
Модуляция и детектирование измерительных сигналов
6. Модуляция и детектирование измерительных сигналов
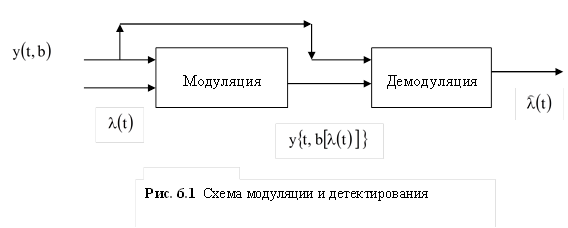 |
Под модуляцией понимается процесс внесения измерительной информации, содержащейся в первичном сообщении
 , в невозмущенный сигнал-носитель
, в невозмущенный сигнал-носитель  посредством пропорционального изменения его информативного параметра b. В результате получается модулированный сигнал
посредством пропорционального изменения его информативного параметра b. В результате получается модулированный сигнал  . Первичное сообщение часто называют модулирующим сигналом. Обратный процесс, при реализации которого из измерительного сигнала восстанавливается исходное сообщение , называется демодуляцией или детектированием.
. Первичное сообщение часто называют модулирующим сигналом. Обратный процесс, при реализации которого из измерительного сигнала восстанавливается исходное сообщение , называется демодуляцией или детектированием. Схема модуляции и детектирования представлена на рис. 6.1. В результате демодуляции мы можем получить только оценку  первичного сообщения , поскольку:
первичного сообщения , поскольку:
- с некоторыми погрешностями работают и модулятор и демодулятор,
- в процессе передачи и преобразований модулированный сигнал подвергается воздействию помех.
Разность  называется погрешностью модуляции – детектирования.
называется погрешностью модуляции – детектирования.
6.1 Виды модуляции
В качестве сигналов – носителей чаще всего используются:
- сигналы постоянного уровня (сигналы постоянного тока),
Рекомендуемые материалы
- синусоидальные сигналы (сигналы переменного тока),
- импульсные сигналы (последовательности прямоугольных импульсов).
Тип сигнала – носителя определяет вид модуляции.
1. Носитель – сигнал постоянного уровня  (рис. 6.2). Единственным параметром сигнала является его уровень
(рис. 6.2). Единственным параметром сигнала является его уровень  , поэтому возможен единственный вид модуляции – модуляция уровня сигнала или прямая модуляция. Модулированный сигнал в линейном приближении описывается выражением
, поэтому возможен единственный вид модуляции – модуляция уровня сигнала или прямая модуляция. Модулированный сигнал в линейном приближении описывается выражением
 ,
,
 где
где  - чувствительность устройства, реализующего процесс модуляции.
- чувствительность устройства, реализующего процесс модуляции.
Взаимосвязь между сигналом – носителем, модулирующим сигналом и модулированным сигналом при прямой модуляции иллюстрируются на рис. 6.2 Уровень модулированного сигнала (ПМ – сигнала) в каждый момент времени пропорционален текущему значению модулирующего сигнала, то есть первичного сообщения.
2. Носитель – синусоидальное колебание
где  - амплитуда,
- амплитуда,  - начальная фаза,
- начальная фаза,  - частота (несущая частота) невозмущенного носителя.
- частота (несущая частота) невозмущенного носителя.
Таким образом, имеется три независимых параметра, каждый из которых может быть связан с первичным сообщением. Здесь возможны три вида модуляции:
- АМ – модуляция. В зависимости от первичного сообщения изменяется амплитуда  синусоидального колебания.
синусоидального колебания.
- ФМ – модуляция. В зависимости от первичного сообщения изменяется фаза  синусоидального колебания.
синусоидального колебания.
- ЧМ – модуляция. В зависимости от первичного сообщения здесь изменяется частота ω синусоидального колебания.
