


Асинхронные двигатели
Асинхронные двигатели
Асинхронные двигатели по конструкции бывают: – с короткозамкнутым ротором и с фазным ротором.
Трехфазные асинхронные двигатели с короткозамкнутым роторам отличаются простотой и надежностью (в них отсутствуют трущиеся контактные пары). Недостатки таких двигателей: большие пусковые токи (в момент включения скачок тока больше в 5-7 раз, чем установившейся ток) и пусковые крутящие моменты; проектируются двигатели, как правило, на одну частоту вращения ротора.
Конструктивно двигатель содержит: в статоре равномерно распределенные по его окружности обмотки фаз системы трехфазного тока, обеспечивающие при работе вращающееся магнитное поле; ротор таких двигателей состоит из медных стержней, размещенных по окружности, с торцов соединенных (замкнутых друг с другом) электропроводящими кольцами. По виду такой ротор напоминает беличью клетку (см. рис.)

Бывают конструкции и с наклонным расположением стержней относительно образующей цилиндра.
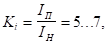
Схема асинхронной машины показана на рисунке. В схеме асинхронной машины и ее принципе действия есть сходство с трансформатором. Отличие заключается в том, что вторичная обмотка размещается на вращающемся роторе и не связана с внешней сетью. На схеме рис.12 - а) эта обмотка состоит из стержней, замкнутых накоротко, что соответствует двигателю с короткозамкнутым ротором, а в двигателях с фазным ротором она соединяется с внешними сопротивлениями — рис.12 - б).
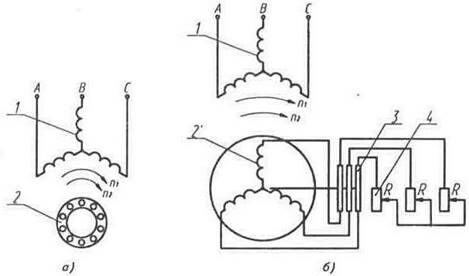
Рис. 12. Схемы асинхронной машины:
а) асинхронный двигатель с короткозамкнутым ротором; 6) асинхронный двигатель с фазным ротором; 1 — обмотки статора, 2 — ротор с короткозамкнутыми стержнями, 2 — обмотки фазного ротора, 3 — контактные кольца, 4— сопротивления в цепи фазного ротора.
Рекомендуемые материалы
Обмотка статора равномерно распределена по его окружности. Обмотки фаз статора соединяются в звезду или в треугольник.
Двигатель работает следующим образом: система трехфазного тока, подводимая к обмоткам статора, создает в нем вращающееся магнитное поле. Это магнитное поле, перемещаясь, будет индуцировать в стержнях ротора электрический ток. Этот ток будет вызывать вокруг стержней свое магнитное поле. Оно будет взаимодействовать с магнитным полем в статоре, и будет заставлять ротор следовать за ним, т. е. вращаться. Магнитное поле в стержнях будет «догонять» магнитное поле в статоре.
В таких двигателях синхронности не достигается, в нем присутствует отставание скорости вращения ротора от скорости вращения поля в статоре.
Таким образом, трехфазный ток проходя по трем обмоткам сдвинутым в пространстве на 120° образует синхронно вращающееся магнитное поле. Синхронная частота вращения поля определяется частотой тока в сети:
 [об/мин],
[об/мин],
где f - частота изменения тока, Гц;
p - число пар полюсов обмотки статора, которое определяется его конструкцией.
Учитывая, что частота тока равна 50 Гц, определим синхронные частоты вращения магнитного поля для различного числа пар полюсов р двигателя:
| р | 1 | 2 | 3 | 4 | 5 | 6 |
| n1, об/мин | 3000 | 1500 | 1000 | 750 | 600 | 500 |
Т.о. изменяя число пар полюсов р можно дискретно изменять частоту вращения магнитного поля статора. Промышленностью выпускаются многоскоростные двигатели, в которых предусмотрена возможность переключения числа пар полюсов.
Асинхронные двигатели характеризуются синхронной частотой статора – nс. Чтобы выпускать двигатели с другой синхронной частотой они должны конструироваться с большим числом пар полюсов – т.е. обмоток в статоре, кратных трем.
Отставание частоты вращения ротора (np) в асинхронном двигателе от синхронной частоты вращения магнитного поля в статоре (nс) оценивается параметром S –скольжением.
S = (nс – nр) *100%/nс; S -скольжение, составляет величину от 1,5 до 7% и зависит от нагрузки на валу двигателя .
Трехфазные асинхронные двигатели с фазным роторам. Эти двигатели характеризуются меньшими пусковыми моментами и токами, чем двигатели с короткозамкнутым ротором. У них есть возможность некоторого плавного регулирование скорости вращения. Они применяются в механизмах, в которых опасна динамика (рывки) в момент включения.
По устройству двигатель с фазным роторам и принципу действия аналогичен двигателю с коротко замкнутым. Отличие: ротор конструируется не в виде «беличьей клетки», он содержит в себе систему трех обмоток, которые замыкаются через систему контактных пар не накоротко, а через переменные сопротивления (потенциометры – см. рис.).
Механическая характеристика асинхронного двигателя
Механическая характеристика асинхронного двигателя это зависимость частоты вращения вала двигателя от момента на его валу n2=f(M) или S=f(M). Механическая характеристика изображена на рис. 13. На характеристике можно выделить четыре характерные точки:
1 Точка идеального холостого хода. В ней М=0, S=0;
2 Точка номинального режима работы. В ней М=МН, S=SН. Значения n2Н и МН можно определить по каталожным данным двигателя;
3 Точка максимального или критического момента. В ней М=Мm, S=SK. Данная точка характеризует перегрузочную способность двигателя.
|
Рис. 13 |

В каталогах для определения параметров данной точки приводится величина кратности критического момента двигателя:
 .
.
Вам также может быть полезна лекция "24 Программирование таблиц решений".
Величина кратности позволяет определить максимально возможный момент двигателя.
4. Точка пуска. В ней М=МП, S=1. Данная точка характеризует пусковые свойства двигателя. В каталогах для определения пусковых свойств приводится величина кратности пускового момента двигателя:
 .
.
В каталогах приводится также коэффициент кратности пускового тока
который позволяет определить величину тока двигателя в момент пуска.


















