
Конструкторское проектирование
ЛЕКЦИЯ 9
9.1. Конструкторское проектирование
На данном этапе проектирования принципиальная электрическая схема преобразуется в совокупность конструктивных узлов, которые обеспечивают ее физическую реализацию. Основным принципом конструирования является модульность. Модули, по возможности, унифицированные объединяются в иерархическую структуру.
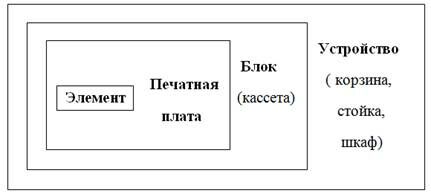
Рис. 9.1. Иерархия модулей
Типовыми задачами конструкторского проектирования являются компоновка блоков, размещение компонентов и трассировка монтажных соединений.
Методы конструкторского проектирования можно условно разделить на итерационные и конструктивные.
Рекомендуемые материалы
Конструктивные методы, в свою очередь, делятся на последовательные и параллельные. При последовательном конструировании выбирается элемент, затем добавляется второй, затем к ним третий и т.д. При параллельном конструировании формируется несколько групп элементов в пределах одного шага алгоритма, затем группы объединяют.
Итерационные методы – предусматривают парные перестановки элементов с целью улучшения конструкторского решения на основе максимума заданного критерия качества.

Рис. 9.2. Классификация методов конструкторского проектирования
9.2. Модели конструкций и схем
Наиболее общей моделью является монтажное пространство, размеры которого соответствуют схеме данного уровня иерархии. Модель обычно является дискретной и представляет собой описание координатной сетки. Задачи проектирования всегда связаны с оценкой длины соединений.
Существуют три способа оценки длины соединений:
1) по кратчайшему расстоянию между двумя точками (для оценки соединений типа цепь, звезда) dij =  ;
;
2) оценка длины ортогональных соединений, параллельных осям координат (для оценки длин шин, магистралей, каналов): dij = | xj – xi| + | yj – yi|;
3) оценка максимальной длины проводников: dij = | xj – xi |s + | yj – yi|s, где
S = 2, 3, …



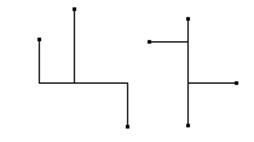
Цепь Звезда Ортогональные соединения
Рис. 9.3. Примеры соединений проводников
Для конструкторского проектирования (компоновки, размещения и трассировки) используют описание схем в виде графов, которые, в свою очередь, могут быть представлены в виде матриц или таблиц. Достоинством графа является наглядность (соответствие ветвей соединениям, возможность использования методов преобразования графов дает снижение объема описания).
В матрице обеспечивается соответствие номеров элементов и номеров его выводов, а в таблице – соответствие номера вывода и номера столбца таблицы. Таким образом, при табличном задании обеспечивается снижение объема данных и, следовательно, объема памяти.
9.3. Алгоритмы компоновки
Задача компоновки обычно ставится как задача оптимального разрезания (разбиения) устройства, для которого задана функция и (или) принципиальная схема. Существующие ограничения (надежность, технологичность, ремонтопригодность, стоимость и т.д.) могут выступать в качестве критериев качества.
Пример критериев качества в задачах компоновки.
1. Каждый блок содержит не более P элементов и Q выводов.
2. Каждый блок размещается в заданном объеме V и имеет длину внешних связей не более E.
3. Общее число соединений между блоками должно быть минимальным.
4. Число блоков N должно быть минимальным.
5. Блоки выбираются из числа стандартных (из библиотеки).
6. Число типов блоков должно быть минимальным.
7. Число выводов в блоках должно быть минимальным.
8. Задержка распространения сигнала не должна превышать заданную.
9. Стоимость производства и ремонта не должна превышать заданную.
Для решения данных задач обычно используются методы линейного и нелинейного программирования и соответствующие численные алгоритмы.
9.4. Алгоритмы размещения
В общем случае необходимо найти на множестве позиций монтажного пространства такое размещение элементов, которое обеспечит требование к заданному критерию качества.
Особенностью критериев является их эвристический характер, так как все они косвенно отражают истинную цель размещения: упрощение последующей трассировки.