На рис. 6.3 представлены графики первичного сообщения , невозмущенного сигнала – носителя  , АМ – , ФМ – и ЧМ – модулированных сигналов. На рис. 6.3 наглядно видно, что модулированные сигналы для последних двух видов модуляции очень похожи друг на друга. Поэтому их часто объединяют в один тип модуляции и называют угловой модуляцией
, АМ – , ФМ – и ЧМ – модулированных сигналов. На рис. 6.3 наглядно видно, что модулированные сигналы для последних двух видов модуляции очень похожи друг на друга. Поэтому их часто объединяют в один тип модуляции и называют угловой модуляцией
 3. Носитель – последовательность прямоугольных импульсов. Здесь имеется четыре независимых параметра – амплитуда импульсов, частота их следования, смещение по фазе (или по времени) относительно исходной (невозмущенной) последовательности и ширина отдельных импульсов. В соответствии с этим последовательность прямоугольных импульсов порождает большее число видов модуляции.
3. Носитель – последовательность прямоугольных импульсов. Здесь имеется четыре независимых параметра – амплитуда импульсов, частота их следования, смещение по фазе (или по времени) относительно исходной (невозмущенной) последовательности и ширина отдельных импульсов. В соответствии с этим последовательность прямоугольных импульсов порождает большее число видов модуляции.
- АИМ – амплитудно-импульсная модуляция, при которой амплитуда импульсов изменяется пропорционально первичному сообщению, причем вершины импульсов повторяют форму сообщения λ(t).
- ФИМ – фазоимпульсная модуляция. Первые короткие импульсы каждого периода Т являются опорными, а временной (или фазовый) сдвиг вторых импульсов относительно опорных зависит от первичного сообщения .
- ЧИМ – частотно-импульсная модуляция, при которой частота следования импульсов зависит от первичного сообщения.
- ШИМ – широтно-импульсная модуляция, при которой моменты появления импульсов по прежнему образуют периодическую последовательность (с периодом Т), а ширина импульсов пропорциональна значению сообщения  .
.
Кроме того, существует еще целый ряд вариантов этих четырех видов импульсной модуляции, отличающихся некоторыми особенностями. На рис. 6.4 представлены последовательно следующие графики:
- исходная последовательность прямоугольных импульсов,
- первичное сообщение,
- АИМ – сигнал,
- ЧИМ – сигнал вместе с исходной последовательностью импульсов,
- ФИМ – сигнал вместе с исходной последовательностью импульсов,
- ШИМ – сигнал вместе с исходной последовательностью импульсов.
6.2 Амплитудная модуляция
6.2.1 АМ – сигнал
При амплитудной модуляции невозмущенный носитель

преобразуется в АМ – сигнал
 ,
,
где - несущая частота,
- начальная фаза,
- амплитуда невозмущенного носителя,
 - часть амплитуды АМ – сигнала, зависящая от первичного сообщения и передающая измерительную информацию.
- часть амплитуды АМ – сигнала, зависящая от первичного сообщения и передающая измерительную информацию.
В линейном приближении
 ,
,
где  - коэффициент, определяемый параметрами амплитудного модулятора, то есть устройства, реализующего процедуру амплитудной модуляции, и поэтому в общем случае
- коэффициент, определяемый параметрами амплитудного модулятора, то есть устройства, реализующего процедуру амплитудной модуляции, и поэтому в общем случае

6.2.2 Однотональная модуляция
Рассмотрим в начале простейший случай однотональной модуляции, когда  - низкочастотное (по отношению к несущей частоте ) синусоидальное колебание. АМ - сигнал принимает вид:
- низкочастотное (по отношению к несущей частоте ) синусоидальное колебание. АМ - сигнал принимает вид:

В этом случае отношение

называется индексом или коэффициентом амплитудной модуляции, характеризующим глубину модуляции носителя. На рис. 6.5 представлены графики следующих сигналов:
- первичное сообщение ,
- несущее колебание E(t),
- АМ – сигнал с индексом модуляции  ,
,
- АМ – сигнал с перемодуляцией  .
.
