωmin)/2.
Неравномерность вредно сказывается на работе машин, т.к. вызывает дополнительные инерционные нагрузки, которые могут привести к поломке.
Практикой установлены значения δ, которые допустимы в различных условиях эксплуатации. Регулировать величину δ можно путем изменения величины момента инерции звена приведения, т.е. на быстро вращающийся вал закрепляется дополнительная масса, называемая маховиком.
 При конструировании маховика стремятся к получению необходимого момента инерции маховика Jм с наименьшим весом G и заданным диаметром D. Для этой цели маховик изготавливается в виде тяжелого обода, соединенного со втулкой тонким диском с отверстием или спицами (рис.29). Приближенно Jм можно определить по формуле:
При конструировании маховика стремятся к получению необходимого момента инерции маховика Jм с наименьшим весом G и заданным диаметром D. Для этой цели маховик изготавливается в виде тяжелого обода, соединенного со втулкой тонким диском с отверстием или спицами (рис.29). Приближенно Jм можно определить по формуле:
Jм≈G·D2/40, кг·м·с2.
5.7. Подбор момента инерции Jм маховика по заданному
коэффициенту неравномерности δ
Обычно требуется определить параметры маховика при заданных значениях ωср и δ. Существует два наиболее распространенных метода определения Jм – Н.И. Мерцалова и метод Ф. Виттенбауэра. Рассмотрим более точный метод Ф. Виттенбауэра, при котором предварительно строится диаграмма энергомасс ∆Тпр(Jпр).
Согласно этой диаграмме (рис.30): ω2max,min=2·μТ/μJ·tgΨmax,min,
 tgΨmax,min= μJ/μT·ω2max,min/2.
tgΨmax,min= μJ/μT·ω2max,min/2.
С другой стороны из урав-нений п.5.6.:
ωmax,min=ωс·(1+(-)δ/2).
Таким образом, найдя Ψmax и Ψmin и проведя касательные к диаграмме энергомасс под этими углами к горизонтали (рис.30), получим в точке их пересечения начало новой системы координат
Рис. 30 с осями Т и J1пр, отстоящими от
старых осей на искомую величину Jм и Т0пр.
В целом последовательность определения Jм включает следующие операции:
1. Строится диаграмма Мпр(φ) для установившегося движения.
2. Строится диаграмма ∆Тпр(φ) путем графического интегрирования диаграммы Мпр(φ).
3. Строится график Jпр(φ) и диаграмма энергомасс путем исключения параметра φ из графиков ∆Тпр(φ) и Jпр(φ).
4. Определяются углы Ψmax и Ψmin, после чего находится Jм в новых координатах Тпр и J1пр диаграммы Тпр(J1пр).
5.8. Регулирование непериодических колебаний скорости движения машин
В процессе выполнения работы приходится регулировать скорость рабочего органа машины. Например, в стационарных двигателях необходимо поддерживать скорость рабочего органа постоянной, а в двигателях транспортных машин эта скорость должна изменяться в широких пределах.
Из уравнения движения машины следует, что изменения скорости рабочего органа можно достигнуть за счет изменения разности работ движущих сил и сил сопротивления (Ад-Ас). Устройства, обеспечивающие изменения работы сил сопротивления применяются в виде тормозов, например, в транспортных машинах, которые снабжаются также и приспособлениями для одновременного разобщения двигателя с машиной – орудием.
Другим способом регулирования является изменение работы движущих сил путем воздействия на орган, подающий энергию к входному звену (поршню у двигателя внутреннего сгорания, лопаткам турбины и т.д.).
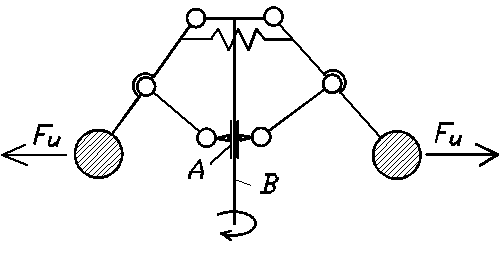
Рис. 31
Регулирование может осуществляться либо человеком-оператором, либо автоматически – с помощью устройств, называемых регуляторами.
Одним из них является центробежный регулятор (рис.31), приводимый во вращение валом двигателя В. Ползун А соединяется с органом, подводящим рабочее тело (пар, горючая смесь и т.д.). Регулятор автоматически поддерживает скорость вала двигателя постоянной, т.к. ее увеличение приводит к уменьшению подачи рабочего тела и наоборот.
5.9. Силовой расчет рычажных механизмов
Зная активные силы, действующие на звенья механизма и силы инерции этих звеньев, можно произвести его кинетостатический расчет, т.е. определить реакции в кинематических парах и уравновешивающую силу (момент) на входном звене, причем эта сила (момент) является движущей при совпадении ее направления с направлением движения входного звена или силой (моментом) сопротивления, если ее направление противоположно этому движению.
При кинетостатическом расчете реакции в кинематических парах определяются путем статического расчета, который базируется на результатах кинематического анализа, включая ускорения, необходимые для определения сил (моментов) инерции.