Критерии качества в задачах размещения.
1. Минимальная суммарная длина проводников.
2. Минимальная длина проводников, соединенных наиболее удаленно.
3. Минимальная длина проводников, соединяющих источник сигнала с нагрузкой.
4. Минимальная суммарная площадь зон реализации всех цепей (обеспечивается минимум временных задержек между компонентами).
5. Минимальное число проводников, длина которых больше заданной.
6. Минимальная наибольшая длина соединенных проводников.
7. Максимально близкое размещение компонентов, имеющих наибольшее число общих цепей.
Конструктивные алгоритмы дают завершенное решение только по окончании работы, пока все элементы не будут установлены.
Итерационные алгоритмы дают законченный вариант на каждом этапе работы, так как каждый последующий шаг осуществляет улучшение начального размещения в соответствии с заданным критерием оптимизации.
9.5. Алгоритмы трассировки
Задача трассировки состоит в построении соединений между элементами, размещенными в заданном монтажном пространстве.
Критерии для решения задачи трассировки.
1. Минимальная длина соединения.
2. Минимальное число соединений, длина которых меньше заданной.
3. Минимальное число переходов между слоями.
4. Минимальное число слоев.
5. Минимальные «наводки».
6. Максимальная удаленность трасс соединений.
7. Число соединений к одному выводу не более заданного и др.
Задача трассировки имеет метрический и топологический аспекты.
Метрический аспект связан с учетом конструктивных размеров элементов, соединений, монтажного пространства.
Топологический аспект связан с учетом числа допустимых пересечений, числа слоев, пространственного расположения отдельных частей и соединений.
Для решения задач трассировки используются как конструктивные, так и итерационные алгоритмы. При конструктивном последовательном алгоритме трасса прокладывается одна за другой. Таким образом, осуществляется локальная оптимизация при прокладке каждой трассы. Выбор оптимального решения – эвристический.
Итерационные алгоритмы после прокладки всех трасс предполагают удаление наихудших с точки зрения критериев качества и повторение трассировки.
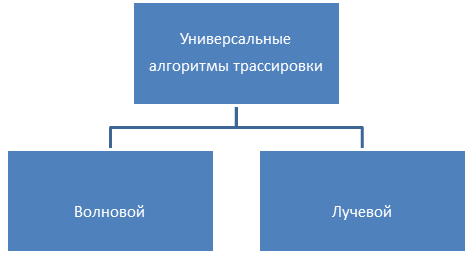
Рис. 9.4. Разновидности алгоритмов трассировки
В большинстве случаев используется так называемый волновой алгоритм определения трассы, который позволяет обходить занятые позиции. Идея волнового алгоритма заключается в выборе наименьшего пути из возможных путей обхода препятствия. При этом учитывается минимум изгибов и максимум плотности монтажа.
Существует другой эвристический алгоритм, который называется лучевым. Сущность алгоритма заключается в отыскании оптимальной трассы между двумя точками, соединенными отрезком прямой (лучом). При этом определяют минимальное отклонение от направления, заданного лучом. Трассировку осуществляют как в прямом направлении от точки А к точке В, так и в обратном – от точки В к точке А, и выбирают минимальную трассу.
В ряде случаев дополнительно используют параллельную прокладку трасс (например, для цифровых схем при наличии шинной организации). Особый тип алгоритмов – трассировка без пересечений (для однослойного монтажа). Необходимо иметь в виду, что ни один из алгоритмов не гарантирует полную трассировку. Поэтому в программах трассировки имеется возможность доработки соединений вручную в режиме диалога с ЭВМ.
9.6. Техническая оптимизация
Оптимизация – завершающий этап проектирования РЭА. Она состоит в определении такой совокупности внутренних параметров схемы, при которой заранее выбранные выходные параметры будут наилучшими.
Попутно оптимизация позволяет:
1) определить те внутренние параметры, которые оказывают наибольшее влияние на выходные;
2) оценить влияние дестабилизирующих факторов;
3) обнаружить отказы схемы.
Решение любой задачи оптимизации начинается:
1) с выбора критерия качества (оптимальности), соответствующего целевой функции;
2) с формулировки системы ограничений, в рамках которой отыскивается оптимальное решение.