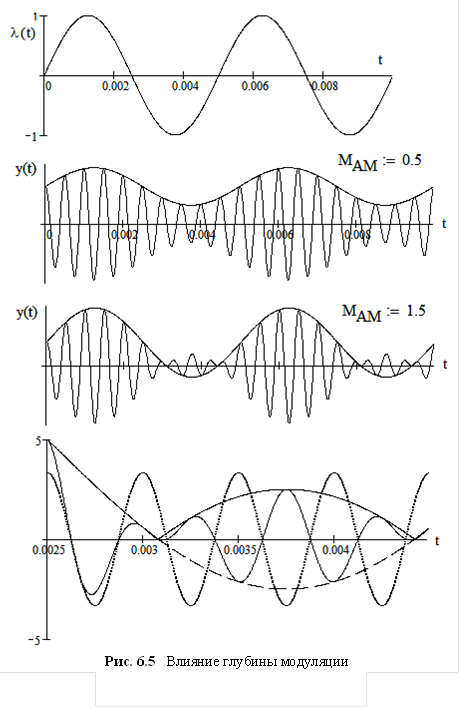 |
Графики на рисунках ясно показывают, что первичное сообщение преобразуется в узкополосный сигнал со средней частотой, равной частоте сигнала – носителя. Огибающая этого сигнала повторяет по форме первичное сообщение, поэтому детектирование сигнала сводится к выделению огибающей с помощью преобразования Гильберта.
Сложности возникают при перемодуляции. Здесь первичное сообщение уже не совпадает с огибающей модулированного сигнала. Различие заключается только в полярности сигнала.
Чтобы уловить более тонкие особенности модулированного сигнала при наличии перемодуляции, на рис. 6.5 внизу в увеличенном виде изображены графики:
- сигнала – носителя (точечный график),
- модулированного сигнала (сплошная линия),
- огибающей сигнала (сплошная линия).
После достижения нуля огибающая начинает вновь возрастать, между тем как первичное сообщение все еще убывает (штриховая линия на последнем графике рис. 6.5). Одновременно с этим в данной точке происходит изменение на π фазы модулированного сигнала по отношению к сигналу - носителю. Если раньше модулированный сигнал и сигнал – носитель колебались синхронно, то в дальнейшем они изменяются в противофазе. Это изменение фазы может быть использовано для изменения полярности огибающей на обратную в момент, когда она достигает нулевого значения.
Для получения спектра однотонального АМ – сигнала раскроем скобки в его представлении и выполним некоторые тригонометрические операции, предварительно приравняв нулю начальные фазы:
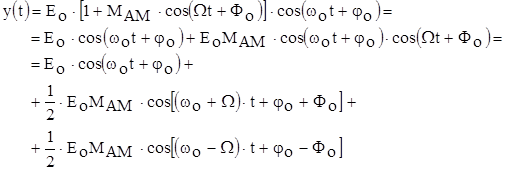
Сигнал состоит, таким образом, из трех гармонических колебаний:
- несущее колебание с частотой ,
-
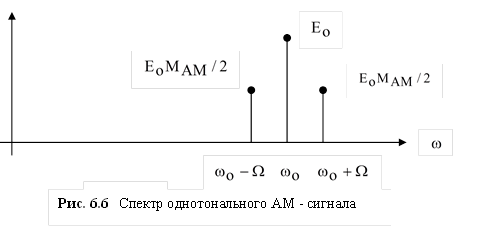 |
два колебания с частотами
 соответственно.
соответственно. Эти две частоты называются боковыми частотами или частотами – спутниками. Спектр однотонального АМ – сигнала представлен на рис.6.6. Спектр состоит из трех линий: на несущей частоте и на двух боковых частотах. Для верхней боковой частоты фаза первичного сообщения складывается с фазой несущего колебания, а для нижней боковой частоты – вычитается.
6.2.3 Спектральное представление АМ – сигналов
Пусть теперь - реализация случайного стационарного сигнала  с нулевым средним значением и корреляционной функцией
с нулевым средним значением и корреляционной функцией  . Модуляция осуществляется синусоидальным колебанием, в общем случае, со случайной начальной фазой . Тогда модулированный сигнал имеет вид:
. Модуляция осуществляется синусоидальным колебанием, в общем случае, со случайной начальной фазой . Тогда модулированный сигнал имеет вид:
 .
.
Будем считать, что начальная фаза не зависит от сообщения и распределена равномерно в интервале  .
.