При силовом расчете используется принцип Даламбера, позволяющий решение задачи динамики свести к статическому расчету. Согласно этому принципу приведение ускоренно движущейся системы в равновесие обеспечивается условным приложением к этой системе сил инерции. При этом неизвестные силы определяются из уравнений статики.
 Силы взаимодействия между звеньями (реакции) можно считать направлеными по нор-
Силы взаимодействия между звеньями (реакции) можно считать направлеными по нор-
мали к контактирующим
поверхностям, если расчет ведется без учета сил трения (рис.32, а, б).
рис. 32
При графоаналитическом решении используется метод плана сил. Механизм расчленяется на структурные группы Ассура и начальные звенья. Расчет ведется, начиная с последней структурной группы и заканчивается расчетом входного звена.
При расчете структурных групп к ним прикладываются все действующие силы, включая силы инерции и реакции отброшенных связей. Каждая из неиз-
вестных реакций, при необходимости, может быть разложена на две составляющие по выбранным направлениям, например, вдоль оси звена (нормальная Fn) и перпендикулярно оси (тангенциальная Ft). При равенстве числа уравнений статики числу неизвестных реакций их можно определить аналитически и графически, построив многоугольник (план) сил. Неизвестные определятся из условия замкнутости векторной суммы сил. Рассмотрим примеры:
1)
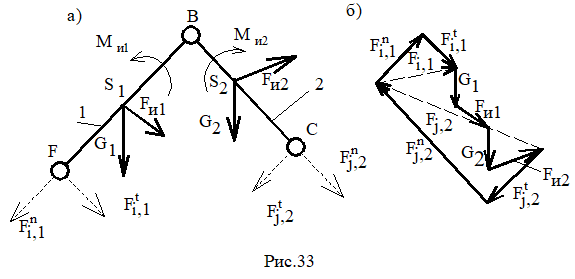 |
Двухповодковая группа с вращательными парами:
Fi,1t определяется из уравнения моментов для звена 1 - ∑МB=0 относительно т. В. (рис.33, а);
Fj,2t определяется из уравнения моментов для звена 2 - ∑МВ=0 относительно т. В (рис.33,а).
При отрицательных значениях реакций необходимо изменить их направления на противоположные.
Fi,1n и Fj,2n определяются из плана сил (рис.33,б), полученного на основе векторного уравнения;
∑Fk=0, где Fk – силы, действующие на структурную группу.
2)
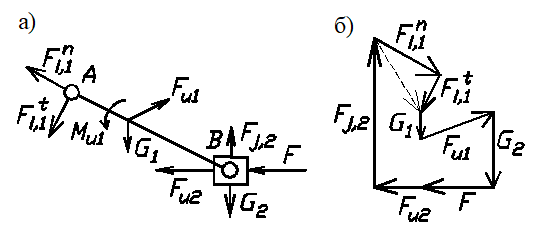 |
Двухповодковая группа шатун-ползун (рис.34, а, б)
Рис. 34
Fj,2 определяется из уравнения моментов - ∑МА=0 относительно т. А. Fi,1=Fi,1n+Fi,1t определяется из плана сил (рис.34,б) на основе векторного уравнения ∑Fk=0.
"6.1. Физическая организация жесткого диска" - тут тоже много полезного для Вас.
3) Двухповодковая группа кулиса-камень (рис.35, а)
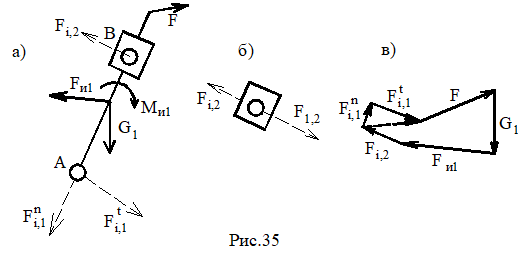 |
Fj,2 определяется из уравнения моментов - ∑МА=0.
Fi,1=Fi,1n+Fi,1t определяется из плана сил (рис.35, в), на основе векторного уравнения ∑Fk=0. При этом особенность расчета данной группы Ассура состоит в возможности некоторого упрощения вычислений в случае, когда весом камня 2 можно пренебречь. Тогда реакция Fj,2 противоположна реакции F1,2 и перпендикулярна АВ, т.е. линия ее действия известна (рис.35, б).
4) Входное (начальное) звено (рис.36, а).
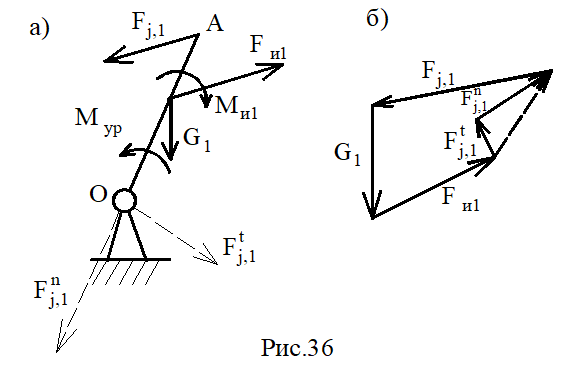 |
Мур определяется из уравнения моментов - ∑Мо=0.
Fj,1=Fj,1n+Fj,1t определяется из плана сил (рис.36,б) согласно векторному уравнению ∑Fk=0.



