9.6.1. Особенности оптимизации РЭА
В силу специфики РЭА ее оптимизация имеет следующие особенности:
1) формализация задачи оптимизации РЭА существенно сложнее формализации задач ее расчета и анализа, так как многое основано на эвристических подходах, опыте и интуиции разработчика, что усложняет использование стандартных методов описания и проектирования;
2) все процессы в схеме могут протекать лишь в определенных пределах, что определяет большое число ограничений и усложняет формализацию задачи;
3) большое число внутренних параметров схемы (так как много элементов) приводит к большим размерам систем дифференциальных уравнений и усложнению математической модели;
4) все реальные целевые функции достаточно сложны для поиска экстремумов;
5) выходные параметры, а также их большое число усложняют вычисления и, следовательно, увеличивают затраты времени.
9.6.2. Критерии оптимальности
Существует ряд критериев оптимальности, основные из которых рассмотрены ниже.
1. Частные критерии.
При использовании частных критериев выбирается один из выходных параметров схемы и подвергается оптимизации. На остальные выходные параметры накладываются ограничения. Например, максимизация по быстродействию при ограничении потребляемой мощности.
2. Детерминированные критерии.
К детерминированным относятся критерии, зависящие от номинальных внутренних параметров схемы а также критерии, учитывающие временные и частотные характеристики схемы.
3. Статистические критерии.
В отличие от детерминированных критериев, зависящих только от номиналов внутренних параметров, статистические критерии основаны на использовании статистических характеристик схемы (например, процент выхода годных схем). Статистические критерии предполагают выбор одного параметра (характеристики) и наложение ограничений на остальные.
4. Критерий последовательного принятия решений.
Применяется по ходу оптимизации по совокупности параметров как последовательно уточняемый критерий. Любое решение по нескольким выходным параметрам является всегда компромиссом. Поэтому решение не является оптимальным ни по одному параметру, но приемлемо по всей совокупности. Например: выходные параметры ранжируют по важности. Затем оптимизируют, допуская некоторое предельно возможное ухудшение первого параметра и т.д. Такой метод называется методом последовательных уступок.
5. Обобщенные критерии.
Предполагают построение единичного критерия оптимальности в виде свертки векторного критерия в скалярный.
Свертка возможна путем:
1) нормирования всех выходных параметров схем с помощью весовых коэффициентов и объединения их в обобщенный скалярный, который затем максимизируется или минимизируется. Пример: К = К1×К2×К3×…×Кn, где Кi<1;
2) определения на каждом шаге оптимизации максимального отклонения выбранного параметра от номинала и решения задачи максимизации (минимизации) этого отклонения.
6. Диалоговые критерии.
Предполагают оперативное взаимодействие разработчика схемы с ЭВМ. ЭВМ вычисляет, а человек принимает решение. Процесс заключается в поиске множества неулучшаемых решений (т.е. когда ни один из выходных параметров не может быть улучшен без ухудшения хотя бы одного из остальных). Далее разработчики на основе опыта и интуиции выбирают оптимальный вариант схемы.
7. Аддитивный, мультипликативный и минимаксный критерий
Рассмотрим формирование данных критериев на примере схемы ТТЛ.
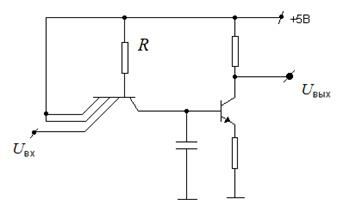
Рис. 9.5. Упрощенная схема ТТЛ
Выходные параметры схемы: Р – потребляемая мощность, t – время задержки.
Оптимизация производится по внутреннему параметру R – входное сопротивление схемы, при этом используют зависимости частных критериев, приведенные на рис. 9.6.
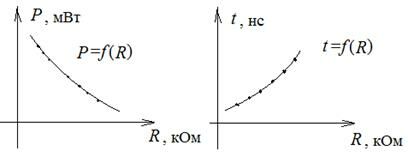
Рис. 9.6. Зависимости выходных параметров (частных критериев)
от внутреннего параметра R (входного сопротивления)
Сформируем критерии оптимальности для данной схемы.