Корреляционная функция модулированного сигнала по определению составляет:
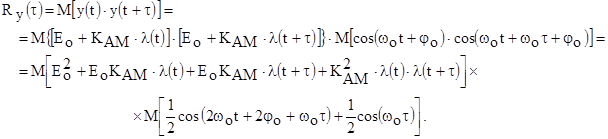
Учитывая, что - центрированный сигнал и поэтому  и что начальная фаза распределена равномерно в интервале от –π до +π, полученное выражение упрощается:
и что начальная фаза распределена равномерно в интервале от –π до +π, полученное выражение упрощается:

Полученное соотношение устанавливает взаимосвязь между корреляционной функцией исходного сигнала – первичного сообщения и корреляционной функцией модулированного сигнала  . Корреляционная функция, как и сам сигнал, подвергается модуляции на той же частоте . Кроме того, корреляционная функция модулированного сигнала не затухает до нуля, но колеблется с частотой несущего колебания, как это и должно быть для узкополосного сигнала. Это говорит о том, что в спектре модулированного сигнала должен присутствовать
. Корреляционная функция, как и сам сигнал, подвергается модуляции на той же частоте . Кроме того, корреляционная функция модулированного сигнала не затухает до нуля, но колеблется с частотой несущего колебания, как это и должно быть для узкополосного сигнала. Это говорит о том, что в спектре модулированного сигнала должен присутствовать  - импульс Дирака.
- импульс Дирака.
Вычислим теперь спектральную плотность мощности АМ – сигнала, считая заранее известной спектральную плотность мощности  первичного сообщения:
первичного сообщения:

Заменив произведений косинусов, стоящих под знаками интегралов, на полусуммы косинусов сумм и разностей соответствующих аргументов, можно получить развернутое выражение для спектральной плотности АМ – сигнала:
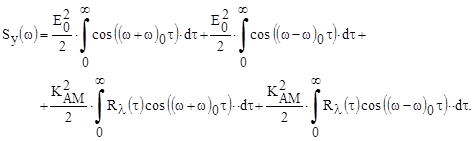
Используя свойства преобразования Фурье и интегральные выражения для δ – функций, получим окончательно:

 Спектральная плотность мощности АМ – сигнала состоит, таким образом, из двух δ – импульсов на частотах
Спектральная плотность мощности АМ – сигнала состоит, таким образом, из двух δ – импульсов на частотах  и двух копий спектральной плотности мощности первичного сообщения, перенесенных на те же два значения несущей частоты. На рис. 6.7 представлены графики спектральных плотностей мощности:
и двух копий спектральной плотности мощности первичного сообщения, перенесенных на те же два значения несущей частоты. На рис. 6.7 представлены графики спектральных плотностей мощности:
- для первичного сообщения ,
-  для АМ – сигнала при несущей частоте 400 рад/с,
для АМ – сигнала при несущей частоте 400 рад/с,
-  для АМ – сигнала при несущей частоте 100 рад/с.
для АМ – сигнала при несущей частоте 100 рад/с.
Видно. что при модуляции спектр первичного сообщения раздваивается и переносится на несущую частоту. На спектрах модулированных сигналов видны δ – всплески на несущей частоте. При малой несущей частоте полного раздвоения спектра не происходит. Хвосты смещенных спектров перекрываются, и результирующий спектр уже меньше походит на спектр первичного сообщения.
Теперь вычислим мощность, то есть дисперсию модулированного АМ – сигнала. Для этого воспользуемся равенством Парсеваля:
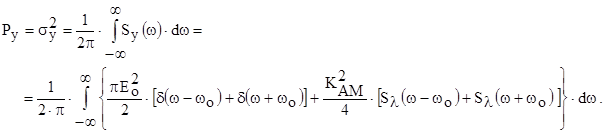
Учитывая свойства δ – функций и то обстоятельство, что
 ,
,
окончательно получим для мощности АМ – сигнала следующее выражение:

Отсюда наглядно видно, что основная доля мощности передаваемого АМ - сигнала приходится на мощность несущего колебания, бесполезного в информационном отношении. Мощность первичного сообщения занимает в общей мощности только очень малую долю. Поэтому иногда используется амплитудная модуляция с подавленной несущей, когда АМ – сигнал принимает вид
 .
.
Ясно, что при этом возникает явление перемодуляции, но это может быть учтено при детектировании сигнала.
6.2.4 Схемы включения параметрических преобразователей как схемы АМ - модуляции
 Практически АМ – модуляция всегда реализуется при построении потенциометрических и мостовых схем включения параметрических преобразователей при их питании переменным током.
Практически АМ – модуляция всегда реализуется при построении потенциометрических и мостовых схем включения параметрических преобразователей при их питании переменным током.
Рассмотрим простой пример. Имеется ёмкостный преобразователь малых перемещений (рис. 6.8). Преобразователь состоит из двух пластин, одна из которых (1) неподвижна, а вторая пластина (2) жестко связана со штоком преобразователя и перемещается вместе с ним. Эти две пластины образуют конденсатор, емкость которого зависит от площади пластин и расстояния между ними:
 ,
,
где S – площадь пластин,
d – расстояние между пластинами,
 - диэлектрическая постоянная.
- диэлектрическая постоянная.
Расстояние между пластинами d равно сумме некоторого начального значения  и измеряемого перемещения штока преобразователя. Это перемещение и является в данном случае первичным сообщением . Таким образом,
и измеряемого перемещения штока преобразователя. Это перемещение и является в данном случае первичным сообщением . Таким образом,  и поэтому
и поэтому
 .
.
Этот конденсатор включается последовательно с резистором, имеющим сопротивление R, и схема, состоящая из сопротивления R и емкости  , питается переменным напряжением
, питается переменным напряжением  . Ток, протекающий в цепи, составляет:
. Ток, протекающий в цепи, составляет:
 .
.
Напряжение, снимаемое с сопротивления R, является выходным сигналом и, без учета фазовых искажений, может быть записано в виде:
 .
.
Подставляя сюда выражение для емкости конденсатора через первичное сообщение и параметры преобразователя, получим окончательно:
 .
.
Раскладывая полученное выражение в степенной ряд относительно получаем в линейном приближении:
 .
.
Если теперь ввести обозначения:
 ,
,
то выходной сигнал примет вид, характерный для АМ – сигнала:

Таким образом, потенциометрическая схема включения емкостного преобразователя обеспечивает амплитудную модуляцию измеряемого, переменного во времени перемещения , на несущей частоте, равной частоте напряжения питания потенциометрической схемы.
6.2.5 Демодуляция АМ - сигналов
Теперь посмотрим, как из АМ – сигнала можно восстановить первичное сообщение, то есть получить сигнал постоянного тока, пропорциональный первичному сообщению.
Простейший способ демодуляции основан на использовании двухполупериодной схемы выпрямления сигнала. В результате такого выпрямления появляется сигнал, пропорциональный модулю исходного АМ – сигнала. Он состоит из косинусоидальных импульсов, которые теперь нужно пропустить через фильтр нижних частот, который сгладит эти импульсы.
После сглаживания в составе сигнала останется низкочастотная составляющая, пропорциональная первичному сообщению, и шум демодуляции, представляющий собой колебания с основной частотой, равной удвоенной частоте носителя, не до конца подавленные фильтром низких частот. Кроме того, имеют место и искажения сигнала, связанные с особенностями частотных характеристик фильтра.
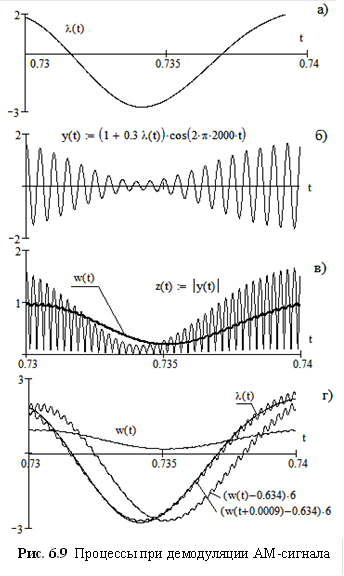
На рис. 6.9 представлены графики, иллюстрирующие работу такого демодулятора. На рисунке последовательно представлены графики коротких фрагментов:
а) первичного сообщения ,
б) АМ сигнала на несущей частоте 2000 Гц,
в) сигнала w(t), получаемого в результате двухполупериодного выпрямления АМ – сигнала, и результата w(t) сглаживания предыдущего сигнала RC - фильтром нижних частот 1-го порядка с постоянной времени T=RC=0.001 c. После смещения нуля на 0,643В и усиления в 6 раз получается сигнал
После смещения нуля на 0,643В и усиления в 6 раз получается сигнал  (см. рис. 6.9), который уже очень близок к первичному сообщению, но отстает от него примерно на 0,0009 с. На рис. 6.10 представлен фрагмент графика изменения погрешности детектирования на том же интервале времени (0,73 – 0,74 с), построенный с учетом этого временного запаздывания.