1. Обобщенный, адаптивный критерий: F(R) =  fi(R) = a1P + a2 t. Максимум функции соответствует оптимальному решению.
fi(R) = a1P + a2 t. Максимум функции соответствует оптимальному решению.
2. Обобщенный мультипликативный критерий: F(R) = [ fi(R)] = [(a1P) (a2 t)]–1.
fi(R)] = [(a1P) (a2 t)]–1.
Максимум функции соответствует оптимальному решению.
3. Минимаксный критерий. Целевую функцию формируют как максимальную из двух частных критериев на каждом шаге оптимизации:  , где Rном – номинальное значение, а Δfi – отклонение R от номинала. Таким образом, определяется максимальное отклонение параметра от номинала на каждом шаге. Затем данный критерий минимизируется, т.е. F(R)→min.
, где Rном – номинальное значение, а Δfi – отклонение R от номинала. Таким образом, определяется максимальное отклонение параметра от номинала на каждом шаге. Затем данный критерий минимизируется, т.е. F(R)→min.
Значение Ropt , получаемое при аддитивном, мультипликативном и минимаксных критериях, может отличаться. Таким образом, выбор критерия вещь субъективная и зависит от цели, которую ставит себе разработчик.
9.6.3. Методы непрерывной параметрической оптимизации
Параметрическая оптимизация – это процесс определения внутренних параметров элементов схемы, при которых достигаются заданные (или экстремальные) значения ее выходных параметров. При этом структура схемы, типы элементов, диапазоны изменения параметров известны.
Задачи проектирования, требующие оптимизации, условно делят на
4 группы:
1) поиск оптимальных параметров схемы, обеспечивающих экстремальные значения целевой функции (например, минимальные нелинейные искажения);
2) приближение расчетных характеристик к экспериментальным (например, для уточнения параметров модели);
3) адаптация известных схем к новым условиям (например, к другому диапазону частот, температур и т.п.);
4) уточнение параметров синтезированных схем (например, уточнение параметров схем, полученных на основе приближенных инженерных расчетов).
Все перечисленные задачи решаются на основе многовариантного расчета. Каждую серию расчетов разработчик оценивает и выбирает оптимальную с его точки зрения. В самом общем случае задачи оптимизации такого рода формулируются в терминах общей задачи нелинейного программирования. Если удается линеаризовать целевую функцию, то задача оптимизации сводится к задаче линейного программирования.
Под данной общей задачей понимается поиск максимума или минимума целевой функции в условиях действующих ограничений, а именно: в областях варьируемых параметров схемы X.
Целевой функцией является какой-либо выходной параметр Y = F(X). Необходимыми и достаточными условиями существования экстремума являются:
1) дифференцируемость F(X) в точке X*;
2) стационарность точки X*;
3) H(X*) > 0 , где H(X*) – так называемая, матрица Гессе, состоящая из частных производных целевой функции F(X) , взятых в точке X*.
Методы определения экстремума направлены на последовательную проверку этих трех условий. В случае их выполнения точка X* является экстремумом.
Реально целевая функция может иметь несколько экстремумов, что усложняет оптимизацию. Выделяют глобальные и локальные экстремумы. Глобальные экстремумы отличаются наибольшим (наименьшим) значением целевой функции. Таким образом, необходимо обеспечить выделение глобальных экстремумов.
Различают также безусловный экстремум, когда диапазон параметров Х неограничен и условный, когда этот диапазон ограничивается условиями оптимизации. Задача условной оптимизации считается более сложной. В математике разработаны специальные методы, которые позволяют производить поиски данных разновидностей экстремумов.
Контрольные вопросы к лекции
1. Что является объектами конструкторского проектирования?
2. Каковы особенности моделей конструкций?
3. В чем заключается задача компоновки?
4. Каковы основные критерии качества в задачах компоновки?
5. В чем заключается задача размещения?
6. Каковы основные критерии качества в задачах размещения?
Ещё посмотрите лекцию "187 Структура культуры" по этой теме.
7. В чем заключается задача трассировки?
8. Каковы основные критерии качества в задачах трассировки?
9. Что такое техническая оптимизация?
10. В чем состоят особенности оптимизации РЭА?
11. Какие существуют критерии оптимальности?
12. Какие существуют методы оптимизации?



