(см. рис. 6.9), который уже очень близок к первичному сообщению, но отстает от него примерно на 0,0009 с. На рис. 6.10 представлен фрагмент графика изменения погрешности детектирования на том же интервале времени (0,73 – 0,74 с), построенный с учетом этого временного запаздывания.
 Для устранения шума можно использовать более изощренные фильтры, нежели примененный в данном примере фильтр 1-го порядка.
Для устранения шума можно использовать более изощренные фильтры, нежели примененный в данном примере фильтр 1-го порядка.
При наличии перемодуляции или при использовании амплитудной модуляции с подавленной несущей описанный алгоритм демодуляции неприемлем, поскольку огибающая АМ – сигнала (рис. 6.11-В) после выпрямления (рис. 6.11-С) уже не будет повторять форму первичного сообщения (рис. 10А)
В этих случаях используется другой алгоритм – алгоритм синхронного детектирования. Реализующие его электронные схемы также называются синхронными детекторами.
Сущность синхронного детектирования заключается в следующем.
1. АМ – сигнал, например, сигнал с подавленной несущей
умножается на опорное колебание
 .
.
В результате перемножения получается сигнал

который содержит в себе:
- первичное сообщение, увеличенное в  раз,
раз,
- быстро изменяющееся колебание с частотой, в два раза превышающей частоту несущего сигнала (кривая на рис. 6.11-D).
2. Далее полученный сигнал подвергается низкочастотной фильтрации. В результате получается нечто, похожее на первичное сообщение (кривая, примерно вдвое меньшего размаха на рис. 6.11-D). После усиления сигнала в раз получается первичное сообщение, но содержащее в себе останки несущего колебания, которые образуют шум демодуляции.
Следует также помнить, что фазовые искажения, сопутствующие низкочастотной фильтрации, приводят к запаздыванию выходного сигнала синхронного детектора относительно первичного сообщения. Если используется простейший RC- фильтр первого порядка (апериодическое звено первого порядка), выходной сигнал будет запаздывать на время, примерно равное постоянной времени фильтра  .
.
При синхронном детектировании возможно возникновение еще двух погрешностей:
- при несовпадении фаз несущего колебания и опорного колебания, используемого для детектирования, уровень демодулированного сигнала уменьшается пропорционально косинусу разности фаз,
- при несовпадении частот несущего колебания и опорного колебания, используемого для детектирования, на демодулированный сигнал накладываются биения с частотой, равной разности частот этих колебаний.
Для обеспечения синхронности и синфазности несущего и опорного сигналов используются специальные схемы фазовой автоподстройки частоты (ФАПЧ), которые изучаются в курсе электроники.
6.3 Угловая модуляция
Как уже было показано ранее, частотная и фазовая модуляции очень похожи друг на друга, поэтому их и объединяют под общим термином «угловая модуляция». Но все-таки каждый вид модуляции имеет свои особенности, которые следует рассмотреть более подробно.
6.3.1 Частотная модуляция
При частотной модуляции пропорционально первичному сообщению изменяется мгновенная частота невозмущенного носителя:
 ,
,
где - несущая частота,
 - коэффициент частотной модуляции, определяемый параметрами частотного модулятора,
- коэффициент частотной модуляции, определяемый параметрами частотного модулятора,
 изменение частоты под действием первичного сообщения .
изменение частоты под действием первичного сообщения .
Наибольшее изменение частоты  называется девиацией частоты, а отношение
называется девиацией частоты, а отношение  - глубиной частотной модуляции. Поскольку полная фаза колебания определяется как интеграл от мгновенной частоты, то ЧМ – сигнал должен иметь вид:
- глубиной частотной модуляции. Поскольку полная фаза колебания определяется как интеграл от мгновенной частоты, то ЧМ – сигнал должен иметь вид:
 .
.
Если первичное сообщение является реализацией случайного стационарного гауссова сигнала с корреляционной функцией  , то можно показать, хотя это и довольно сложно, что ЧМ – сигнал будет также стационарным с корреляционной функцией:
, то можно показать, хотя это и довольно сложно, что ЧМ – сигнал будет также стационарным с корреляционной функцией:
 .
.
Отсюда следует, что показатель экспоненты при  стремится к
стремится к  . Это означает, что корреляционная функция ЧМ – сигнала затухает до нуля, поэтому спектр ЧМ – сигнала не содержит особенностей в виде δ – импульсов. Этим частотная модуляция существенно отличается от амплитудной модуляции.
. Это означает, что корреляционная функция ЧМ – сигнала затухает до нуля, поэтому спектр ЧМ – сигнала не содержит особенностей в виде δ – импульсов. Этим частотная модуляция существенно отличается от амплитудной модуляции.
Пример
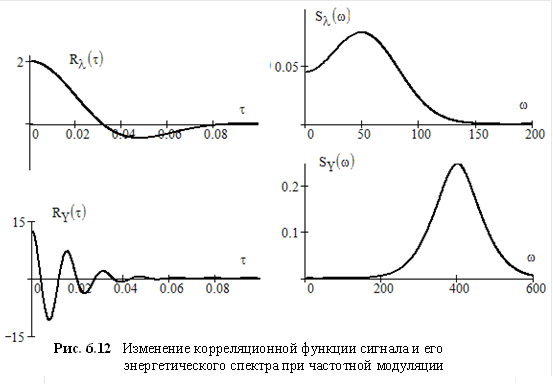
Первичное сообщение имеет корреляционную функцию  . График корреляционной функции представлен в верхней части рис.6.12, а рядом с ним, справа, изображен график спектральной плотности мощности для этого первичного сообщения. Как видно из графика, протяженность спектра первичного сообщения лишь ненамного превышает значение, равное 150 рад / сек.
. График корреляционной функции представлен в верхней части рис.6.12, а рядом с ним, справа, изображен график спектральной плотности мощности для этого первичного сообщения. Как видно из графика, протяженность спектра первичного сообщения лишь ненамного превышает значение, равное 150 рад / сек.
Это первичное сообщение подвергает частотной модуляции сигнал – носитель с амплитудой 10 В на несущей частоте 400 рад / сек. Коэффициент частотной модуляции  .
.
В результате частотной модуляции получается сигнал, корреляционная функция которого представлена в нижнем левом углу рис. 6.12. Справа изображен график спектральной плотности мощности этого сигнала.
Корреляционная функция затухает, как ей это и положено, колеблясь вокруг нуля с частотой, равной частот несущего колебания. Спектр сигнала после модуляции сместился в область несущей частоты, ширина спектра составляет, приблизительно, 400 рад / сек.
Таким образом, в отличие от амплитудной модуляции, ЧМ – сигнал имеет следующие особенности:
- мощность, то есть дисперсия ЧМ – сигнала не зависит от первичного сообщения и равна половине квадрата амплитуды несущего колебания,
- корреляционная функция ЧМ – сигнала затухает до нуля и имеет колебательный характер с частотой, равной частоте несущего колебания,
- спектр ЧМ – сигнала располагается вокруг частоты несущего колебания,
- спектр ЧМ – сигнала не содержит δ – всплесков,
- 
протяженность спектра ЧМ – сигнала превышает протяженность спектра АМ – сигнала при той же спектральной плотности первичного сообщения.
6.3.2 Фазовая модуляция
При фазовой модуляции первичное сообщение с коэффициентом фазовой модуляции  непосредственно изменяет полную фазу носителя:
непосредственно изменяет полную фазу носителя:
 .
.
В результате оказывается, что ФМ – сигнал имеет структуру, более простую, чем структура ЧМ – сигнала:

Наибольшее изменение фазы под воздействием первичного сообщения  называется девиацией фазы.
называется девиацией фазы.
Если первичное сообщение является реализацией случайного нормального стационарного сигнала с корреляционной функцией , то стационарным будет и ФМ – сигнал, причем его корреляционная функция имеет вид:

При больших τ, когда , корреляционная функция ФМ – сигнала, в противоположность ЧМ – сигналу, не затухает до нуля, но продолжает колебаться с частотой, равной частоте сигнала – носителя:
 .
.
Это говорит о том, что спектр ФМ – сигнала с необходимостью содержит δ – импульс на несущей частоте.
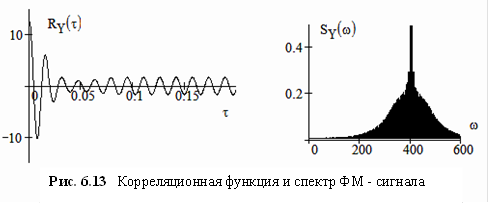
В качестве примера на рис. 6.13 представлен пример корреляционной функции (слева) и спектральной плотности мощности (справа) для сигнала, полученного в результате фазовой модуляции того же самого первичного сообщения, что и на рис. 6.12 при том же самом сигнале – носителе. Коэффициент фазовой модуляции был при этом принят равным 1.0. Из рис. 6.13 ясно видно, что
- корреляционная функция ФМ – сигнала до нуля не затухает,
- что она колеблется вокруг нуля с частотой, равной несущей частоте,
- что спектр сигнала переносится на несущую частоту,
- что спектр сигнала стал более протяженным, чем при частотной модуляции,
- что спектр содержит в себе δ – импульс на несущей частоте.
6.3.3 Демодуляция ЧМ – и ФМ – сигналов
Самый прямой способ демодуляции сигналов, полученных в результате угловой модуляции, заключается в следующем:
- для модулированного сигнала  с помощью преобразования Гильберта вычисляется его квадратурное дополнение
с помощью преобразования Гильберта вычисляется его квадратурное дополнение  ,
,
- строится аналитический сигнал  , где i – мнимая единица,
, где i – мнимая единица,
- определяется фазовая функция  как аргумент комплексного аналитического сигнала.
как аргумент комплексного аналитического сигнала.
Характер дальнейших действий зависит от конкретного вида модуляции. При фазовой модуляции фазовая функция равна
 ,
,
поэтому для демодуляции сигнала достаточно из фазовой функции вычесть слагаемое  :
:
 .
.
При частотной модуляции фазовая функция имеет вид:
 ,
,
поэтому для получения демодулированного сигнала требуется продифференцировать фазовую функцию и из результата вычесть несущую частоту:
Недостатком такого метода демодуляции является то, что для его осуществления требуется иметь весь сигнал полностью. Только после получения всего сигнала его можно подвергнуть преобразованию Гильберта и затем вычислить фазовую функцию. Таким образом, демодуляция сигнала возможна только в режиме off line.
Наиболее удобной альтернативой для демодуляции ЧМ – и ФМ – сигналов в режиме реального времени является квадратурная обработка сигнала.
Обозначим сигнал, получаемый в результате угловой модуляции, как:
 ,
,
где  - при фазовой модуляции,
- при фазовой модуляции,
 - при частотной модуляции.
- при частотной модуляции.
Для получения двух сигналов, находящихся в квадратуре друг относительно друга, умножим УМ – сигнал на два опорных напряжения  и
и  , сдвинутых относительно друг друга на
, сдвинутых относительно друг друга на  , то есть на
, то есть на  . В результате перемножения получаем два сигнала:
. В результате перемножения получаем два сигнала:
 ,
,
 .
.
Каждый из этих сигналов содержит две составляющие:
- низкочастотная составляющая, определяемая синусом или косинусом начальной фазы  ,
,
- высокочастотная составляющая (УМ – сигнал на удвоенной несущей частоте).
Путем низкочастотной фильтрации этих двух сигналов можно в большой степени освободиться от высокочастотных составляющих. В результате получим два новых сигнала:
 ,
,
Лекция "107 Средства, понижающие проницаемость сосудистой стенки" также может быть Вам полезна.
 .
.
При фазовой модуляции демодулированный сигнал находится как аргумент аналитического сигнала, образуемого парой квадратурных составляющих:

Для демодуляции ЧМ – сигнала полученную фазовую функцию следует продифференцировать:
 .
.
Всю эту многоэтапную процедуру можно реализовать электронной схемой, построенной на соответствующих элементах.


















